
CCINP Modélisation et Ingénierie numérique PSI 2015
| Thème de l'épreuve | Dispositif médical d'injection |
| Principaux outils utilisés | asservissements, mécanique du solide, mécanique des fluides, diffusion thermique, informatique |
| Mots clefs | pivot de Gauss, écoulement de Poiseuille, débitmètre à fil chaud |
Corrigé
: 👈 gratuite pour tous les corrigés si tu crées un compte👈 l'accès aux indications de tous les corrigés ne coûte que 5 € ⬅ clique ici
👈 gratuite pour tous les corrigés si tu crées un compte
- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
Énoncé complet
(télécharger le PDF)


Rapport du jury
(télécharger le PDF)
Énoncé obtenu par reconnaissance optique des caractères
SESSION 2015 PSIMIO6
_:â=_ CONCOURS COMMUNS
- - POLYTECHNIQUES
EPREUVE SPECIFIQUE - FILIERE PSI
MODELISATION ET INGENIERIE NUMERIQUE
Durée : 4 heures
N.B. : le candidat attachera la plus grande importance à la clarté, a la
précision et a la concision de
la rédaction. Si un candidat est amené à repérer ce qui peut lui sembler être
une erreur d 'e'noncé, il le
signalera sur sa copie et devra poursuivre sa composition en expliquant les
raisons des initiatives
qu 'il a été amené à prendre.
'Les calculatrices sont autorisées
Le sujet comporte 16 pages dont :
-- 14 pages de texte de présentation et énoncé du sujet;
-- 2 pages d'annexes.
Toute documentation autre que celle fournie est interdite.
REMARQUES PRELIMINAIRES
Les développements mathématiques, les schémas, les graphes et les courbes
seront rendus dans
leur forme définitive sur la copie (les brouillons ne seront pas acceptés).
Il est demandé au candidat de bien vouloir inscrire les résultats et les
développements nécessaires
aux différentes questions sur sa c0pie7 en précisant bien le numéro de la
question traitée
et, si possible, dans l'ordre des questions. Les résultats attendus seront
obligatoirement
entourés.
1/16
Dispositif Médical d'Injection
I Présentation du système
Les problèmes de contamination ont engendré le développement de systèmes pour
protéger
les aiguilles d'injection et ainsi limiter les risques d'accidents.
De nombreux dispositifs sont ac--
tuellement développés afin d'améliorer
la qualité des injections ou l'ergono--
mie pour les patients pour améliorer
l'adhésion au traitement.
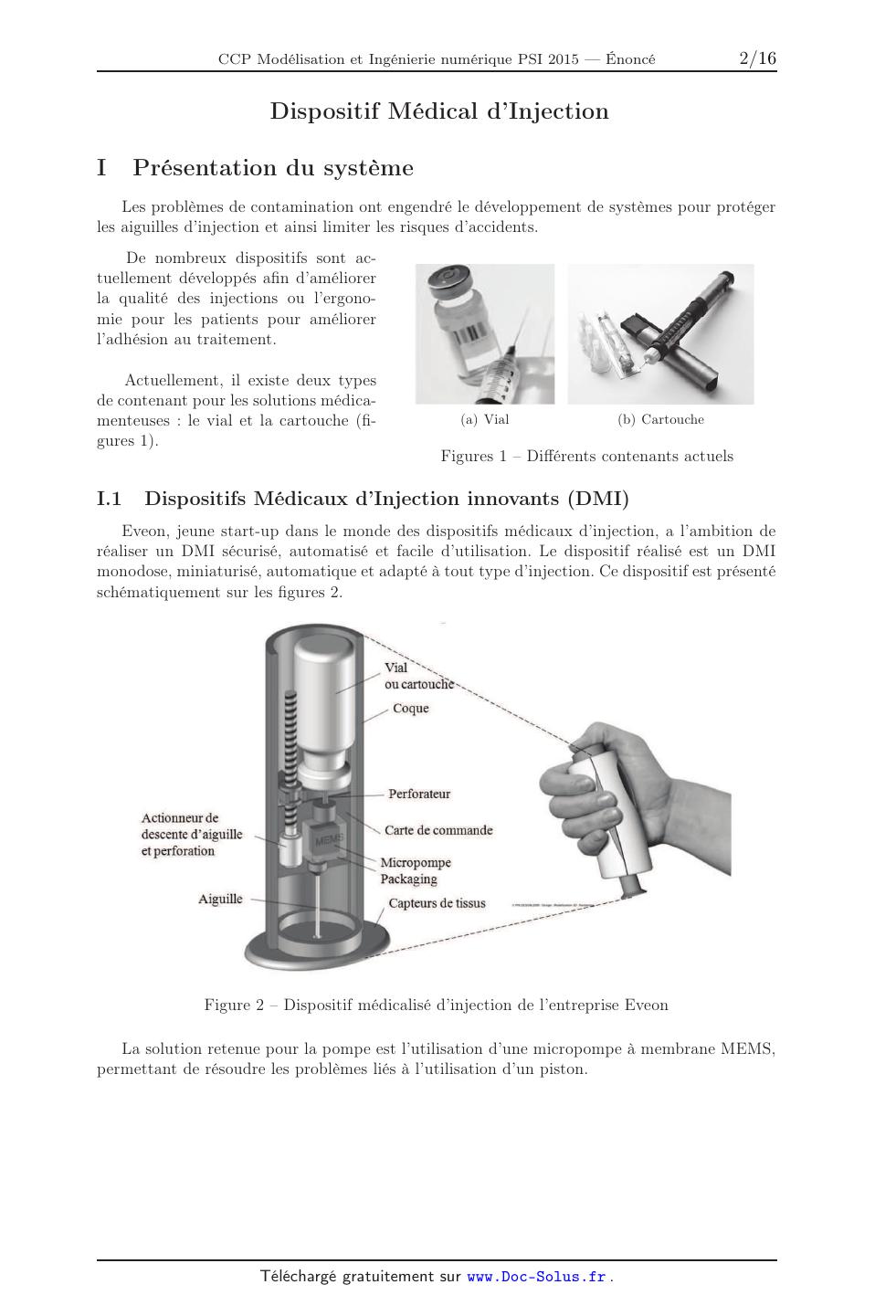
Actuellement, il existe deux types
de contenant pour les solutions médica--
menteuses : le Vial et la cartouche (fi--
gures 1).
(b) Cartouche
Figures 1 -- Différents contenants actuels
I.1 Dispositifs Médicaux d'Injection innovants (DMI)
Eveon, jeune start--up dans le monde des dispositifs médicaux d'injection, a
l'ambition de
réaliser un DMI sécurisé, automatisé et facile d'utilisation. Le dispositif
réalisé est un DMI
monodose, miniaturisé, automatique et adapté a tout type d'injection. Ce
dispositif est présenté
schématiquement sur les figures 2.
V1al
ou cafloucfi'e'.'
Coque "\
Perfomæur
Acüonneur de
descente d'aiguifle
et perforation
\ Carte de commande
' Micmpompe
Packaging
Anguille Capteurs de tissus ......-- ---- ...._.._.,,/--'
Figure 2 -- Dispositif médicalisé d'injection de l'entreprise Eveon
La solution retenue pour la pompe est l'utilisation d'une micropompe a membrane
MEMS,
permettant de résoudre les problèmes liés a l'utilisation d'un piston.
2/16
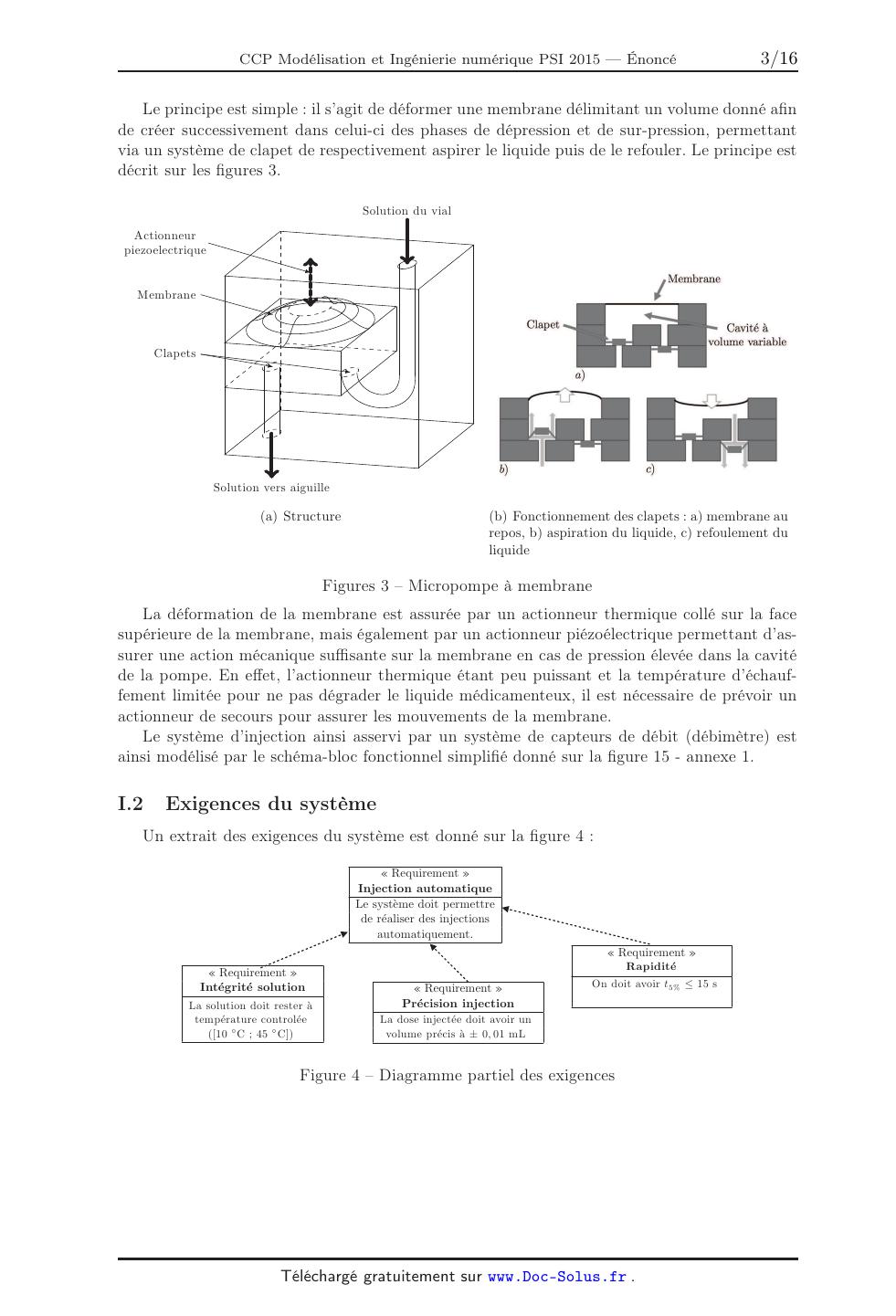
Le principe est simple : il s'agit de déformer une membrane délimitant un
volume donné afin
de créer successivement dans celui--ci des phases de dépression et de
sur--pression, permettant
via un système de clapet de respectivement aspirer le liquide puis de le
refouler. Le principe est
décrit sur les figures 3.
Solution du vial
Actionneur .
piezoelectrique
Membrane
Membrane \ /
« ,_ »
[w. Clapet
Clapets \ , /
Cavité à
volume variable
Solution vers aiguille
(b) Fonctionnement des clapets : a) membrane au
repos, b) aspiration du liquide, c) refoulement du
liquide
(a) Structure
Figures 3 -- Micropompe a membrane
La déformation de la membrane est assurée par un actionneur thermique collé sur
la face
supérieure de la membrane, mais également par un actionneur piézoélectrique
permettant d'as--
surer une action mécanique suffisante sur la membrane en cas de pression élevée
dans la cavité
de la pompe. En effet, l'actionneur thermique étant peu puissant et la
température d'échauf--
fement limitée pour ne pas dégrader le liquide médicamenteux, il est nécessaire
de prévoir un
actionneur de secours pour assurer les mouvements de la membrane.
Le système d'injection ainsi asservi par un système de capteurs de débit
(débimètre) est
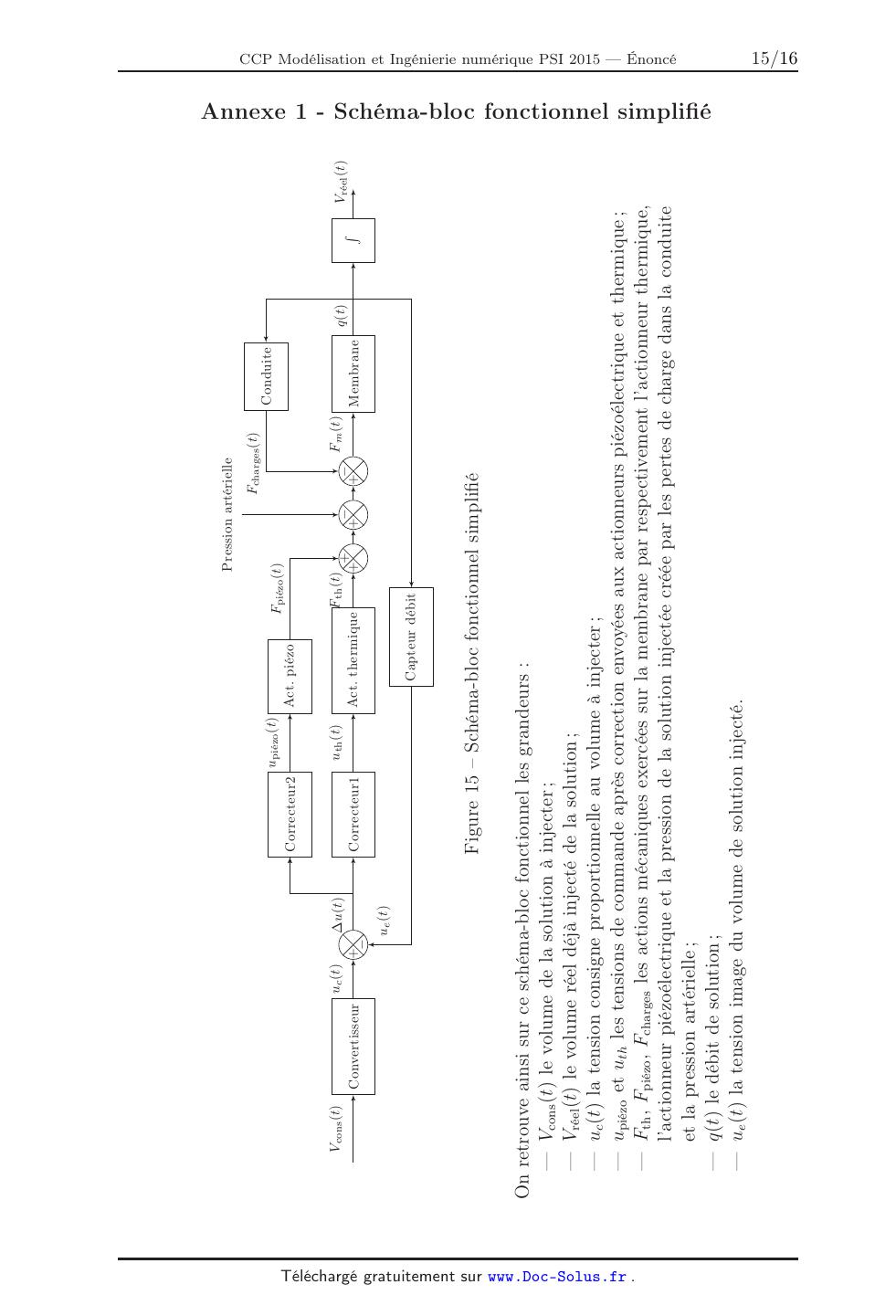
ainsi modélisé par le schéma--bloc fonctionnel simplifié donné sur la figure 15
-- annexe 1.
1.2 Exigences du système
Un extrait des exigences du système est donné sur la figure 4 :
<< Requirement >>
Injection automatique
de réaliser des injections
--v automatiquement.
Le système doit permettre '__
«
;
;
o
4
;
;
4
4
;
;
O
«
;
.;
«
<< Requireinent >>
Intégrité solution
La solution doit rester à
température controlée
([10 °C ; 45 °C])
"
'
\
<< Requirement >>
Rapidité
<< Requirement >>
Précision injection
On doit avoir t5% 5 15 s
La dose injectée doit avoir un
volume précis à i 0,01 mL
Figure 4 -- Diagramme partiel des exigences
3/16
Objectif
L'objectif de ce sujet est de modéliser le système médicalisé d'injection afin
de
vérifier les performances du cahier des charges concernant le contrôle de la
quantité
de solution injectée.
II Modélisation de l'asservissement du volume injecté
Objectif
L'objectif de cette partie est de modéliser l'ensemble de l'asservissement du
volume
injecté afin de vérifier que le systéme respecte l'exigence du cahier des
charges.
Dans la suite du sujet, la transformée de Laplace d'une fonction f(t) sera
notée F(p).
II.1 Actionneur thermique
Objectif
L'objectif de cette partie est de modéliser le fonctionnement de l'actionneur
ther-
mique.
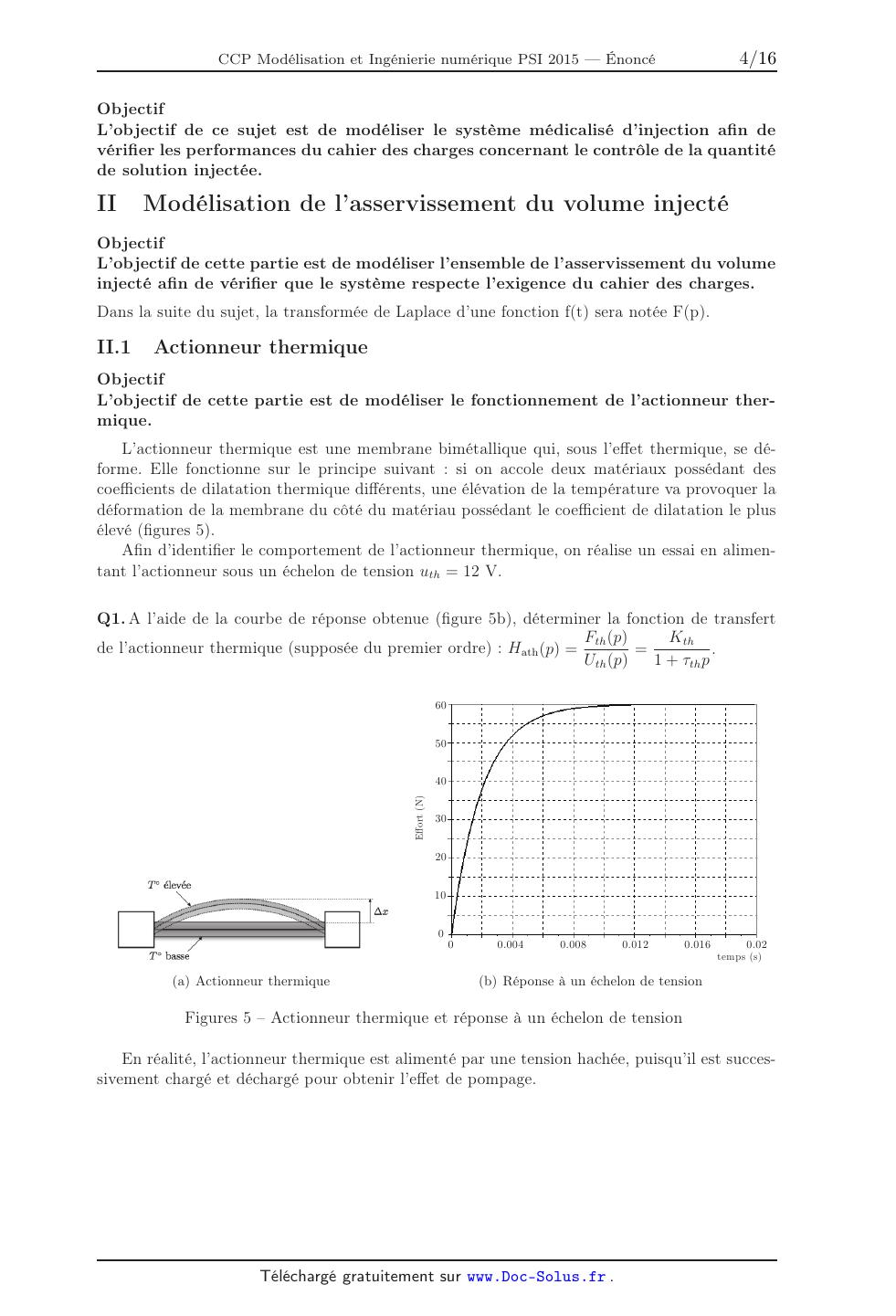
L'actionneur thermique est une membrane bimétallique qui, sous l'effet
thermique, se dé--
forme. Elle fonctionne sur le principe suivant : si on accole deux matériaux
possédant des
coefficients de dilatation thermique différents, une élévation de la
température va provoquer la
déformation de la membrane du côté du matériau possédant le coefficient de
dilatation le plus
élevé (figures 5).
Afin d'identifier le comportement de l'actionneur thermique, on réalise un
essai en alimen--
tant l'actionneur sous un échelon de tension ut}, : 12 V.
Q1. A l'aide de la courbe de réponse obtenue (figure 5b), déterminer la
fonction de transfert
F K
de l'actionneur thermique (supposée du premier ordre) : Hath(p) : "'(p) -- "'
Uth(p) _ 1 + Tthp'
Effort (N)
T° élevée
' / l-- 0 0004 0.008 0.012 0.016 002
T0 basse temps (8)
(a) Actionneur thermique (b) Réponse a un échelon de tension
Figures 5 -- Actionneur thermique et réponse a un échelon de tension
En réalité, l'actionneur thermique est alimenté par une tension hachée,
puisqu'il est succes--
sivement chargé et déchargé pour obtenir l'effet de pompage.
4/16
II.2 Ecoulement dans le canal de l'aiguille
Objectif
L'objectif de cette partie est de modéliser l'écoulement dans une conduite afin
de
déterminer la relation entre le débit dans la conduite et la pression en entrée
de
conduite.
Le canal de l'aiguille est modélisé par un tube cylindrique d'axe (0.2), de
longueur L et
de section circulaire de rayon R. Le fluide médicamenteux est assimilé à de
l'eau de masse
volumique p et de viscosité dynamique 77. L'écoulement unidirectionnel et
stationnaire se fait
dans le sens des ?: croissants. On note P(0) : P(z : 0) la pression à l'entrée
du canal et
P(L) : P(z : L) la pression à la sortie du canal.
Q2. Rappeler les hypothèses à vérifier pour pouvoir appliquer le théorème de
Bernoulli. Si le
canal est horizontal, comment s'exprime le théorème de Bernoulli entre l'entrée
et la sortie en
fonction de la perte de charge Ah homogène à une longueur ?
Q3. Définir et évaluer le nombre de Reynolds correspondant à l'écoulement dans
l'aiguille de
longueur 5 cm et de diamètre intérieur 200 mn dans le cas d'un débit de 5
mL-min_l. La
viscosité du fluide est 77 : 1,0.10_3 Pas.
Aa: < v2 >
Q4. Les pertes de charge régulières sont données par la relation Ah : AË 2
9
est l'accélération de la pesanteur et A le paramètre dit de frottements, sans
dimension. Que
représente < ?? > ? Quelle est la dimension de Aa: ? Que peut représenter Aa: ?
En déduire la
perte de charge entre l'entrée et la sortie de l'aiguille.
oùg
Q5. Un calcul non demandé ici montre que la vitesse moyenne de l'écoulement
dans la seringue
fï0)---FTL)
877L
du fluide noté Q pour cet écoulement.
est donnée par la relation < ?} > = R2. En déduire l'expression du débit
volumique
Q6. Pour une aiguille de longueur 50,0 mm et de diamètre intérieur 0,2 mm,
calculer, toujours
en négligeant la pesanteur, la valeur numérique de la pression à exercer au
sommet de la co--
lonne de liquide pour assurer un débit de 5,0 mL-min_1 a la sortie de
l'aiguille. On prendra
77 = 1,0 - 10_3 Pas .
Pour la suite du sujet, on supposera que la fonction de transfert
représentative du compor--
----ÊKËL----==KQ==9ÆîMY1nYS_ËNFÏ
tement de la conduite s'écrit : Hconduioe(p) : F ( )
charges p
II.3 Membrane de la micropompe
Objectif
L'objectif de cette partie est de modéliser le fonctionnement de la membrane de
la
micropompe afin de lier les efforts exercés sur la membrane avec le débit
effectif
de la pompe.
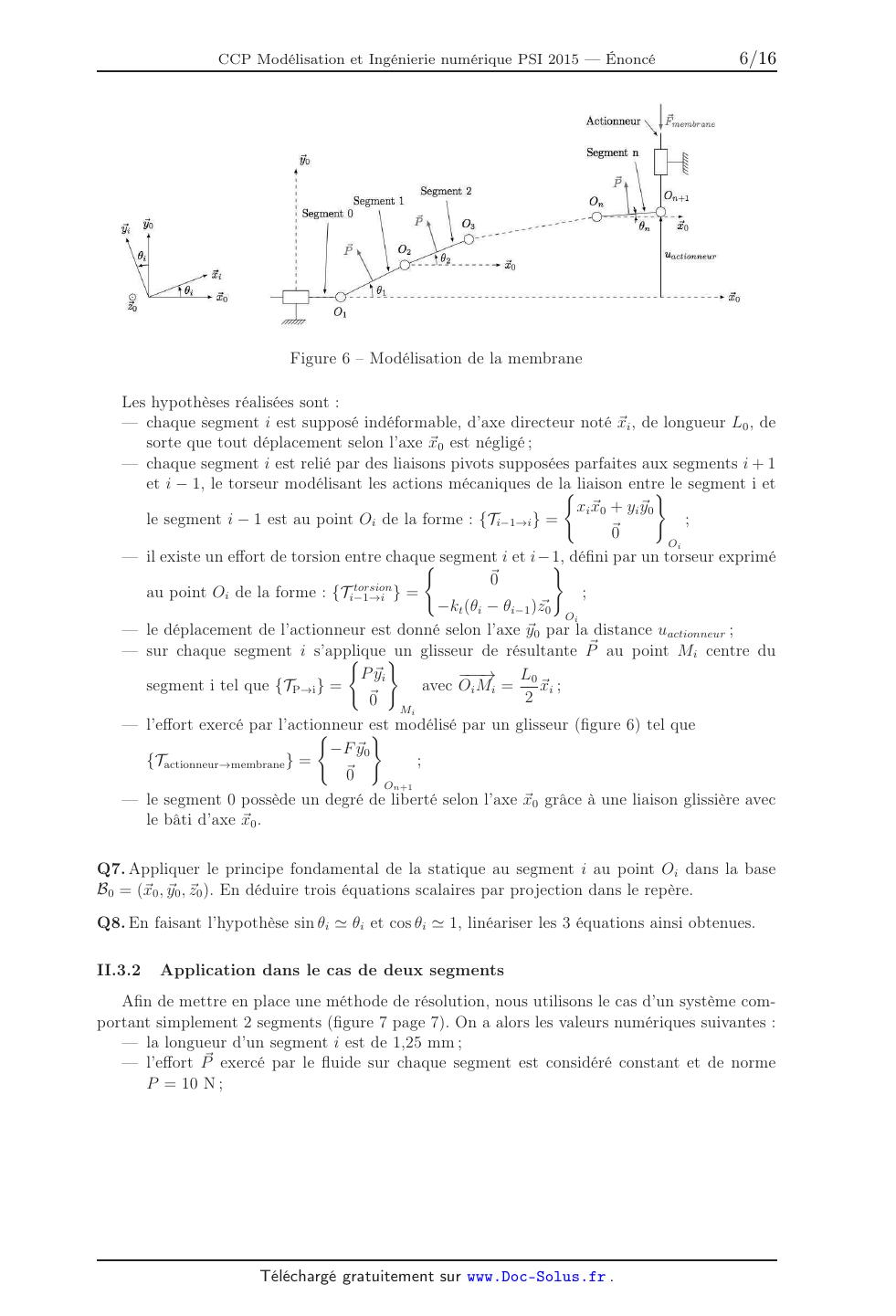
II.3.1 Modélisation générale
Le comportement de la membrane est modélisé par un assemblage de segments
reliés entre
eux par des liaisons pivots comme décrit sur la figure 6 page 6.
5/16
Actionneur \v
Fmembrane
. (, Ê
yo Segmen n
* .
\
: Segment 2 P 0
: Segment 1 Un "+1
\ Segment 0 . » ÿ * .
: P \ 50
' />>_4
3 P "announeur
\
.
WJ,,,ol
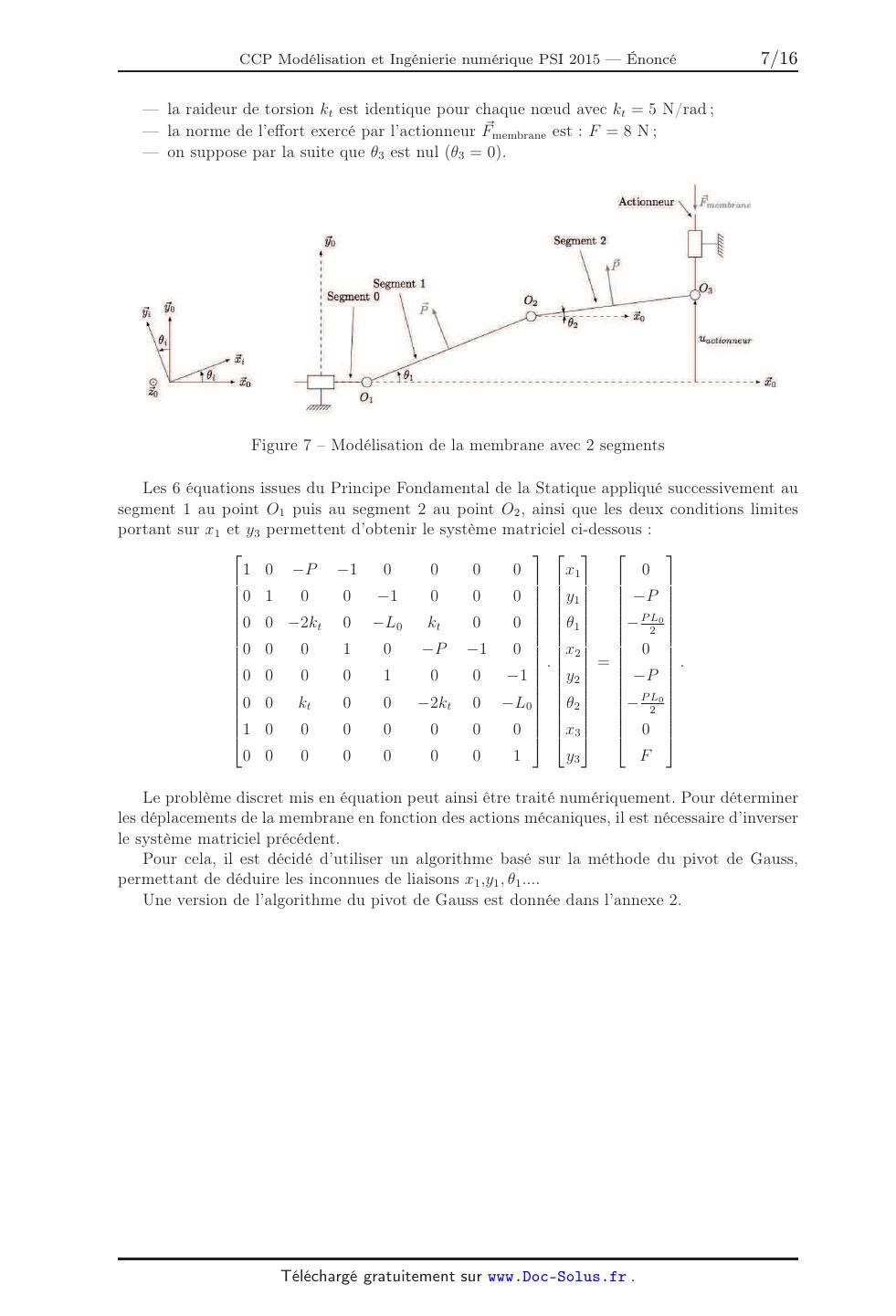
-- la raideur de torsion kt est identique pour chaque noeud avec kt : 5 N / rad;
-- la norme de l'effort exercé par l'actionneur Fmembrane est : F = 8 N;
-- on suppose par la suite que 93 est nul (93 = O).
"actionneur
__________ 50
Figure 7 -- Modélisation de la membrane avec 2 segments
Les 6 équations issues du Principe Fondamental de la Statique appliqué
successivement au
segment 1 au point 01 puis au segment 2 au point 02, ainsi que les deux
conditions limites
portant sur 331 et % permettent d'obtenir le système matriciel ci--dessous :
_1 0 --19 ---1 0 0 ' }n_ _ 0 _
0 1 0 0 ---1 0 y1 _}?
() 0 ---2kt 0 --:L0 kt 0 91 ---£%9
0 () 0 1 0 --19 -1 () æ2 __ 0
0 0 0 0 1 0 () --1 ' y2 _-- --}>
0 0 kt 0 0 --2@ 0 ---L0 (@ --£%l
1 0 0 0 0 0 0 fig 0
_0 0 0 0 0 0 1 _ }Æ_ _ F'_
Le problème discret mis en équation peut ainsi être traité numériquement. Pour
déterminer
les déplacements de la membrane en fonction des actions mécaniques, il est
nécessaire d'inverser
le système matriciel précédent.
Pour cela, il est décidé d'utiliser un algorithme basé sur la méthode du pivot
de Gauss,
permettant de déduire les inconnues de liaisons a:1,y1, &...
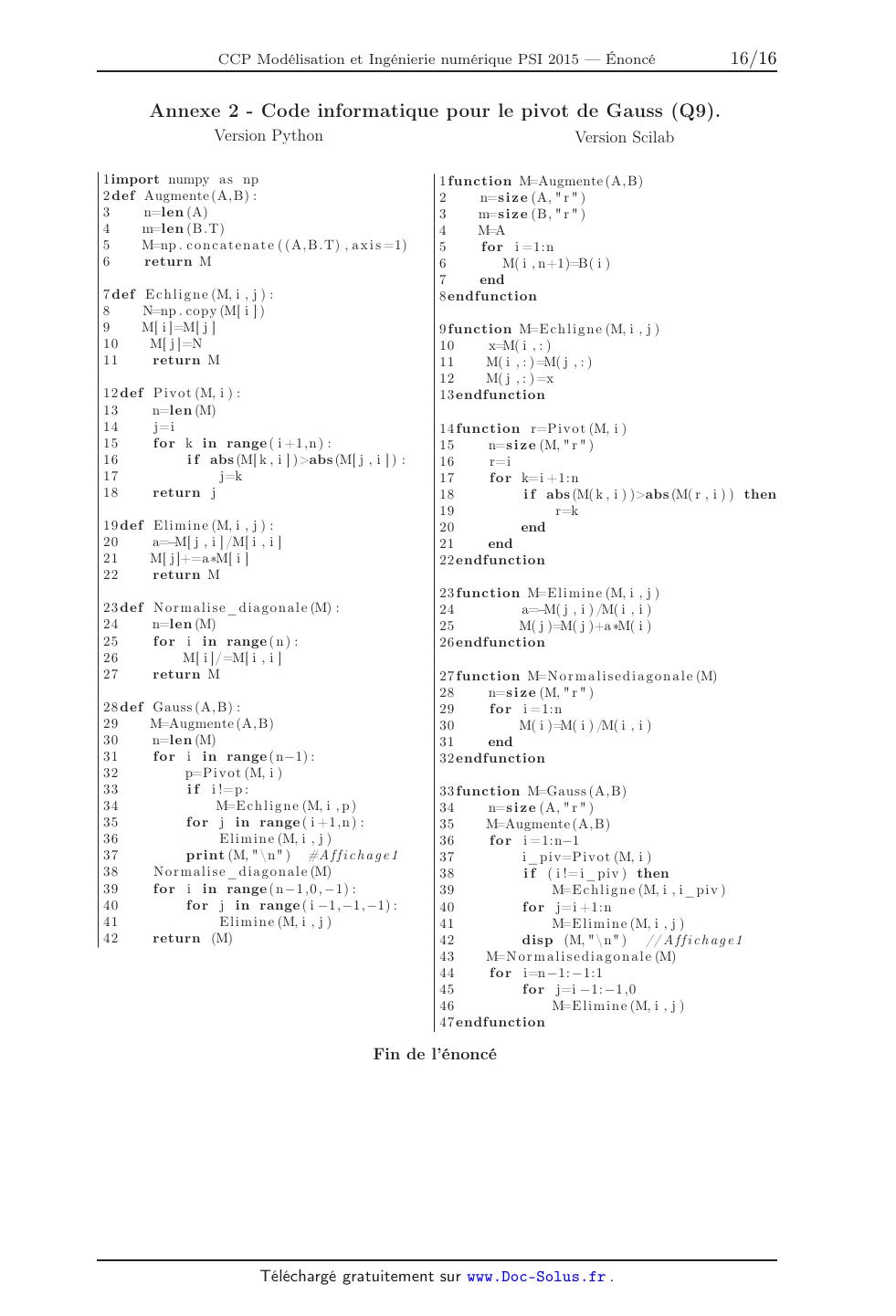
Une version de l'algorithme du pivot de Gauss est donnée dans l'annexe 2.
7/16
On appelle pour la résolution le programme Gauss et on entre la ligne de
commande
sol : Gauss(H,G) avec les matrices [H] et [G] suivantes :
_1 0 ---10 ---1 0 0 0 0 _ _ 0 _
0 1_ 0 0 ---1 0 0 0 --10
0 0 ---10 () --(r00125 5 0 0 --(r00625
ÜÎl== 0 () 0 1 0 --10 ---1 0 KH== 0
0 () 0 0 1 0 0 ---1 ---10
0 0 5 0 0 ---10 () --(r00125 --lL00625
1 () 0 0 0 0 0 0 0
_0 () 0 0 0 0 0 1 _ _ 8 _
Q9. Donner la sortie affichée par la ligne de commande A fichage 1 (ligne 37
pour le code
Python et 42 pour le code Scilab) a la première itération (i=1) .
Remarque : la fonction NP.CONCATENATE(A,B.T), ligne 5 du code python, permet
d'as--
sembler A avec la transposée de B par la droite.
Le résultat donné par l'application du programme est le vecteur solution
suivant :
T T
501=[æ1 gn_ 91 aa y2 65 fig gg] ==[0 ---12 (L000916 () ---2 (L0000833 () 8
Q10. En déduire le déplacement de la membrane noté uactionneur sur la figure 7.
II.3.3 Modélisation dynamique
La modélisation permet de connaitre le comportement statique de la membrane et
donc son
comportement sous charge. Néanmoins, il est nécessaire d'étudier son
comportement dynamique
pour évaluer la fonction de transfert de la membrane. Ainsi, la modélisation
dynamique revient
a écrire le système matriciel suivant :
0 ---J ê1_+ k, --2@ 91 _
--J--nu? --mL2 è2 --aa @ 92
Or, il a été vu a la Q6 que le débit est directement proportionnel a P (via les
pertes de
charge dans la conduite). Ainsi, le système matriciel précédent peut s'écrire
sous la forme :
LFfiaP%
--LF + P%
VHKN-+lBHCÜ+-KËKX==lFl (1)
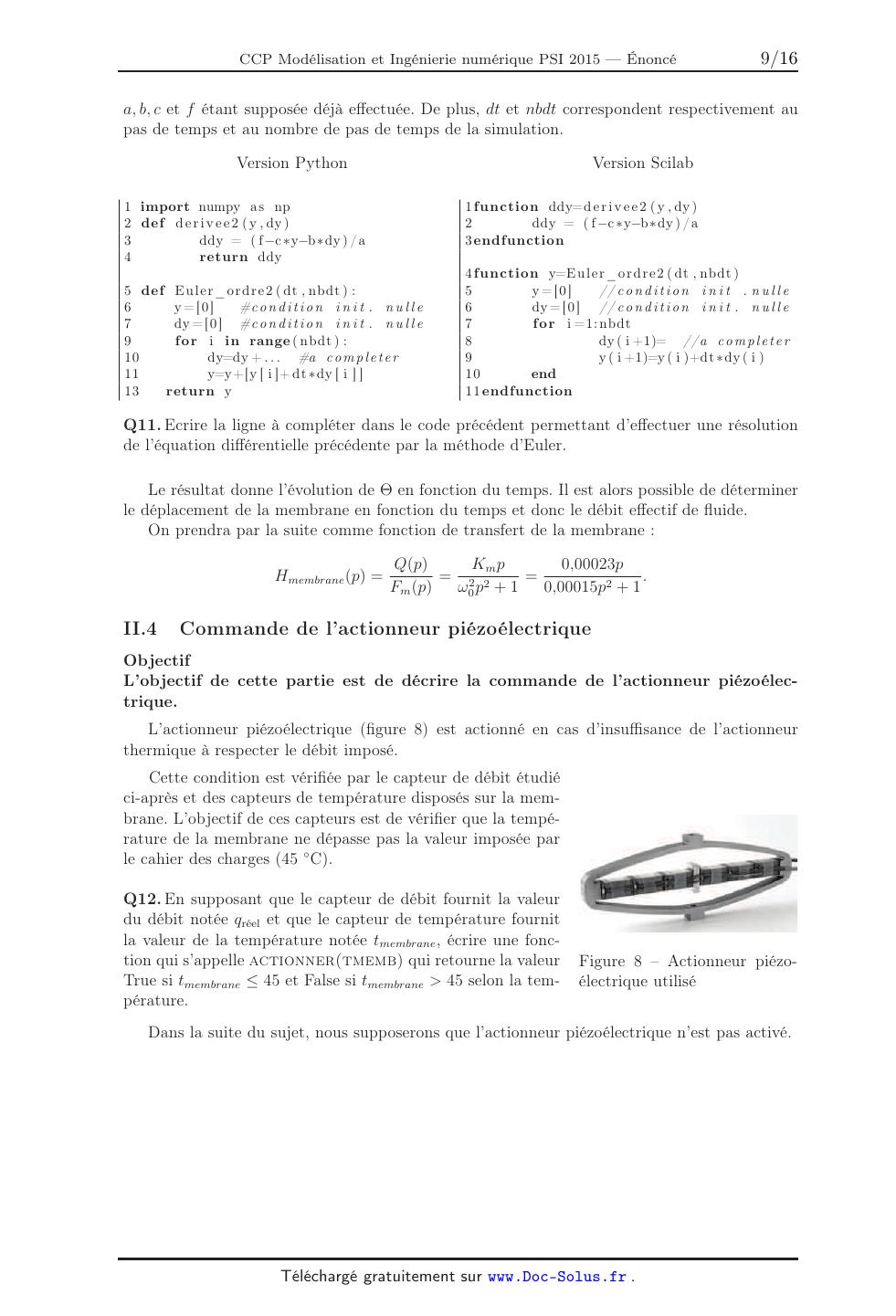
où [O] = [9192] et [F] est une matrice 2 >< 1 exprimée en fonction de F et L. On cherche a résoudre l'équation différentielle (l) a l'aide de la méthode d'Euler a deux pas. Pour simplifier la programmation, nous nous intéressons dans la suite a la résolution d'une équation différentielle d'ordre 2 non matricielle, de la forme : aÿ+bÿ+oy=f où a, b, c et f sont des scalaires et y la solution recherchée. Une partie du programme de résolu-- tion de cette équation par la méthode d'Euler est donnée ci--après, la déclaration des variables 8/16 &, b, c et f étant supposée déjà effectuée. De plus, dt et nbdt correspondent respectivement au pas de temps et au nombre de pas de temps de la simulation. Version Python Version Scilab 1 import numpy as np 1function ddy=derivee2(y,dy) 2 def derivee2(y,dy) 2 ddy : (f--c*y--b*dy)/a 3 ddy : (f--c*y--b*dy)/a 3endfunction 4 return ddy 4function y=Euler_ordre2 (dt ,nbdt) 5 def Euler_ordre2(dt,nbdt): 5 y=[0] //c0nditlon finit .nulle 6 y=[0] #condition finit. nulle 6 dy=[0] //c0nditlon finit. nulle 7 dy=[0] #condition finit. nulle 7 for i=1:nbdt 9 for i in range(nbdt): 8 dy(i+1)= //a completer 10 dy=dy+.... #a. completer 9 y(i+1)=y(i)+dt*dy(i) 11 y=y+[y[i]+dt*dy[i]] 10 end 13 return y 11endfunction Q11. Ecrire la ligne a compléter dans le code précédent permettant d'effectuer une résolution de l'équation différentielle précédente par la méthode d'Euler. Le résultat donne l'évolution de @ en fonction du temps. Il est alors possible de déterminer le déplacement de la membrane en fonction du temps et donc le débit effectif de fluide. On prendra par la suite comme fonction de transfert de la membrane : QQ?) _ Km}? _ 0700023}? F@@)_läfiaai_onduæfl+i' Hmembrane (p) = 11.4 Commande de l'actionneur piézoéIectrique Objectif L'objectif de cette partie est de décrire la commande de l'actionneur piézoé1eo- trique. L'actionneur piézoélectrique (figure 8) est actionné en cas d'insuffisance de l'actionneur thermique a respecter le débit imposé. Cette condition est vérifiée par le capteur de débit étudié ci--après et des capteurs de température disposés sur la mem-- brane. L'objectif de ces capteurs est de vérifier que la tempé-- rature de la membrane ne dépasse pas la valeur imposée par le cahier des charges (45 °C). Q12. En supposant que le capteur de débit fournit la valeur du débit notée qréel et que le capteur de température fournit la valeur de la température notée t...embmne, écrire une fonc-- tion qui s'appelle ACTIONNER(TMEMB) qui retourne la valeur Figure 8 -- Actionneur piézo-- True si t...embmne S 45 et False si t...embmne > 45 selon la tem-- électrique
utilisé
pérature.
Dans la suite du sujet, nous supposerons que l'actionneur piézoélectrique n'est
pas activé.
9/16
II.5 Débitmétre a fil chaud
Objectif
L'objectif de cette partie est de modéliser le fonctionnement du débimétre a fil
chaud utilisé comme capteur de débit dans l'asservissement.
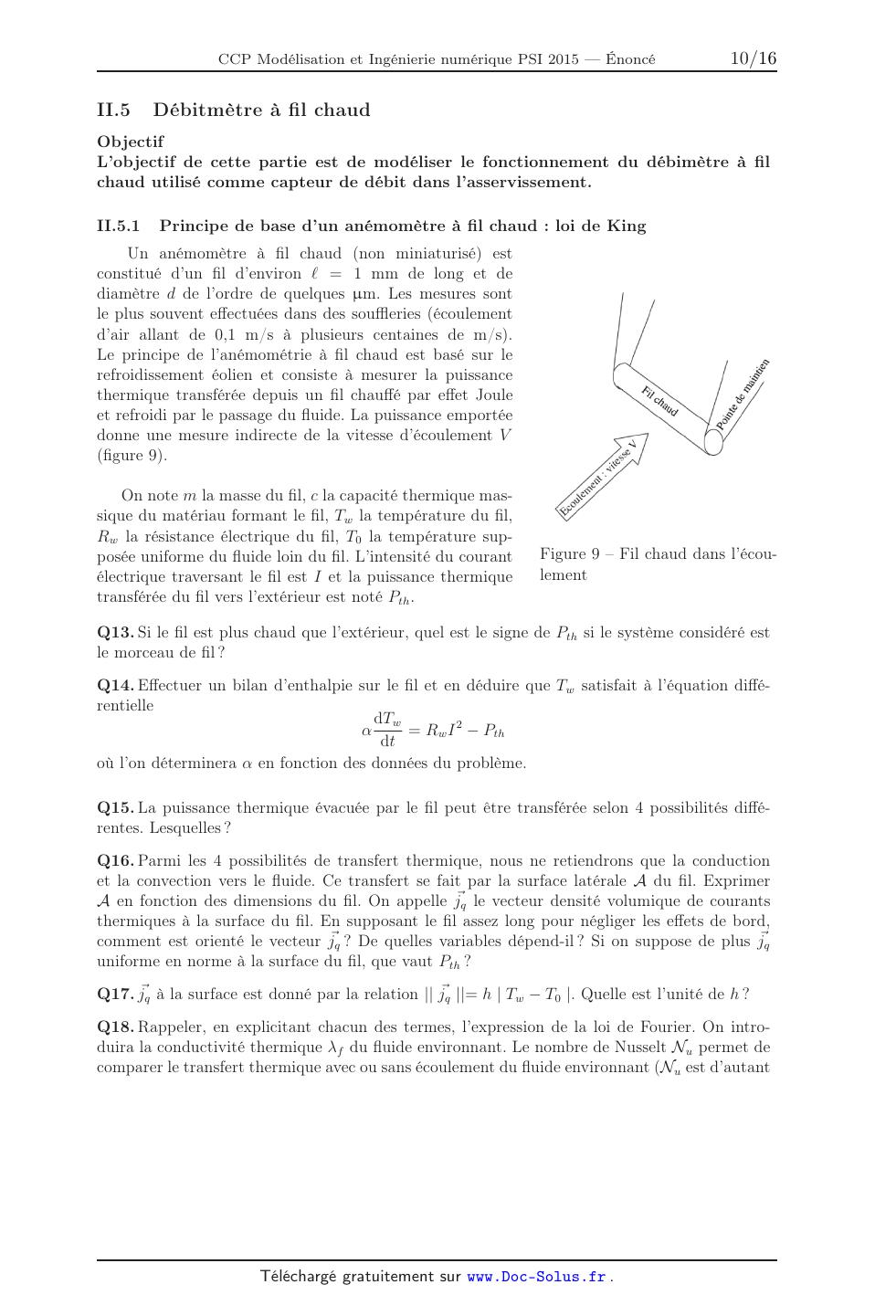
II.5.1 Principe de base d'un anémométre a fil chaud : loi de King
Un anémomètre a fil chaud (non miniaturisé) est
constitué d'un fil d'environ EUR = 1 mm de long et de
diamètre d de l'ordre de quelques mm. Les mesures sont
le plus souvent effectuées dans des souffleries (écoulement
d'air allant de 0,1 m/s a plusieurs centaines de m/s).
Le principe de l'anémométrie a fil chaud est basé sur le
refroidissement éolien et consiste a mesurer la puissance
thermique transférée depuis un fil chauffé par effet Joule
et refroidi par le passage du fluide. La puissance emportée
donne une mesure indirecte de la vitesse d'écoulement V
(figure 9).
On note m la masse du fil, c la capacité thermique mas--
sique du matériau formant le fil, T... la température du fil,
H... la résistance électrique du fil, T 0 la température sup--
posée uniforme du fluide loin du fil. L'intensité du courant Figure 9 -- Fil
Châlld dans 17ëCOU--
électrique traversant le fil est ] et la puissance thermique lement
transférée du fil vers l'extérieur est noté P....
Q13. Si le fil est plus chaud que l'extérieur, quel est le signe de P... si le
système considéré est
le morceau de fil ?
Q14. Effectuer un bilan d'enthalpie sur le fil et en déduire que T... satisfait
a l'équation diffé--
rentielle
dT...
d--t
où l'on déterminera 04 en fonction des données du problème.
=Rw 12-- Pth
Q15. La puissance thermique évacuée par le fil peut être transférée selon 4
possibilités diffé--
rentes. Lesquelles?
Q16. Parmi les 4 possibilités de transfert thermique, nous ne retiendrons que
la conduction
et la convection vers le fluide. Ce transfert se fait par la surface latérale A
du fil. Exprimer
A en fonction des dimensions du fil. On appelle 32 le vecteur densité volumique
de courants
thermiques a la surface du fil. En supposant le fil assez long pour négliger
les effets de bord
comment est orienté le vecteur jq ? De quelles variables dépend-- il? Si on
suppose de plus jq
uniforme en norme a la surface du fil, que vaut PH,? .
Q17 . 32 a la surface est donné par la relation H j--q' "= h \ T... -- T 0 \.
Quelle est l'unité de h ?
Q18. Rappeler, en explicitant chacun des termes, l'expression de la loi de
Fourier. On intro--
duira la conductivité thermique Àf du fluide environnant. Le nombre de Nusselt
N... permet de
comparer le transfert thermique avec ou sans écoulement du fluide environnant
(N... est d'autant
10/16
plus grand que la vitesse V de l'écoulement est grande). On montre que ce
nombre vaut dans
le cas du fil chaud Nu = À--. Vérifier que cette quantité est bien sans
dimension.
f
Q19. Montrer alors qu'en régime permanent, l'équation différentielle obtenue
Q14 se simplifie
en R...]2 : 7TEURÀf(Tw -- TO)Nu.
Q20. Application numérique : le fil chaud dissipe une puissance de 0,25 W. La
conductivité
thermique de l'air est de 0,02 \N-K--1-m_1 et la différence de température est
de l'ordre de 200
°C. Que vaut le nombre Nu ? Que dire du transfert par convection par rapport au
transfert par
conduction ?
Q21.En 1914, King a proposé la loi suivante : Nu : a + b\/Îe où Re est le
nombre de
Reynolds et a et 19 deux coefficients qui ne dépendent pas de la vitesse de
l'écoulement V.
Quelle est l'expression du nombre de Reynolds dans ce problème ? On introduira
le coefficient
de viscosité dynamique du fluide noté 77 et la masse volumique du fluide notée
p. Comment
varie alors Nu avec la vitesse V ?
Le fil chaud est fait d'un matériau dont la résistivité électrique dépend de la
température
de manière affine. La résistance R... du fil s'écrit alors R...(T...) : R0(l +
oz(Tw -- T e)) avec oz une
constante dépendant du matériau.
R...I2
(Rw _ RO)
Àf, oz, R...d,a,b,n et de p.
Q22. Montrer alors que : 611 + [).../V où l'on exprimera 611 et 191 en fonction
de EUR,
II.5.2 Electronique d'asservissement : anémométrîe à température constante (CTA)
On vient de voir que la résistance du fil dépend directement de la vitesse V de
l'écoulement.
L'anémométrie a température constante (CTA) consiste a garder la résistance
R... constante
et donc la température T ... du fil constante. On mesurera donc V a travers les
fluctuations de
l'intensité ] qui traverse le fil chaud.
Q23.La résistance du fil chaud est insérée
dans un circuit type << pont de Wheatstone >>.
Oe circuit comporte deux résistances égales
a R1, une résistance Roe que l'on peut faire
varier et le fil chaud représenté par la résis--
tance R.... En utilisant deux diviseurs de ten--
sion bien choisis, montrer que la tension 6 est
l l
égale à EUR = E (m _ @ OÙ. POD pré--
cisera les expressions de fi et 5 . Quelle est la
condition sur R... et Roe pour que le pont soit
équilibré, c'est--à--dire e = 0 ?
Figure 10 -- Pont de Wheatstone
On peut choisir d'équilibrer le pont (6 = 0) en jouant sur la valeur de 3957 ce
qui va fixer la
température de travail du fil chaud.
11/16
Q24. Si on augmente la valeur de R... est--ce qu'on sélectionne une température
de travail plus
élevée ou plus faible? Dans le cas d'un fluide médicamenteux, pourquoi vaut--il
mieux choisir
R,, de telle façon que la température du fil chaud n'excède pas 100 °C ?
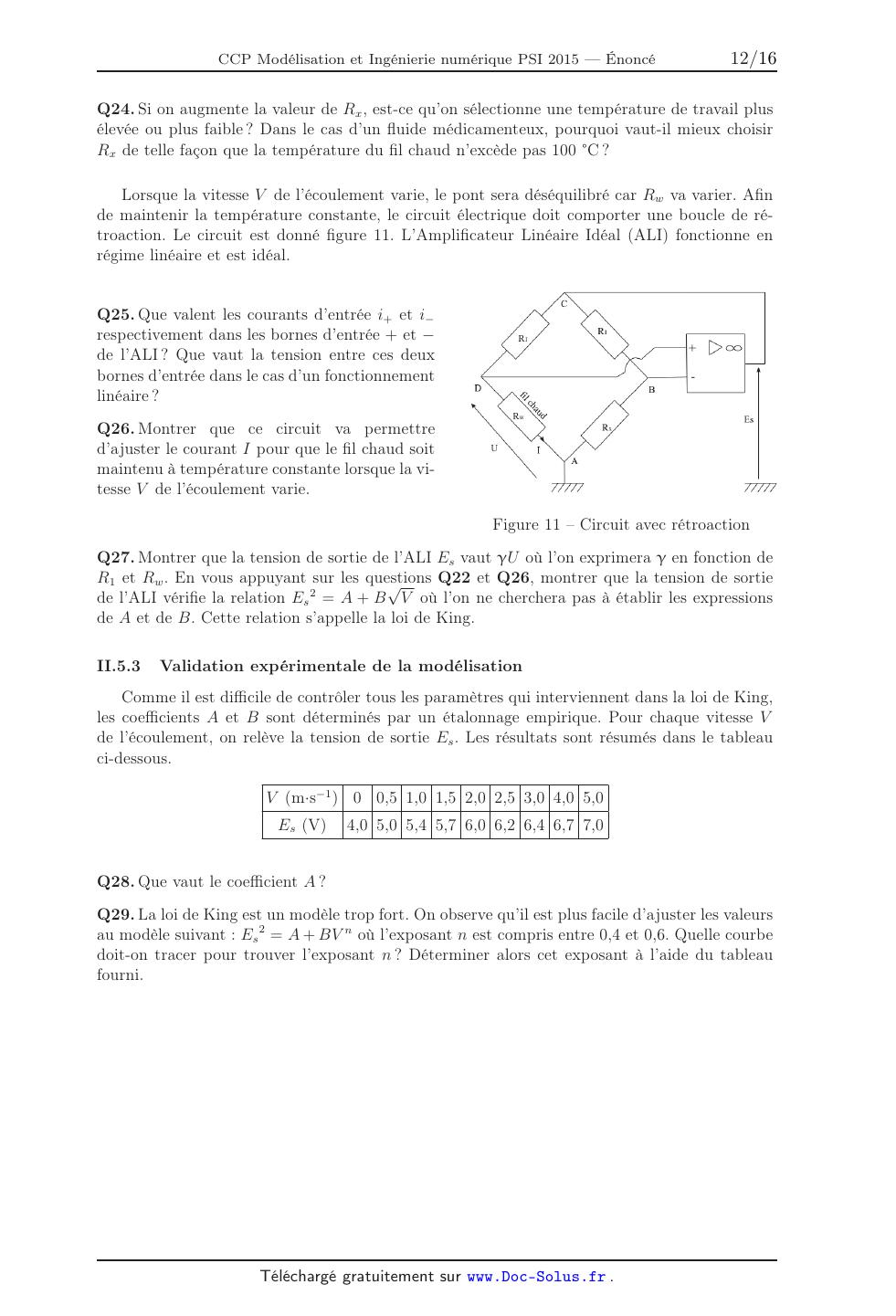
Lorsque la vitesse V de l'écoulement varie, le pont sera déséquilibré car Rw va
varier. Afin
de maintenir la température constante, le circuit électrique doit comporter une
boucle de ré--
troaction. Le circuit est donné figure 11. L'Amplificateur Linéaire Idéal (ALI)
fonctionne en
régime linéaire et est idéal.
Q25. Que valent les courants d'entrée @ et 2'_
respectivement dans les bornes d'entrée + et --
de l'ALI? Que vaut la tension entre ces deux
bornes d'entrée dans le cas d'un fonctionnement
linéaire ?
Q26. Montrer que ce circuit va permettre
d'ajuster le courant I pour que le fil chaud soit
maintenu a température constante lorsque la vi--
tesse V de l'écoulement varie.
Figure 11 -- Circuit avec rétroaction
Q27 . Montrer que la tension de sortie de l'ALI ES vaut yU où l'on exprimera y
en fonction de
R1 et RU,. En vous appuyant sur les questions Q22 et Q26, montrer que la
tension de sortie
de l'ALI vérifie la relation E32 : A + B \/V où l'on ne cherchera pas a établir
les expressions
de A et de B. Cette relation s'appelle la loi de King.
II.5.3 Validation expérimentale de la modélisation
Comme il est difficile de contrôler tous les paramètres qui interviennent dans
la loi de King,
les coefficients A et B sont déterminés par un étalonnage empirique. Pour
chaque vitesse V
de l'écoulement, on relève la tension de sortie E,. Les résultats sont résumés
dans le tableau
ci--dessous.
V'@ns--1) 0 (L5 Le L5 2£>2Æ33l)4Æ)5fl)
_ES(V) {ro ao a4 5J'ôp 62 6A.6J'7n
Q28. Que vaut le coefficient A ?
Q29. La loi de King est un modèle trop fort. On observe qu'il est plus facile
d'ajuster les valeurs
au modèle suivant : E32 : A + BV" où l'exposant n est compris entre 0,4 et 0,6.
Quelle courbe
doit--on tracer pour trouver l'exposant n? Déterminer alors cet exposant a
l'aide du tableau
fourni.
12/16
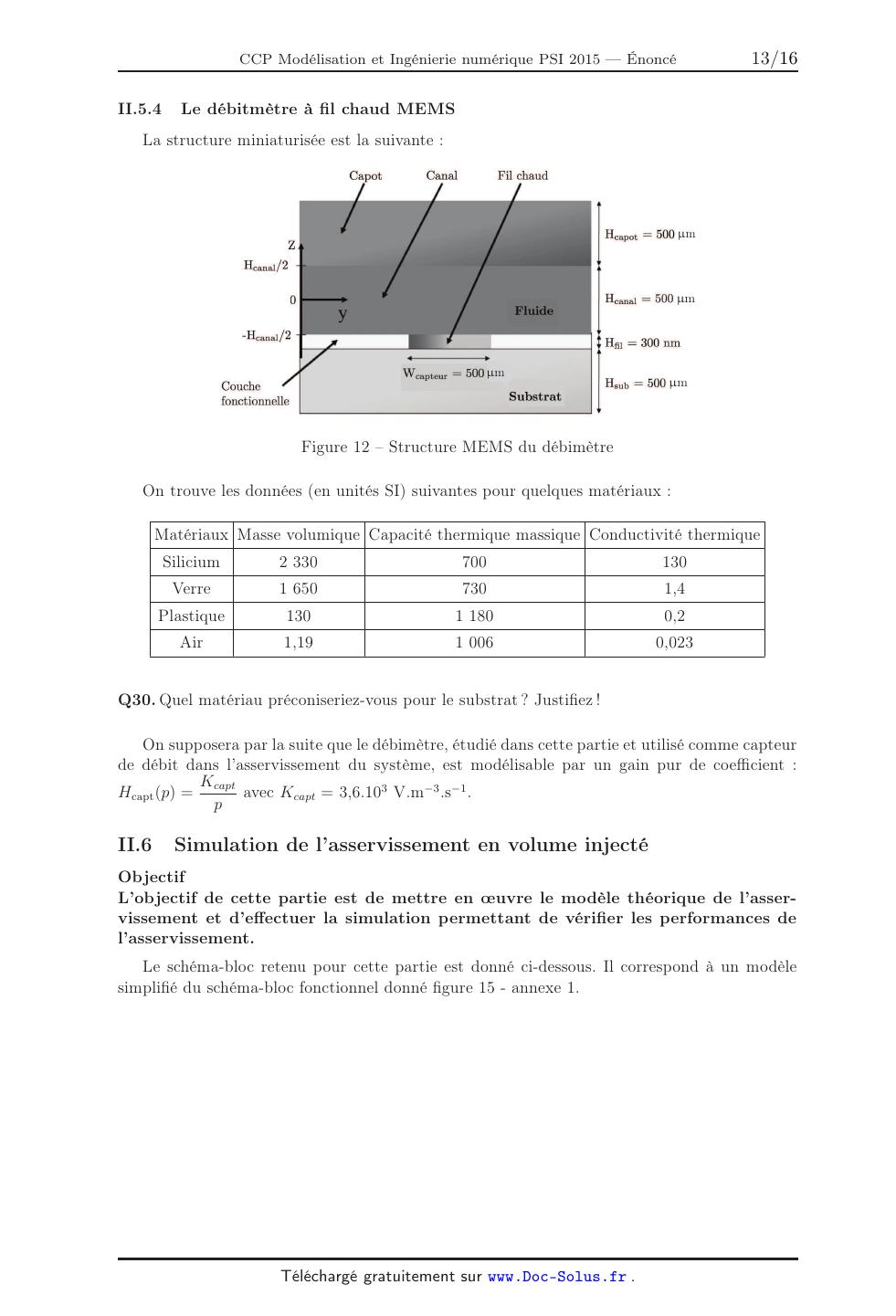
II.5.4 Le débitmètre a fil chaud MEMS
La structure miniaturisée est la suivante :
Capot Canal Fil chaud
Hcap0t : 500 Hm
Z
I'Icanal/2
0 Hcanal : 500 Nm
--H°...1/2 _ I '" H... = 300 nm
«" '"""""""*
W = 500 m
Couche / oepæur H Hsub : 500 nm
fonctionnelle Substrat
Figure 12 -- Structure MEMS du débimètre
On trouve les données (en unités SI) suivantes pour quelques matériaux :
Matériaux Masse volumique Capacité thermique massique Conductivité thermique
Silicium 2 330 700 130
Verre 1 650 730 1,4
Plastique 130 1 180 0,2
Air 1,19 1 006 0,023
Q30. Quel matériau préconiseriez--vous pour le substrat ? J ustifiez!
On supposera par la suite que le débimètre, étudié dans cette partie et utilisé
comme capteur
de débit dans l'asservissement du système, est modélisable par un gain pur de
coefficient :
KCCL
Heapt(p) : Tpt avec Kcapt = 3,6103 V.m_3.s_1.
11.6 Simulation de l'asservissement en volume injecté
Objectif
L'objectif de cette partie est de mettre en oeuvre le modèle théorique de
Passer-
vissement et d'effectuer la simulation permettant de vérifier les performances
de
l'asservissement.
Le schéma--bloc retenu pour cette partie est donné ci--dessous. Il correspond a
un modèle
simplifié du schéma--bloc fonctionnel donné figure 15 -- annexe 1.
13/16
Fchar es p
g ( ) Kd {
Voens(p) Uc(p) AU(p) Uth(p) K... Fth(p) Fm(p) K...p @@ vréel(p)
Kcapt ®--'Hcorr(p) > 1+Tthp -->®--> % > 1/1) _}
Ucapt(p)
Kcapt
p _
Figure 13 -- Schéma--bloc fonctionnel simulé
On suppose tout d'abord que le correcteur 1 (figure 15 -- annexe 1) est un gain
pur de la
fOÏIÏ1EUR Hcorr (p) : Kcorr-
Vi"éel (p )
Q31. Déterminer la fonction de transfert de l'asservissement du volume délivré
H (p) : --().
COHS p
Q32. Le système est--il précis pour une entrée de type échelon de volume ?
Justifier.
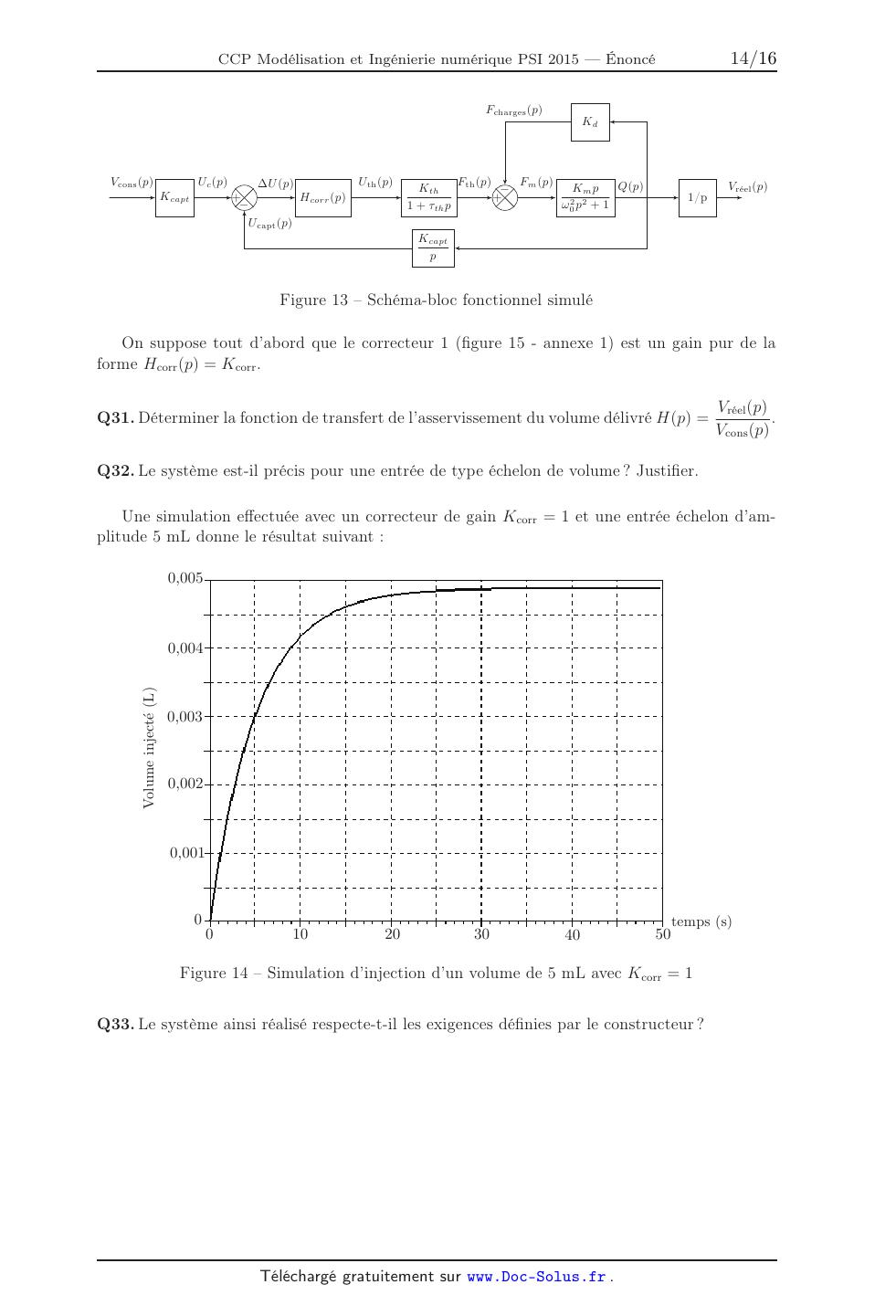
Une simulation effectuée avec un correcteur de gain KC... : 1 et une entrée
échelon d'am--
plitude 5 mL donne le résultat suivant :
07005 . . . . .
| | | | | ' '
| | | | | | | |
| | | | | | | |
...... '-----J--- _L_____L____J_____l_____L_____L____J_____.
| | | | | | | |
| | | | | | | |
| | | | | | |
| | | | | | | |
_| T _____ |__--___| _____ T _____ r _____ l _____ _| ______
| | | | | | | |
| | | | | | | |
| | | | | | | |
-| + ----- |--------| ----- + ----- |-- ----- | ----- -| ------------
A | | | | | | | |
Q | | | | | | | |
V | | | | | | | |
\@ J L _____ L-----_| _____ J. _____ L _____ | _____ J ......
4.7 | | | | | | | |
U | | | | | | | |
a | | | | | | | |
| | | | | | | |
-E _| T _____ |__--___| _____ T _____ r _____ l _____ _| ______
@ | | | | | | | |
| | | | | | | |
5 | | | | | | | |
E -| -|-- ---------- |------------| ---------- + ---------- |- ---------- |
---------- -| ------------
O | | | | | | | |
> : : : : : : : :
J L _____ L-----_| _____ J. _____ L _____ | _____ J ......
| | | | | | | |
| | | | | | | |
| | | | | | | |
| | | | | | | |
___--___________l_ _____ | ______ | ___--__| _____ |-- _____ |___--__| ______
| | | | | | |
| | | | | | |
| | | | | | |
1-- ---------- |------------| ---------- + ---------- |-- ---------- |
---------- -| ------------
| | | | | | |
| | | | | | |
| | | | | | |
| -i- | -i-- i i i temps(s)
0 10 20 30 40
Figure 14 -- Simulation d'injection d'un volume de 5 mL avec Kcorr : 1
Q33. Le système ainsi réalisé respecte--t--il les exigences définies par le
constructeur ?
14/16
Pression artérielle
upiézo (Ü) F piézo (75)
Correcteur2
Act. piézo î
l/cons (t) uc (t) AU(Ë) uth (t) Fth (t)
Act. thermique -->®-->
Capteur débit
V
V
V
Correcteurl
V
Convertisseur -->
A
Figure 15 -- Schéma--bloc fonctionnel simplifié
91/91
On retrouve ainsi sur ce schéma--bloc fonctionnel les grandeurs :
-- Voens(t) le volume de la solution a injecter;
-- Voeel(t) le volume réel déjà injecté de la solution;
-- uc(t) la tension consigne proportionnelle au volume a injecter;
-- upiézo et u... les tensions de commande après correction envoyées aux
actionneurs piézoéle«
-- F..., Fpiézo; Fcharges les actions mécaniques exercées sur la membrane par
respectivement 17
l'actionneur piézoélectrique et la pression de la solution injectée créée par
les pertes de cl
et la pression artérielle;
-- q(t) le débit de solution;
-- ue(t) la tension image du volume de solution injecté.
Annexe 2 -- Code informatique pour le pivot de Gauss (Q9).
Version Python Version Soilab
1import numpy as np 1function M:Augmente(A,B)
2def Augmente(A,B) : 2 n=size (A, "r ")
3 n=len(A) 3 m=size(B, "r")
4 m=len(B.T) 4 MzA
5 OEnp.concatenate((A,B.T) ,axis=1) 5 for i=1:n
6 return M 6 M(i ,n+1)=B( i)
7 end
7de Echligne (M, 1 ,J ) : 8endfunction
8 N=np . copy (M[ i ] )
9 M[ i]=M[J] 9function MzEChligne (M, i ,J )
10 M[J]=N 10 X1M(i ,:)
11 returnM 11 M(i,:)zM(j,:)
12 M(J ,:)=X
12def Pivot (M, 1) : 13endfunction
13 n=len(M)
14 J=i 14function r=Pivot (M, i)
15 for k in range(i+1,n): 15 n:size(M,"r")
16 if abs(M[k,i])>abs(M[J,i]): 16 r=i
17 J=k 17 for k=i+1:n
18 return J 18 if abs (M(k, i) )>abs (M(r , i ) ) then
19 r=k
19def Elimine (M, i ,J ) : 20 end
20 a=--M[J,i]/M[i,i] 21 end
21 M[j]+=a*M[ i ] 22endfunction
22 return M
23function MzElimine (M, i ,J )
23def Normalise_diagonale(M) : 24 a=--M(J , i)1/M( ,i)
24 n=len (M) 25 M(J )1M(J )+a*M( 1)
25 for i in range(n) : 26endfunction
26 M[i]/=M[i,i]
27 return M 27function M:Normalisediagonale(M)
28 n=size (M, "r")
28def Gauss(A,B): 29 for i=1:n
29 M:Augmente(A,B) 30 M(i)zM(i)/M(i , i)
30 n=len (M) 31 end
31 for i in range(n--1)z 32endfunction
32 p=Pivot (M, i)
33 if iÏ=pî 33function MzGE...SS(A,B)
34 MzEChligne(M p) 34 n=size(A,"r")
35 for J in range(i+ll, H): 35 M:Augmente(A,B)
36 Elimine(M, i, J) 36 for i=1:n--1
37 print (M, "\n") #Affichage] 37 i_piv=Pivot (M, 1)
38 Normalise_diagonale(M) 38 if (i!=i_piv) then
39 for i in range(n--1,0,--l)z 39 MzEChligne(M,i ,i_piv)
40 for J in range(i--1,--1,--l): 40 for J=i+1zn
41 Elimine (M, i ,J ) 41 MzElimine (M, i ,J )
42 return (M) 42 disp (M, "\n") //Affichage]
43 M:Normalisediagonale(M)
44 for i=n--1:--1:1
45 for J=i --1:--1,0
46 MzElimine (M, i ,J )
47endfunction
Fin de l'énoncé
16/16
IMPRIMERIE NATIONALE -- 151321 -- D'aprèsdocumentsfournis