
Mines Physique 2 MP 2010
| Thème de l'épreuve | 574,8 kilomètres par heure! |
| Principaux outils utilisés | mécanique du point matériel, électrocinétique |
| Mots clefs | TGV, record de vitesse sur rail, rame test V150, accéléromètre, MEMS, caténaire |
Corrigé
:👈 gratuite pour tous les corrigés si tu crées un compte
👈 l'accès aux indications de tous les corrigés ne coûte que 1 € ⬅ clique ici
👈 gratuite pour tous les corrigés si tu crées un compte
- - - - - - - - - - - -
👈 gratuite pour ce corrigé si tu crées un compte
- - - - - - - - - - - - -
Énoncé complet
(télécharger le PDF)

Rapport du jury
(télécharger le PDF)
Énoncé obtenu par reconnaissance optique des caractères
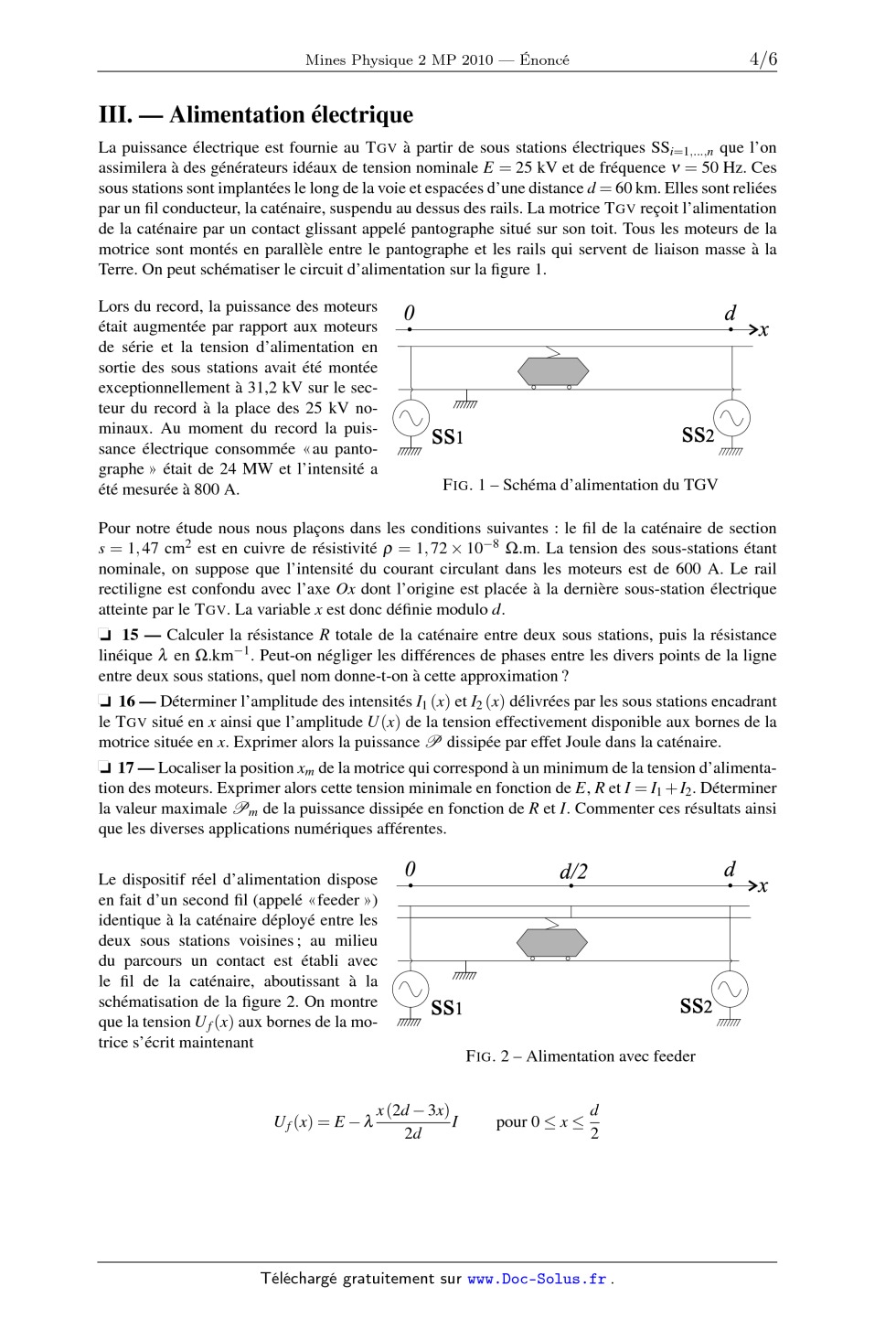
ECOLE DES PONTS PARISTECH SUPAERO (ISAE), ENSTA PARISTECH, TELECOM PARISTECH, MINES PARISTECH, MINES DE SAINTETIENNE, MINES DE NANCY, TELECOM BRETAGNE, ENSAE PARISTECH (FILIERE MP) ECOLE POLYTECHNIQUE (FILIERE TSI) CONCOURS D'ADMISSION 2010 SECONDE EPREUVE DE PHYSIQUE Filiere MP (Duree de l'epreuve: 3 heures) L'usage de la calculatrice est autorise Sujet mis a disposition des concours : Cycle international, ENSTIM, TELECOM INT, TPEEIVP Les candidats sont pries de mentionner de facon apparente sur la premiere page de la copie : PHYSIQUE II -- MP. L'enonce de cette epreuve comporte 6 pages. Si, au cours de l'epreuve, un candidat repere ce qui lui semble etre une erreur d'enonce, il est invite a le signaler sur sa copie et a poursuivre sa composition en expliquant les raisons des initiatives qu'il aura ete amene a prendre. Il ne faudra pas hesiter a formuler les commentaires (incluant des considerations numeriques) qui vous sembleront pertinents, meme lorsque l'enonce ne le demande pas explicitement. La bareme tiendra compte de ces initiatives ainsi que des qualites de redaction de la copie. 574,8 KILOMETRES PAR HEURE ! Le mardi 3 avril 2007, a 13 h 14, la S NCF, associee a Reseau Ferre de France ainsi qu'a la compagnie A LSTOM portait le record du monde de vitesse sur rail a la valeur de 574,8 km.h-1 au point kilometrique 194 de la ligne a grande vitesse est-europeenne, grace a la rame T GV Duplex V150 composee de deux motrices POS encadrant trois remorques. La remorque centrale etait equipee a chaque extremite de deux essieux moteurs AGV. Pour realiser cet exploit de nombreux parametres physiques et techniques ont ete etudies et optimises ; dans le probleme qui suit nous allons en examiner quelques uns. Les caracteristiques techniques du T GV, dont toutes ne sont pas utilisees dans le probleme, sont les suivantes : masse de la rame avec ses passagers MT = 270 tonnes ; longueur de la rame, LT = 106 m ; largeur de la rame, T = 2, 9 m ; hauteur de la rame, hT = 4, 1 m. Dans tout le probleme, la masse volumique de l'air sera constante et egale a a = 1, 3 kg.m-3 , et par souci de simplicite, dans les applications numeriques, on prendra g = 10 m.s-2 pour la valeur de l'acceleration de la pesanteur terrestre et on n'utilisera que 3 chiffres significatifs. 574,8 kilometres par heure ! I. -- Trajet en ligne droite Lors d'un essai realise durant la campagne prealable a la tentative de record sur une voie approximativement rectiligne et plus ou moins horizontale, on a releve les donnees suivantes t [s] -1 0 70 V km.h 0 150 95 200 124 250 155 300 231 350 263 332 400 450 1 -- Calculer sur chaque intervalle de mesure les valeurs de l'acceleration moyenne de la rame, on exprimera ces valeurs en m.s-2 dans un tableau recapitulatif. Estimer la distance parcourue necessaire pour atteindre la vitesse de 450 km.h-1 . 2 -- Un journaliste convie a cet essai avait apporte un petit pendule simple qu'il avait suspendu au plafond de la voiture. Il comptait, selon ses mots, « mettre en evidence la grande vitesse du train ». Quelle a ete, en regime permanent, l'inclinaison maximale du pendule par rapport a la verticale durant l'essai ? La rame repose sur les rails par l'intermediaire de seize essieux, dont douze moteurs, composes chacun de deux roues. La force moyenne appliquee par les rails sur chaque jante des roues motrices est appelee force de traction a la jante. 3 -- On suppose que les efforts sont egalement repartis sur chaque roue. Calculer la force de traction a la jante au demarrage. La loi empirique de Curtius et Kniffer (1943) exprime la variation du coefficient de frottement statique µ au contact roue-rail (rail sec et propre) en fonction du module V de la vitesse du train exprimee en km.h-1 . Elle affirme que µ = 0, 161 + 7, 5/(44 +V ). Montrer qu'il n'y avait pas de patinage possible des roues au demarrage de la rame. Lors du mouvement, un certain nombre de causes de frottements produisent une force resultante d'intensite R = A + BV + CV 2 qui s'oppose a la vitesse V du train. Cette intensite R est appelee resistance a l'avancement. Pour une rame T GV Duplex standard de 2 motrices et 8 remorques, la S NCF adopte, grace a des mesures effectuees jusqu'a des vitesses de 360 km.h-1 , les valeurs A = 2 700 N, B = 31, 8 N.km-1 .h et C = 0, 535 N.km-2 .h2 . On fait l'hypothese que l'on peut conserver ces valeurs pour des vitesses superieures. 4 -- La puissance totale des moteurs embarques lors du record etait de 19,6 MW. Cette puissance est-elle suffisante pour permettre a une rame T GV Duplex standard d'atteindre la vitesse du record precedent qui etait de 540 km.h-1 ? Pour le record vise, la rame T GV avait ete modifiee par rapport a une rame standard et notamment les diametres des roues avaient ete agrandis, passant de 920 mm a 1 092 mm. Quelle est la raison de cet agrandissement des roues ? 5 -- Pour la rame V150 du record qui ne comportait que 3 remorques et pour laquelle quelques modifications d'aerodynamisme avaient ete apportees, les parametres de la resistance a l'avancement sont A = 1700 N, B = 20, 1 N.km-1 .h et C = 0, 37 N.km-2 .h2 . Calculer la force de traction a la jante lors de l'essai du tableau de la question 1 a la vitesse de 450 km.h-1 . Existe-t-il un risque de patinage ? 6 -- Montrer que le record n'est possible que dans une zone de descente. Estimez la pente de celle-ci. Lors d'un essai dans la phase de preparation un incident a declenche le freinage d'urgence alors que la rame roulait a la vitesse Vo = 506 km.h-1 et la rame s'est immobilisee au bout de 15 km. 7 -- Quelle etait l'energie cinetique de la rame au moment du declenchement du freinage. Calculer la deceleration moyenne durant le freinage et la duree de ce freinage. Page 2/6 Physique II, annee 2010 -- filiere MP 8 -- Le protocole de freinage habituel comporte plusieurs phases. Dans la premiere on ouvre le disjoncteur, les moteurs sont alors en circuit ouvert, c'est la «marche sur l'erre ». Calculer la deceleration aux alentours de 500 km.h-1 pour la rame V150. On note x(t) la distance parcourue depuis l'ouverture du disjoncteur a l'instant t = 0. En ne considerant que le terme en V 2 dans la resistance a l'avancement et un parcours en terrain horizontal, exprimer x(t) en fonction de t, de la vitesse initiale Vo de la rame et de la duree = MT /(CVo ) dont on precisera la valeur numerique en secondes. On marche sur l'erre pour abaisser la vitesse a 400 km.h-1 . Quelle est la distance parcourue pendant cette marche ? 9 -- Dans une seconde phase, le fonctionnement de certains moteurs est inverse, chacun des quatre moteurs POS devient une dynamo connectee a une resistance RM = 0, 97 refroidie par un debit d'air important. Ce debit est adapte a la puissance de 900 kW degagee par effet Joule dans la resistance. Quelle est la deceleration dans cette deuxieme phase, autour de 400 km.h-1 ? La fin du freinage etait assuree par de classiques disques de frein sur les essieux non moteurs qui ont ete portes a plus de 800 C sans deformation ni usure anormale ! FIN DE LA PARTIE I II. -- Comportement en virage Sur le troncon de la voie d'essai, il y avait quelques virages. Dans la suite nous prendrons comme exemple le virage situe entre les points kilometriques 190 et 197 de la voie, de longueur d'arc s = 6 323 m et de rayon de courbure = 16 667 m tournant a gauche. Ce virage est parcouru a la vitesse constante de 540 km.h-1 . Les faces internes des rails sont distantes de r = 1 435 mm. Les centres de gravite des remorques sont approximativement situes a une hauteur h = 2, 5 m du rail. On considere dans un premier temps le cas hypothetique d'une voie sans devers, c'est-a-dire que les deux rails sont dans le meme plan horizontal. 10 -- La transition entre la voie rectiligne et la voie en virage se fait par l'intermediaire d'un troncon de raccordement parabolique de longueur 130 m. Quelle est la duree de cette phase de transition ? Qu'ont ressenti les passagers se tenant debout dans les voitures durant le franchissement du troncon de transition ? On traduira ces effets de facon quantitative en exprimant les valeurs extremes de la force ressentie par un passager de masse m p = 75 kg se tenant au centre du train. 11 -- On definit la secousse (traduction du terme anglo-saxon « jerk ») comme la derivee du vecteur acceleration par rapport au temps. Les normes habituelles des transports en commun limitent l'intensite des secousses acceptables a la valeur de 2 m.s-3 pour le confort des passagers. La secousse engendree par ce virage respecte-t-elle la norme de confort ? 12 -- Un verre d'eau pose sur la tablette devant un passager mettrait en evidence la force d'inertie presente dans le virage de deux manieres differentes. Lesquelles ? 13 -- A quelle vitesse maximale theorique le train peut-il parcourir le virage sans risque de decollement des roues ? En fait le virage est releve progressivement durant le troncon parabolique de raccordement. En sortie de ce dernier, le rail exterieur est sureleve d'une hauteur = 130 mm par rapport au rail interieur. Ce decalage persiste durant toute la phase a courbure constante, enfin, un troncon parabolique de sortie de virage permet de redescendre le rail exterieur a son niveau initial des le virage termine. 14 -- Quelles sont les ameliorations apportees par le devers par rapport a la situation de la question precedente ? Determiner, dans le referentiel de la rame, la norme ae de l'acceleration centrifuge subie par le passager. Quelle est l'indication du pendule du journaliste dont il est question dans la premiere partie durant le passage du virage ? FIN DE LA PARTIE II Page 3/6 Tournez la page S.V.P. 574,8 kilometres par heure ! III. -- Alimentation electrique La puissance electrique est fournie au T GV a partir de sous stations electriques SSi=1,...,n que l'on assimilera a des generateurs ideaux de tension nominale E = 25 kV et de frequence = 50 Hz. Ces sous stations sont implantees le long de la voie et espacees d'une distance d = 60 km. Elles sont reliees par un fil conducteur, la catenaire, suspendu au dessus des rails. La motrice T GV recoit l'alimentation de la catenaire par un contact glissant appele pantographe situe sur son toit. Tous les moteurs de la motrice sont montes en parallele entre le pantographe et les rails qui servent de liaison masse a la Terre. On peut schematiser le circuit d'alimentation sur la figure 1. Lors du record, la puissance des moteurs etait augmentee par rapport aux moteurs de serie et la tension d'alimentation en sortie des sous stations avait ete montee exceptionnellement a 31,2 kV sur le secteur du record a la place des 25 kV nominaux. Au moment du record la puissance electrique consommee «au pantographe » etait de 24 MW et l'intensite a ete mesuree a 800 A. F IG . 1 Schema d'alimentation du TGV Pour notre etude nous nous placons dans les conditions suivantes : le fil de la catenaire de section s = 1, 47 cm2 est en cuivre de resistivite = 1, 72 × 10-8 .m. La tension des sous-stations etant nominale, on suppose que l'intensite du courant circulant dans les moteurs est de 600 A. Le rail rectiligne est confondu avec l'axe Ox dont l'origine est placee a la derniere sous-station electrique atteinte par le T GV. La variable x est donc definie modulo d. 15 -- Calculer la resistance R totale de la catenaire entre deux sous stations, puis la resistance lineique en .km-1 . Peut-on negliger les differences de phases entre les divers points de la ligne entre deux sous stations, quel nom donne-t-on a cette approximation ? 16 -- Determiner l'amplitude des intensites I1 (x) et I2 (x) delivrees par les sous stations encadrant le T GV situe en x ainsi que l'amplitude U(x) de la tension effectivement disponible aux bornes de la motrice situee en x. Exprimer alors la puissance P dissipee par effet Joule dans la catenaire. 17 -- Localiser la position xm de la motrice qui correspond a un minimum de la tension d'alimentation des moteurs. Exprimer alors cette tension minimale en fonction de E, R et I = I1 + I2 . Determiner la valeur maximale Pm de la puissance dissipee en fonction de R et I. Commenter ces resultats ainsi que les diverses applications numeriques afferentes. Le dispositif reel d'alimentation dispose en fait d'un second fil (appele «feeder ») identique a la catenaire deploye entre les deux sous stations voisines ; au milieu du parcours un contact est etabli avec le fil de la catenaire, aboutissant a la schematisation de la figure 2. On montre que la tension U f (x) aux bornes de la motrice s'ecrit maintenant U f (x) = E - F IG . 2 Alimentation avec feeder x (2d - 3x) I 2d Page 4/6 pour 0 x d 2 Physique II, annee 2010 -- filiere MP 18 -- Calculer la tension U f aux bornes de la motrice en x = d/2, ainsi que sa valeur minimale. Representer sur un meme graphique les fonctions U et U f pour x [0, d]. Commenter le role du feeder. FIN DE LA PARTIE III IV. -- Instrumentation lors des essais Pour veiller a la securite et tirer des enseignements sur le comportement du materiel dans ces conditions extremes de vitesse, de nombreux capteurs (plus de 350, enregistrant plus de 500 parametres !) etaient disposes en divers endroits de la rame d'essai. Les informations de ces capteurs, dirigees vers la voiture R8 transformee en laboratoire scientifique, etaient analyses par une equipe composee d'une quarantaine de techniciens et ingenieurs. Pour detecter par exemple d'eventuelles vibrations ou instabilites significatives d'une entree en resonance, il est necessaire d'etudier le mouvement de diverses parties mobiles au cours de l'essai. On prendra comme exemple le mouvement de l'une des roues de la rame, l'etude consistera a relever en continu l'acceleration d'un point a la peripherie du disque constituant cette roue. On presente ici un modele d'accelerometre capacitif 1D de la famille des MEMS (Micro Electro Mechanical Systems) fixe sur une puce de 3 mm de cotes. La dimension typique du capteur lui meme est de 400µ m. Le reste de la puce est occupe par l'electronique associee. Le modele mecanique simplifie de l'accelerometre est represente sur la figure 3. Une masse m = 3 µ g, dite masse sismique, assimilable a un point materiel A est reliee a l'enveloppe du capteur par des micro poutres elastiques de coefficient de raideur k = 0, 17 N.m-1 . Elles contraignent le mouvement de A dans une direction fixe Oz par rapport au boitier. F IG . 3 Schema de l'accelerometre Un amortissement a frottement visqueux proportionnel a la vitesse de A par rapport au boitier et de coefficient f = 6, 8 µ N.m-1 .s est assure par un gaz comprime dans le boitier etanche. On note zA la position de A et zB la position d'un point de reference du boitier du capteur rigidement fixe au systeme dont on veut mesurer l'acceleration. On prendra zA = zB au repos et on notera z = zA - zB . Deux condensateurs plans C1 et C2 sont formes par deux armatures fixes 1 et 2 liees au boitier et par l'armature mobile 0 liee a A. La distance entre les deux armatures fixes sera notee 2e (on prendra e = 50 µ m pour les applications numeriques) et la surface de chacune des armatures est S. Au repos l'armature 0 est a egale distance de 1 et 2 . On rappelle que les roues du T GV record ont un rayon rt = 546 mm. La puce est quant a elle implantee sur la face interieure d'une roue (supposee plane verticale) de l'une des remorques. Elle est fixee a une distance rb = 540 mm de l'axe de rotation de la roue, de plus l'axe Oz du boitier du capteur est confondu avec un rayon de la roue. IV.A. -- Analyse mecanique 19 -- Etablir l'equation differentielle verifiee par z.qOn notera aB la composante de l'acceleration du boitier sur Oz, on utilisera les parametres o = numeriques et l'on tiendra compte du poids de A. k m, = f 2mo dont on precisera les valeurs 20 -- On considere un roulement sans glissement de la roue sur un rail horizontal a la vitesse constante de V = 540 km.h-1 . Determiner la composante sur Oz de l'acceleration communiquee au boitier. On notera aB0 cette composante. Page 5/6 Tournez la page S.V.P. 574,8 kilometres par heure ! 21 -- S'il y avait un defaut de surface sur la jante de la roue, a quelle pulsation la perturbation de l'acceleration locale se manifesterait-elle ? On notera cette perturbation aB1 (t) = A1 cos( t). 22 -- Calculer la valeur numerique du temps caracteristique d'amortissement des oscillations. En deduire que l'on pourra, par la suite, se placer en regime permanent. 23 -- Determiner, en regime permanent, la reponse z(t) du capteur dans le cas d'un roulement sans glissement d'une roue possedant un defaut de surface sur un rail horizontal a la vitesse constante de V = 540 km.h-1 . IV.B. -- Signal electrique de sortie 24 -- On rappelle que la capacite d'un condensateur plan dont les armatures de surface S sont separees d'une distance d est C = S/d ou est la permittivite du milieu. Exprimer les capacites C1 et C2 du modele simplifie du capteur dans le cas z 6= 0. Le premier element de l'electronique du capteur peut etre modelise par le schema electrique equivalent represente sur la figure 4. Les generateurs ideaux de tension sont tels que e1 (t) = E sin(1t) et e2 (t) = -E sin(1t) avec E = 1 V et 1 = 2 · 105 rad.s-1 . 25 -- Etablir l'expression de Va (t) en fonction de C1 , C2 , e1 et e2 , puis mettre cette expression sous la forme d'un signal sinusoidal de pulsation 1 . Comment varie l'amplitude de ce signal ? La seconde partie de l'electronique du capteur construit le signal de mesure Vm (t) a partir de Va (t) selon le schema de F IG . 4 Schema equivalent du capteur la figure 5 F IG . 5 Traitement du signal du capteur Le signal de modulation e3 (t) = E sin(1t + ) est combine par le premier etage avec Va pour obtenir Va (t) × e3 (t) . Le filtre passe-bas possede une pulsation de coupure egale a 1 . V2 (t) = E 26 -- Donner l'expression de V2 (t) sous la forme d'une somme de deux termes sinusoidaux. En deduire la tension V3 (t). Determiner la valeur de permettant d'obtenir la tension la plus grande, c'est-a-dire la sensibilite du capteur la plus elevee possible. 27 -- On souhaite obtenir une variation de Vm de 10mV pour une variation de l'acceleration du boitier egale a celle de la pesanteur terrestre g. Quelle valeur faut-il attribuer au facteur d'amplification en tension Av de l'amplificateur de sortie ? Proposer un montage permettant cette sensibilite. FIN DE LA PARTIE IV FIN DE L'EPREUVE Page 6/6