
X Informatique MP 2009
| Thème de l'épreuve | Polynômes positifs |
| Principaux outils utilisés | listes chaînées, fonctions récursives |
| Mots clefs | grand entier, nombres dyadiques, listes à deux bouts, polynômes de Bernstein |
Corrigé
:👈 gratuite pour tous les corrigés si tu crées un compte
👈 l'accès aux indications de tous les corrigés ne coûte que 1 € ⬅ clique ici
👈 gratuite pour tous les corrigés si tu crées un compte
- - - -
👈 gratuite pour ce corrigé si tu crées un compte
- - - - - - - - - - - - - - - - - -

Énoncé complet
(télécharger le PDF)





Rapport du jury
(télécharger le PDF)
Énoncé obtenu par reconnaissance optique des caractères
MP
ÉCOLE POLYTECHNIQUE
FILIÈRE
OPTION INFORMATIQUE
CONCOURS D'ADMISSION 2009
COMPOSITION D'INFORMATIQUE
(Durée : 4 heures)
L'utilisation des calculatrices n'est pas autorisée pour cette épreuve.
Le langage de programmation choisi par le candidat doit être spécifié en tête
de la copie.
Ce polynôme est-il positif ?
Dans certains cas, la démonstration assistée par ordinateur demande de vérifier
des inégalités
polynomiales de la forme :
x [0, 1], x6 - 42x5 + 120x4 - 140x3 + 75x2 - 15x + 1 0
Ce problème étudie une technique basée sur les polynômes de Bernstein
permettant de démontrer
ce style d'inégalités automatiquement.
Les parties I et II traitent de nombres en précision arbitraire, respectivement
des entiers relatifs
et des nombres dyadiques. La partie III traite de listes que l'on peut
manipuler par les deux bouts.
Enfin, la partie IV introduit les polynômes de Bernstein et traite d'un moyen
de démontrer les
inégalités.
Les parties peuvent être traitées indépendamment. Mais attention, chaque partie
utilise des
notations et des fonctions introduites dans les parties précédentes. L'énoncé
utilise à plusieurs
reprises la formulation « on garantira l'invariant P sur le type ». On entend
par cela que les
fonctions que vous allez écrire peuvent supposer que la propriété P est vraie
pour leurs arguments
de type et qu'en contrepartie elles doivent produire des résultats de type
vérifiant la propriété
P . Si la logique de la fonction conduit à identifier des arguments de type «
impossibles », le code
du candidat peut échouer en appelant la fonction (procédure en Pascal) echouer
qui prend une
(courte) chaîne explicative en argument.
I. Grands entiers
Les nombres que nous allons manipuler nécessitent une précision qui dépasse
celle des entiers
de la machine (types int en Caml et integer en Pascal). Nous allons donc
commencer par définir
une arithmétique de précision arbitraire. On se donne pour cela une base de
calcul, par exemple
base = 10000. La valeur de base importe peu et on supposera seulement qu'elle
est paire, supérieure
ou égale à 2 et que son double n'excède pas le plus grand entier machine. Un
entier naturel de
précision arbitraire est alors représenté par la liste de ses chiffres en base
base, les chiffres les moins
significatifs étant en tête de liste. Ainsi la liste [1; 2; 3] représente
l'entier 1 + 2 × base + 3 × base2 .
On définit le type nat suivant pour de tels entiers :
1
(* Caml *)
let base = ... ; ;
type nat == int list ; ;
{ Pascal }
const base : integer = ... ;
type nat = ^cellule ; cellule = record
valeur : integer ; suite : nat ; end ;
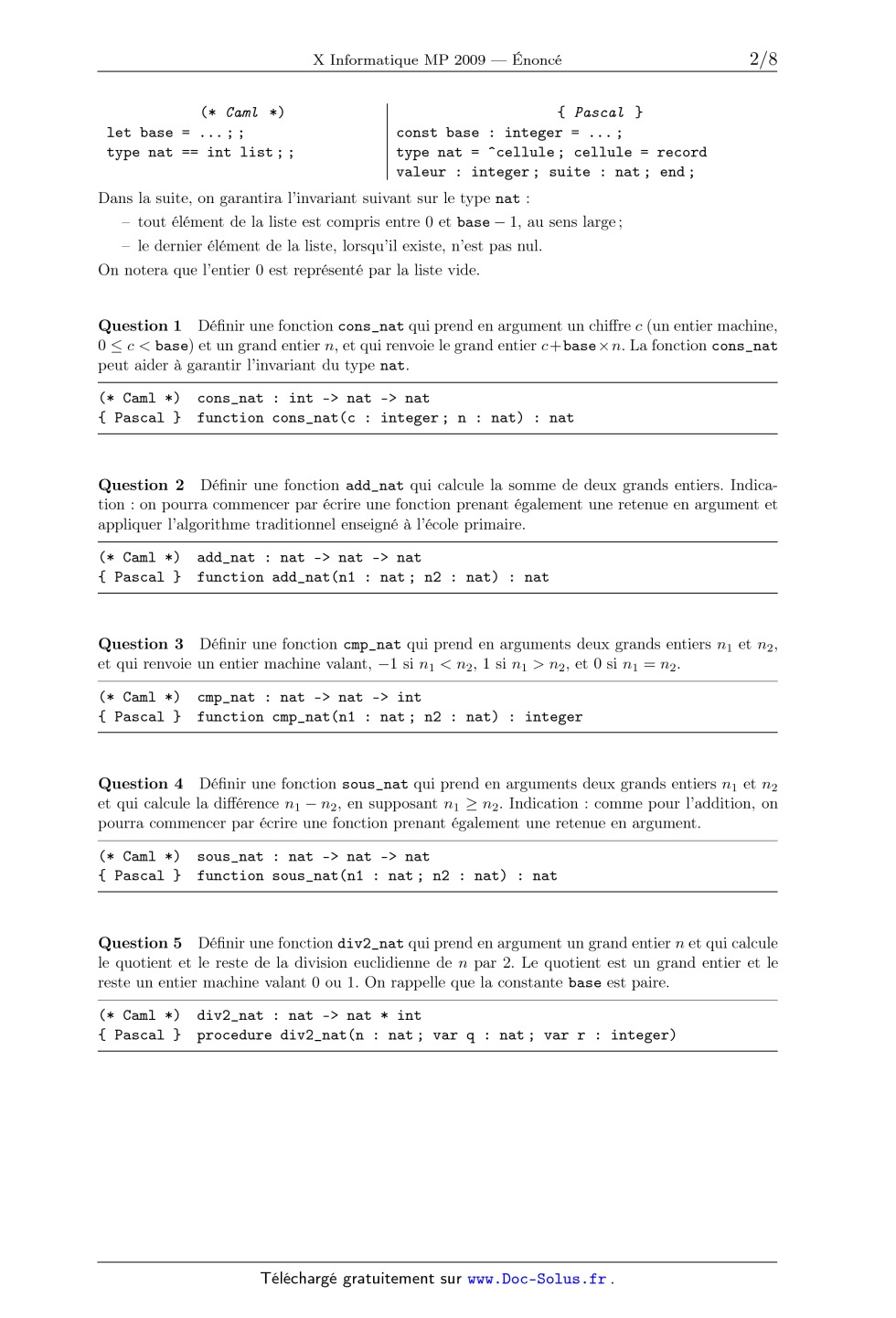
Dans la suite, on garantira l'invariant suivant sur le type nat :
tout élément de la liste est compris entre 0 et base - 1, au sens large ;
le dernier élément de la liste, lorsqu'il existe, n'est pas nul.
On notera que l'entier 0 est représenté par la liste vide.
Question 1 Définir une fonction cons_nat qui prend en argument un chiffre c (un
entier machine,
0 c < base) et un grand entier n, et qui renvoie le grand entier c+base×n. La fonction cons_nat peut aider à garantir l'invariant du type nat. (* Caml *) cons_nat : int -> nat -> nat
{ Pascal } function cons_nat(c : integer ; n : nat) : nat
Question 2 Définir une fonction add_nat qui calcule la somme de deux grands
entiers. Indication : on pourra commencer par écrire une fonction prenant
également une retenue en argument et
appliquer l'algorithme traditionnel enseigné à l'école primaire.
(* Caml *) add_nat : nat -> nat -> nat
{ Pascal } function add_nat(n1 : nat ; n2 : nat) : nat
Question 3 Définir une fonction cmp_nat qui prend en arguments deux grands
entiers n1 et n2 ,
et qui renvoie un entier machine valant, -1 si n1 < n2 , 1 si n1 > n2 , et 0 si
n1 = n2 .
(* Caml *) cmp_nat : nat -> nat -> int
{ Pascal } function cmp_nat(n1 : nat ; n2 : nat) : integer
Question 4 Définir une fonction sous_nat qui prend en arguments deux grands
entiers n1 et n2
et qui calcule la différence n1 - n2 , en supposant n1 n2 . Indication : comme
pour l'addition, on
pourra commencer par écrire une fonction prenant également une retenue en
argument.
(* Caml *) sous_nat : nat -> nat -> nat
{ Pascal } function sous_nat(n1 : nat ; n2 : nat) : nat
Question 5 Définir une fonction div2_nat qui prend en argument un grand entier
n et qui calcule
le quotient et le reste de la division euclidienne de n par 2. Le quotient est
un grand entier et le
reste un entier machine valant 0 ou 1. On rappelle que la constante base est
paire.
(* Caml *) div2_nat : nat -> nat * int
{ Pascal } procedure div2_nat(n : nat ; var q : nat ; var r : integer)
2
À partir de ces grands entiers naturels, on va maintenant construire de grands
entiers relatifs.
Pour cela, on introduit le type enregistrement z suivant, où le champ signe
contient le signe de
l'entier relatif, à savoir 1 ou -1, et le champ nat sa valeur absolue.
(* Caml *) type z = { signe: int; nat: nat };;
{ Pascal } type z = record signe: integer; nat: nat; end;
On notera que 0 admet deux représentations, ce qui n'est pas gênant par la
suite.
Question 6 Définir une fonction neg_z qui calcule la négation d'un grand entier
relatif.
(* Caml *) neg_z : z -> z
{ Pascal } function neg_z(z : z) : z
Question 7 Définir une fonction add_z qui calcule la somme de deux grands
entiers relatifs.
(* Caml *) add_z : z -> z -> z
{ Pascal } function add_z(z1 : z ; z2 ; z) : z
Question 8 Définir une fonction mul_puiss2_z qui prend en arguments un entier
machine
p (p 0), un grand entier relatif z, et qui renvoie le grand entier relatif 2p
z. On se contentera
d'une solution simple, sans viser particulièrement l'efficacité.
(* Caml *) mul_puiss2_z : int -> z -> z
{ Pascal } function mul_puiss2_z(p : integer ; z : z) : z
Question 9 Définir une fonction decomp_puiss2_z qui prend en argument un grand
entier relatif
z non nul, et qui renvoie un grand entier relatif u impair et un entier machine
p tels que z = 2p u.
Cette fonction calcule donc la plus grande puissance de 2 qui divise z et
renvoie la décomposition
correspondante. Comme ci-dessus, on visera la simplicité et on supposera que z
est tel que p est
bien représentable par un entier machine.
(* Caml *) decomp_puiss2_z : z -> z * int
{ Pascal } procedure decomp_puiss2_z(z : z ; var u : z ; var p : integer)
II. Nombres dyadiques
Un nombre dyadique est un nombre rationnel qui peut s'écrire sous la forme
a × 2b
avec a, b Z.
On note D l'ensemble des nombres dyadiques. On définit le type dya suivant pour
représenter les
nombres dyadiques :
3
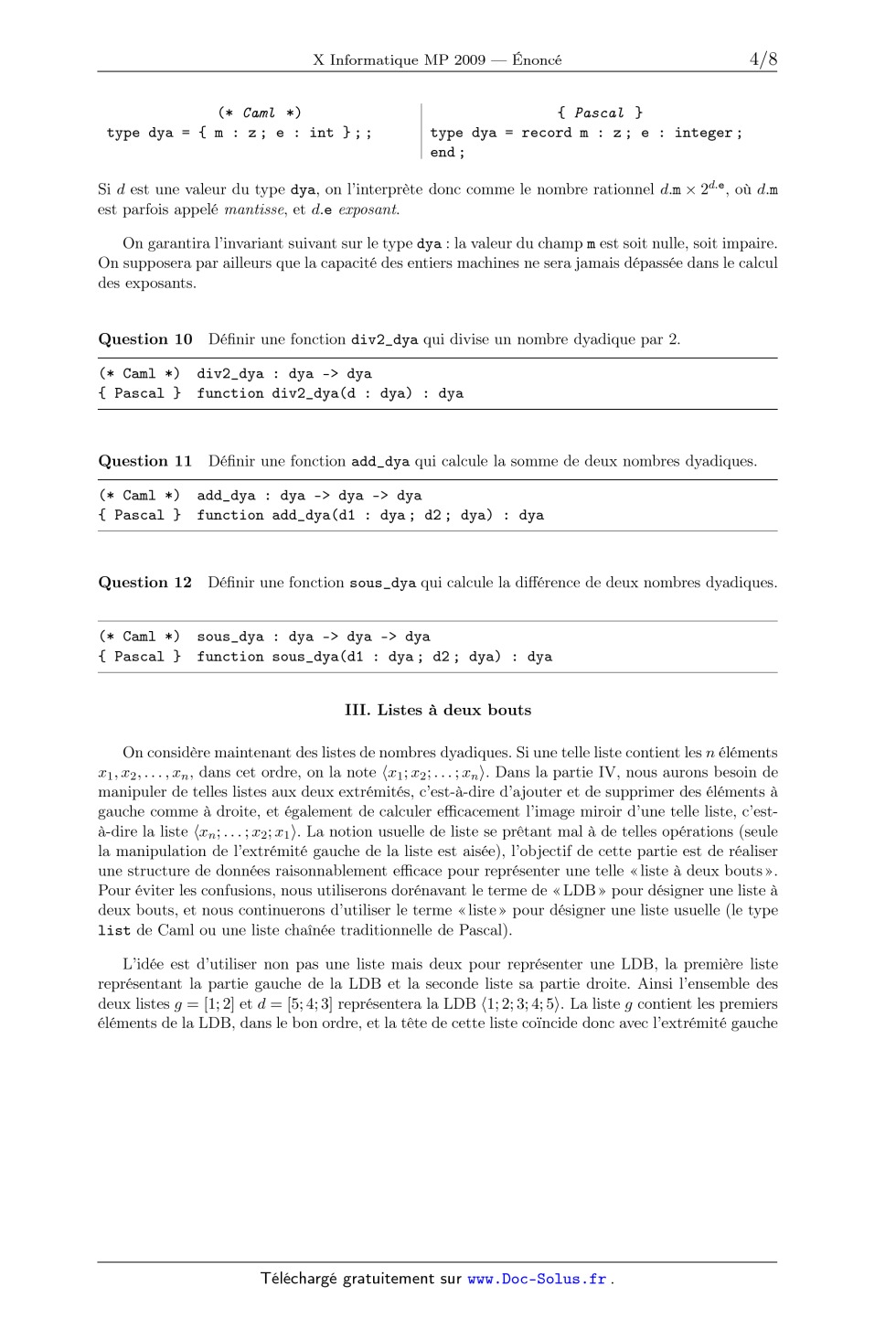
(* Caml *)
type dya = { m : z ; e : int } ; ;
{ Pascal }
type dya = record m : z ; e : integer ;
end ;
Si d est une valeur du type dya, on l'interprète donc comme le nombre rationnel
d.m × 2d.e , où d.m
est parfois appelé mantisse, et d.e exposant.
On garantira l'invariant suivant sur le type dya : la valeur du champ m est
soit nulle, soit impaire.
On supposera par ailleurs que la capacité des entiers machines ne sera jamais
dépassée dans le calcul
des exposants.
Question 10 Définir une fonction div2_dya qui divise un nombre dyadique par 2.
(* Caml *) div2_dya : dya -> dya
{ Pascal } function div2_dya(d : dya) : dya
Question 11 Définir une fonction add_dya qui calcule la somme de deux nombres
dyadiques.
(* Caml *) add_dya : dya -> dya -> dya
{ Pascal } function add_dya(d1 : dya ; d2 ; dya) : dya
Question 12 Définir une fonction sous_dya qui calcule la différence de deux
nombres dyadiques.
(* Caml *) sous_dya : dya -> dya -> dya
{ Pascal } function sous_dya(d1 : dya ; d2 ; dya) : dya
III. Listes à deux bouts
On considère maintenant des listes de nombres dyadiques. Si une telle liste
contient les n éléments
x1 , x2 , . . . , xn , dans cet ordre, on la note hx1 ; x2 ; . . . ; xn i. Dans
la partie IV, nous aurons besoin de
manipuler de telles listes aux deux extrémités, c'est-à-dire d'ajouter et de
supprimer des éléments à
gauche comme à droite, et également de calculer efficacement l'image miroir
d'une telle liste, c'està-dire la liste hxn ; . . . ; x2 ; x1 i. La notion
usuelle de liste se prêtant mal à de telles opérations (seule
la manipulation de l'extrémité gauche de la liste est aisée), l'objectif de
cette partie est de réaliser
une structure de données raisonnablement efficace pour représenter une telle «
liste à deux bouts ».
Pour éviter les confusions, nous utiliserons dorénavant le terme de « LDB »
pour désigner une liste à
deux bouts, et nous continuerons d'utiliser le terme « liste » pour désigner
une liste usuelle (le type
list de Caml ou une liste chaînée traditionnelle de Pascal).
L'idée est d'utiliser non pas une liste mais deux pour représenter une LDB, la
première liste
représentant la partie gauche de la LDB et la seconde liste sa partie droite.
Ainsi l'ensemble des
deux listes g = [1; 2] et d = [5; 4; 3] représentera la LDB h1; 2; 3; 4; 5i. La
liste g contient les premiers
éléments de la LDB, dans le bon ordre, et la tête de cette liste coïncide donc
avec l'extrémité gauche
4
de la LDB ; symétriquement, la liste d contient les derniers éléments de la
LDB, en ordre inverse,
et la tête de cette liste coïncide donc avec l'extrémité droite de la LDB.
On définit le type ldb suivant pour représenter les LDB :
(* Caml *)
type ldb = {
lg : int ; g : dya list ;
ld : int ; d : dya list } ; ;
{ Pascal }
type liste_dya = ^cell_ld ; cell_ld = record
dya : dya ; suite_ld : liste_dya ; end ;
type ldb = record
lg : integer ; g : liste_dya ;
ld : integer ; d : liste_dya ; end ;
On se donne une constante entière c 2 et on impose sur le type ldb les deux
invariants suivants :
Le champ lg contient la longueur de la liste g, et le champ ld celle de la
liste d.
(1)
lg c × ld + 1 et ld c × lg + 1
(2)
Toutes les questions de cette partie garantiront les invariants au sens précisé
dans l'introduction du
problème, la question 16 étant un peu particulière.
Question 13 Définir une fonction ldb_est_vide qui détermine si une LDB est vide.
(* Caml *) ldb_est_vide : ldb -> bool
{ Pascal } function ldb_est_vide(l : ldb) : boolean
Question 14 Définir une fonction premier_g qui renvoie l'élément le plus à
gauche d'une LDB,
i.e. telle que premier_g hx1 ; x2 ; . . . ; xn i = x1 . On supposera que la LDB
contient au moins un
élément.
(* Caml *) premier_g : ldb -> dya
{ Pascal } function premier_g(l : ldb) : dya
Question 15 Définir une fonction inverse_ldb qui inverse l'ordre des éléments
d'une LDB, i.e.
telle que inverse_ldb hx1 ; x2 ; . . . ; xn i = hxn ; . . . ; x2 ; x1 i.
(* Caml *) inverse_ldb : ldb -> ldb
{ Pascal } function inverse_ldb(l : ldb) : ldb
Question 16 Définir une fonction invariant_ldb qui vérifie si une LDB satisfait
bien l'invariant
(2) et le rétablit si ce n'est pas le cas. Plus précisément, la fonction
invariant_ldb renvoie son
argument inchangé lorsqu'il vérifie l'invariant et, dans le cas contraire,
renvoie une LDB de même
contenu vérifiant l'invariant. Attention, dans ce dernier cas, on demande un
coût de l'ordre de la
taille de la LDB. Indication : pour une LDB contenant éléments, la répartition
qui range les /2
premiers éléments dans la liste g satisfait (2). Enfin les candidats pourront
utiliser, sans les définir,
5
une fonction concatener qui concatène deux listes, ainsi qu'une fonction
inverser qui inverse une
liste.
concatener([x1 ; · · · ; xn ], [y1 ; · · · ; ym ]) = [x1 ; · · · ; xn ; y1 ; ·
· · ; ym ]
inverser([x1 ; x2 ; · · · ; xn ]) = [xn ; · · · ; x2 ; x1 ]
(* Caml *) invariant_ldb : ldb -> ldb
{ Pascal } function invariant_ldb(l : ldb) : ldb
Question 17 Définir une fonction ajoute_g qui ajoute un élément à gauche d'une
LDB, i.e. telle
que ajoute_g x hx1 ; x2 ; . . . ; xn i = hx; x1 ; x2 ; . . . ; xn i.
(* Caml *) ajoute_g : dya -> ldb -> ldb
{ Pascal } function ajoute_g(d : dya ; l : ldb) : ldb
Question 18 Définir une fonction enleve_g qui supprime l'élément le plus à
gauche dans une
LDB, i.e. telle que enleve_g hx1 ; x2 ; . . . ; xn i = hx2 ; . . . ; xn i. On
supposera que la LDB contient au
moins un élément.
(* Caml *) enleve_g : ldb -> ldb
{ Pascal } function enleve_g(l : ldb) : ldb
On supposera avoir écrit les fonctions symétriques opérant sur l'extrémité
droite de la LDB :
ajoute_d pour ajouter un élément à droite, premier_d pour obtenir l'élément le
plus à droite, et
enleve_d pour supprimer l'élément le plus à droite.
Question 19 Dans cette question, on suppose c = 3. On considère une LDB de
longueur N
obtenue en appliquant successivement N opérations ajoute_g à partir d'une LDB
vide. Quel est le
coût moyen de chaque opération ajoute_g ? On supposera que le coût de
l'opération invariant_ldb
est constant lorsque la LDB vérifie l'invariant (2) et proportionnel à la
longueur de la LDB lorsque
celle-ci est réarrangée.
IV. Polynômes de Bernstein
On considère les polynômes
sives :
B0
0
Bik
k
Bi
Bik définis, pour i, k Z, par l'ensemble suivant d'équations récur= 1
k-1
= (1 - X)Bik-1 + XBi-1
si 0 i k
= 0 si i < 0 ou i > k
On note que Bik est non nul si et seulement si 0 i k et que les Bik sont des
polynômes à
coefficients entiers.
6
Étant donnée une séquence de k + 1 nombres dyadiques p = hd0 ; . . . ; dk i, on
l'interprète comme
un polynôme à coefficients dyadiques, noté I(p), de la manière suivante :
def
I(hd0 ; . . . ; dk i) =
k
X
di Bik
i=0
Dans la suite de ce problème, on ne s'intéresse qu'à des polynômes qui
s'écrivent sous cette forme.
En particulier, quand on écrira « le polynôme p » on signifiera implicitement
que p est une LDB de
nombres dyadiques, de type ldb, interprétée comme le polynôme I(p). On
introduit donc le type
poly suivant pour les polynômes, comme un synonyme pour le type ldb des listes
à deux bouts de
nombres dyadiques :
(* Caml *) type poly == ldb;;
{ Pascal } type poly = ldb;
Pour un polynôme p = hd0 ; . . . ; dk i, on appelle k sa taille ; le polynôme
vide a la taille -1 par
convention. On suppose avoir écrit deux fonctions add_poly et sous_poly
calculant respectivement
la somme et la différence de deux polynômes de même taille, ainsi qu'une
fonction div2_poly
multipliant un polynôme par la fraction 1/2.
Question 20 Soit p = hd0 ; . . . ; dk i un polynôme. Montrer que si, pour tout
i, di est positif ou nul,
alors
x [0, 1], I(p)(x) 0
Montrer que la réciproque est fausse avec p = h2; -1; 2i.
Pour un polynôme p de taille k 0, on définit le polynôme derive p de taille k
- 1 par
def
derive p = sous_poly (enleve_g p) (enleve_d p)
Pour un polynôme p de taille k quelconque et c D, on définit le polynôme
integre c p de taille
k + 1 par
(
ajoute_g c ldb_vide
si p est vide
def
integre c p =
ajoute_g c (add_poly p (integre c (enleve_d p))) sinon
Où ldb_vide représente la LDB vide.
Enfin, pour un polynôme p de taille k quelconque, on définit les polynômes
raffine_g p et
raffine_d p, de taille k, par
(
ldb_vide
si p est vide
def
raffine_g p =
integre (premier_g p) (div2_poly (raffine_g (derive p))) sinon
et
def
raffine_d p = inverse_ldb (raffine_g (inverse_ldb p))
On admet alors les résultats suivants : pour tout polynôme p, on a
x, I(raffine_g p)(x) = I(p)(x/2)
(3)
x, I(raffine_d p)(x) = I(p)(1/2 + x/2)
(4)
et
7
Question 21 Un calcul donne raffine_g h2; -1; 2i = h2; 1/2; 1/2i et raffine_d
h2; -1; 2i =
h1/2; 1/2; 2i. Que peut-on en conclure ?
Question 22 Définir une fonction test_pos qui prend en argument un polynôme p
et qui est
une procédure de semi-décision pour la propriété x [0, 1], I(p)(x) 0. Une
procédure de semidécision termine toujours ; si elle renvoie vrai, alors la
propriété est vraie ; si elle renvoie faux, alors
on ne sait rien de la validité de la propriété. La procédure envisagée est du
style « diviser pour
régner », et on fixera une limite maximale sur la profondeur de décomposition,
au delà de laquelle
l'effort de preuve est abandonné. Il n'est pas démandé d'écrire le code des
fonctions raffine_g et
raffine_d, que l'on pourra donc appeler sans les définir.
(* Caml *) test_pos : poly -> bool
{ Pascal } function test_pos(p : poly) : boolean
Question 23 Montrer que pour tout polynôme p et tout nombre dyadique c on a les
égalités
suivantes :
raffine_g (c · p) = c · raffine_g p
raffine_d (c · p) = c · raffine_d p
Question 24 Montrer que la méthode ci-dessus est incomplète, c'est-à-dire qu'il
existe un polynôme p tel que x [0, 1], I(p)(x) 0, et tel que test_pos renvoie
faux quelle que soit la profondeur de décomposition. Indication : considérer p
= h1; -2; 4i, et admettre sans démonstration que
raffine_d (raffine_g p) = 1/16 p.
8