
X/ENS Informatique A MP 2022
| Thème de l'épreuve | Différentiation algorithmique |
| Principaux outils utilisés | programmation OCaml, calcul différentiel, calcul matriciel, programmation dynamique |
| Mots clefs | parenthésage, matrice jacobienne, différentielle, propagation avant, triangulation, produit vectoriel, règle de la chaîne |
Corrigé
: 👈 gratuite pour tous les corrigés si tu crées un compte👈 l'accès aux indications de tous les corrigés ne coûte que 5 € ⬅ clique ici
👈 gratuite pour tous les corrigés si tu crées un compte
- - - - - - - - - - - - - - - - - - - - - - - - - -
Énoncé complet
(télécharger le PDF)








Rapport du jury
(télécharger le PDF)
Énoncé obtenu par reconnaissance optique des caractères
ECOLE POLYTECHNIQUE
ECOLES NORMALES SUPERIEURES
CONCOURS D'ADMISSION 2022
MARDI 26 AVRIL 2022
14h00 - 18h00
FILIERE MP
-
Epreuve n° 4
INFORMATIQUE A (XULSR)
Durée : 4 heures
L'utilisation des calculatrices n'est pas autorisée pour
cette épreuve
Cette composition ne concerne qu'une partie des candidats de la
filière MP, les autres candidats effectuant simultanément la
composition de Physique et Sciences de l'Ingénieur.
Pour la filière MP, il y a donc deux enveloppes de Sujets pour
cette séance.
Différentiation algorithmique
Le sujet comporte 12 pages, numérotées de 1 à 12.
Début de l'épreuve.
Dans ce sujet, on s'intéresse au problème de la différentiation algorithmique. Il s'agit de
calculer efficacement des différentielles d'expressions mathématiques vues comme des composées
de fonctions élémentaires. C'est l'une des pierres fondatrices du calcul formel, ainsi que de la
descente de gradient dans les réseaux de neurones.
Ce sujet est constitué de cinq parties. La première partie est formée de préliminaires utiles
dans le reste du sujet, mais les fonctions qui y sont définies peuvent être admises pour traiter les
parties suivantes. La troisième partie est largement indépendante de la deuxième, à l'exception
de la question III.7. La quatrième partie nécessite d'avoir compris les enjeux de la troisième
partie. Enfin, la cinquième et dernière partie est nettement indépendante du reste du sujet,
seule les questions V.1 et V.2 font référence aux sujets abordés avant.
1
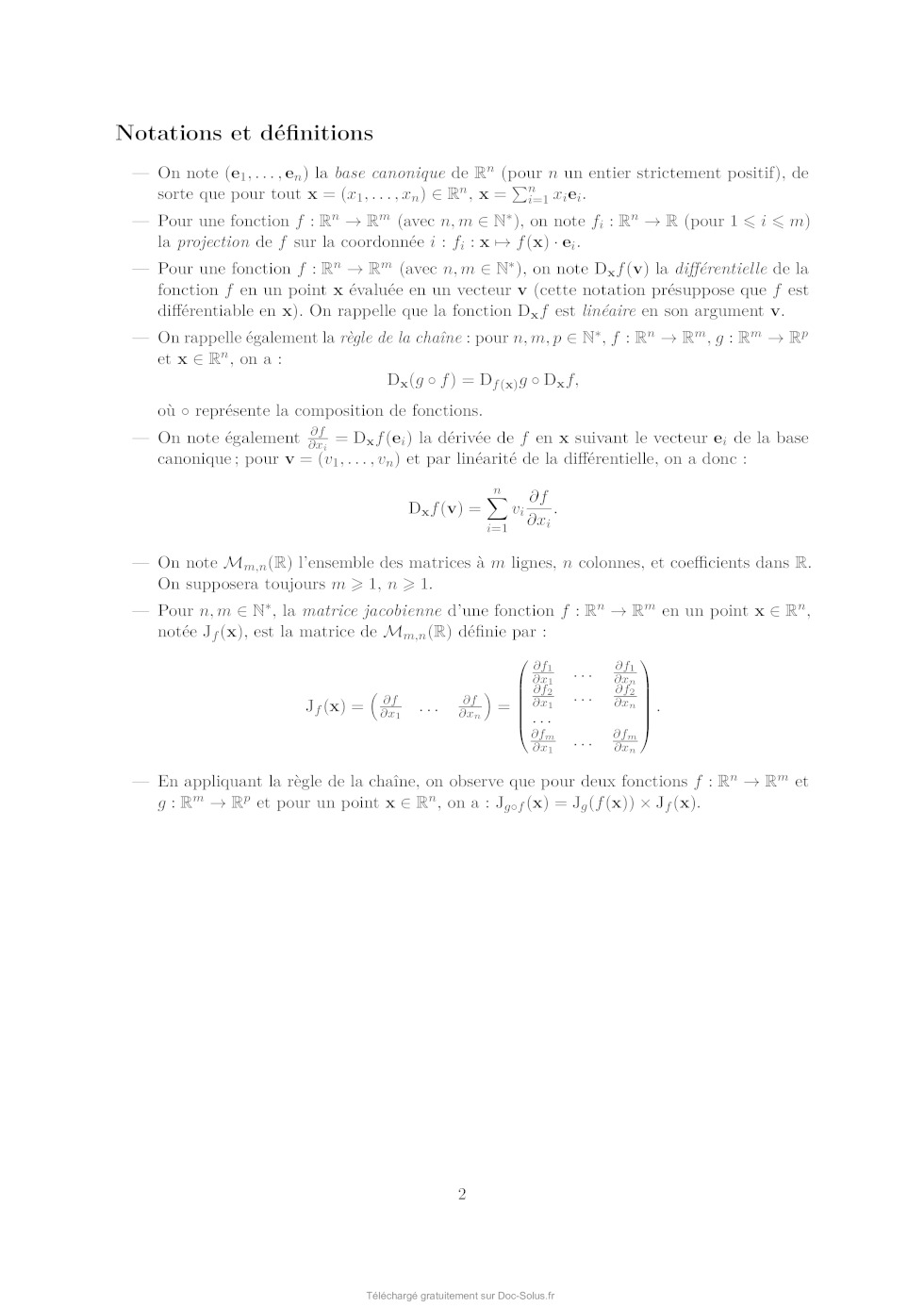
Notations et définitions
-- On note (e1 , . . . , en ) la base canonique de Rn (pour n un entier strictement positif), de
P
sorte que pour tout x = (x1 , . . . , xn ) Rn , x = ni=1 xi ei .
-- Pour une fonction f : Rn Rm (avec n, m N ), on note fi : Rn R (pour 1 i m)
la projection de f sur la coordonnée i : fi : x 7 f (x) · ei .
-- Pour une fonction f : Rn Rm (avec n, m N ), on note Dx f (v) la différentielle de la
fonction f en un point x évaluée en un vecteur v (cette notation présuppose que f est
différentiable en x). On rappelle que la fonction Dx f est linéaire en son argument v.
-- On rappelle également la règle de la chaîne : pour n, m, p N , f : Rn Rm , g : Rm Rp
et x Rn , on a :
Dx (g f ) = Df (x) g Dx f,
où représente la composition de fonctions.
f
-- On note également x
= Dx f (ei ) la dérivée de f en x suivant le vecteur ei de la base
i
canonique ; pour v = (v1 , . . . , vn ) et par linéarité de la différentielle, on a donc :
Dx f (v) =
n
X
i=1
vi
f
.
xi
-- On note Mm,n (R) l'ensemble des matrices à m lignes, n colonnes, et coefficients dans R.
On supposera toujours m 1, n 1.
-- Pour n, m N , la matrice jacobienne d'une fonction f : Rn Rm en un point x Rn ,
notée Jf (x), est la matrice de Mm,n (R) définie par :
Jf (x) =
f
x1
...
f1
x1
f2
f
x1
xn = . . .
fm
x1
...
...
f1
xn
f2
xn .
...
fm
xn
-- En appliquant la règle de la chaîne, on observe que pour deux fonctions f : Rn Rm et
g : Rm Rp et pour un point x Rn , on a : Jgf (x) = Jg (f (x)) × Jf (x).
2
Complexité
Par complexité en temps d'un algorithme A, on entend le nombre d'opérations élémentaires
(comparaison, addition, soustraction, multiplication, division, affectation, test, etc.) nécessaires
à l'exécution de A dans le cas le pire.
Par complexité en mémoire d'un algorithme A, on entend l'espace mémoire total utilisé par
l'exécution de A dans le cas le pire, en supposant que l'espace mémoire occupé pour stocker
une valeur d'un type de base (entier, booléen, flottant, caractère) est une constante.
Lorsque la complexité (en temps ou en espace) dépend d'un paramètre , on dit que A
a une complexité (en temps ou en espace) en O(f ()) s'il existe une constante C > 0 telle
que, pour toutes les valeurs de suffisamment grandes (c'est-à-dire plus grandes qu'un certain
seuil), pour toute instance du problème de paramètre , la complexité (en temps ou en espace)
est au plus C · f () ; on dit que A a une complexité (en temps ou en espace) en (f ()) s'il
existe une constante C > 0 telle que, pour toutes les valeurs de suffisamment grandes, pour
toute instance du problème de paramètre , la complexité (en temps ou en espace) est au
moins C · f (). Enfin, on a une complexité en (f ()) quand elle est à la fois en O(f ()) et en
(f ()).
Quand l'on demande la complexité d'un algorithme, il s'agit de trouver une expression
en (·) la plus simple possible. On dit qu'un algorithme est linéaire en si sa complexité en
temps est en ().
Rappels OCaml
-- On rappelle les opérations de base sur les nombres en virgule flottante (ou flottants), que
l'on utilisera pour représenter des nombres réels dans OCaml :
-- 1.0 et 0.0 (ou 1. et 0.) représentent les nombres 1 et 0 respectivement.
-- L'addition entre deux flottants a et b s'écrit a +. b.
-- La multiplication entre deux flottants a et b s'écrit a *. b.
-- On rappelle quelques opérations de base sur les tableaux :
-- Array.length: 'a array -> int donne la longueur d'un tableau.
-- Array.make: int -> 'a -> 'a array permet de créer un tableau : Array.make m r
crée un tableau de taille m dont toutes les cases sont initialisées à r.
-- Array.make_matrix: int -> int -> 'a -> 'a array array permet de créer une
matrice : Array.make_matrix m n r crée une matrice de taille m × n dont toutes
les cases sont initialisées à r.
-- Enfin, une opération de base sur les listes :
-- List.rev: 'a list -> 'a list renvoie le miroir de la liste passée en argument
(cette fonction a une complexité linéaire en la taille de la liste).
Dans l'ensemble du sujet, il sera fréquemment question de matrices de flottants. Pour
simplifier l'écriture du type des fonctions manipulant de telles matrices, nous définissons le
type matrix :
type matrix = float array array;;
3
Partie I
Question I.1.
Donner une fonction OCaml
identite: int -> matrix
prenant en entrée un entier n N et renvoyant la matrice identité de Mn,n (R).
Question I.2.
Donner une fonction OCaml
scalaire: float array -> float array -> float
prenant en entrée deux vecteurs u et v et renvoyant le produit scalaire u · v.
Question I.3.
Donner une fonction OCaml
mul_possible: matrix -> matrix -> bool
prenant en entrée deux matrices A et B et renvoyant true si et seulement si les dimensions de
A et B sont telles que A × B est bien définie.
Question I.4.
Donner une fonction OCaml
mul: matrix -> matrix -> matrix
qui calcule le produit A × B des deux matrices A et B de flottants passées en argument. Si
A est de dimension m × n et B de dimension n × p, on impose que la fonction mul effectue
m × n × p multiplications de flottants.
Dans l'ensemble du sujet, on utilisera la fonction mul à chaque fois qu'il s'agit de calculer le
produit de deux matrices, sans chercher à rendre ce calcul plus efficace.
4
Partie II
Dans cette partie, on s'intéresse à la multiplication d'une suite finie de matrices réelles (B i )1in .
Soit k0 , . . . , kn la suite finie d'entiers tels que B i Mki-1 ,ki (R). On cherche à écrire un
programme effectuant le parenthésage optimal sur les B i pour un calcul efficace de leur
multiplication B 1 × · · · × B n . Pour chaque 1 i j n, on note B i,j le produit de
matrices B i × · · · × B j , et pi,j le nombre minimum de multiplications de flottants nécessaires
pour calculer B i,j . On rappelle que l'on réutilisera la fonction mul de la partie précédente
implémentant la multiplication de deux matrices, que l'on ne cherchera pas à améliorer.
Question II.1. On suppose (dans cette question uniquement) n = 3. Comparer le nombre
de multiplications de flottants effectuées en évaluant (B 1 × B 2 ) × B 3 avec mul et en évaluant
B 1 ×(B 2 ×B 3 ) avec mul. Que faut-il en conclure sur l'ordre d'évaluation du produit B 1 ×B 2 ×B 3 ?
Question II.2.
Donner une fonction OCaml
muld: matrix list -> matrix
qui prend en entrée une liste non vide de matrices (B 1 , . . . , B n ) et renvoie leur multiplication
(en utilisant mul) via un parenthésage à droite : B 1 × (B 2 × (. . . )).
Question II.3.
Donner une fonction OCaml
mulg: matrix list -> matrix
qui prend en entrée une liste non vide de matrices (B 1 , . . . , B n ) et renvoie leur multiplication
(en utilisant mul) via un parenthésage à gauche : ((. . . ) × B n-1 ) × B n .
Question II.4. Donner une fonction OCaml min_mul: int array -> int, qui prend en
entrée le tableau k = [k0 , . . . , kn ] des tailles de chacune des matrices, et renvoie p1,n en faisant
des appels récursifs pour calculer les pi,j , sans stockage d'information supplémentaire. Montrer
que si, pour tout i, ki 2, la complexité en temps de min_mul est au moins exponentielle en n,
c'est-à-dire en (2n ).
Question II.5. Donner une fonction OCaml min_mul_opt: int array -> int qui calcule
le même nombre, mais où une matrice auxiliaire de taille n × n, initialement nulle, permet de
stocker les valeurs de pi,j déjà calculées. Quelle est la complexité en temps de min_mul_opt en
fonction de n ? En espace ?
Question II.6. Donner une fonction OCaml mul_opt: matrix array -> matrix qui prend
en entrée le tableau des matrices [B 1 , . . . , B n ] et calcule B 1,n en p1,n multiplications de flottants.
5
Partie III
On se propose d'étudier deux manières de calculer la différentiation de la composition d'une liste
de fonctions. Soient f 1 , f 2 , . . . , f n des fonctions de type f i : Rki-1 Rki pour k0 , . . . , kn N .
On note f = f n · · · f 1 . Il s'agit d'optimiser le calcul successif de la valeur de f i et de celle de
sa différentielle en un point. On note Jxi Mki ,ki-1 (R) la matrice jacobienne de f i en x Rki-1 .
Pour tout i, on note J i la fonction
i
J :
Question III.1.
( k
R i-1 M
ki ,ki-1 (R)
i
x 7 Jx .
-
Pour une fonction f : Rn Rm avec n, m N , on note Df la fonction :
(x, h) 7 (f (x), (Dx f ) h).
Si on impose que le domaine de la fonction h est Rp pour un certain p N , quels sont l'ensemble
-
de départ (domaine) et l'ensemble d'arrivée (codomaine) de la fonction Df ? Montrer que
-
l'opérateur D vérifie :
-
-
-
D(g f ) = Dg Df.
Question III.2. Pour deux fonctions f 1 : Rk0 Rk1 et f 2 : Rk1 Rk2 et un point x Rk0 ,
-
montrer que Df 2 (f 1 (x), Dx f 1 ) = ((f 2 f 1 )(x), Dx (f 2 f 1 )).
Question III.3.
Donner une fonction OCaml forward de type :
float array ->
(float array -> float array) list ->
((float array -> float array) -> float array -> matrix) ->
matrix
qui prend en entrée un point x Rk0 , une liste de fonctions f 1 , . . . , f n de type f i : Rki-1 Rki ,
et une fonction
diff: (float array -> float array) -> float array -> matrix
renvoyant la jacobienne d'une fonction en un point passé en argument, et calcule la matrice
représentant Dx (f n · · · f 1 ) via un parenthésage à droite de la forme Dx (f n (f n-1 . . . )). On
-
s'appuiera sur la définition de D et sur la propriété établie à l'aide de la question précédente.
On pourra s'aider d'une fonction récursive auxiliaire. Prouver la correction de cette fonction.
Question III.4. Quelle est la complexité en temps de cette fonction dans le cas où ki = 2i ?
Dans le cas où pour tout i, ki = k avec k 2 une constante quelconque ? On supposera que les
appels à la fonction diff se font en temps proportionnel à la taille de la matrice jacobienne
renvoyée par cette fonction.
6
Question III.5. Donner une fonction backward de type identique à forward qui prend en
entrée un point x Rk0 , une liste de fonctions f 1 , . . . , f n de type f i : Rki-1 Rki , et une
fonction
diff: (float array -> float array) -> float array -> matrix
renvoyant la jacobienne d'une fonction en un point passé en argument, et calcule la matrice
représentant Dx (f n · · · f 1 ) via un parenthésage à gauche de la forme Dx ((· · · f 2 ) f 1 ).
Question III.6. Pour une liste de fonctions de longueur n arbitraire, donner un exemple de
cas où backward est plus efficace que forward, ainsi que de cas où forward est plus efficace
que backward.
Question III.7. Sans écrire explicitement de fonction, expliquer comment adapter les techniques des questions de la partie II pour écrire une fonction diff_opt qui prend en entrée
x Rk0 , une liste de n fonctions f 1 , . . . , f n de type f i : Rki-1 Rki , et un tableau de n
fonctions [J 1 , . . . , J n ] et calcule avec un minimum de multiplications de flottants la matrice
jacobienne de f = f n · · · f 1 en x.
7
Partie IV
La représentation d'une suite d'instructions mathématiques comme une composition de
fonctions est assez peu concise. En particulier, elle ne tient pas compte des dépendances linéaires
entre les instructions. Considérons par exemple la fonction :
(
f:
R2 R
(x, y) 7 (cos x)2 + (cos x)3 × ( 2 · y)
On peut l'écrire comme une composition f = f 4 f 3 f 2 f 1 avec :
f1 :
(x, y) 7 (cos x, 2 · y)
f2 :
(x, y) 7 (x2 , x3 , y)
f 3 : (x, y, z) 7 (x, y × z)
f4 :
(x, y) 7 x + y
Propager la différentielle des fonctions f i pour 1 i 4 est une perte de temps. En effet, on
manipule des fonctions qui ne font pas usage de certaines de leur variables, et on différencie des
fonctions potentiellement linéaires, comme la fonction f 4 . On peut représenter plus finement les
suites d'instructions mathématiques comme des graphes acycliques. Par exemple, la fonction f
ci-dessus se dessine comme suit :
x
cos x
(cos x)2
(cos x)3
y
(cos x)3 × ( 2 · y)
(cos x)2 + (cos x)3 × ( 2 · y)
2·y
On décrit un tel graphe comme un tableau T de sommets. Chaque sommet u contient deux
informations : la fonction élémentaire qu'il représente et le tableau de ses prédécesseurs (les
sommets v tels qu'il y a une arête de v à u). Comme le graphe est acyclique, on peut faire
l'hypothèse que s'il y a une arête de v à u, l'indice de v dans T est strictement inférieur à l'indice
de u dans T . On suppose par ailleurs que l'on ne manipule que des fonctions élémentaires à
valeurs réelles Rn R. Ces fonctions élémentaires sont alors représentées par une paire de
type (float array -> float) * (float array -> float array), où le deuxième élément
représente la différentielle du premier élément (comme la fonction est à valeurs réelles, sa
différentielle en un point est représentée directement par un vecteur et non par une matrice).
On définit donc les types OCaml suivants :
type fonction_elementaire =
(float array -> float) * (float array -> float array);;
type sommet_avant = {fct : fonction_elementaire; pred : int array};;
type graphe_avant = sommet_avant array;;
Lors du calcul par propagation avant de la différentielle d'une fonction, on parcourt le
graphe de cette fonction de la gauche vers la droite, c'est-à-dire des sommets correspondant
aux variables au sommet correspondant à la fonction complète, en traitant les prédécesseurs
8
d'un sommet avant celui-ci. On stocke dans un tableau de propagation avant, au fur et à mesure,
les valeurs de chaque fonction élémentaire et de sa différentielle en les points pertinents. Pour
les sommets d'un graphe de fonction correspondant aux variables, le contenu du champ fct
n'importe pas, car ils n'ont pas de prédécesseurs.
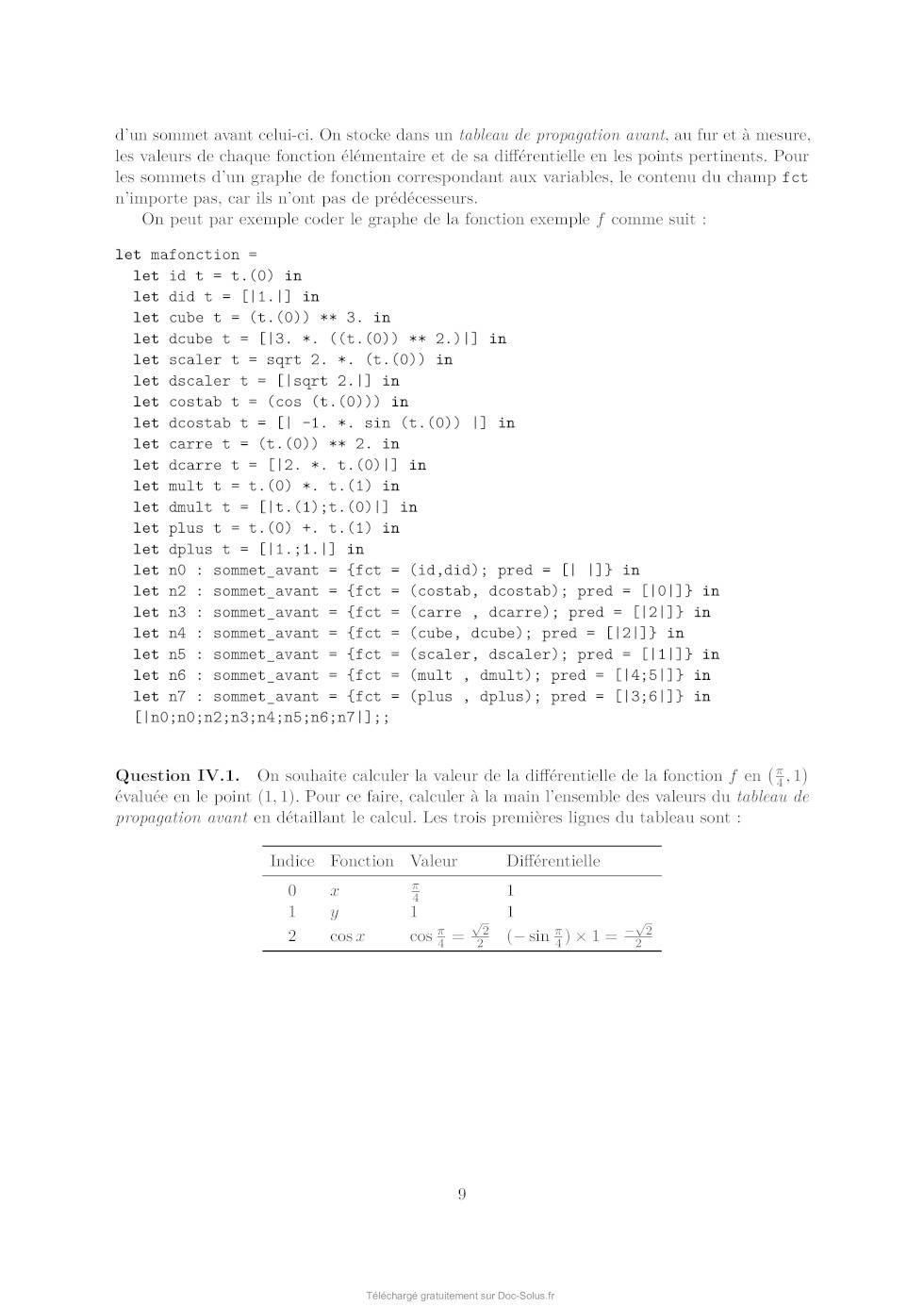
On peut par exemple coder le graphe de la fonction exemple f comme suit :
let mafonction =
let id t = t.(0) in
let did t = [|1.|] in
let cube t = (t.(0)) ** 3. in
let dcube t = [|3. *. ((t.(0)) ** 2.)|] in
let scaler t = sqrt 2. *. (t.(0)) in
let dscaler t = [|sqrt 2.|] in
let costab t = (cos (t.(0))) in
let dcostab t = [| -1. *. sin (t.(0)) |] in
let carre t = (t.(0)) ** 2. in
let dcarre t = [|2. *. t.(0)|] in
let mult t = t.(0) *. t.(1) in
let dmult t = [|t.(1);t.(0)|] in
let plus t = t.(0) +. t.(1) in
let dplus t = [|1.;1.|] in
let n0 : sommet_avant = {fct = (id,did); pred = [| |]} in
let n2 : sommet_avant = {fct = (costab, dcostab); pred = [|0|]} in
let n3 : sommet_avant = {fct = (carre , dcarre); pred = [|2|]} in
let n4 : sommet_avant = {fct = (cube, dcube); pred = [|2|]} in
let n5 : sommet_avant = {fct = (scaler, dscaler); pred = [|1|]} in
let n6 : sommet_avant = {fct = (mult , dmult); pred = [|4;5|]} in
let n7 : sommet_avant = {fct = (plus , dplus); pred = [|3;6|]} in
[|n0;n0;n2;n3;n4;n5;n6;n7|];;
Question IV.1. On souhaite calculer la valeur de la différentielle de la fonction f en 4 , 1
évaluée en le point (1, 1). Pour ce faire, calculer à la main l'ensemble des valeurs du tableau de
propagation avant en détaillant le calcul. Les trois premières lignes du tableau sont :
Indice Fonction Valeur
0
1
2
x
y
cos x
4
1
cos 4 = 22
9
Différentielle
1
1
(- sin 4 ) × 1 = -2 2
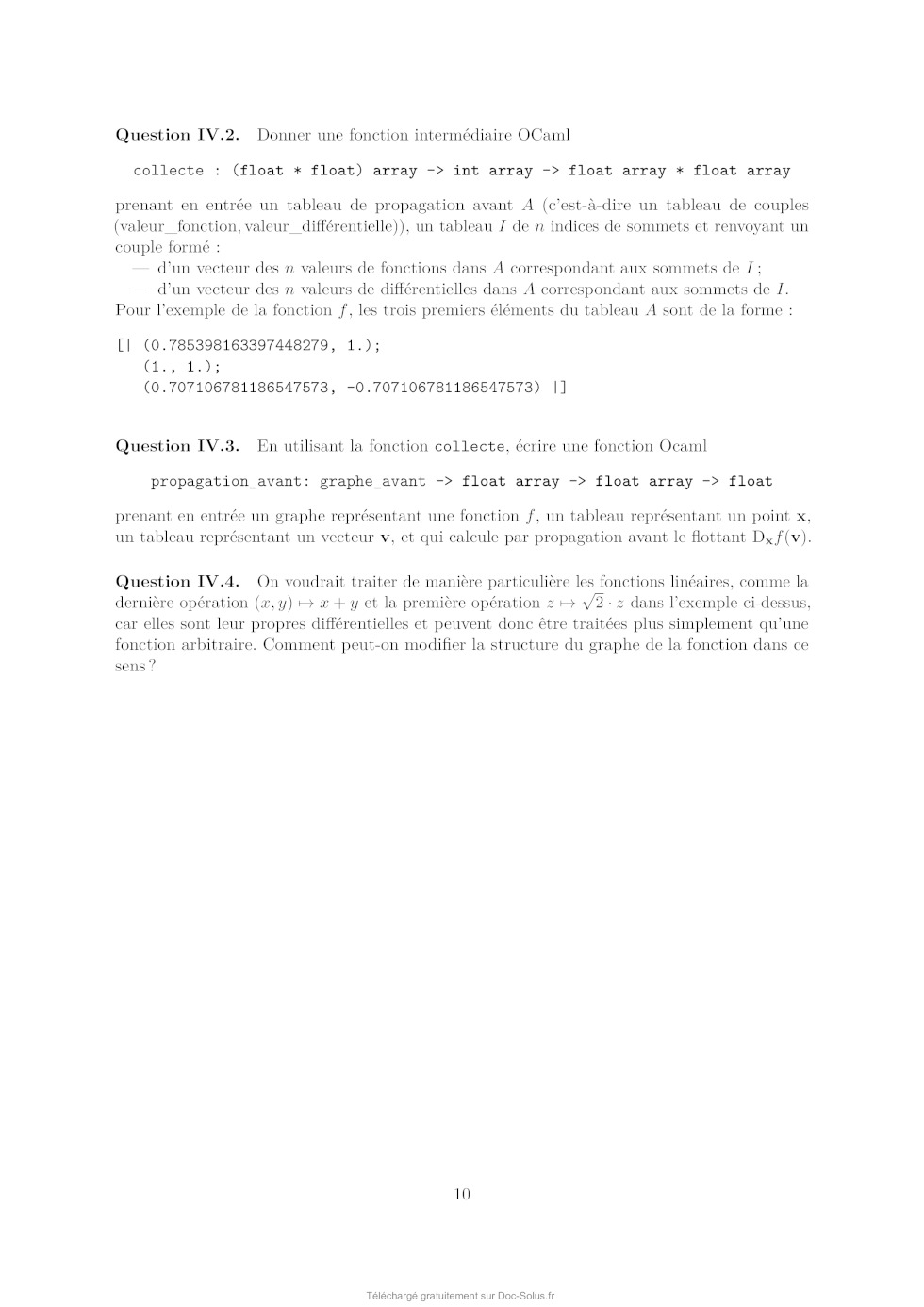
Question IV.2.
Donner une fonction intermédiaire OCaml
collecte : (float * float) array -> int array -> float array * float array
prenant en entrée un tableau de propagation avant A (c'est-à-dire un tableau de couples
(valeur_fonction, valeur_différentielle)), un tableau I de n indices de sommets et renvoyant un
couple formé :
-- d'un vecteur des n valeurs de fonctions dans A correspondant aux sommets de I ;
-- d'un vecteur des n valeurs de différentielles dans A correspondant aux sommets de I.
Pour l'exemple de la fonction f , les trois premiers éléments du tableau A sont de la forme :
[| (0.785398163397448279, 1.);
(1., 1.);
(0.707106781186547573, -0.707106781186547573) |]
Question IV.3.
En utilisant la fonction collecte, écrire une fonction Ocaml
propagation_avant: graphe_avant -> float array -> float array -> float
prenant en entrée un graphe représentant une fonction f , un tableau représentant un point x,
un tableau représentant un vecteur v, et qui calcule par propagation avant le flottant Dx f (v).
Question IV.4. On voudrait traiter de manière particulière les
fonctions linéaires, comme la
dernière opération (x, y) 7 x + y et la première opération z 7 2 · z dans l'exemple ci-dessus,
car elles sont leur propres différentielles et peuvent donc être traitées plus simplement qu'une
fonction arbitraire. Comment peut-on modifier la structure du graphe de la fonction dans ce
sens ?
10
Partie V
Une triangulation d'un polygone correspond à la partition du polygone en triangles dont les
sommets sont des sommets du polygone.
Question V.1. On considère des polygones convexes dont chaque sommet est étiqueté par un
poids (entier naturel non nul). On définit le coût d'un triangle comme le produit des poids des
trois sommets, et le coût d'une triangulation d'un polygone comme la somme des coûts de tous
ses triangles. Montrer que le nombre minimum de multiplications de flottants nécessaires pour
calculer la multiplication de n 2 matrices (au sens de la partie II) est égal au coût minimum
d'une triangulation d'un certain polygone convexe.
Question V.2. On reprend les notations de la partie II : soit une suite de matrices de
flottants (B i )1in et k0 , . . . , kn la suite d'entiers tels que B i Mki-1 ,ki (R). On suppose de
plus k0 = kn . Montrer que le nombre minimal de multiplications de flottants nécessaires au
calcul de B 1 × · · · × B n-1 est égal au nombre minimal de multiplications de flottants nécessaires
au calcul de B n × B 1 × · · · × B n-2 .
Oublions désormais les poids sur les sommets de la triangulation d'un polygone. On représente
un polygone comme un tableau de points dans R × R. Il y a une arête entre deux sommets
successifs du tableau, ainsi qu'entre la première et la dernière valeur.
type polygone = (float * float) array
Un polygone est dit simple si deux arêtes non consécutives ne se croisent pas, et deux arêtes
consécutives n'ont en commun que l'un de leurs sommets. On ne considéra que des polygones
simples et on ne cherchera pas à vérifier leur simplicité.
Polygone simple
Polygone non-simple
On formalise la triangulation d'un polygone comme une liste d'arêtes à ajouter au polygone.
Les sommets du polygone sont désignés par leur place dans le tableau représentant le polygone :
le premier sommet est celui en position 0 dans le tableau, etc. Une arête entre le i-ème sommet
du polygone et le j-ème sommet est décrite comme un couple d'entiers (i, j) avec i < j. 11 Question V.3. Donner une fonction OCaml testant la convexité d'un polygone simple : est_convexe: polygone -> bool.
Indication : On pourra utiliser l'orientation de produits vectoriels de vecteurs bien choisis.
Question V.4.
elle ? Justifier.
Combien d'arêtes la triangulation d'un polygone convexe à n cotés introduit-
Question V.5.
Donner une fonction OCaml
triangule_convexe: polygone -> (int * int) list
qui prend en entrée un polygone supposé convexe et renvoie une triangulation de ce polygone
sous la forme d'une liste d'arêtes en un temps linéaire en le nombre de sommets du polygone.
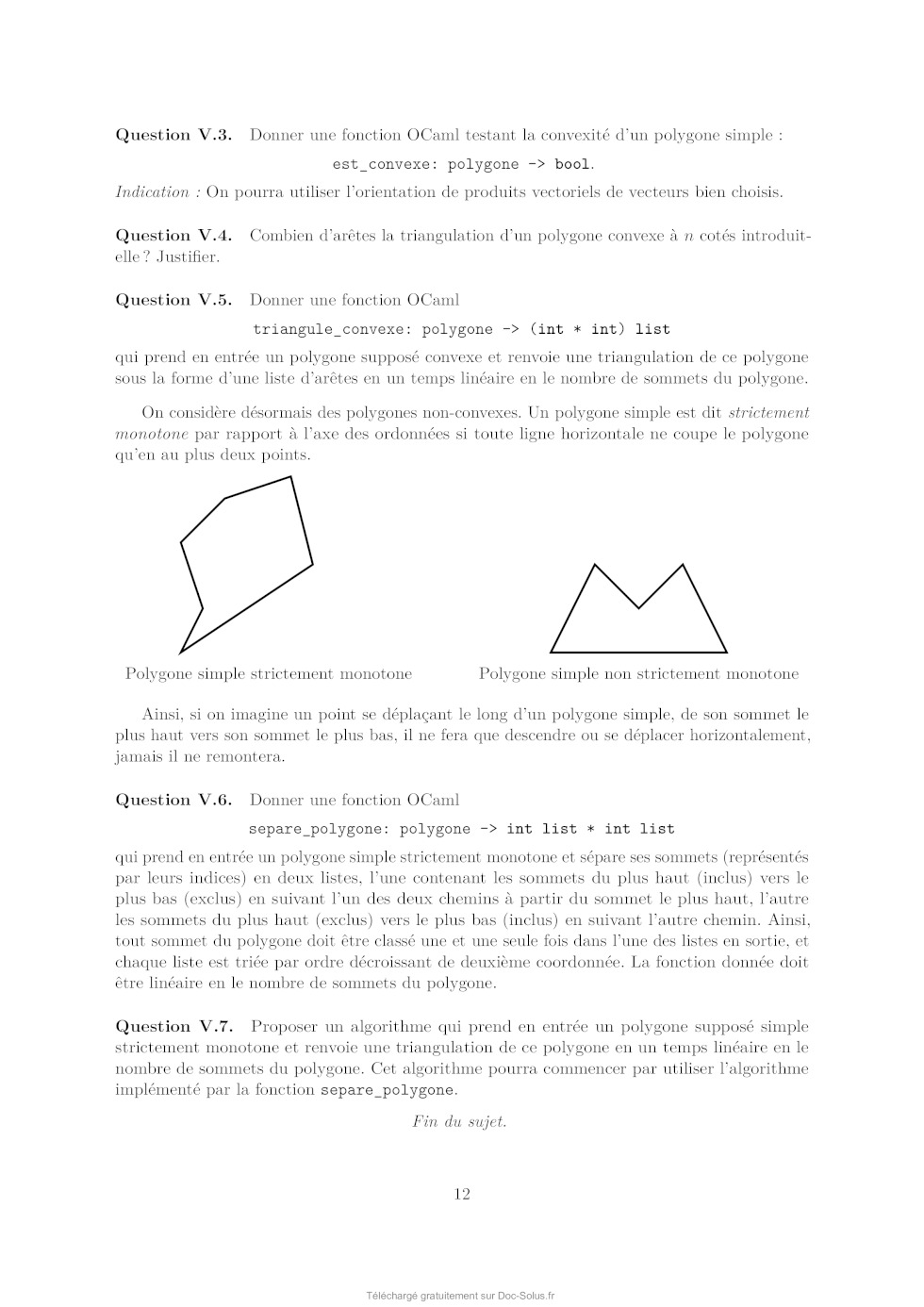
On considère désormais des polygones non-convexes. Un polygone simple est dit strictement
monotone par rapport à l'axe des ordonnées si toute ligne horizontale ne coupe le polygone
qu'en au plus deux points.
Polygone simple strictement monotone
Polygone simple non strictement monotone
Ainsi, si on imagine un point se déplaçant le long d'un polygone simple, de son sommet le
plus haut vers son sommet le plus bas, il ne fera que descendre ou se déplacer horizontalement,
jamais il ne remontera.
Question V.6.
Donner une fonction OCaml
separe_polygone: polygone -> int list * int list
qui prend en entrée un polygone simple strictement monotone et sépare ses sommets (représentés
par leurs indices) en deux listes, l'une contenant les sommets du plus haut (inclus) vers le
plus bas (exclus) en suivant l'un des deux chemins à partir du sommet le plus haut, l'autre
les sommets du plus haut (exclus) vers le plus bas (inclus) en suivant l'autre chemin. Ainsi,
tout sommet du polygone doit être classé une et une seule fois dans l'une des listes en sortie, et
chaque liste est triée par ordre décroissant de deuxième coordonnée. La fonction donnée doit
être linéaire en le nombre de sommets du polygone.
Question V.7. Proposer un algorithme qui prend en entrée un polygone supposé simple
strictement monotone et renvoie une triangulation de ce polygone en un temps linéaire en le
nombre de sommets du polygone. Cet algorithme pourra commencer par utiliser l'algorithme
implémenté par la fonction separe_polygone.
Fin du sujet.
12