
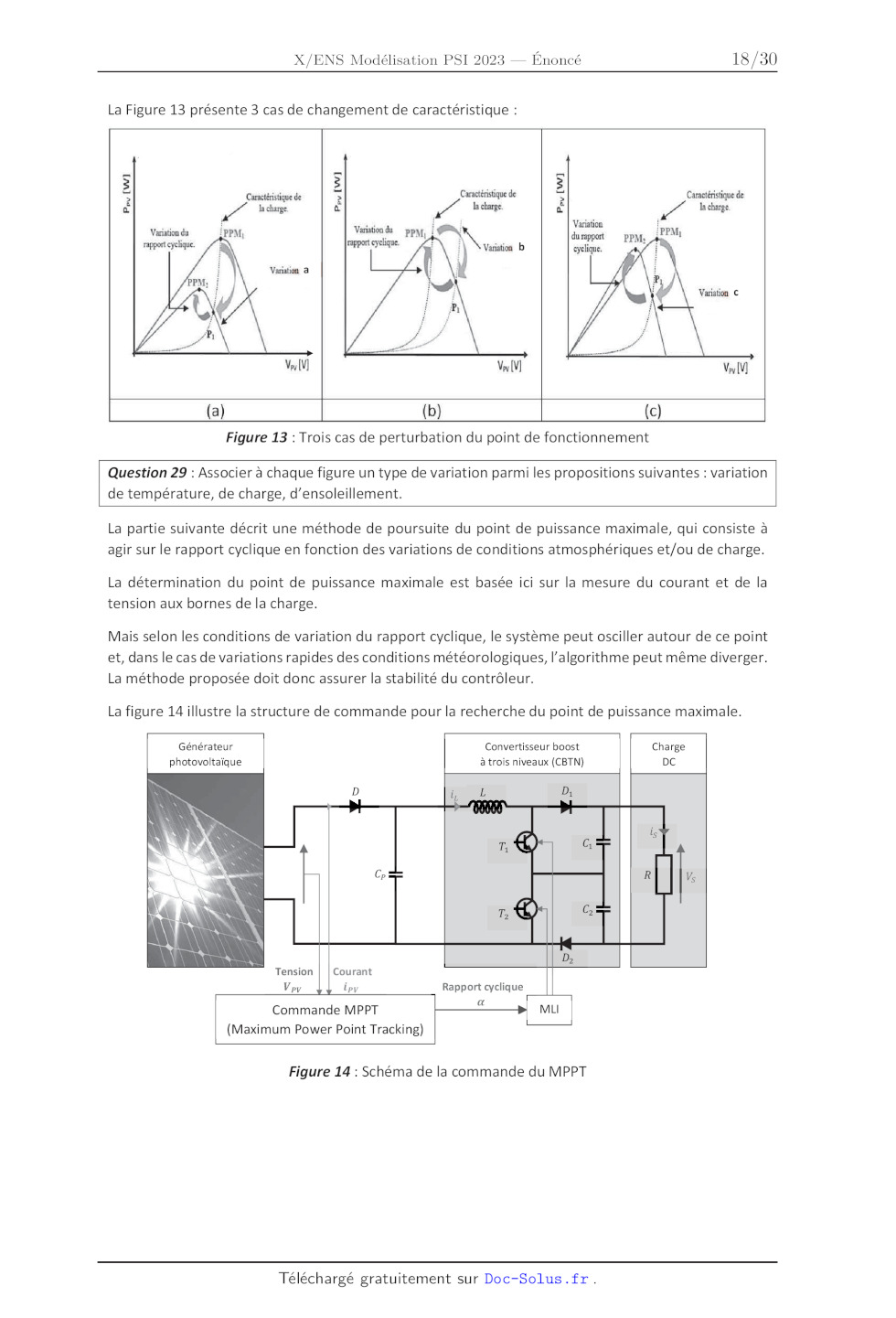
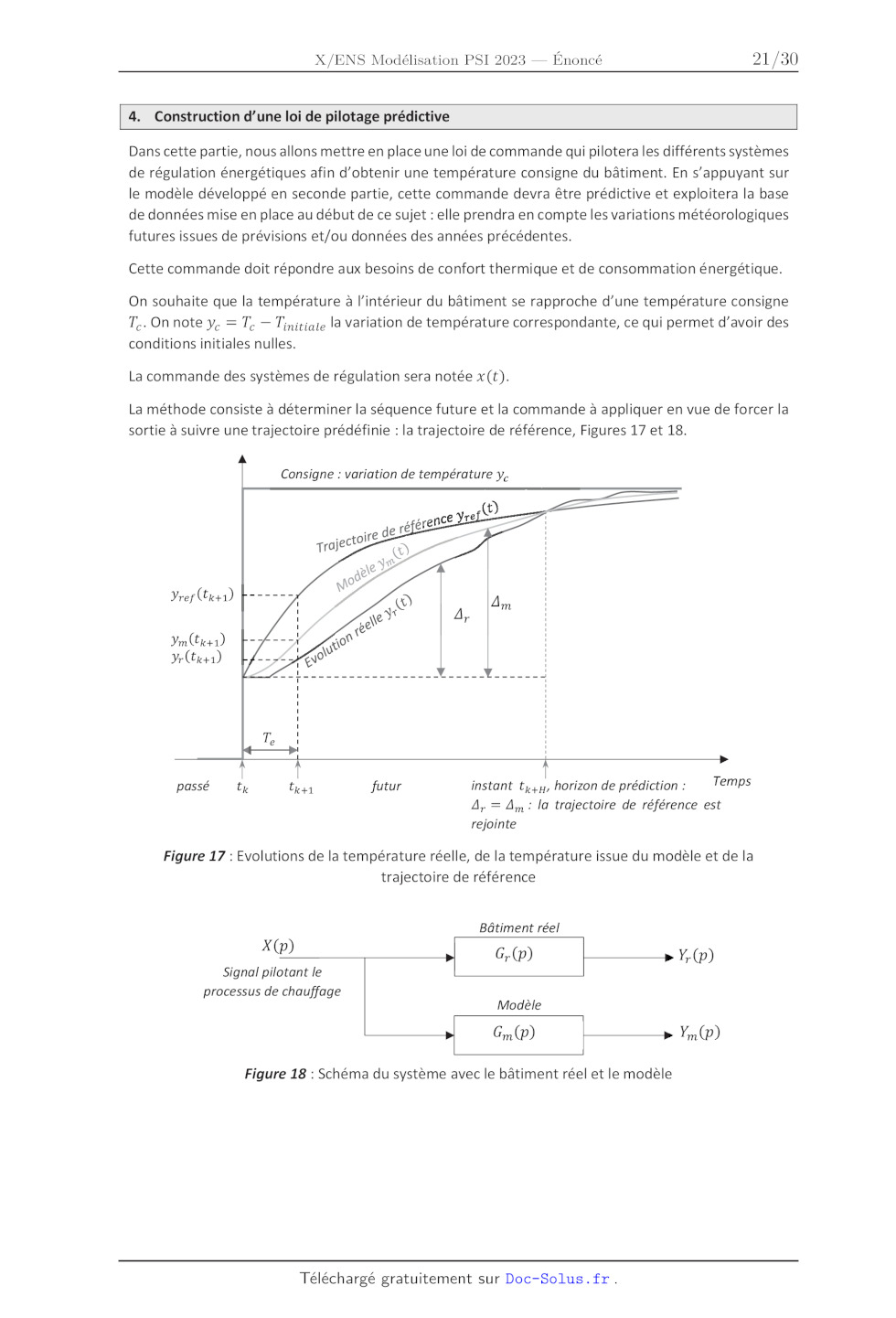
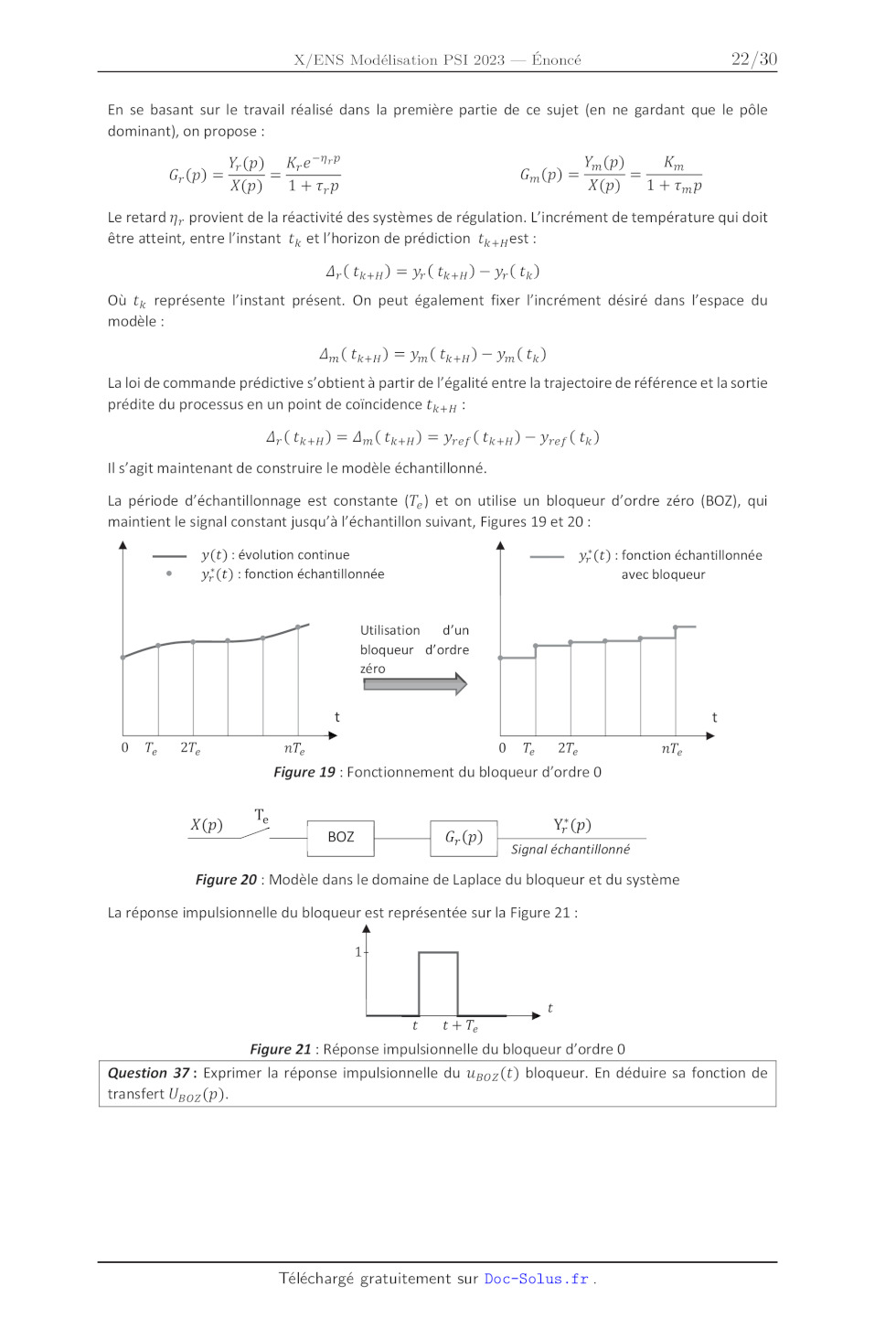
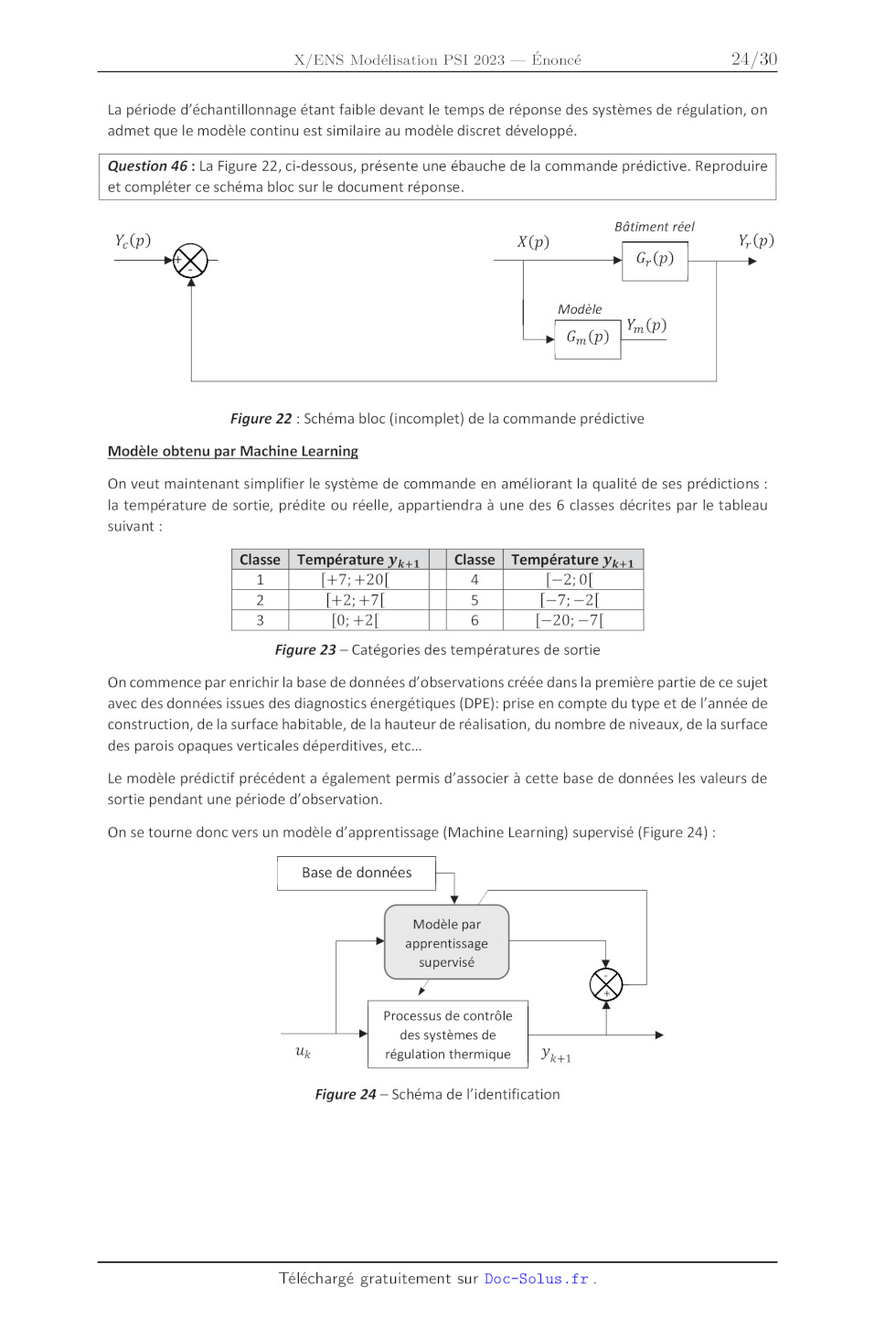
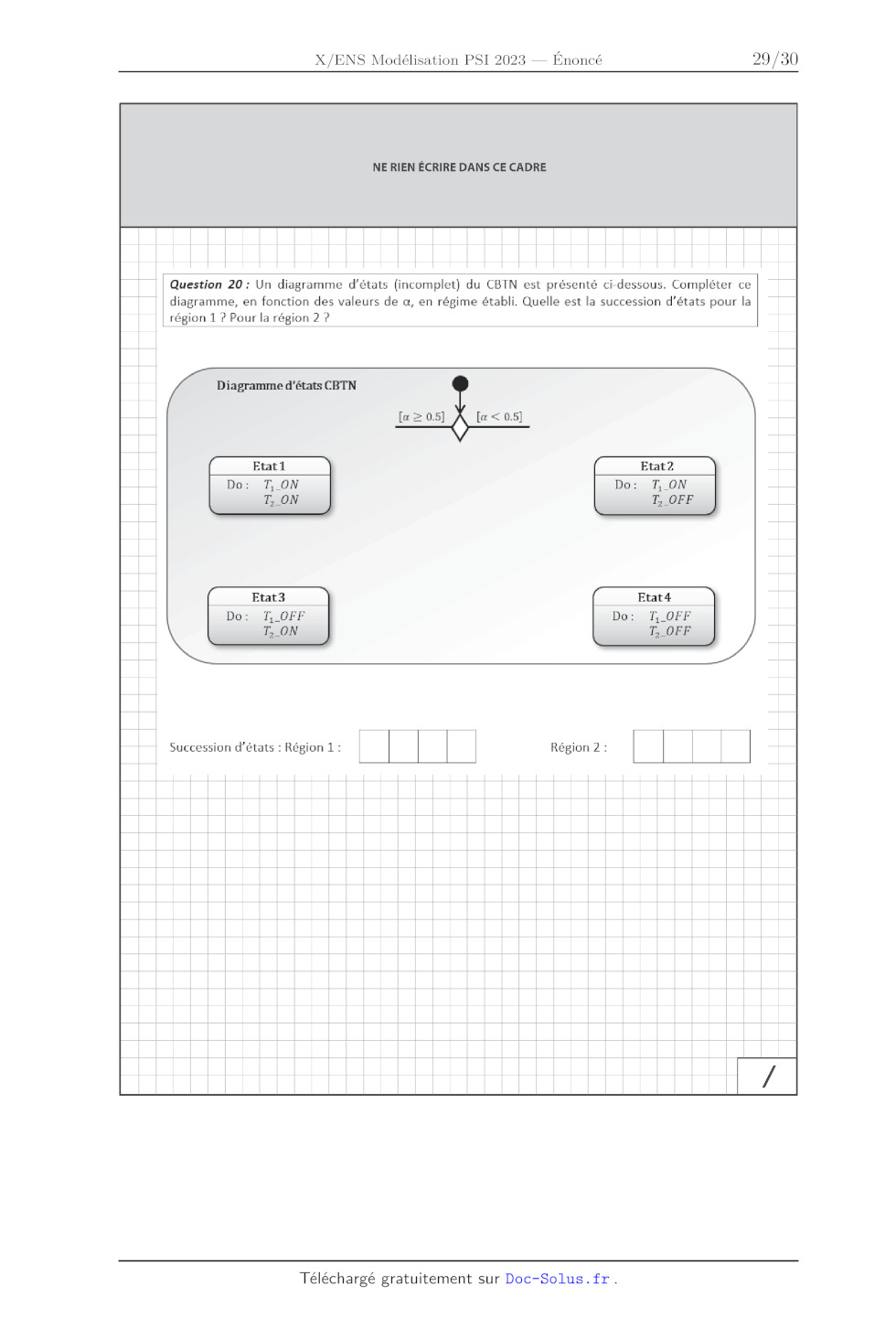
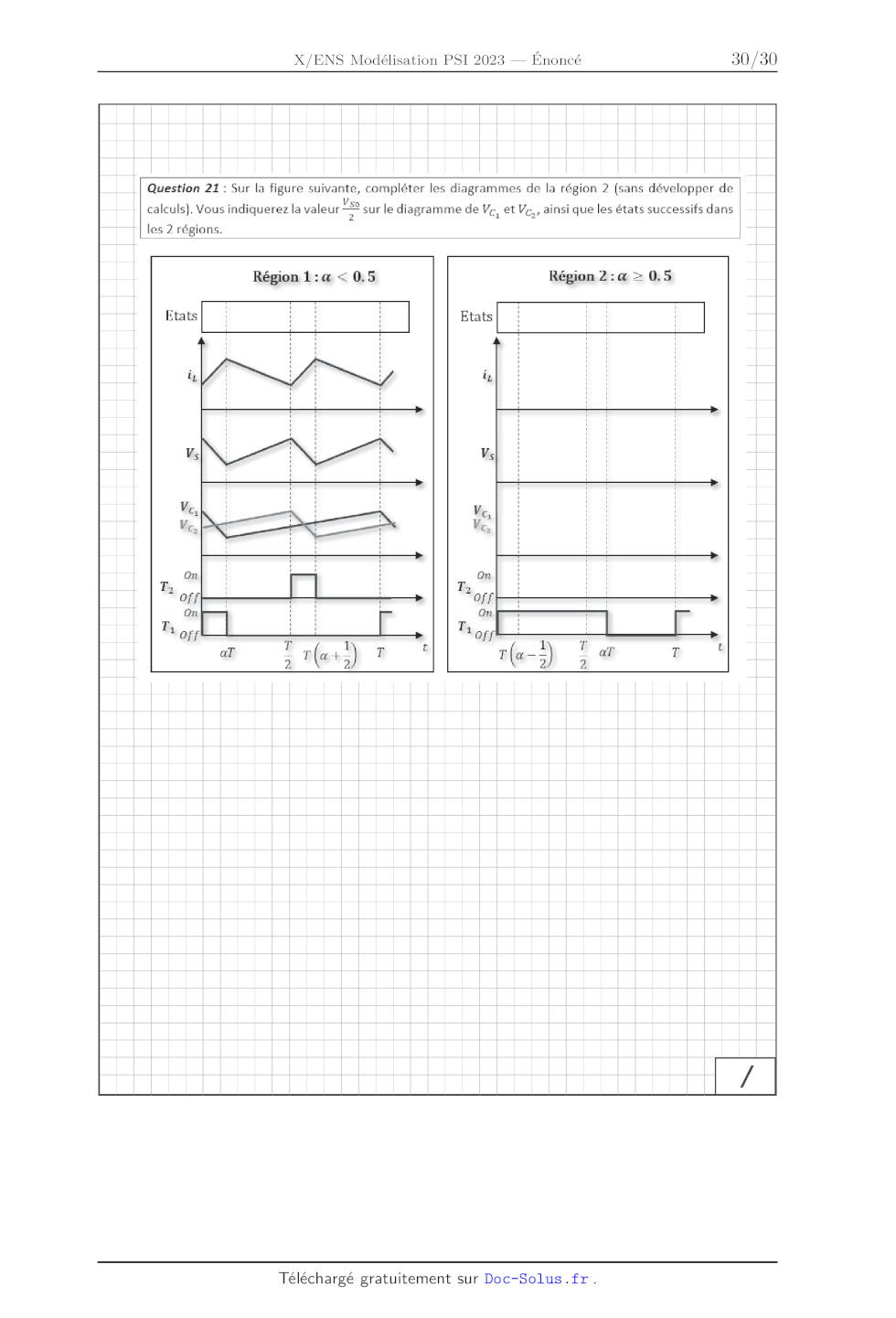
X/ENS Modélisation PSI 2023
| Thème de l'épreuve | Modélisation d'un éco-bâtiment |
| Principaux outils utilisés | base de données, langage SQL, électrocinétique, asservissement, stabilité, hacheur, schéma numérique, méthode d'Euler, machine learning |
| Mots clefs | SQL, écobâtiment |
Corrigé
: 👈 gratuite pour tous les corrigés si tu crées un compte👈 l'accès aux indications de tous les corrigés ne coûte que 5 € ⬅ clique ici
👈 gratuite pour tous les corrigés si tu crées un compte
- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
Énoncé complet
(télécharger le PDF)




Rapport du jury
(télécharger le PDF)
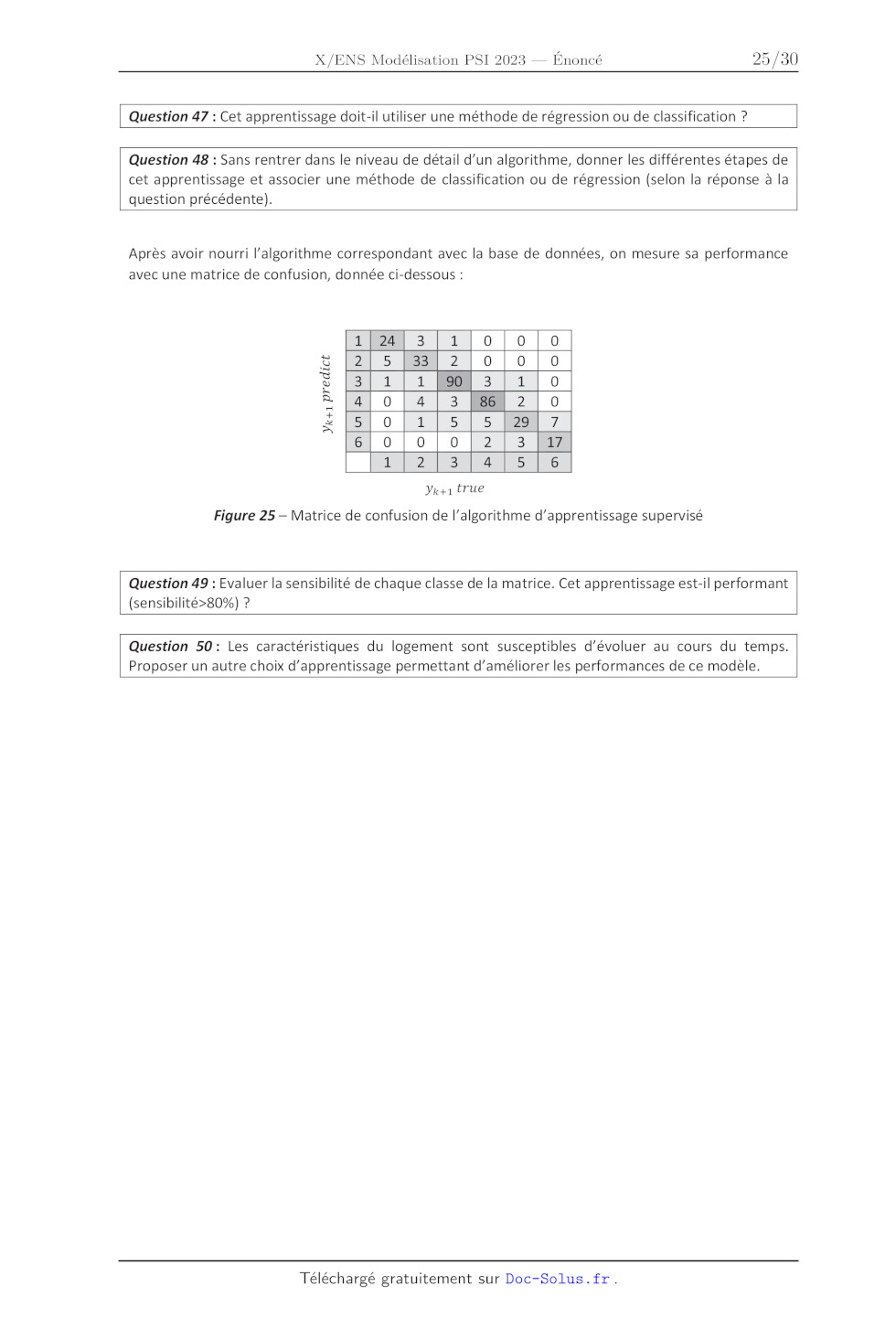
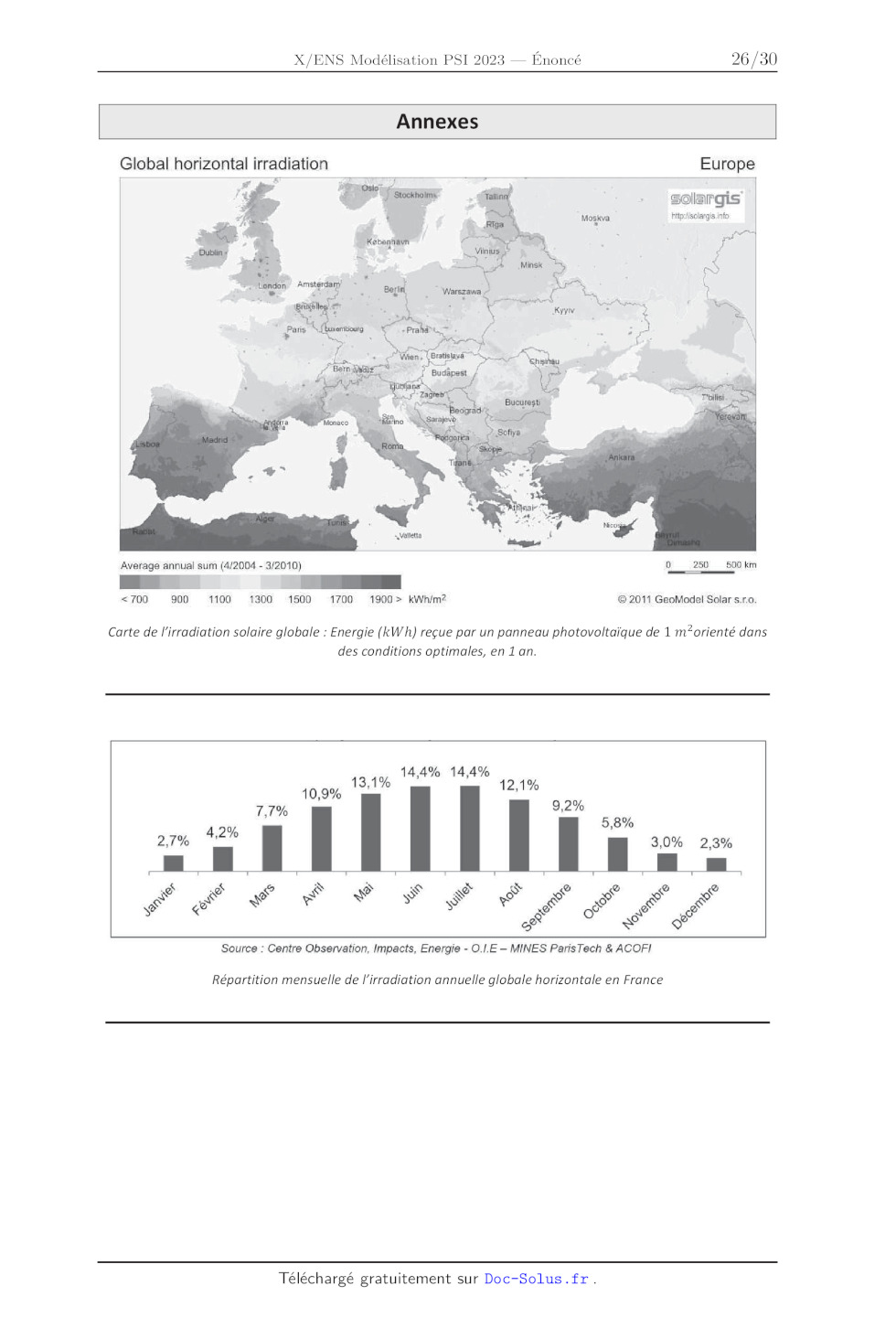
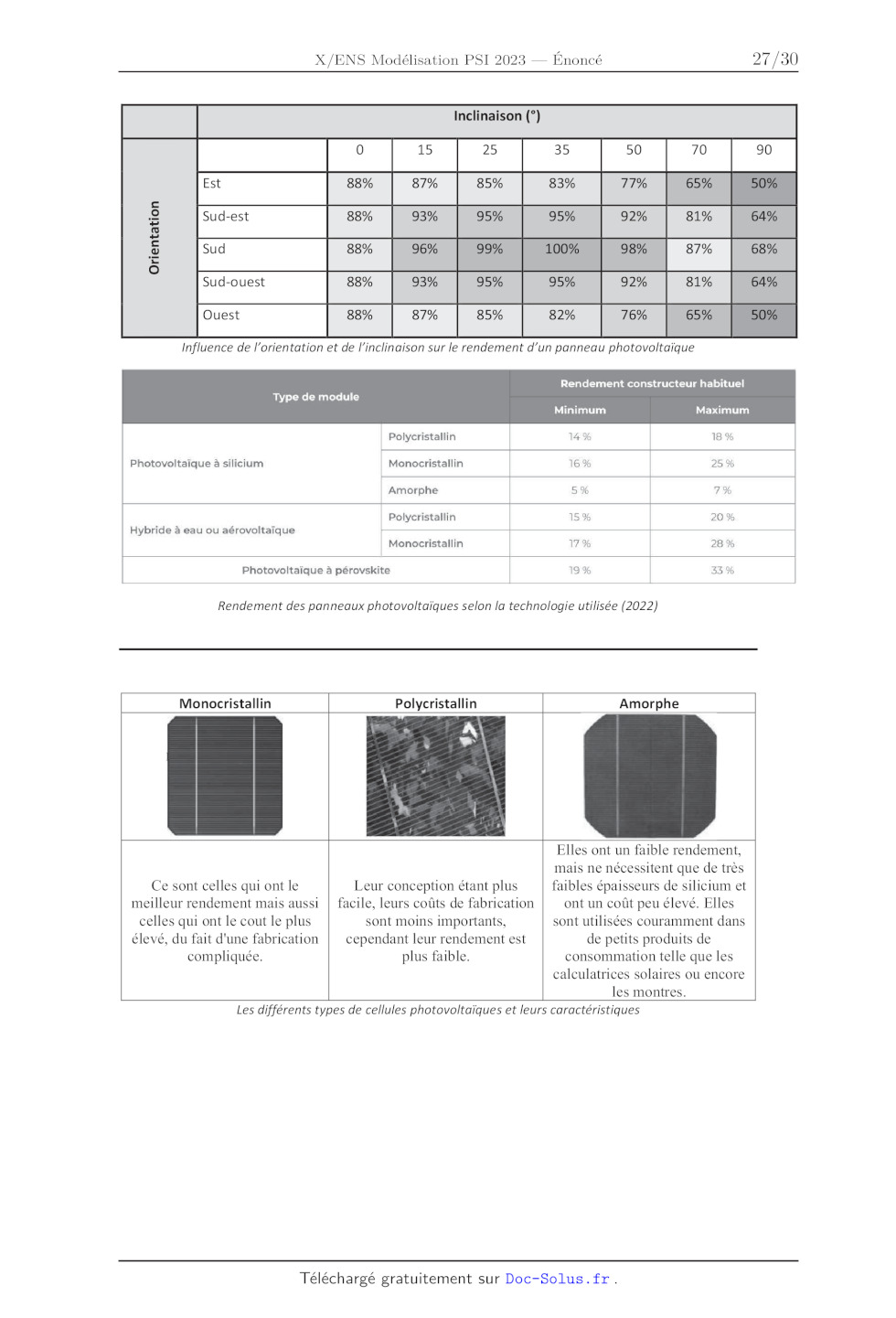
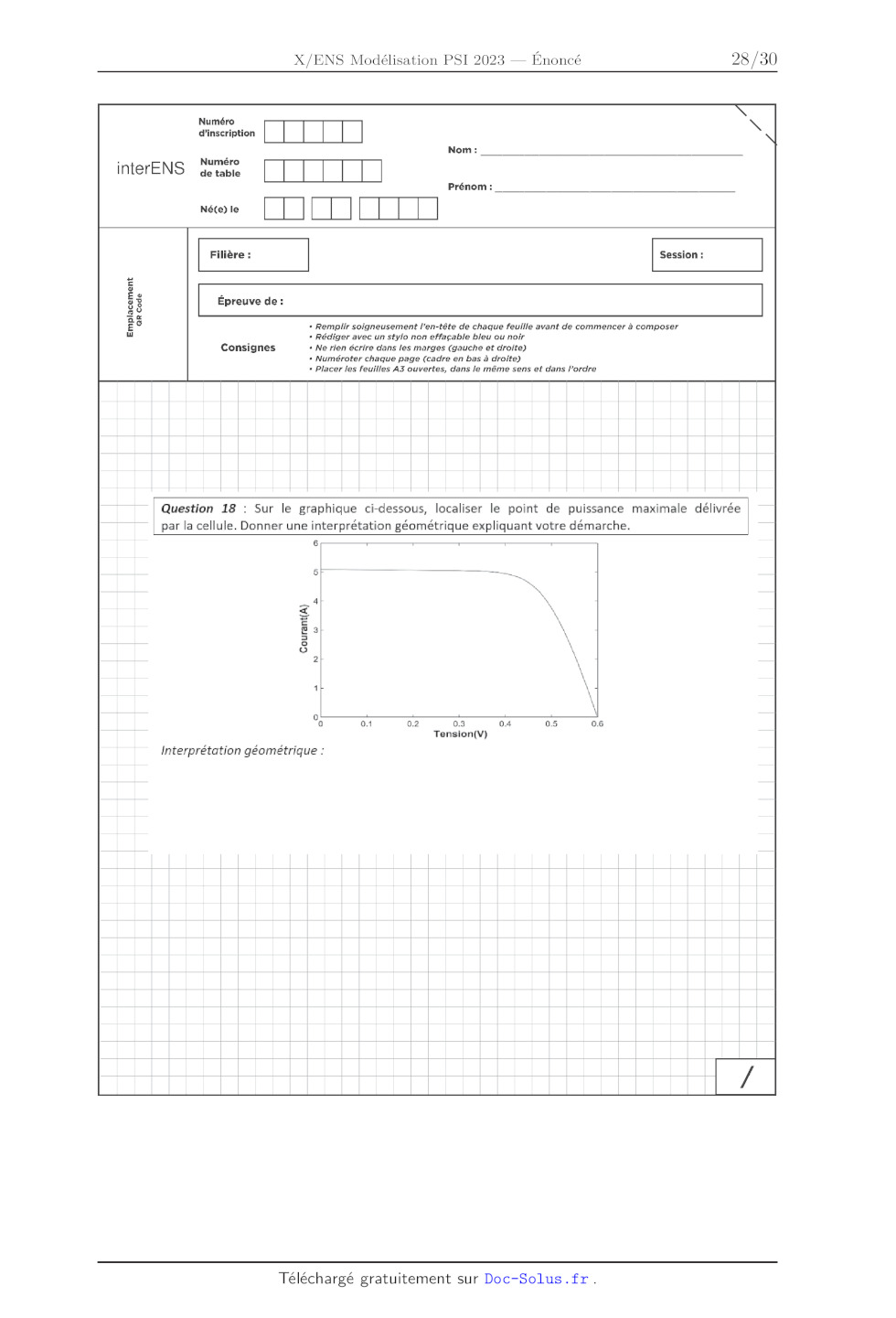
Énoncé obtenu par reconnaissance optique des caractères
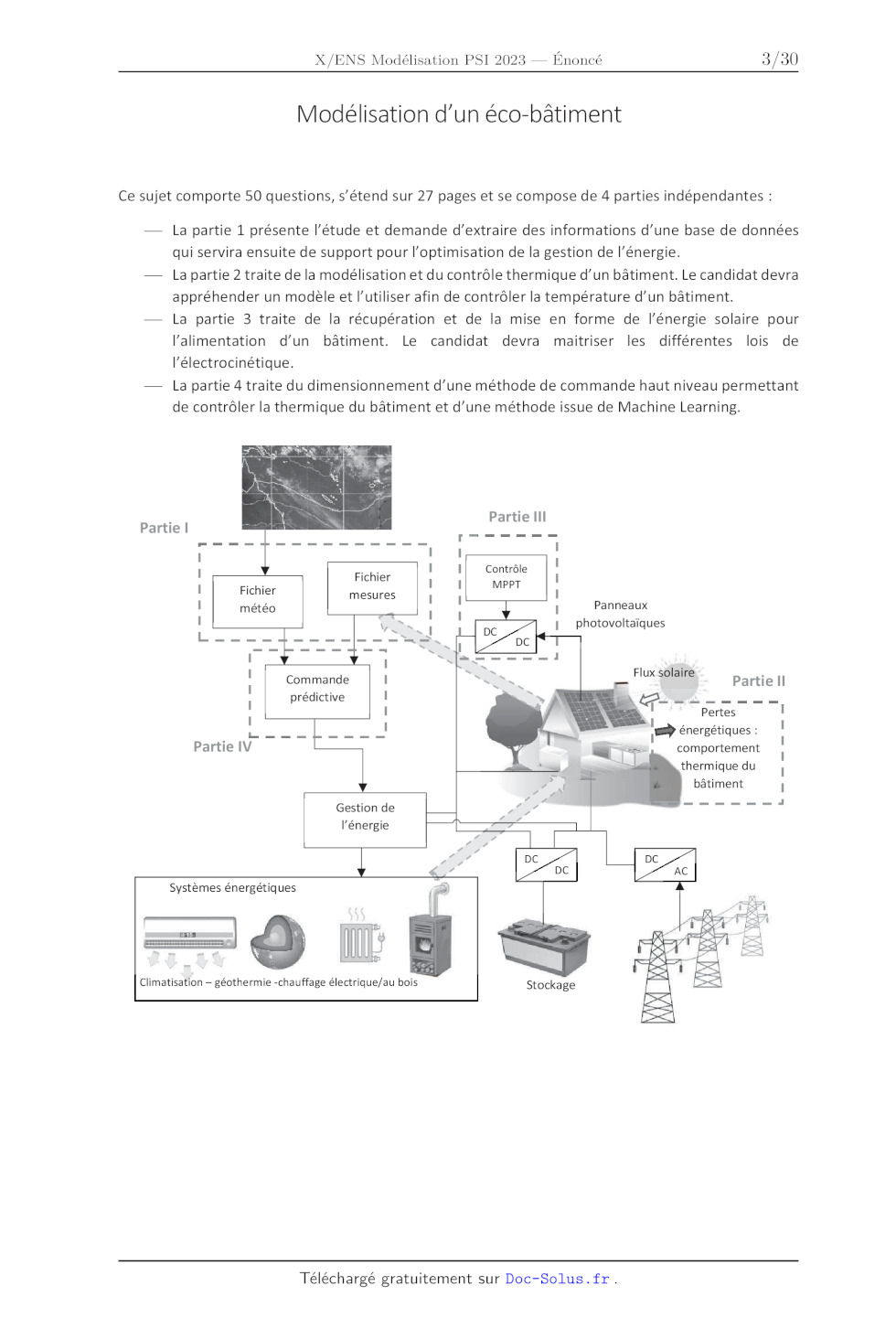
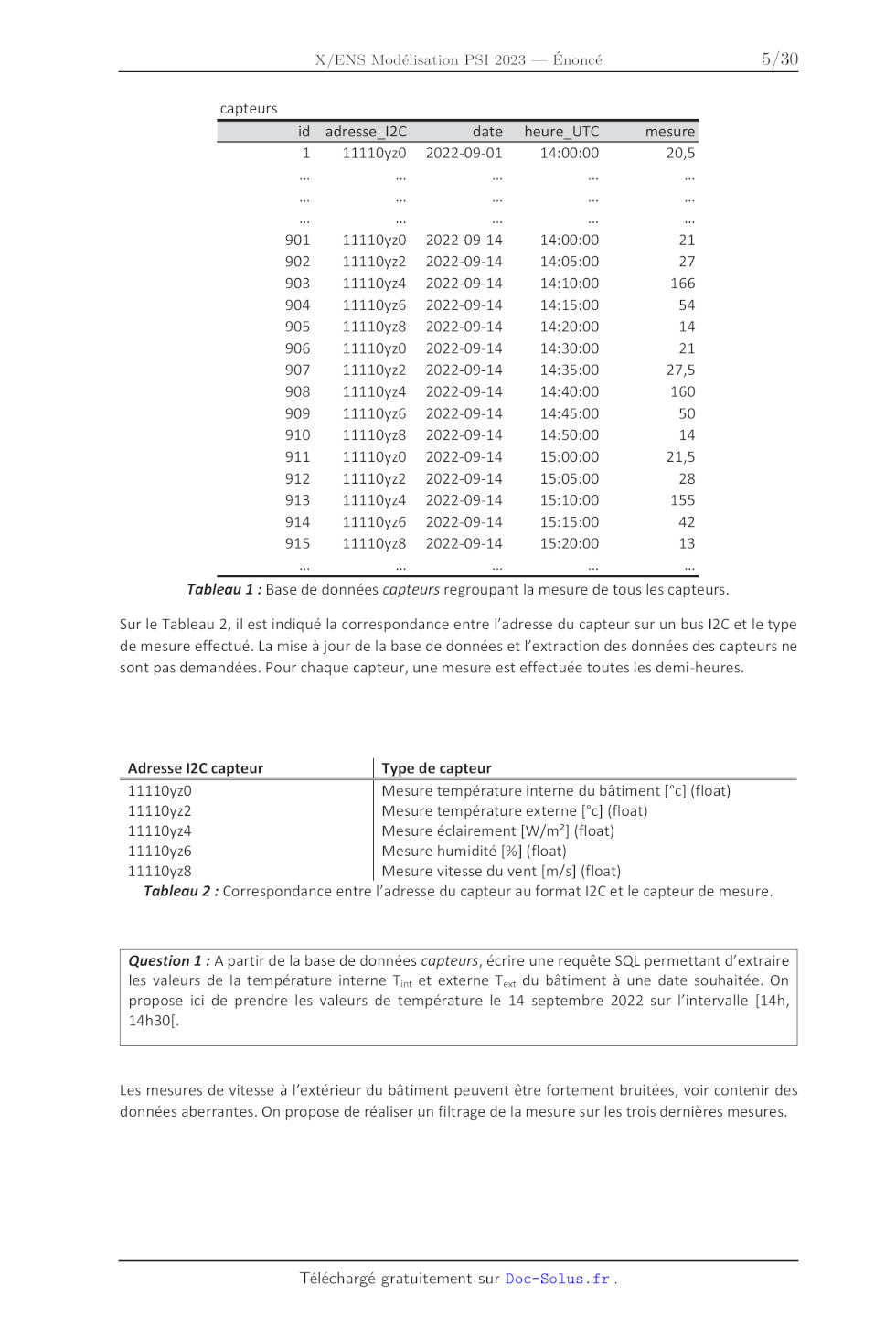
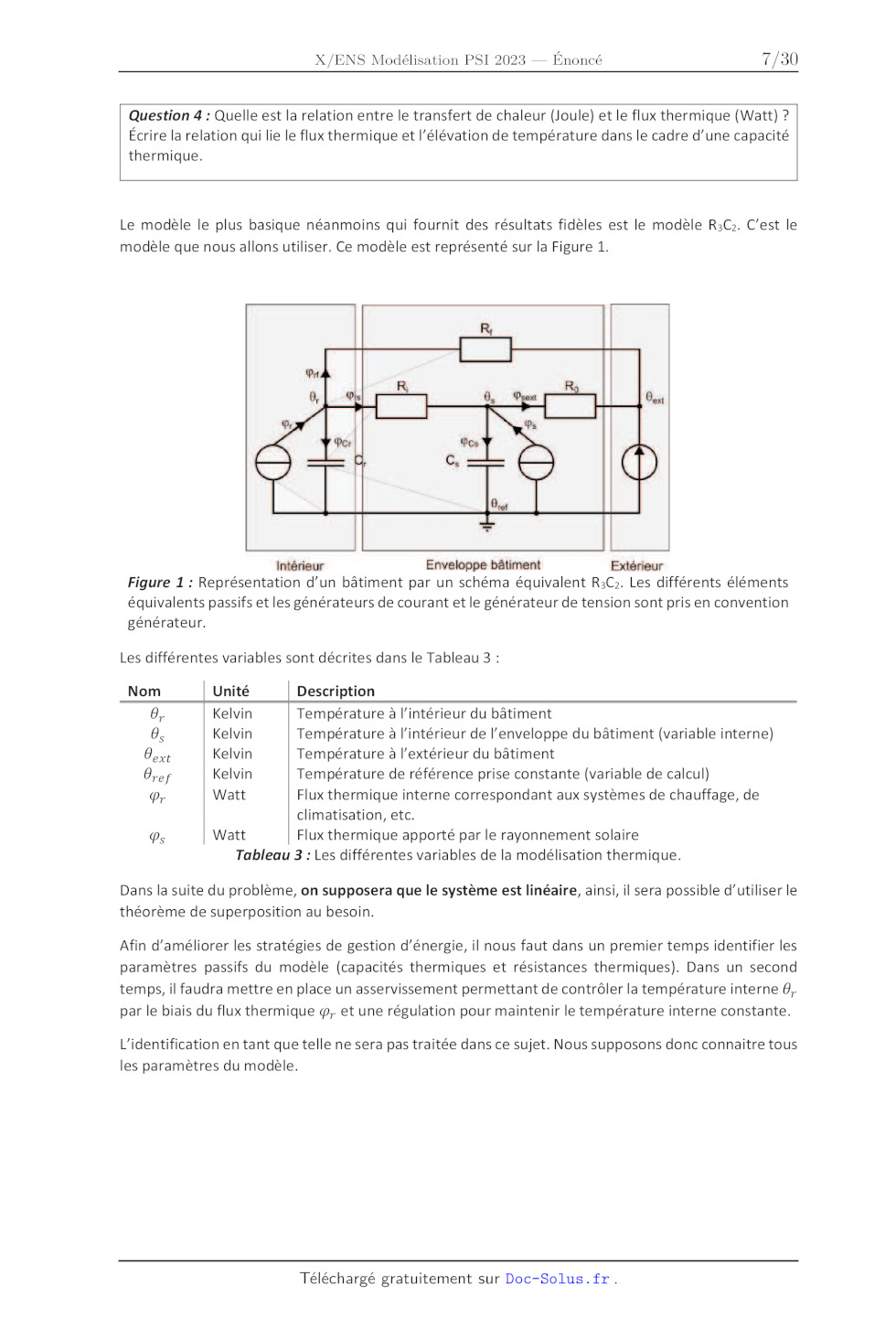
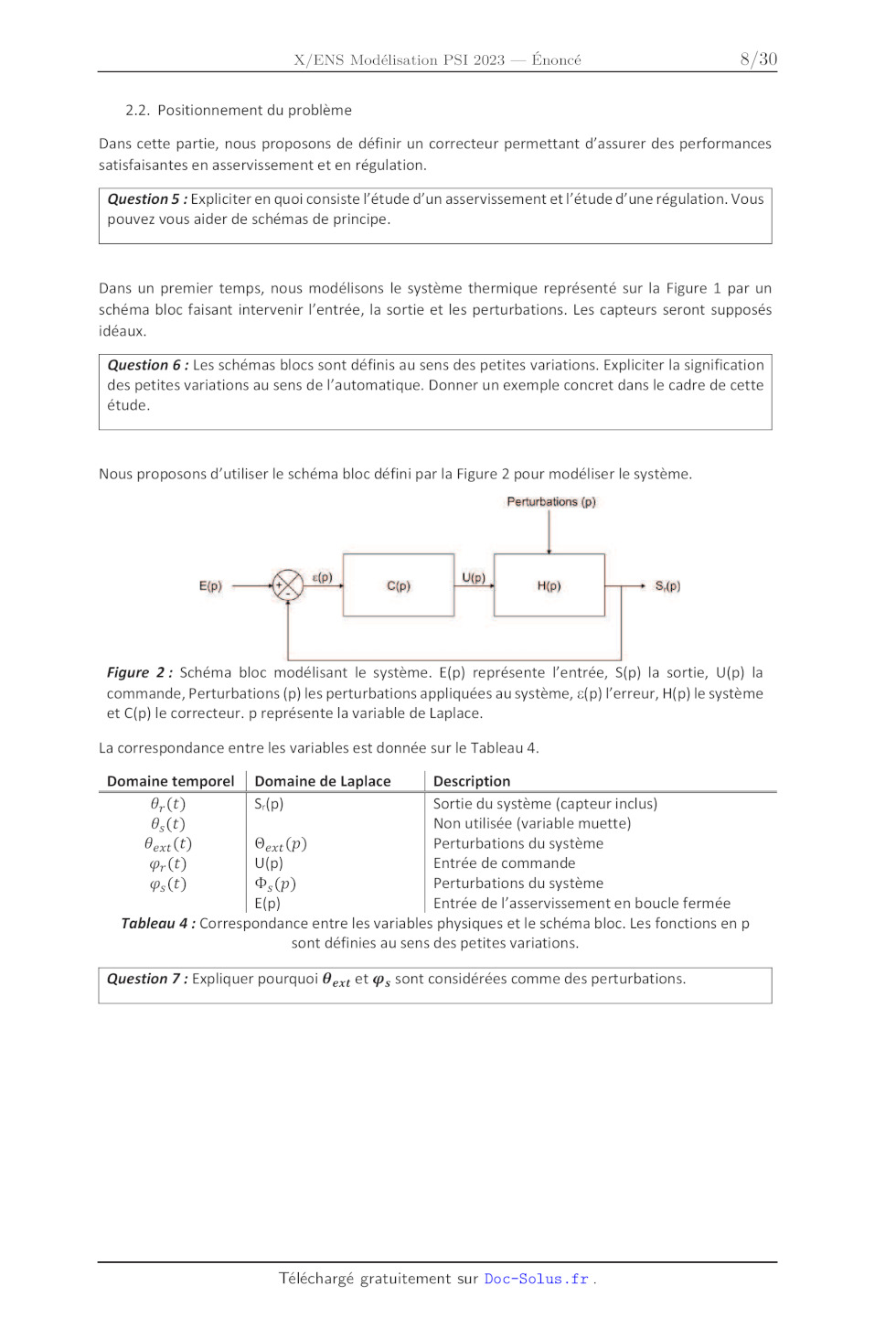
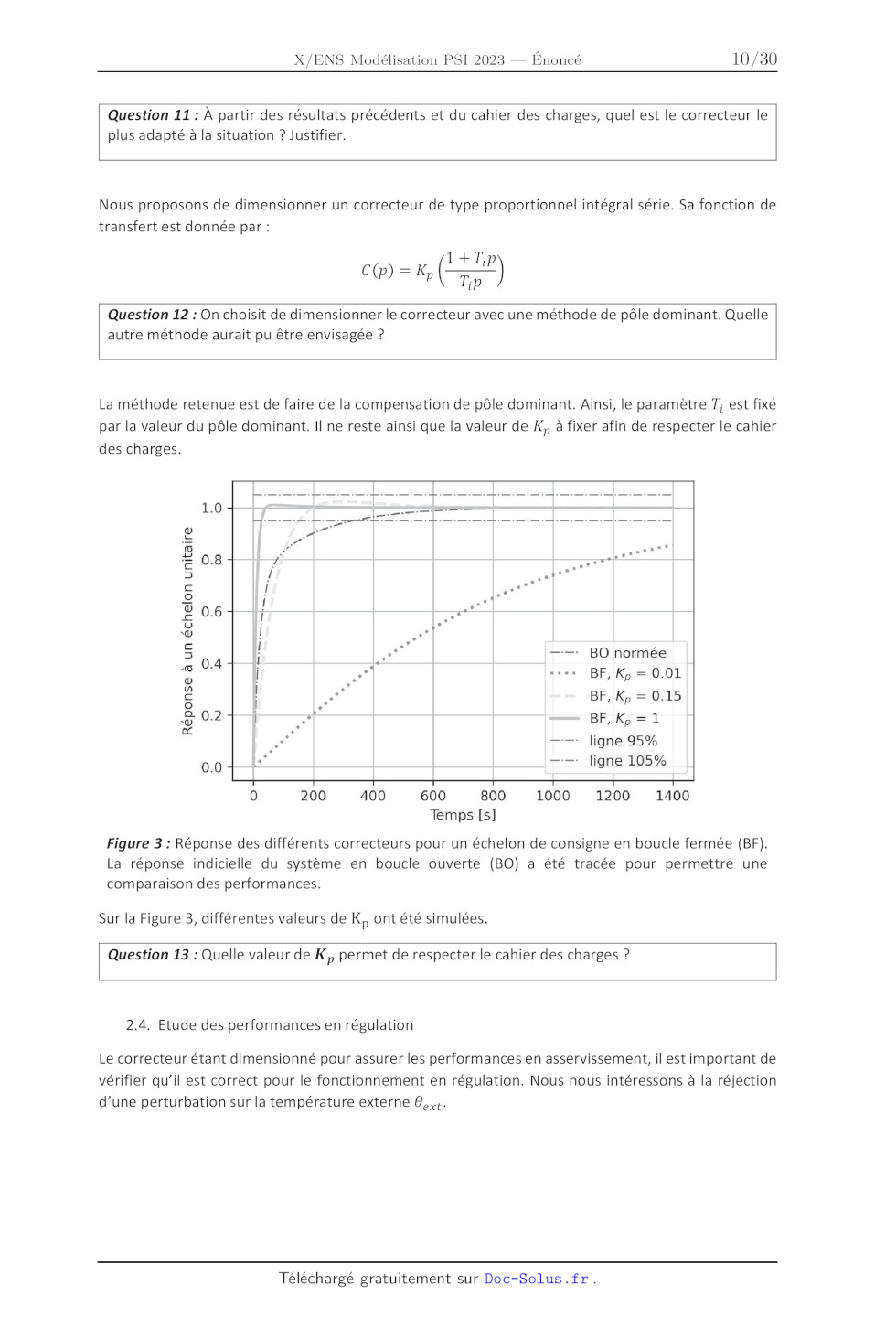
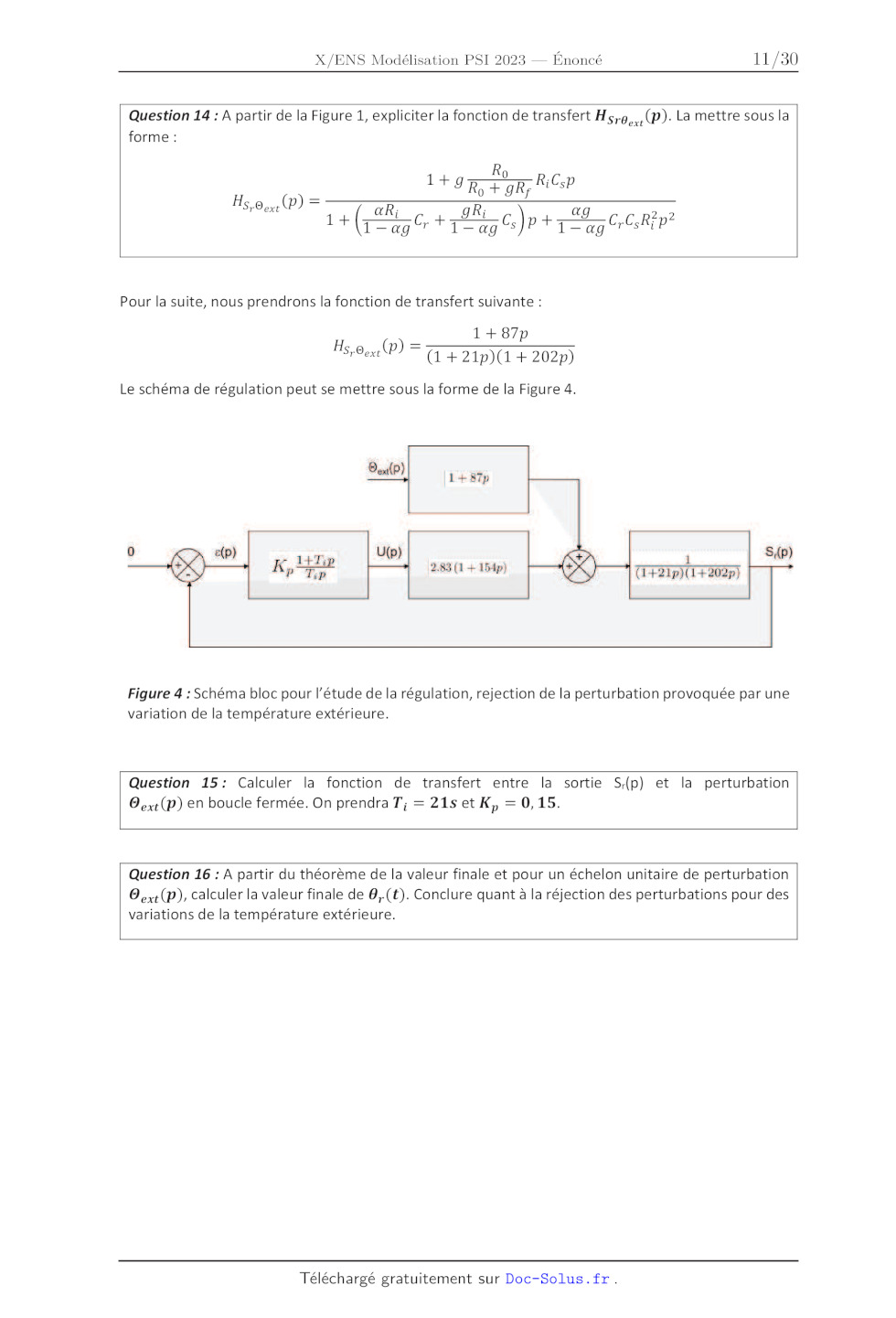
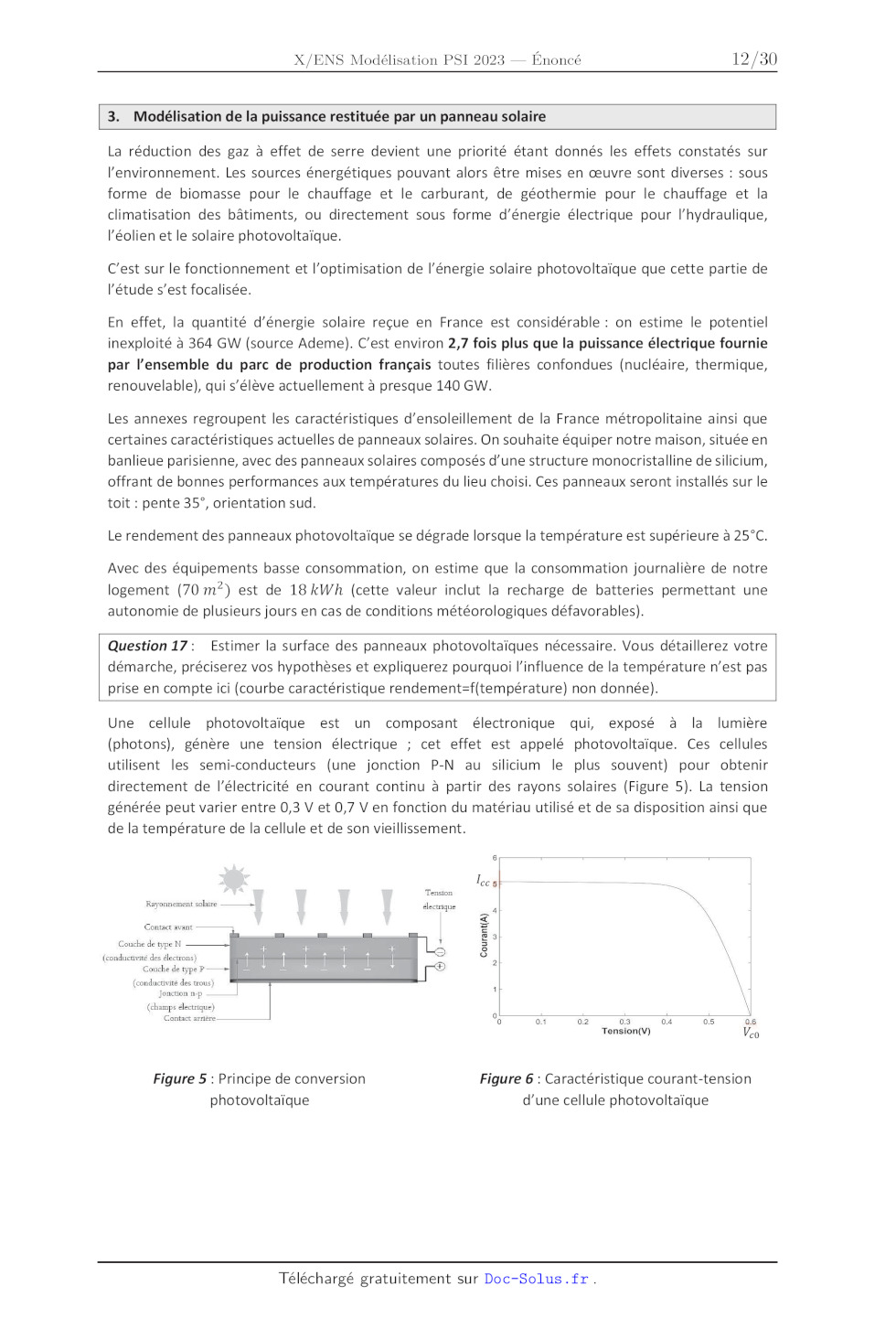
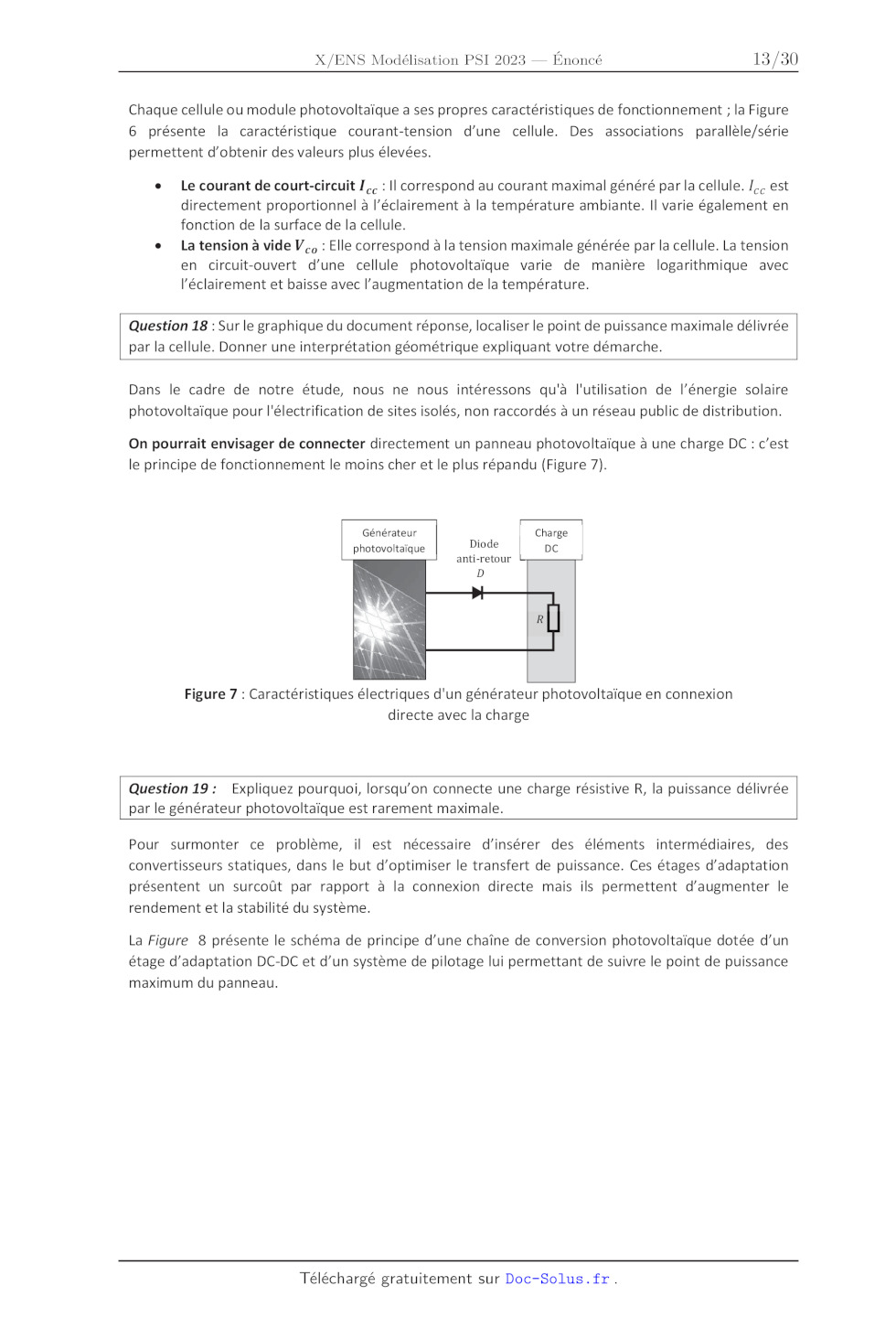
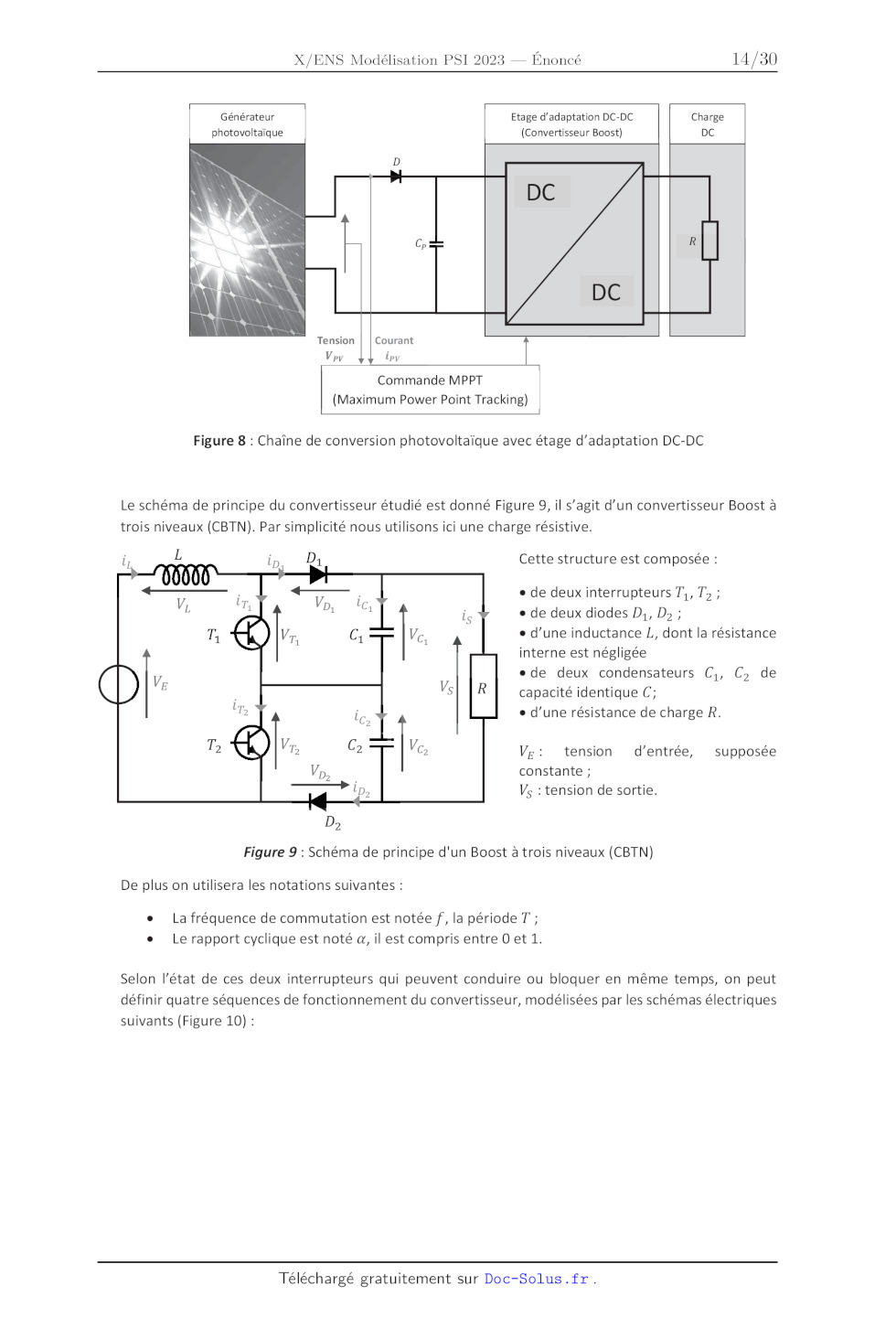
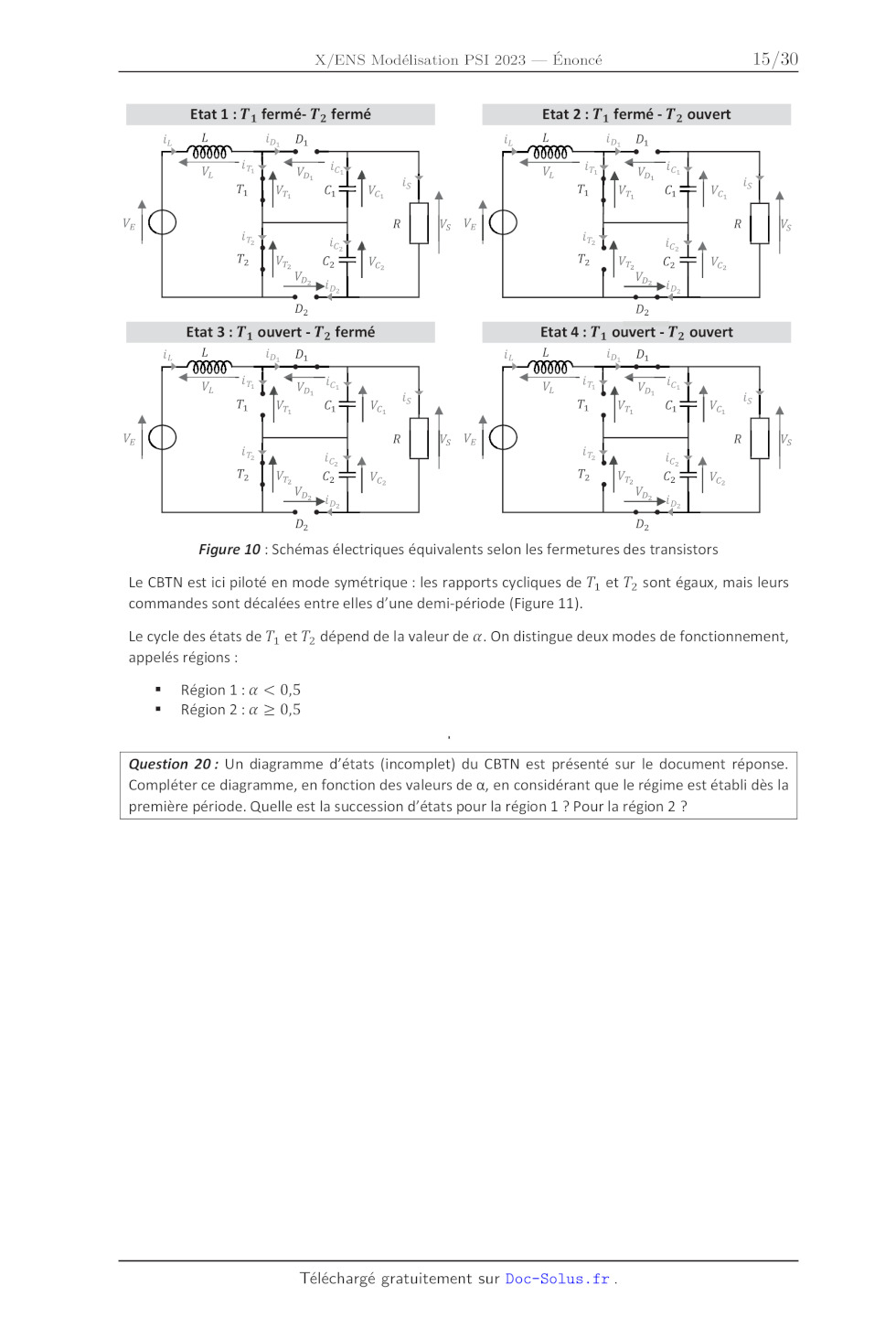
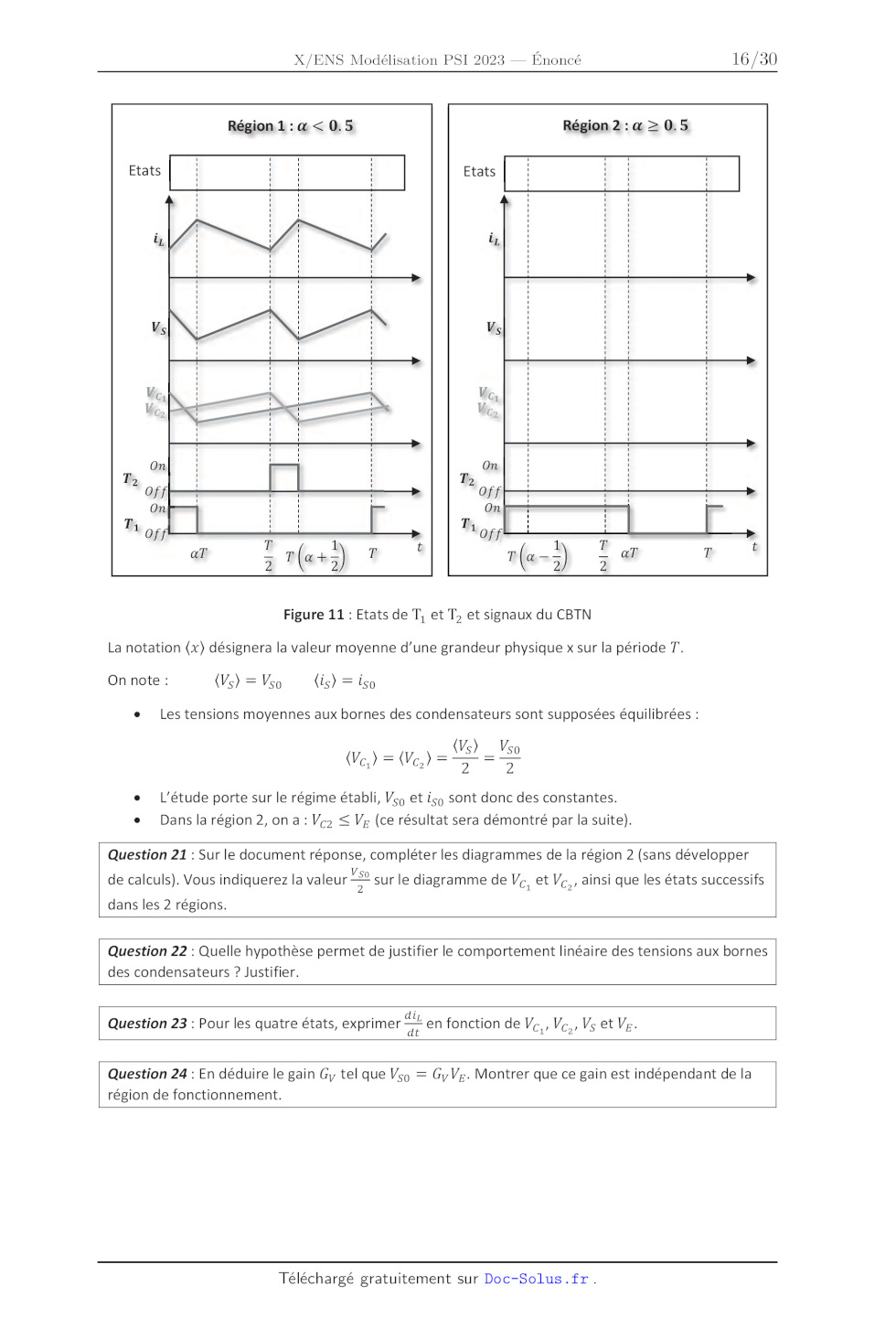
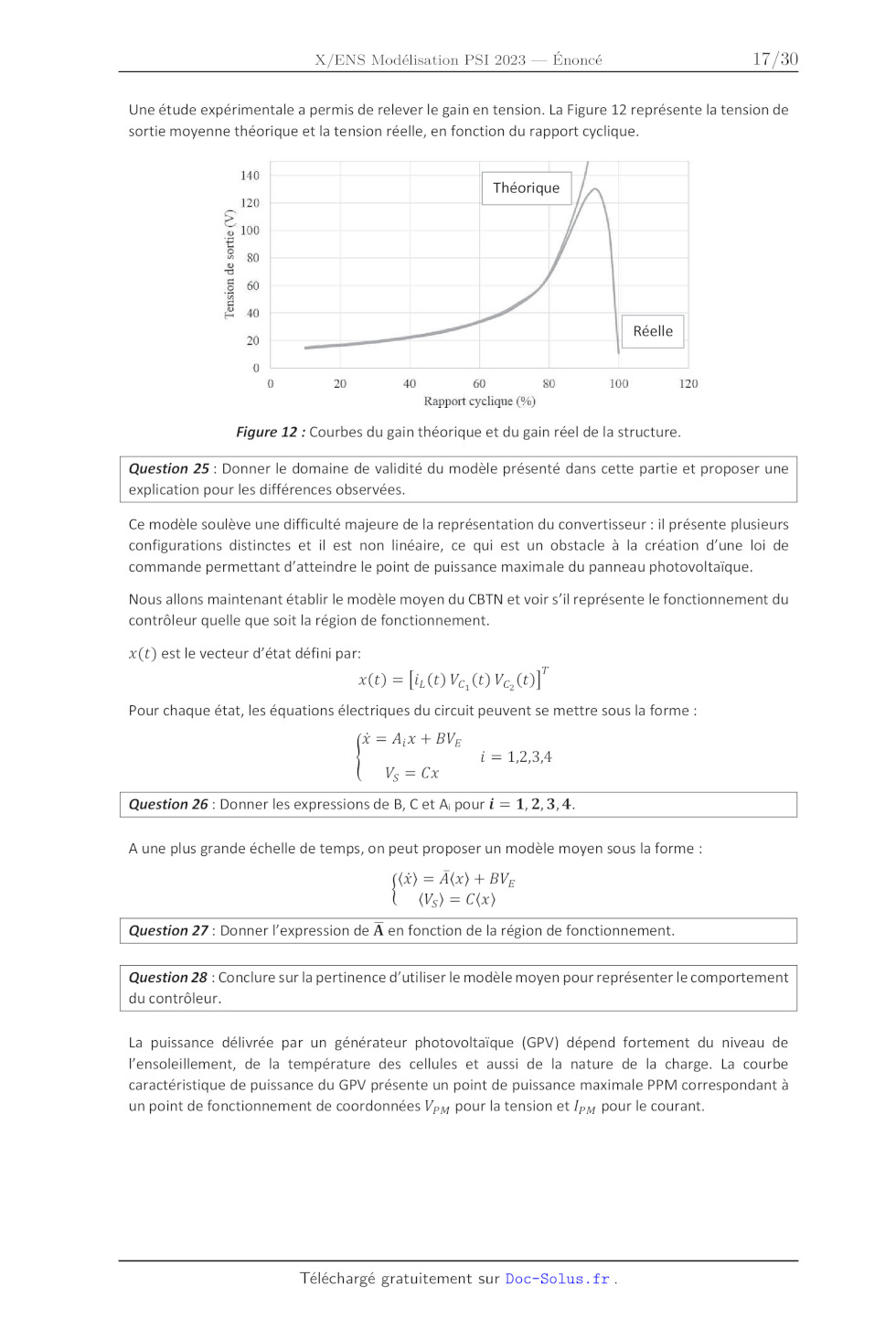
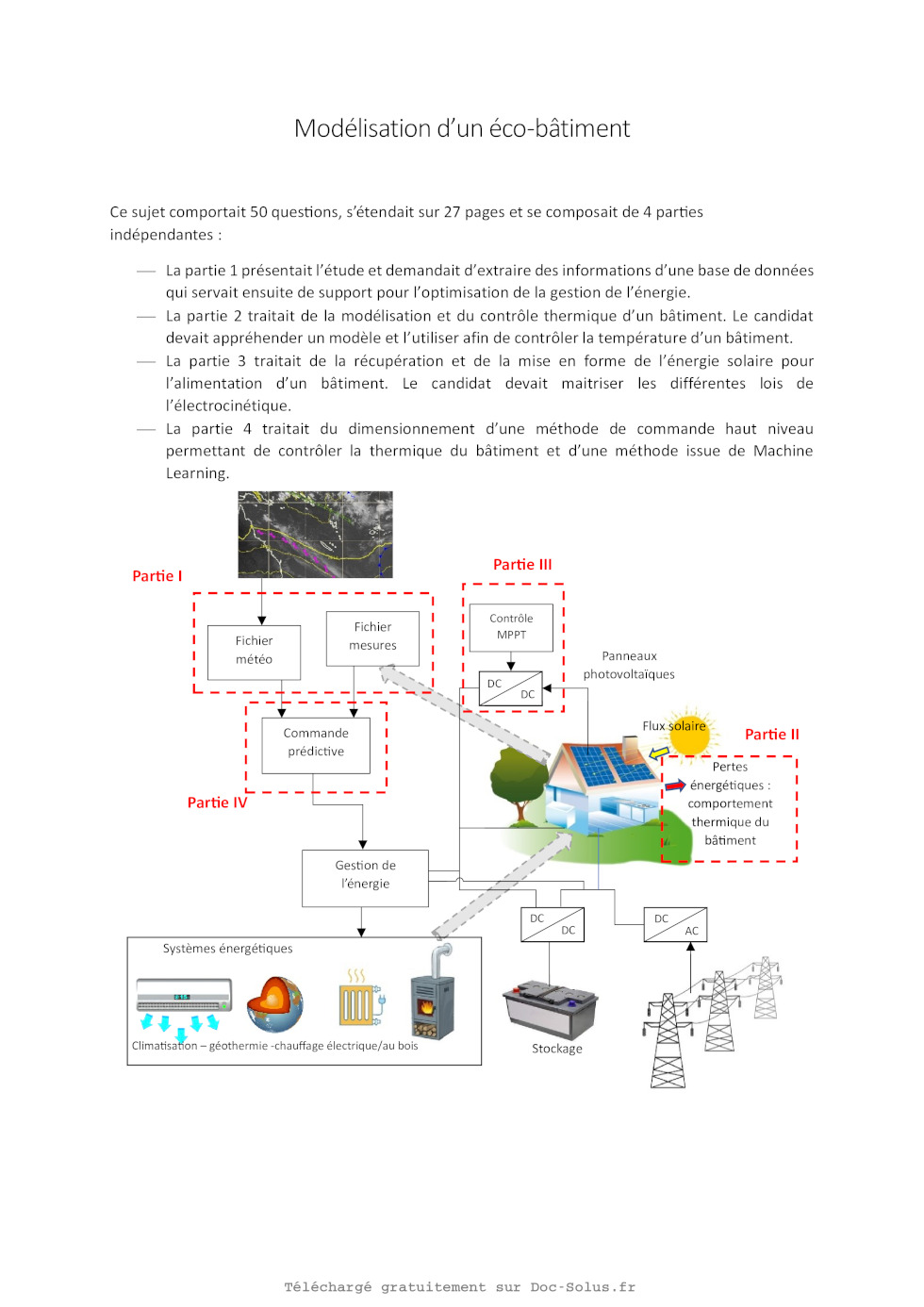
ECOLES NORMALES SUPERIEURES ECOLE POLYTECHNIQUE CONCOURS D'ADMISSION 2023 VENDREDI 21 AVRIL 2023 8HOO0 -- 13H00 FILIERE PSI MODELISATION EN SCIENCES PHYSIQUES ET SCIENCES DE L'INGENIEUR Durée : 5heures L'utilisation de calculatrices n'est pas autorisée pour cette épreuve. Il est recommandé aux candidats : e De respecter l'ensemble des notations alphabétiques et numériques du sujet ; e De préciser ses propres notations lorsque cela s'avère nécessaire ; e De justifier ses hypothèses et rédiger clairement ses réponses ; e De numéroter soigneusement les pages de sa copie. Modélisation d'un éco-bâtiment Ce sujet comporte 50 questions, s'étend sur 27 pages et se compose de 4 parties indépendantes : -- La partie 1 présente l'étude et demande d'extraire des informations d'une base de données qui servira ensuite de support pour l'optimisation de la gestion de l'énergie. ---- La partie 2 traite de la modélisation et du contrôle thermique d'un bâtiment. Le candidat devra appréhender un modèle et l'utiliser afin de contrôler la température d'un bâtiment. -- La partie 3 traite de la récupération et de la mise en forme de l'énergie solaire pour l'alimentation d'un bâtiment. Le candidat devra maitriser les différentes lois de l'électrocinétique. -- La partie 4 traite du dimensionnement d'une méthode de commande haut niveau permettant de contrôler la thermique du bâtiment et d'une méthode issue de Machine Learning. - Partie Ill Partie I ------ | | | | | | Contrôle l Fichier I chi l ] MPPT I Fichier mesures | ] l météo | Panneaux I , | photovoltaïques L | L_| DC I DC Ï y I QE Flux solaire | Commande l Partie Il prédictive l EEE -- -- -- -- | Pertes : LL 2 I nd énergétiques : | Partie IV comportement thermique du Y u bâtiment | Gestion de = : l'énergie DC AC Systèmes énergétiques ca ' FE 7 Ms KE] ) == LIL: Ê Climatisation -- géothermie -chauffage électrique/au bois Stockage 1. Présentation de l'étude 1.1. Contexte et problématique de l'étude Le rapport du GIEC 2022 a mis en exergue l'importance du secteur du bâtiment dans la lutte contre le réchauffement climatique. Le secteur du bâtiment représente 44% de l'énergie consommée en France et émet plus de 123 millions de tonnes de CO2 (chiffres officiels du gouvernement Français en 2021). Ainsi, les experts du GIEC estiment qu'en mobilisant des solutions performantes, 61% des émissions de polluants pourraient être évitées dues au secteur du bâtiment en s'appuyant sur trois stratégies : e Une politique d'efficacité énergétique (42%) ; e Réduction de la demande en matériaux et en énergie (10%) ; e Favoriser les énergies renouvelables (9%). Plusieurs éléments viennent aider cette transition comme l'émergence des nouveaux réseaux « intelligents » : smart grid, éco maisons, green buildings, éco quartiers. Ces réseaux possèdent une vision locale du rapport producteur -- consommateur d'énergie. Dans ce sujet, nous allons aborder les différentes problématiques liées au green building. Le green building est conçu pour réduire l'impact global du bâtiment sur l'environnement tout en garantissant un niveau de confort important aux utilisateurs. Pour cela, les green buildings produisent et stockent une partie de leur énergie nécessaire sous différentes formes comme thermique, électro-chimique, etc. Ces réseaux sont également guidés par l'IOT (Internet of Things) formant un écosystème digital. Les capteurs de température, de consommation d'énergie, de présence sont connectés à internet et permettent une gestion optimale des énergies pour un ensemble de bâtiments. La première étape pour concevoir un éco-bâtiment est de prévoir dès la phase de conception du bâtiment des matériaux respectueux de l'environnement, de l'extraction de la matière première, à la fabrication, l'utilisation puis le recyclage. Cette démarche est appelée éco-conception. Nous ne la traiterons pas dans ce sujet. Dans un second temps, pour mettre en place des stratégies optimales d'énergies, il est nécessaire de modéliser la thermique du bâtiment. Cette étape est primordiale mais néanmoins très complexe. La modélisation dépend de l'environnement (ensoleillement, températures, pluviométrie, etc.), de la structure du bâtiment et des moyens de contrôle des énergies. À partir des besoins en énergies exprimés pour le fonctionnement du bâtiment, il est nécessaire de prévoir les différents moyens d'approvisionnement en énergie du bâtiment du point de vue thermique, électrique, solaire, en fluide, etc. Une fois tout cela exprimé, il est possible de définir une stratégie haut niveau de contrôle du bâtiment prenant en compte toutes les sources d'énergie et la maximisation du confort de l'utilisateur. 1.2. Rôle des différents capteurs Le green building ne peut être efficient sans un nombre important de capteurs pour contrôler, anticiper, réguler les différentes sources d'énergies. Le développement des IOT permet de centraliser toutes ces informations de manière efficace mais également de traiter un grand nombre d'informations. Une solution possible par la gestion des informations des différents capteurs est l'utilisation d'une base de données, Tableau 1, où l'on vient enregistrer périodiquement les informations issues des capteurs. capteurs id adresse 12C date heure UTC mesure 1 11110yz0O 2022-09-01 14:00:00 20,5 901 11110yz0O 2022-09-14 14:00:00 21 902 11110yz2 2022-09-14 14:05:00 27 903 11110yz4 2022-09-14 14:10:00 166 904 11110YzZ6 2022-09-14 14:15:00 54 905 11110yz8 2022-09-14 14:20:00 14 906 11110yz0O 2022-09-14 14:30:00 21 907 11110yz2 2022-09-14 14:35:00 27,5 908 11110yz4 2022-09-14 14:40:00 160 909 11110YzZ6 2022-09-14 14:45:00 50 910 11110yz8 2022-09-14 14:50:00 14 911 11110yz0O 2022-09-14 15:00:00 21,5 912 11110yz2 2022-09-14 15:05:00 28 913 11110yz4 2022-09-14 15:10:00 155 914 11110YzZ6 2022-09-14 15:15:00 42 915 11110yz8 2022-09-14 15:20:00 13 Tableau 1 : Base de données capteurs regroupant la mesure de tous les capteurs. Sur le Tableau 2, il est indiqué la correspondance entre l'adresse du capteur sur un bus I2C et le type de mesure effectué. La mise à jour de la base de données et l'extraction des données des capteurs ne sont pas demandées. Pour chaque capteur, une mesure est effectuée toutes les demi-heures. Adresse 12C capteur Type de capteur 11110yz0 Mesure température interne du bâtiment [°c] (float) 11110yz2 Mesure température externe [°c] (float) 11110yz4 Mesure éclairement [W/m'] (float) 11110yz6 Mesure humidité [%] (float) 11110yz8 Mesure vitesse du vent [m/s] (float) Tableau 2 : Correspondance entre l'adresse du capteur au format 12C et le capteur de mesure. Question 1 : À partir de la base de données capteurs, écrire une requête SQL permettant d'extraire les valeurs de la température interne T+ et externe T.x+ du bâtiment à une date souhaitée. On propose ici de prendre les valeurs de température le 14 septembre 2022 sur l'intervalle [14h, 14h30. Les mesures de vitesse à l'extérieur du bâtiment peuvent être fortement bruitées, voir contenir des données aberrantes. On propose de réaliser un filtrage de la mesure sur les trois dernières mesures. Question 2 : À partir de la base de données capteurs, écrire une requête SQL permettant d'extraire les trois dernières mesures de vitesse de vent V,.+ puis d'en faire la moyenne. On propose ici de prendre comme valeur finale de vitesse de vent, la vitesse de vent mesurée le 14 septembre 2022 sur l'intervalle [14h, 14h30[. Cette valeur sera la dernière valeur à considérer pour effectuer le filtrage. Il est nécessaire de prévoir la puissance solaire accessible à un instant donné afin de prévoir les différents échanges d'énergies. Question 3 : À partir de la base de données capteurs, écrire une requête SQL permettant de récupérer l'éclairement Esoiaire à Une date souhaitée puis de calculer la puissance solaire disponible pour le bâtiment en considérant qu'il y a 20m° de panneaux solaires ayant un rendement solaire -- électrique de 20%. On propose ici de prendre les valeurs de température le 14 septembre 2022 sur l'intervalle [14h, 14h30. À partir de ces données capteurs, il est possible de définir des stratégies haut niveau de contrôle du bâtiment en y incluant la thermique et la gestion d'énergie électrique. 2. Modélisation et contrôle thermique d'un bâtiment 2.1. Choix du modèle thermique du bâtiment Pour modéliser la thermique du bâtiment, différentes approches sont mises en jeu : e Une approche globale. Le bâtiment est considéré dans son ensemble avec peu de points de mesure et des modèles de faible complexité. e Une approche locale. Le bâtiment est découpé en plusieurs zones. La complexité des modèles s'accroit avec le nombre de mesures à considérer. e Une approche de simulation fine. Réservée à la recherche car extrêmement gourmande en ressources informatiques. Correspond souvent à une modélisation par des éléments finis. Dans cette étude, pour la modélisation des interactions entre les sources de production de chaleur et les bâtiments, nous adoptons une approche globale. Dans ce cadre, les modèles appliqués utilisent une analogie avec les systèmes électriques en utilisant des résistances thermiques et capacités thermiques : modèle R;C,. X et Y représentent le nombre de résistances thermiques et de capacités thermiques du modèle. Pour rappel une résistance thermique est définie par la relation extraite de la loi de Fourier pour la conduction thermique : Avec À l'élévation de température et o le flux thermique en Watt. La variation de température joue par analogie le rôle d'une tension électrique et le flux thermique le rôle du courant électrique. La capacité thermique quant à elle est définie par : Q = C;nA6 Avec Q le transfert de chaleur en Joule. Le transfert de chaleur joue alors le rôle de la charge électrique stockée d'un condensateur électrique. Question 4 : Quelle est la relation entre le transfert de chaleur (Joule) et le flux thermique (Watt) ? Écrire la relation qui lie le flux thermique et l'élévation de température dans le cadre d'une capacité thermique. Le modèle le plus basique néanmoins qui fournit des résultats fidèles est le modèle R:C:. C'est le modèle que nous allons utiliser. Ce modèle est représenté sur la Figure 1. R es | +6 10 Intérieur Enveloppe bâtiment Extérieur Figure 1 : Représentation d'un bâtiment par un schéma équivalent R:C2. Les différents éléments équivalents passifs et les générateurs de courant et le générateur de tension sont pris en convention générateur. Les différentes variables sont décrites dans le Tableau 3 : Nom Unité Description 6, Kelvin Température à l'intérieur du bâtiment O, Kelvin Température à l'intérieur de l'enveloppe du bâtiment (variable interne) Oxt Kelvin Température à l'extérieur du bâtiment ref Kelvin Température de référence prise constante (variable de calcul) Pr Watt Flux thermique interne correspondant aux systèmes de chauffage, de climatisation, etc. Ps Watt Flux thermique apporté par le rayonnement solaire Tableau 3 : Les différentes variables de la modélisation thermique. Dans la suite du problème, on supposera que le système est linéaire, ainsi, il sera possible d'utiliser le théorème de superposition au besoin. Afin d'améliorer les stratégies de gestion d'énergie, il nous faut dans un premier temps identifier les paramètres passifs du modèle (capacités thermiques et résistances thermiques). Dans un second temps, il faudra mettre en place un asservissement permettant de contrôler la température interne 8, par le biais du flux thermique +, et une régulation pour maintenir le température interne constante. L'identification en tant que telle ne sera pas traitée dans ce sujet. Nous supposons donc connaitre tous les paramètres du modèle. 2.2. Positionnement du problème Dans cette partie, nous proposons de définir un correcteur permettant d'assurer des performances satisfaisantes en asservissement et en régulation. Question 5 : Expliciter en quoi consiste l'étude d'un asservissement et l'étude d'une régulation. Vous pouvez vous aider de schémas de principe. Dans un premier temps, nous modélisons le système thermique représenté sur la Figure 1 par un schéma bloc faisant intervenir l'entrée, la sortie et les perturbations. Les capteurs seront supposés idéaux. Question 6 : Les schémas blocs sont définis au sens des petites variations. Expliciter la signification des petites variations au sens de l'automatique. Donner un exemple concret dans le cadre de cette étude. Nous proposons d'utiliser le schéma bloc défini par la Figure 2 pour modéliser le système. Perturbations (p) E(p) E(p) C(p) U(p) H(p} * S,(p) Figure 2 : Schéma bloc modélisant le système. Ep) représente l'entrée, S(p) la sortie, U(p) la commande, Perturbations (p) les perturbations appliquées au système, £(p) l'erreur, H(p) le système et C(p) le correcteur. p représente la variable de Laplace. La correspondance entre les variables est donnée sur le Tableau 4. Domaine temporel | Domaine de Laplace Description 0,.(t) S;(p) Sortie du système (capteur inclus) 0. (t) Non utilisée (variable muette) Oext(t) O,,1(P) Perturbations du système Pr(t) U(p) Entrée de commande D(t) ®.(p) Perturbations du système E(p) Entrée de l'asservissement en boucle fermée Tableau 4 : Correspondance entre les variables physiques et le schéma bloc. Les fonctions en p sont définies au sens des petites variations. Question 7 : Expliquer pourquoi 8, et @. sont considérées comme des perturbations. On notera dans la suite les différentes fonctions de transfert de la manière suivante : S . °_ Hs. y) = T (p) la fonction de transfert entre la sortie et la commande pour des Ps--0; Oext--0 variations nulles de la perturbation (ï.e. le flux thermique solaire et la température externe qui seront constants). Sr e Hs oe, (D) = o. S (p) la fonction de transfert entre la sortie et le flux thermique U=0; Oext=0 solaire pour des variations nulles de la commande et de la température externe. Sr ° so, (D) = (p) la fonction de transfert entre la sortie et la commande pour U=0; P,=0 des variations nulles de la commande et du flux thermique solaire. ext Pour rendre plus lisible les résultats, nous allons définir deux grandeurs : © q -- Ro isolation de l'intérieur vis-à-vis de l'apport d'énergie solaire et g = T à un apport intégral d'énergie solaire à l'intérieur du bâtiment. Rf Rf+kRi une très grande importance des fuites thermiques dans le bâtiment et a = 1 à une isolation des fuites thermiques du bâtiment par rapport à l'extérieur qui correspond à la transmittance d'énergie solaire. g = 0 correspond à une ee a = qui correspond à la transmittance de déperdition énergétique. æ = 0 correspond à 2.3. Etude de l'asservissement en température Question 8 : À partir de la Figure 1, expliciter la fonction de transfert Hs u(P). La mettre sous la forme : He (D) = @kR; 1 + gk;C| Couche de type P-- @ (conductivité des trous) Jonction n-p TF (champs électrique) \ FREE ARE---- Vo 0.1 0.2 0.3 0.4 0.5 0.6 Tension(V) Vo Figure 5 : Principe de conversion Figure 6 : Caractéristique courant-tension photovoltaïque d'une cellule photovoltaïque 12 Chaque cellule ou module photovoltaïque a ses propres caractéristiques de fonctionnement ; la Figure 6 présente la caractéristique courant-tension d'une cellule. Des associations parallèle/série permettent d'obtenir des valeurs plus élevées. e Le courant de court-circuit Z,. : Il correspond au courant maximal généré par la cellule. 1, est directement proportionnel à l'éclairement à la température ambiante. Il varie également en fonction de la surface de la cellule. e La tension à vide Y,, : Elle correspond à la tension maximale générée par la cellule. La tension en circuit-ouvert d'une cellule photovoltaïque varie de manière logarithmique avec l'éclairement et baisse avec l'augmentation de la température. Question 18 : Sur le graphique du document réponse, localiser le point de puissance maximale délivrée par la cellule. Donner une interprétation géométrique expliquant votre démarche. Dans le cadre de notre étude, nous ne nous intéressons qu'à l'utilisation de l'énergie solaire photovoltaïque pour l'électrification de sites isolés, non raccordés à un réseau public de distribution. On pourrait envisager de connecter directement un panneau photovoltaïque à une charge DC : c'est le principe de fonctionnement le moins cher et le plus répandu (Figure 7). Générateur Charge photovoltaïque Diode DC anti-retour D R | nn à 1% Figure 7 : Caractéristiques électriques d'un générateur photovoltaïque en connexion directe avec la charge Question 19: Expliquez pourquoi, lorsqu'on connecte une charge résistive R, la puissance délivrée par le générateur photovoltaïque est rarement maximale. Pour surmonter ce problème, il est nécessaire d'insérer des éléments intermédiaires, des convertisseurs statiques, dans le but d'optimiser le transfert de puissance. Ces étages d'adaptation présentent un surcoût par rapport à la connexion directe mais ils permettent d'augmenter le rendement et la stabilité du système. La Figure 8 présente le schéma de principe d'une chaîne de conversion photovoltaïque dotée d'un étage d'adaptation DC-DC et d'un système de pilotage lui permettant de suivre le point de puissance maximum du panneau. 13 Générateur photovoltaïque Etage d'adaptation DC-DC Charge (Convertisseur Boost) DC D CP Tension Courant Vpv YY pv DC DC Commande MPPT (Maximum Power Point Tracking) Figure 8 : Chaîne de conversion photovoltaïque avec étage d'adaptation DC-DC Le schéma de principe du convertisseur étudié est donné Figure 9, il s'agit d'un convertisseur Boost à trois niveaux (CBTN). Par simplicité nous utilisons ici une charge résistive. L il nn ins D: <-------- <---- ., Vz LT, Vpn, LC, . Ls T Vr, Ci Ve, À OL " LT, ic, + P Vr, Cry | Ve, Vn, é--- D; Cette structure est composée : e de deux interrupteurs 7, T; ; e de deux diodes D, D, ; e d'une inductance L, dont la résistance interne est négligée e de deux condensateurs C,, C, de capacité identique C; e d'une résistance de charge À. V£: tension d'entrée, supposée constante ; VS : tension de sortie. Figure 9 : Schéma de principe d'un Boost à trois niveaux (CBTN) De plus on utilisera les notations suivantes : La fréquence de commutation est notée f, la période T'; Le rapport cyclique est noté &, il est compris entre 0 et 1. Selon l'état de ces deux interrupteurs qui peuvent conduire ou bloquer en même temps, on peut définir quatre séquences de fonctionnement du convertisseur, modélisées par les schémas électriques suivants (Figure 10) : 14 Etat 1 :7T, fermé-T; fermé Etat 2 :T, fermé - T, ouvert LL L ip, D; LL L ip, D; PE Te WT -- Vi 4 V, "1 Vi 1 * M, É L L Ti l Yr. C lv. ° T | 2 C + | Ve, ° "| D el lk "| D ll L vw . vw : F2 * CT Te è IC, T P À Vr, C> = Vo, D Vr, C> il Ve, V, Vpn, D; D; | Etat 3 : T, ouvert - T; fermé Etat 4 : T, ouvert - T> ouvert LL L ip, D LL L ID, D 7 nf ? 7 ° ] nl «<---- Figure 10 : Schémas électriques équivalents selon les fermetures des transistors Le CBTN est ici piloté en mode symétrique : les rapports cycliques de T; et T, sont égaux, mais leurs commandes sont décalées entre elles d'une demi-période (Figure 11). Le cycle des états de 7, et 1, dépend de la valeur de «&. On distingue deux modes de fonctionnement, appelés régions : " Région1:a«< 0,5 n Région2:a > 0,5 Question 20 : Un diagramme d'états (incomplet) du CBTN est présenté sur le document réponse. Compléter ce diagramme, en fonction des valeurs de à, en considérant que le régime est établi dès la première période. Quelle est la succession d'états pour la région 1 ? Pour la région 2 ? 15 Région 1 : & < 0.5 Région 2 : &æ > 0.5 Etats | : À ! Etats | M A | ! | a E UN TN TN vs 2 AN NN Pa | | on] -- on |: L BR | | 12 E Vip _-- pi Nr _ ri OF--- On ra T L U T | | | F Off -- > D -- | F aT 7 r(a+:) R ft r(a-;) L'or R 2 2 2 Figure 11 : Etats de T, et T, et signaux du CBTN La notation (x) désignera la valeur moyenne d'une grandeur physique x sur la période T. (Vs) = Vso On note : (is) = iso e Les tensions moyennes aux bornes des condensateurs sont supposées équilibrées : V V (Ve) = (Ve,) = © = e L'étude porte sur le régime établi, V et is sont donc des constantes. e Dansla région 2,ona:V,, < V, (ce résultat sera démontré par la suite). Question 21 : Sur le document réponse, compléter les diagrammes de la région 2 (sans développer de calculs). Vous indiquerez la valeur sur le diagramme de VC et Wr,, ainsi que les états successifs dans les 2 régions. Question 22 : Quelle hypothèse permet de justifier le comportement linéaire des tensions aux bornes des condensateurs ? Justifier. - / . di . Question 23 : Pour les quatre états, exprimer E en fonction de VW, V,, Vs et Vz. Question 24 : En déduire le gain G;, tel que Vo = GyV£. Montrer que ce gain est indépendant de la région de fonctionnement. 16 Une étude expérimentale a permis de relever le gain en tension. La Figure 12 représente la tension de sortie moyenne théorique et la tension réelle, en fonction du rapport cyclique. Théorique Tension de sortie (V) 5 se | Réelle 0 20 40 60 80 100 120 Rapport cyclique (%) Figure 12 : Courbes du gain théorique et du gain réel de la structure. Question 25 : Donner le domaine de validité du modèle présenté dans cette partie et proposer une explication pour les différences observées. Ce modèle soulève une difficulté majeure de la représentation du convertisseur : il présente plusieurs configurations distinctes et il est non linéaire, ce qui est un obstacle à la création d'une loi de commande permettant d'atteindre le point de puissance maximale du panneau photovoltaïque. Nous allons maintenant établir le modèle moyen du CBTN et voir s'il représente le fonctionnement du contrôleur quelle que soit la région de fonctionnement. x(t) est le vecteur d'état défini par: T x (EUR) = [i,(@) Ve, © Ve, ©] Pour chaque état, les équations électriques du circuit peuvent se mettre sous la forme : À = Aix + BVz i = 1,2,3,4 Vs = CXx Question 26 : Donner les expressions de B, C et A; pour & = 1,2, 3, 4. A une plus grande échelle de temps, on peut proposer un modèle moyen sous la forme : fs) = À(x) + BV; (Vs) = C{x) Question 27 : Donner l'expression de À en fonction de la région de fonctionnement. Question 28 : Conclure sur la pertinence d'utiliser le modèle moyen pour représenter le comportement du contrôleur. La puissance délivrée par un générateur photovoltaïque (GPV) dépend fortement du niveau de l'ensoleillement, de la température des cellules et aussi de la nature de la charge. La courbe caractéristique de puissance du GPV présente un point de puissance maximale PPM correspondant à un point de fonctionnement de coordonnées V/,,/, pour la tension et /» pour le courant. 17 La Figure 13 présente 3 cas de changement de caractéristique : y ' À 3 3 L 3 ... 5 Caractéristique de ? Caractéristique de : Caractéristique de à la charge. à la charge à la charge. Î à Î Variation ë Variation du jPPM; VAR pp, ne durapport PPM, 400" rapport cyclique. À rapport cyclique. | \Varation b cyclique. / : N Variation à i \Y L ) PPM; i | ot PL 4 ; d / Î ; " Variation C ( 4 D < %:\ #P j VV] VV] VV] (a) (b) (c) Figure 13 : Trois cas de perturbation du point de fonctionnement Question 29 : Associer à chaque figure un type de variation parmi les propositions suivantes : variation de température, de charge, d'ensoleillement. La partie suivante décrit une méthode de poursuite du point de puissance maximale, qui consiste à agir sur le rapport cyclique en fonction des variations de conditions atmosphériques et/ou de charge. La détermination du point de puissance maximale est basée ici sur la mesure du courant et de la tension aux bornes de la charge. Mais selon les conditions de variation du rapport cyclique, le système peut osciller autour de ce point et, dans le cas de variations rapides des conditions météorologiques, l'algorithme peut même diverger. La méthode proposée doit donc assurer la stabilité du contrôleur. La figure 14 illustre la structure de commande pour la recherche du point de puissance maximale. Générateur photovoltaïque Convertisseur boost Charge à trois niveaux (CBTN) DC D is L D; | -- D ls Cp R Vs Tension Courant Vpy Lpy Rapport cyclique Commande MPPT (Maximum Power Point Tracking) © >| ML Figure 14 : Schéma de la commande du MPPT 18 Le modèle moyen développé dans la partie précédente permet d'écrire les équations décrivant le comportement de la chaîne de production photovoltaïque (les deux condensateurs ont la même valeur : C1 = C> = C): CA ii P dt PV L di, à La Vpy -- (1 -- a)Vs dVs | | CE -- 2(1 -- @)iy -- Zis La stratégie de cette commande est d'introduire une variable z, égale à op | V puis de faire tendre cette OVpy variable vers une référence z:,.- (dans notre cas z1,ef = Ü). z1 S'appelle la première erreur de poursuite. Question 30 : Exprimer z. en fonction de ipy, Vpy et éventuellement leurs dérivées partielles. En r q . . dz = y . déduire la relation entre z; = Te Cp, L, tpy et ses dérivées partielles. Pour étudier la stabilité de ce système dynamique, nous nous appuyons ici sur l'existence d'une fonction de Lyapunov et le théorème associé (aucune connaissance particulière n'est requise ici) : Fonction de Lyapunov : fonction continue V(x), définie positive, telle que : 0e VxÆ£0O V(x)>0 et V(x) =0 pour x =0; e VxÆ0 V(x)<0 et V(x) =0 pour x = 0; Théorème de Lyapunov : e __Siune fonction de Lyapunov existe pour un système donné alors ce système est stable ; ° Si la fonction de Lyapunov est strictement décroissante, V(x) < 0 Vx + 0, alors la stabilité est en plus asymptotique. 1 On propose la fonction suivante : V, (z1) = 4° Question 31 : A l'aide d'une constante K., déterminer une relation entre Z, et z. pour que la fonction V, soit une bonne candidate pour assurer la stabilité du système. Il n'est pas demandé d'expliciter K.. Question 32 : En déduire une relation entre K,, C», ipy, i et Vhy (et leurs dérivées). La figure suivante (Figure 15) représente ce qui vient d'être établi: le courant i; permettant d'atteindre le point de puissance maximale du générateur photovoltaïque. rs ur Vpy Lpy li Relation de la question 32 ---- Courant Figure 15 : Positionnement de la relation établie à la question 32 Si cette relation intégrait directement le rapport cyclique «, il serait facile de piloter le contrôleur tout en assurant la stabilité du système. Mais i, n'est pas la commande effective, il s'agit de «. 19 La grandeur i; qui intervient dans la relation trouvée devient alors la consigne de pilotage ë,.ç (Figure 16). Tension Courant Courant Vpy Lpy LL | Commande MPPT LM MN M . v À | l | Rapport cyclique . lc + Z2 , . a Question 32 À déterminer > Figure 16 : Architecture de la loi de commande MPPT Cette consigne dépend du temps. Le pilotage du rapport cyclique peut alors induire une erreur entre la valeur souhaitée 1,.- et l'intensité réelle i,. On note 7, cette erreur : Z2 -- lg -- lc La commande recherchée doit donc également faire tendre l'erreur z, vers 0. dz Question 33 : Exprimer z; -- Te en fonction de &, i,. et des tensions V,, et W. t e e , dv. . # e f f Question 34 : Exprimer V, = Pr en fonction de z., z, et des grandeurs électriques du générateur photovoltaïque. L'apparition de cette erreur remet en question la stabilité du système dynamique. On fait alors appel à une seconde fonction de Lyapunov : 1 V:(z1) = 5 A + --7,° 2 Question 35 : Par un raisonnement similaire à la première fonction V,, établir une relation entre z, et Z, avec une nouvelle constante K,, pour que V, puisse assurer la stabilité du système. Question 36 : En déduire l'expression du rapport cyclique æ qui permettra d'atteindre l'objectif de poursuite du point de puissance maximale. 20 4. Construction d'une loi de pilotage prédictive Dans cette partie, nous allons mettre en place une loi de commande qui pilotera les différents systèmes de régulation énergétiques afin d'obtenir une température consigne du bâtiment. En s'appuyant sur le modèle développé en seconde partie, cette commande devra être prédictive et exploitera la base de données mise en place au début de ce sujet : elle prendra en compte les variations météorologiques futures issues de prévisions et/ou données des années précédentes. Cette commande doit répondre aux besoins de confort thermique et de consommation énergétique. On souhaite que la température à l'intérieur du bâtiment se rapproche d'une température consigne T,. On note y = Te -- Tinitine la Variation de température correspondante, ce qui permet d'avoir des conditionsinitiales nulles. La commande des systèmes de régulation sera notée x(t). La méthode consiste à déterminer la séquence future et la commande à appliquer en vue de forcer la sortie à suivre une trajectoire prédéfinie : la trajectoire de référence, Figures 17 et 18. À Consigne : variation de température y. Vref (tx+1) Ym (r+1) Yr(tr+1) À  D- passé ty Cryr futur instant ty4y, horizon de prédiction : TEMPS À, = À,, : la trajectoire de référence est rejointe Figure 17 : Evolutions de la température réelle, de la température issue du modèle et de la trajectoire de référence Bâtiment réel À 2 G,.@) » ,.(p) Signal pilotant le processus de chauffage Modèle D> Gn (p) D Ym (p) Figure 18 : Schéma du système avec le bâtiment réel et le modèle 21 En se basant sur le travail réalisé dans la première partie de ce sujet (en ne gardant que le pôle dominant), on propose : Go) = KE) 2 Kre Go) = EP) 2 Km ' X(P) 1+7,p 7 X(P) 1+7TmP Le retard 7, provient de la réactivité des systèmes de régulation. L'incrément de température qui doit être atteint, entre l'instant t4 et l'horizon de prédiction t,.Hest : À; ( tr+n) -- A tr+n) -- Yr( tr) Où t4 représente l'instant présent. On peut également fixer l'incrément désiré dans l'espace du modèle : Am ( tr+n) -- Ym tr+n) -- Ym tr) La loi de commande prédictive s'obtient à partir de l'égalité entre la trajectoire de référence et la sortie prédite du processus en un point de coïncidence tz1y : À; (tr+n) = AmCtr+n) = Yref( tr+n) -- Yref( tr) Il s'agit maintenant de construire le modèle échantillonné. La période d'échantillonnage est constante (7,) et on utilise un bloqueur d'ordre zéro (BOZ), qui maintient le signal constant jusqu'à l'échantillon suivant, Figures 19 et 20 : À A y(t) : évolution continue y; (EUR) : fonction échantillonnée ° y; (EUR) : fonction échantillonnée avec bloqueur d je . ; 7 Utilisation d'un LT bloqueur d'ordre | zéro | » t t O T, 2T, nt, O T, 2T, nt, Figure 19 : Fonctionnement du bloqueur d'ordre 0 Te k XD) _- 807 c Yr @) ---- r() Signal échantillonné Figure 20 : Modèle dans le domaine de Laplace du bloqueur et du système La réponse impulsionnelle du bloqueur est représentée sur la Figure 21 : À 1! t D. D" t t+T, Figure 21 : Réponse impulsionnelle du bloqueur d'ordre 0 Question 37 : Exprimer la réponse impulsionnelle du usoz(t) bloqueur. En déduire sa fonction de transfert U:0z(D). 22 On peut ainsi obtenir l'équation de récurrence du système, mais en utilisant une méthode (la transformée en z) qui n'est pas au programme de PSI. Nous ne la développerons donc pas plus ici. Cette équation de récurrence, exacte, est la suivante : Le Yr(tr+1) -- &yYr (tx) + K,(1 -- dr)X(tx+1 -- Nr) avec a =e Tr (On considère que 7. est un multiple de la période T.). Nous pouvons en revanche obtenir une approximation de cette équation, en utilisant la méthode d'Euler. Question 38 : Ecrire l'équation différentielle à l'origine de la fonction de transfert G,;.(p) puis exprimer Yr(tr+1) en vous appuyant sur le schéma d'Euler explicite. Question 39 : En déduire l'équation de récurrence approchée à l'ordre 1, sous la forme : Yr(tr+1) -- @gYr(tr) + Bex(tr -- Nr) Question 40 : Donner la relation entre f; et ak. Comparer ensuite les coefficients «,. et «; et formuler une relation entre T, et 7, pour que le schéma d'Euler soit précis. On considère la commande comme constante, égale à une valeur x(k) après son application à l'instant k : X(tr) = X(tx+1) = Xr42) = + = X(tx+n) Question 41 : Déterminer la prédiction de l'évolution du système de régulation : Vr(tr+n) = Or (x), XGx), ar, kr) Question 42 : Par analogie, exprimer la commande prédictive du modèle : Ymr+4) = fm), X(tr), Ar, Km) La trajectoire de référence est choisie de forme exponentielle, avec une constante de temps t.liée au délai souhaité pour que la température consigne soit atteinte : ITR Yref ) -- Yref x) + (ve -- Yrer (Ex)) (: --e Te ] Question 43 : En exploitant la coïncidence à l'horizon t,.,, entre le système réel et la référence, _Te déterminer l'incrément 4,(t4+#) en fonction de y, y;er(tx), Heti=e Te. Question 44 : Exprimer l'incrément du modèle 4,,(t;,:) en fonction de y,,(t4), x(tz), &r, Km et H. La première partie de ce sujet a mis en évidence l'utilisation d'une base de données, actualisée régulièrement. L'intérêt de la commande développée ici est d'utiliser ces données pour recaler la trajectoire de référence à chaque pas de temps. Ce recalage s'exprime par : Vref (tx) -- Yr (tx) Question 45 : En exprimant la coïncidence, à l'horizon t,.,7, entre l'écart réel et l'écart du modèle, exprimer la loi de commande x(t,) en fonction de y,,(t4), y; (tx), Ve, &r, Km EURt H. 23 La période d'échantillonnage étant faible devant le temps de réponse des systèmes de régulation, on admet que le modèle continu est similaire au modèle discret développé. Question 46 : La Figure 22, ci-dessous, présente une ébauche de la commande prédictive. Reproduire et compléter ce schéma bloc sur le document réponse. Bâtiment réel Y,.(p) Y-(p) X(p) ----{$Q- >| GC) , Modèle Gn() X Yn (D) v Figure 22 : Schéma bloc (incomplet) de la commande prédictive Modèle obtenu par Machine Learning On veut maintenant simplifier le système de commande en améliorant la qualité de ses prédictions : la température de sortie, prédite ou réelle, appartiendra à une des 6 classes décrites par le tableau suivant : Classe | Température y: Classe | Température y,.,: 1 [+7; +20 4 [--2; OI 2 [+2; +7| 5 [--7; --2| 3 [O; +2] 6 [--20; --7[ Figure 23 - Catégories des températures de sortie On commence par enrichir la base de données d'observations créée dans la première partie de ce sujet avec des données issues des diagnostics énergétiques (DPE): prise en compte du type et de l'année de construction, de la surface habitable, de la hauteur de réalisation, du nombre de niveaux, de la surface des parois opaques verticales déperditives, etc... Le modèle prédictif précédent a également permis d'associer à cette base de données les valeurs de sortie pendant une période d'observation. On se tourne donc vers un modèle d'apprentissage (Machine Learning) supervisé (Figure 24) : Base de données Modèle par apprentissage ) supervisé 6 Processus de contrôle des systèmes de Uk régulation thermique Vi v v Figure 24 - Schéma de l'identification 24 Question 47 : Cet apprentissage doit-il utiliser une méthode de régression ou de classification ? Question 48 : Sans rentrer dans le niveau de détail d'un algorithme, donner les différentes étapes de cet apprentissage et associer une méthode de classification ou de régression (selon la réponse à la question précédente). Après avoir nourri l'algorithme correspondant avec la base de données, on mesure sa performance avec une matrice de confusion, donnée ci-dessous : 112413110100 8 1215133, 20/0 0 S 3 | 1 | 1 M9ON 3 1 | 0 & |4| 0 | 4 | 3 M86\ 2 | 0 £|5[011|15]51)29|7 61001012 | 3 |17 1121314) 516 Vr+1 {TUE Figure 25 -- Matrice de confusion de l'algorithme d'apprentissage supervisé Question 49 : Evaluer la sensibilité de chaque classe de la matrice. Cet apprentissage est-il performant (sensibilité>80%) ? Question 50 : Les caractéristiques du logement sont susceptibles d'évoluer au cours du temps. Proposer un autre choix d'apprentissage permettant d'améliorer les performances de ce modèle. 25 Annexes Global horizontal irradiation Europe | de LEnbso Ds CO TE Te | f Ja Stocks solarqgis t Moskva http://solargis.info SG _ LT Kebenhavn ns | Fa $ l TN ç > n." EX Minsk ss ES nu . + : : \ . Berlin 'Warszawa ? A i | A ha Li D \ SN è à $ + Praha", 7 : f° . : $ = \ . DE POS <- | « L- » 8 Ne RTE ee, en S en. ner roue ? ? dE 4 Budépest A çà ° TK D Average annual sum (4/2004 - 3/2010) 0 250 500 km < 700 900 1100 1300 1500 1700 1900 > kWh/m2 © 2011 GeoModel Solar s.r.o. Carte de l'irradiation solaire globale : Energie (kWh) reçue par un panneau photovoltaïque de 1 m'orienté dans des conditions optimales, en 1 an. % 14,4% 131% 14,4% 0 10,9% 77% 9,2% 5,8% 1: 42% l LI li: 3,0% 2,3% D K, @ S ù © S 'a S NX re + à N v S S S © © Y Y S DR Y © Source : Centre Observation, Impacts, Energie - O.IL.E -- MINES ParisTech & ACOFI Répartition mensuelle de l'irradiation annuelle globale horizontale en France 26 Inclinaison (°) 0 15 25 35 50 70 90 Est 88% 87% 85% 83% 71% 65% $ Sud-est 88% 93% 95% 95% 92% 81% 64% Ë Sud 88% 96% 99% 100% 98% 87% 68% ? Sud-ouest 88% 93% 95% 95% 92% 81% 64% Ouest 88% 87% 85% 82% 76% 65% Influence de l'orientation et de l'inclinaison sur le rendement d'un panneau photovoltaïque Rendement constructeur habituel Type de module Minimum Maximum Polycristallin 14 % 18 % Photovoltaique à silicium Monocristallin 16% 25 % Amorphe 5 % 7 % Polycristallin 15 % 20 % Hybride à eau ou aérovoltaique Monocristallin 17 % 28 % Photovoltaique à pérovskite 19 % 33 % Rendement des panneaux photovoltaïques selon la technologie utilisée (2022) Monocristallin Polycristallin Amorphe Elles ont un faible rendement, mais ne nécessitent que de très Ce sont celles qui ont le Leur conception étant plus faibles épaisseurs de silicium et meilleur rendement mais aussi | facile, leurs coûts de fabrication ont un coût peu élevé. Elles celles qui ont le cout le plus sont moins importants, sont utilisées couramment dans élevé, du fait d'une fabrication | cependant leur rendement est de petits produits de compliquée. plus faible. consommation telle que les calculatrices solaires ou encore les montres. Les différents types de cellules photovoltaïques et leurs caractéristiques 27 AUTANT RATS) TR TO TISSU Te [LS 1SUelOU(A) 4 0'S he th te a CNT Tete) eET SERIE Ie NET NIUE RTE TN Te UT Te UNIT Ale a RS) del) Tel TT Te Ce TUE LU o EI E QUE TACIUES L'OTAN TEC Le) le Ne D e (SET 7e ES lolo TITI SAS 010707 e CDS TNT EEE IN e RRUTE PATTES 0 [OTPNUSTS « b\SCGL 162 LENIG2 WA ONAGLGR QOUR |6 1NG1NG 26L2 GE AIU2 LOLAG CR VAUT A ET ROC URL CRUE CEE Re Ce) T =) lee TT OA (CAN TS OT CCR CAT ATTAUNEN TA QC TA UE AT Te Ko 1T1 2) « KEQAGL JAGC NU 2LAlO LOL GLSTIPIS PISN ON VOIL CR LA 01 Te TNT TENTE NT EN EEE Re CAT LE Te ARTS TORETICANT Re ele] TNT Eos er TAN EDLGNAG qe : É LE ue ch L'UEr 1 E © O -- ar CHERS RD CT Een RER PINS LCAUTIUTE RU Do: L'OEE UNE NL DEL E LU UC ACTES ET qu 3 A 17 MATE NAN E RTL [0 TRES CIEL USINE US Te] Nord te) Ve CETTE ER e COR QUE COTE ST ee) Te (OISE NT Te) Re RTC TE Dole) EE eSATA ENeT OR TÉ LETTONIE ET TERETU ele) Te ee RCE UC SOU CEE Te) EST TSTET Ne UE BIEHY ECBIBE DVYHe CE CYDBE HebIOU J:& < 0'2 ELU CO CE NES CEST DE CÉTRACLTeItES | | " T A | CITE AVC ERTU [Te TSI Ë SL EU ee ES LS L eTÉL URI PONNTE ele RE (ST NS UE TE ÉCART TETE TITERS TUE OUT Se PTE RICO CINE NN elNTIe) TRS TENTE LATTES CR CDN ATOS CECTUERNe T7 Tele) lee le RU Do: L'OEE UNE NL DEL E LU UC ACTES ET qu 3 A 17 MATE NAN E RTL [0 TRES CIEL USINE US Te] Nord te) Ve CETTE ER e COR QUE COTE ST ee) Te (OISE NT Te) Re RTC TE Dole) EE eSATA ENeT OR TÉ LETTONIE ET TERETU ele) Te ee RCE UC SOU CEE Te) EST TSTET Ne UE BIEHY ECBIBE DVYHe CE CYDBE HebIOU J:& < 0'2 ELU CO CE NES CEST DE CÉTRACLTeItES | | " T A | CITE AVC ERTU [Te TSI Ë SL EU ee ES LS L eTÉL URI PONNTE ele RE (ST NS UE TE ÉCART TETE TITERS TUE OUT Se PTE RICO CINE NN elNTIe) TRS TENTE LATTES CR CDN ATOS CECTUERNe T7 Tele) lee le