
X/ENS Physique MP 2022
| Thème de l'épreuve | Flexion et flambage de systèmes mécaniques |
| Principaux outils utilisés | Mécanique du point, mécanique des solides |
| Mots clefs | Flambage, dipôle magnétique, mécanique, stabilité, milieux continus |
Corrigé
:👈 gratuite pour tous les corrigés si tu crées un compte
👈 l'accès aux indications de tous les corrigés ne coûte que 1 € ⬅ clique ici
👈 gratuite pour tous les corrigés si tu crées un compte
- - - - - - - - - - - - - - - - - - - - - -
👈 gratuite pour ce corrigé si tu crées un compte
- - - - - - - - - - - - - - - - - - - - -
Énoncé complet
(télécharger le PDF)



Rapport du jury
(télécharger le PDF)
Énoncé obtenu par reconnaissance optique des caractères
ÉCOLE POLYTECHNIQUE
ÉCOLES NORMALES SUPÉRIEURES
CONCOURS D'ADMISSION 2022
MERCREDI 27 AVRIL 2022
08h00 -- 12h00
FILIÈRE MP --- Épreuve n°5
PHYSIQUE (XULSR)
Durée : 4 heures
L'utilisation de calculatrices n'est pas autorisée pour cette épreuve.
10
15
20
25
30
Flexion et flambage de systèmes mécaniques
Nous nous proposons d'étudier quelques phénomènes mettant en oeuvre les
propriétés d'élasticité de flexion
de systèmes mécaniques particuliers. Dans une première partie, le système
mécanique est une chaîne formée
par un chapelet d'aimants sphériques. La cohésion de la chaîne est assurée par
l'attraction magnétique que
les aimants exercent les uns sur les autres. Dans une deuxième partie, la
chaîne d'aimants est remplacée par
une lame flexible. Dans ces deux situations, il s'agira de relier la hauteur
maximale que peuvent atteindre la
chaîne et la lame, érigées en édifice vertical, à leurs caractéristiques
géométriques et mécaniques. La dernière
partie est consacrée à la caractérisation des modes de vibration d'un verre
apparaissant lors du passage d'un
doigt humide sur son bord. Ces trois parties sont, en grande partie,
indépendantes.
--+ Les applications numériques seront effectuées avec la précision qu'un
calcul à la main permet aisément, et
sans excéder deux chiffres significatifs. Les ordres de grandeur seront donnés
avec un seul chiffre significatif.
--+ Les réponses aux questions relevant de considérations qualitatives devront
être systématiquement argu-
mentées.
--+ Les références des questions abordées devront être indiquées de façon
claire.
1 Chaîne d'aimants en interaction magnétique.
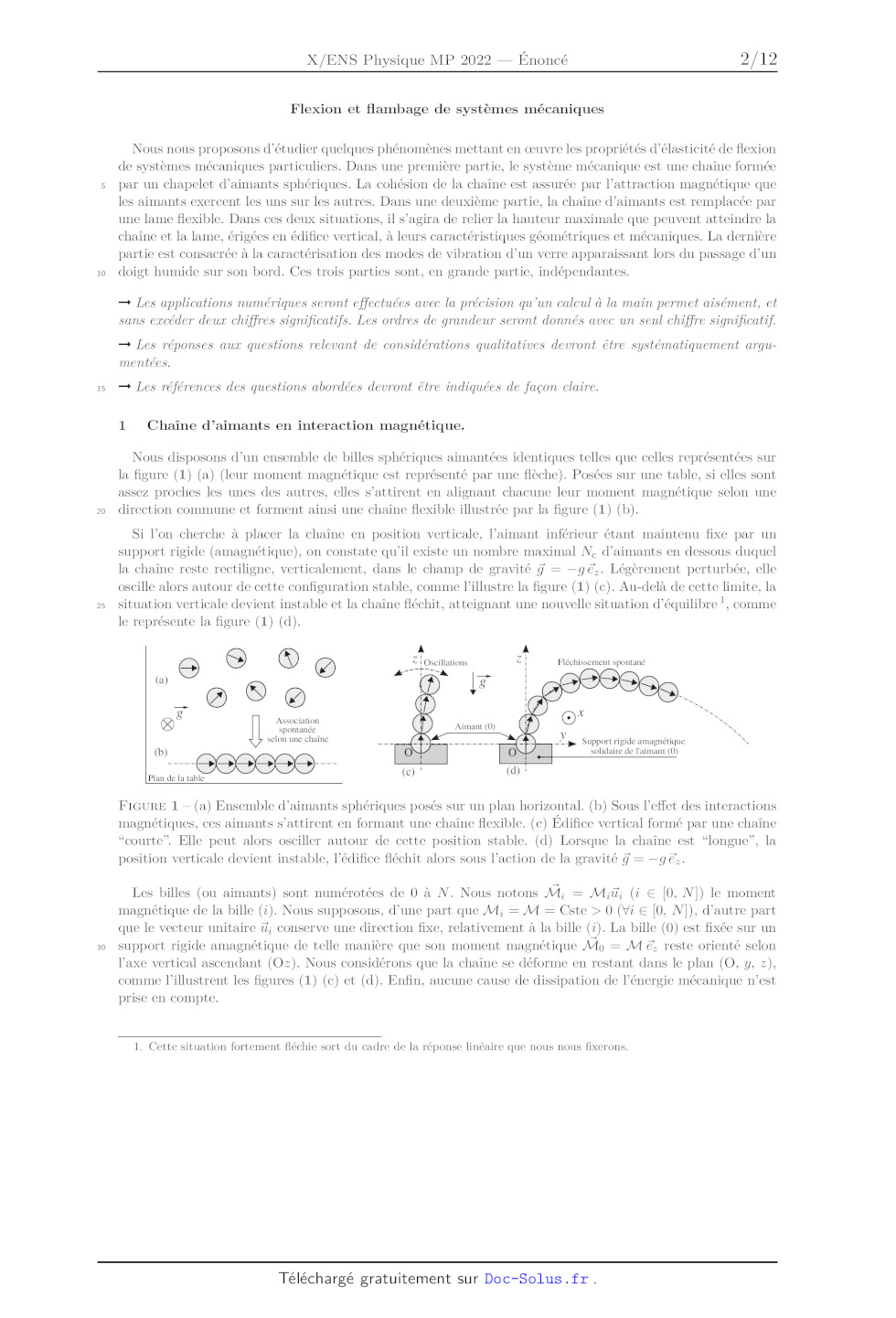
Nous disposons d'un ensemble de billes sphériques aimantées identiques telles
que celles représentées sur
la figure (1) (a) (leur moment magnétique est représenté par une flèche).
Posées sur une table, si elles sont
assez proches les unes des autres, elles s'attirent en alignant chacune leur
moment magnétique selon une
direction commune et forment ainsi une chaîne flexible illustrée par la figure
(1) (b).
Si l'on cherche à placer la chaîne en position verticale, l'aimant inférieur
étant maintenu fixe par un
support rigide (amagnétique), on constate qu'il existe un nombre maximal N°
d'aimants en dessous duquel
la chaîne reste rectiligne, verticalement, dans le champ de gravité 9 = --ge,.
Légèrement perturbée, elle
oscille alors autour de cette configuration stable, comme l'illustre la figure
(1) (c). Au-delà de cette limite, la
situation verticale devient instable et la chaîne fléchit, atteignant une
nouvelle situation d'équilibre |, comme
le représente la figure (1) (d).
À
eo Es) (X) @?) £ i Oscillations £ Fléchissement spontané
« G
_@9o@ { "
SQ ë Association î
spontanée Aimant (0)
A . . Lys
selon une chaîne À \Æ à/4 Y »> Support rigide amagnétique
O | OL". | solidaire de l'aimant (0)
(b) '
0). Es a _Z
Plan de la table
FIGURE 1 -- (a) Ensemble d'aimants sphériques posés sur un plan horizontal. (b)
Sous l'effet des interactions
magnétiques, ces aimants s'attirent en formant une chaîne flexible. (c) Édifice
vertical formé par une chaîne
"courte". Elle peut alors osciller autour de cette position stable. (d) Lorsque
la chaîne est "longue", la
position verticale devient instable, l'édifice fléchit alors sous l'action de
la gravité g = --ge,.
Les billes (ou aimants) sont numérotées de 0 à N. Nous notons M; = Mi, (à EUR
[0, N]) le moment
magnétique de la bille (4). Nous supposons, d'une part que M; = M = Cste > 0
(Vi EUR [0, N|), d'autre part
que le vecteur unitaire ü; conserve une direction fixe, relativement à la bille
(4). La bille (0) est fixée sur un
support rigide amagnétique de telle manière que son moment magnétique Mo = M ë,
reste orienté selon
l'axe vertical ascendant (Oz). Nous considérons que la chaîne se déforme en
restant dans le plan (O, y, 2),
comme l'illustrent les figures (1) (c) et (d). Enfin, aucune cause de
dissipation de l'énergie mécanique n'est
prise en compte.
1. Cette situation fortement fléchie sort du cadre de la réponse linéaire que
nous nous fixerons.
-- Page 1/11 -
35
40
45
50
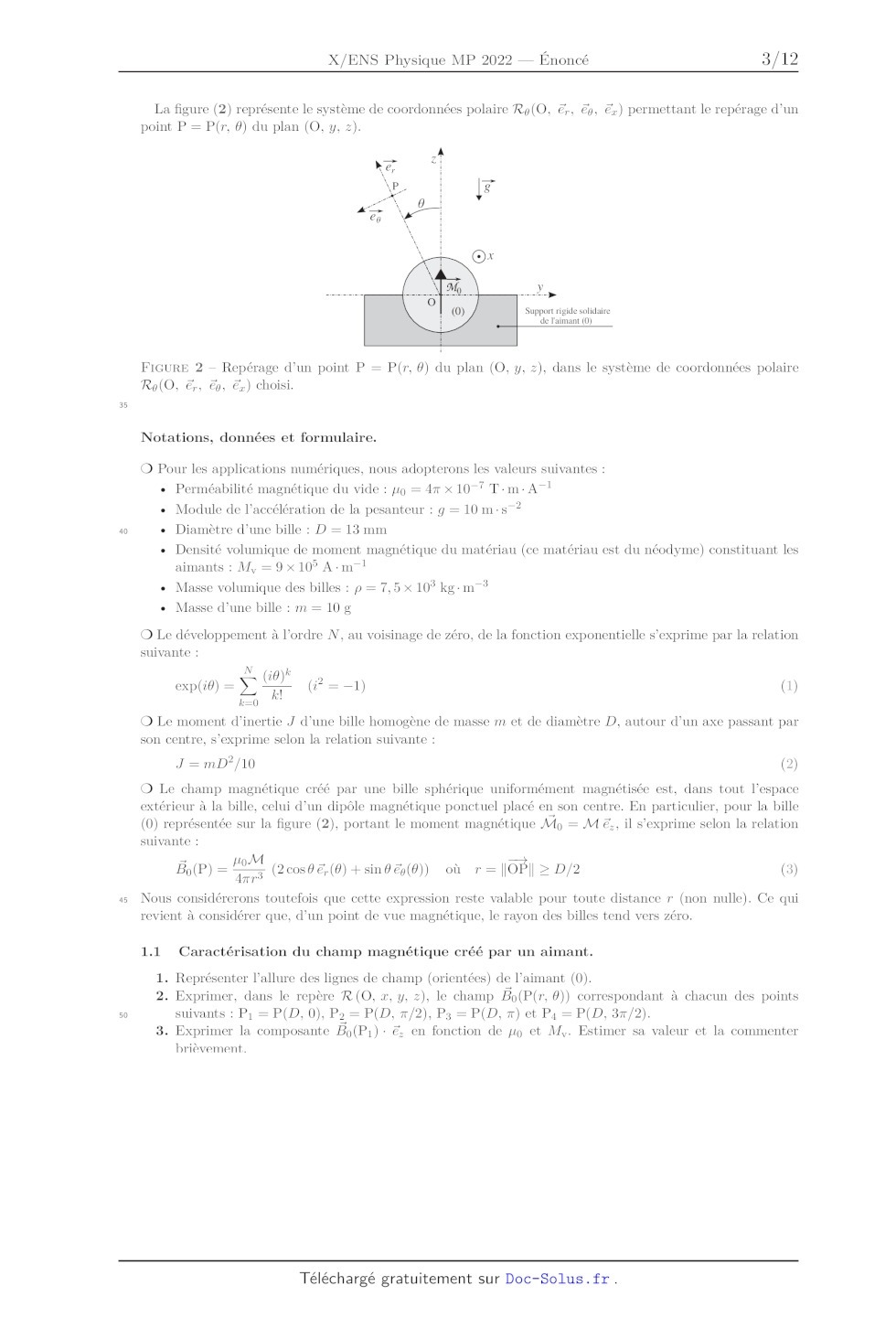
La figure (2) représente le système de coordonnées polaire Ro(O, EUR, ep, x)
permettant le repérage d'un
point P = Pr, 0) du plan (O, y, 2).
ha
\ \P 1H
_ ,
Ty
Support rigide solidaire
de l'aimant (0)
FIGURE 2 -- Repérage d'un point P = Pr, 4) du plan (O, y, z), dans le système
de coordonnées polaire
Ro(O, ë,, EUR, Ex) choisi.
Notations, données et formulaire.
O Pour les applications numériques, nous adopterons les valeurs suivantes :
+ Perméabilité magnétique du vide : 9 = 47 X 107* T:m:A
+ Module de l'accélération de la pesanteur : 9 =10m:s *
e Diamètre d'une bille : D = 13 mm
e Densité volumique de moment magnétique du matériau (ce matériau est du
néodyme) constituant les
aimants : M, = 9 x 10° Am !
° Masse volumique des billes : p = 7,5 x 10° kg:m *
e Masse d'une bille : m = 10 £g
O Le développement à l'ordre N, au voisinage de zéro, de la fonction
exponentielle s'exprime par la relation
suivante :
N f:n\k
(0) 2
exp(i8) => 5 (= -1) (1)
k=--0
O Le moment d'inertie J d'une bille homogène de masse m et de diamètre D,
autour d'un axe passant par
son centre, s'exprime selon la relation suivante :
J = mD°/10 (2)
O Le champ magnétique créé par une bille sphérique uniformément magnétisée est,
dans tout l'espace
extérieur à la bille, celui d'un dipôle magnétique ponctuel placé en son
centre. En particulier, pour la bille
(0) représentée sur la figure (2), portant le moment magnétique Mo = M EUR, il
s'exprime selon la relation
suivante :
Bo(P) = bo (2cos0ë,(0) + sin0EURe9(0)) où r = IOÉ| > D/2 (3)
Nous considérerons toutefois que cette expression reste valable pour toute
distance r (non nulle). Ce qui
revient à considérer que, d'un point de vue magnétique, le rayon des billes
tend vers zéro.
1.1 Caractérisation du champ magnétique créé par un aimant.
1. Représenter l'allure des lignes de champ (orientées) de l'aimant (0).
2. Exprimer, dans le repère R(O, x, y, z), le champ Bo(P(r, Ô)) correspondant à
chacun des points
suivants : P1 = P(D, 0), Po = P(D, x/2), P3 = P(D, ») et Pa = P(D, 3x/2).
3. Exprimer la composante Bo(P1) - EUR, en fonction de uo et M,. Estimer sa
valeur et la commenter
brièvement.
-- Page 2/11 -
1.2
Maiïillon formé de deux billes.
Nous plaçons la bille (1) sur la bille fixe (0), comme le représente la figure
(3) (a). Par interaction
55 magnétique, l'aimant (0) exerce alors sur l'aimant (1) une force ainsi qu'un
moment. Ce dernier tend à
aligner Mi; selon Mo. La force d'attraction entre les aimants est suffisamment
forte pour que nous puissions
considérer, d'une part que les aimants restent toujours en contact (V0 EUR
[--7, +x]), d'autre part que le
roulement de l'aimant (1) sur l'aimant (0), lorsqu'il se produit, s'effectue
sans glissement. L'angle 0 suffit
alors à caractériser la situation de la bille (1) (se reporter la figure (3)
(b)).
À
Y
(a) (b)
FIGURE 3 -- (a) La bille (1) est posée sur la bille (0) fixe. (b) La situation
de la bille (1) est caractérisée par
les angles 0 et 01 = 01(6).
6 [J Nous associons l'origine des énergies potentielles à la configuration
représentée sur la figure (3) (a), choisie
comme référence.
À.
65
En remarquant que les points I et 11, représentés sur la figure (3) (b),
étaient initialement confondus
(c'est-à-dire pour 0 = 0), justifier que 41 = 26.
. Etablir l'inventaire des actions mécaniques qui s'exercent sur l'aimant (1).
Il ne s'agit que d'un inven-
taire, on ne cherchera donc pas à expliciter chacune de ces actions mécaniques.
. Justifier que l'énergie mécanique du système {(0), (1)} (en interaction
gravitationnelle avec la Terre)
est conservée.
. Exprimer, en fonction de M et de l'angle 0, le moment magnétique M, dans la
base polaire (Er, Ep, Ex).
8. Exprimer l'énergie potentielle magnétique E3 de couplage entre les dipôles
Mo et M1. Nous l'écrirons
70 9.
75
10.
sous la forme suivante :
1
Es = >K (sin 0) (1)
Le paramètre Æ est une constante positive que l'on exprimera en fonction de 0,
M, et D.
Lors du roulement de la bille (1) sur la bille (0) (fixe), le centre de masse
O1 de la bille (1) décrit un
arc de cercle de rayon D et d'angle au centre égal à @ (se reporter à la figure
(3) (b)). Ce mouvement
s'accompagne, parallèlement, de la rotation de l'angle 41 de la bille (1),
déterminé en réponse à la
question (4).
Exprimer l'énergie cinétique Æ,1 de la bille (1), somme des énergies cinétiques
associées à chacune des
composantes de mouvement que nous venons de présenter. On exprimera ce résultat
en fonction de m,
D, JT, 0 et O1.
Nous écrivons l'énergie E41 sous la forme suivante :
1 ! A2
Ec -- 57 Ü (5)
Exprimer J' en fonction de la masse m et du diamètre D.
-- Page 3/11 -
80
85
90
95
100
110
11. Exprimer, en fonction des paramètres m, g, D et de l'angle 6, l'énergie
potentielle gravitationnelle £,;
de la bille (1) dans la situation représentée sur la figure (3) (b).
12. Représenter, sur un graphe commun, l'allure graphique de la dépendance
(qualitativement), vis-à-vis
de l'angle 0, de chacune des énergies potentielles £3 et E1, pour 0 EUR [---T,
+x] (c'est-à-dire sans tenir
compte de la présence du support maintenant la bille (0)). Analyser ces
résultats.
13. Établir l'équation différentielle vérifiée par l'angle 0. On conservera les
paramètres X, m, g, D et J!.
14. Déterminer à quelle condition la configuration correspondant à 9 -- 0 est
stable (ou métastable?). On
fera porter cette condition sur le paramètre $S défini par le rapport suivant :
s = © (6)
mgD
On proposera une interprétation physique de ce rapport.
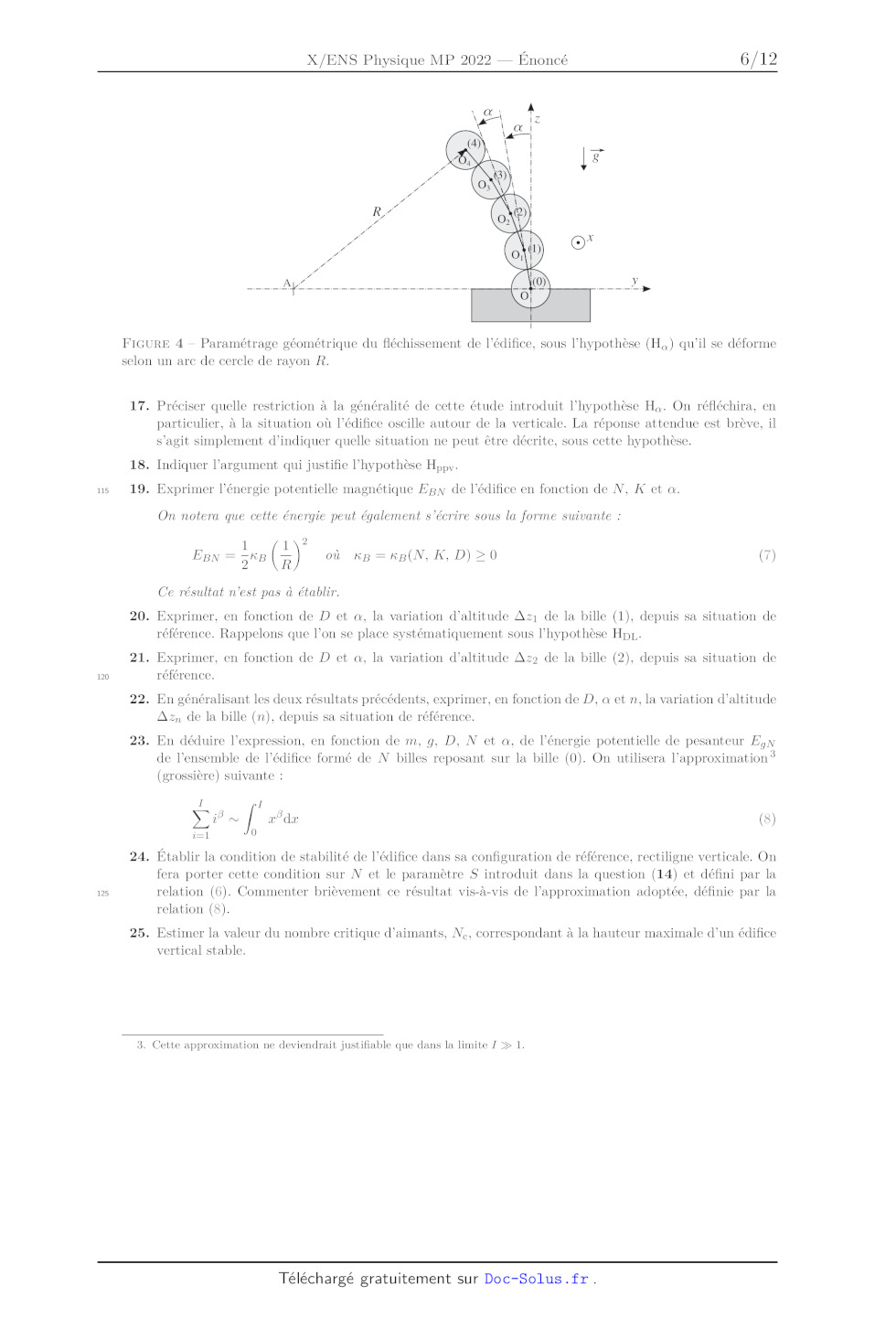
15. Pour les valeurs des paramètres adoptées nous obtenons $ < 100. Conclure quant à l'état de stabilité de la configuration correspondant à 0 = 0. 16. Exprimer, en tenant compte de la valeur du paramètre S, la pulsation w, des oscillations de la bille (1) autour de la configuration correspondant à 0 = 0, dans l'approximation linéaire. On exprimera cette pulsation en fonction de $, g et D. Estimer la valeur de la fréquence f, correspondante. 1.3 Édifice formé de !\ billes. Nous considérons un édifice, constitué de N aimants, reposant sur l'aimant fixe (0), comme le représente la figure (1) (c) pour N = 8. Il s'agit d'étudier la stabilité de cet édifice dans la configuration rectiligne verticale. Cette étude est conduite dans le cadre suivant : Ü Nous nous plaçons dans des situations nous permettant de considérer que l'angle formé par les deux segments successifs reliant le centre O; de l'aimant (i) aux centres de ses voisins (i -- 1) et (i+1) ne dépend pas de à (hypothèse référencée H,,). Cet angle, défini sur la figure (4), est noté a. Les centres O; des billes se situent alors sur un arc de cercle de centre A et de rayon noté À (R est une grandeur algébrique, du signe de a). Sous l'hypothèse H,,, le problème à N solides est réduit à un problème à un seul degré de liberté que l'on peut choisir comme étant l'angle &. Naturellement, cet angle et, corrélativement, le rayon À, dépendent du temps t lorsque l'édifice oscille ou fléchit. Ü Nous considérons que l'interaction magnétique se limite aux deux plus proches voisins de chaque aimant (hypothèse référencée H,,,v). ( Comme dans la sous-section (1.2), nous supposons que le roulement de chaque bille (4) sur la bille (à -- 1) n'est accompagné d'aucun glissement. ( Nous supposons que |[Na| & 1 (hypothèse référencée Hpr). Tous les résultats seront alors donnés à l'ordre le plus bas non nul, vis-à-vis de l'angle «. ( Nous associons l'origine des énergies potentielles à la configuration de référence correspondant à un édifice rectiligne vertical. 2. C'est-à-dire stable que sur un certain intervalle autour de 0 = 0. -- Page 4/11 - \ OE À z #4; a \ \a-- OS ne 5 | | g f \ rs O; à \ 7 \ \ Re NT, 7° ù X FT O; o ° (0) ° y FIGURE 4 -- Paramétrage géométrique du fléchissement de l'édifice, sous l'hypothèse (H,) qu'il se déforme selon un arc de cercle de rayon À. 17. Préciser quelle restriction à la généralité de cette étude introduit l'hypothèse H,,. On réfléchira, en 18. 115 19. 20. 21. 120 22. 23. 24. 125 25. particulier, à la situation où l'édifice oscille autour de la verticale. La réponse attendue est brève, il s'agit simplement d'indiquer quelle situation ne peut être décrite, sous cette hypothèse. Indiquer l'argument qui justifie l'hypothèse H,,,,. Exprimer l'énergie potentielle magnétique EZN de l'édifice en fonction de N, K et a. On notera que cette énergie peut également s'écrire sous la forme suivante : 1 1 \* EBN = -KB (%) où Kkp =KB(N, K, D)>0
2 R ()
Ce résultat n'est pas à établir.
Exprimer, en fonction de D et @, la variation d'altitude Az; de la bille (1),
depuis sa situation de
référence. Rappelons que l'on se place systématiquement sous l'hypothèse Hpr.
Exprimer, en fonction de D et @, la variation d'altitude Az2 de la bille (2),
depuis sa situation de
référence.
En généralisant les deux résultats précédents, exprimer, en fonction de D, à et
n, la variation d'altitude
Azn de la bille (n), depuis sa situation de référence.
En déduire l'expression, en fonction de m, g, D, N et à, de l'énergie
potentielle de pesanteur EN
de l'ensemble de l'édifice formé de N billes reposant sur la bille (0). On
utilisera l'approximation *
(grossière) suivante :
(8)
Établir la condition de stabilité de l'édifice dans sa configuration de
référence, rectiligne verticale. On
fera porter cette condition sur N et le paramètre $S introduit dans la question
(14) et défini par la
relation (6). Commenter brièvement ce résultat vis-à-vis de l'approximation
adoptée, définie par la
relation (3).
Estimer la valeur du nombre critique d'aimants, Ne, correspondant à la hauteur
maximale d'un édifice
vertical stable.
3. Cette approximation ne deviendrait justifiable que dans la limite I > 1.
-- Page 5/11 -
130
135
140
145
150
2 Instabilité de flambage d'une lame.
Nous nous proposons de définir les conditions d'apparition du fléchissement
d'une lame élastique souple,
érigée en position verticale, sous l'action de son propre poids. Ce phénomène
est une instabilité dite de
flambage.
2.1 Caractérisation du comportement élastique du matériau.
Nous considérons un barreau homogène de longueur a, lorsqu'il n'est soumis à
aucune force, et de section
droite S. Sous l'action de deux forces (--F", +F') appliquées à ses extrémités,
selon son axe (A), sa longueur
s'accroît (algébriquement) de u, comme le représente la figure (5).
À À A
Section S B' F
À À
U
B
À
a !
a
Y Y
A A'l --
_F
Y
--
FIGURE 5 -- Allongement (algébrique) u d'un barreau (a, S) soumis à deux
efforts axiaux (--Æ, +F). Les
points À et À' ont été ramenés dans le même plan perpendiculaire à l'axe (A).
Dans l'approximation linéaire, l'élongation u et la composante F de la force
F=F e\A sont liées par la
relation suivante (il s'agit de la loi de HOOKE) :
y
S
= o)
La constante réelle positive Y représente le module de YOUNG du matériau
constituant le barreau.
26. Indiquer à quelle condition l'approximation linéaire associée à la loi de
HOOKE se justifie.
27. Établir l'expression de l'énergie potentielle d'origine élastique Ey
emmagasinée par le barreau au
cours de l'évolution de sa longueur de a à a = a + u (selon les notations de la
figure (5)). On
exprimera ce résultat en fonction des paramètres Y, $, a et de l'allongement u.
2.2 Étude du flambage.
La lame, de masse volumique uniforme p, se présente sous la forme d'un
parallélépipède occupant le
volume |[---b/2, +b/2] x [---e/2, +e/2] x [0, L|, relativement au repère R (O,
x, y, z), comme le représente la
figure (6) (a) (lame non déformée). Elle n'est soumise qu'au champ de pesanteur
ÿ = --ge, et à l'action de
son support qui maintient sa base rigidement encastrée (z < 0). Comme dans le cas de la chaîne de billes (sous-section (1.3)), nous considérons que la lame se déforme dans le plan (O, y, z) et selon un arc de cercle dont nous notons À le centre et R le rayon (se reporter à la figure (7)). La figure (6) (b) représente la lame ainsi fléchie. Le déplacement de son extrémité supérieure Q, est défini par le vecteur Q9Q. Le rayon R est une grandeur algébrique de signe opposé à celui de l'ordonnée du point Q (il est donc positif pour la configuration représentée sur la figure (6) (b)). -- Page 6/11 - 155 160 165 À À Z Z FT Q\ -Q b | \ À LE -- >. T ------ -- à
27 Qo Tnt EUR \ Po
7 Pi
\
\
Fibre centrale (OQ) | L
L (p) de rayon de courbure À © x
\
N |
or TV
AD O ZT À. 2%
(a) \ Support maintenant rigidement la lame (b)
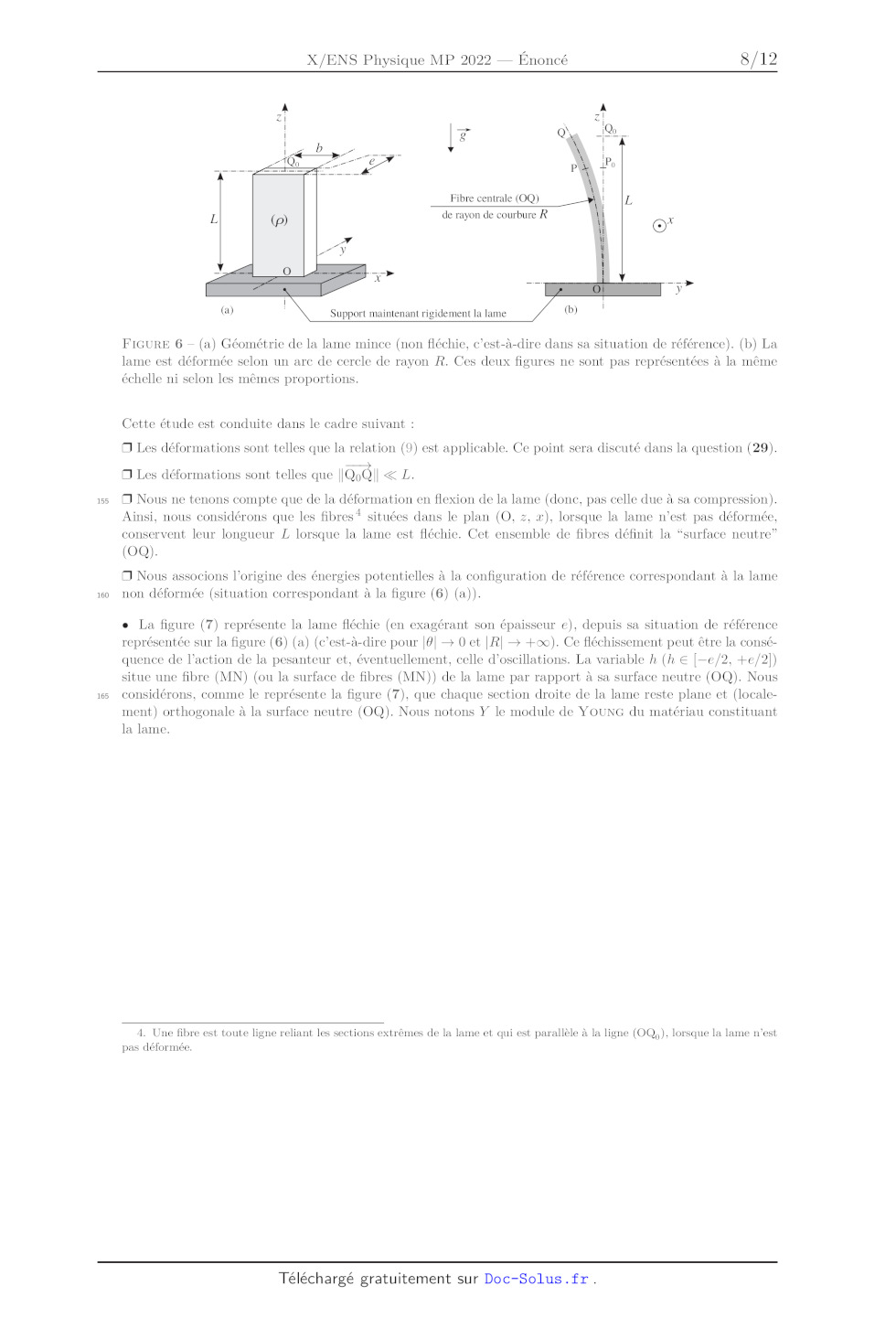
FIGURE 6 -- (a) Géométrie de la lame mince (non fléchie, c'est-à-dire dans sa
situation de référence). (b) La
lame est déformée selon un arc de cercle de rayon À. Ces deux figures ne sont
pas représentées à la même
échelle ni selon les mêmes proportions.
Cette étude est conduite dans le cadre suivant :
( Les déformations sont telles que la relation (9) est applicable. Ce point
sera discuté dans la question (29).
] Les déformations sont telles que |QoQl & L.
( Nous ne tenons compte que de la déformation en flexion de la lame (donc, pas
celle due à sa compression).
Ainsi, nous considérons que les fibres * situées dans le plan (O, z, x),
lorsque la lame n'est pas déformée.
conservent leur longueur ZL lorsque la lame est fléchie. Cet ensemble de fibres
définit la "surface neutre"
(OQ):
( Nous associons l'origine des énergies potentielles à la configuration de
référence correspondant à la lame
non déformée (situation correspondant à la figure (6) (a)).
e La figure (7) représente la lame fléchie (en exagérant son épaisseur e),
depuis sa situation de référence
représentée sur la figure (6) (a) (c'est-à-dire pour [0] -- 0 et [R|] -- +). Ce
fléchissement peut être la consé-
quence de l'action de la pesanteur et, éventuellement, celle d'oscillations. La
variable hk (h EUR [--e/2, +e/2))
situe une fibre (MN) (ou la surface de fibres (MN)) de la lame par rapport à sa
surface neutre (0Q). Nous
considérons, comme le représente la figure (7), que chaque section droite de la
lame reste plane et (locale-
ment) orthogonale à la surface neutre (0Q). Nous notons Y le module de YOUNG du
matériau constituant
la lame.
4. Une fibre est toute ligne reliant les sections extrêmes de la lame et qui
est parallèle à la ligne (0Q,), lorsque la lame n'est
pas déformée.
-- Page 7/11 -
À
£i
., \
\ \ |
Co Go
« \
J \ h \
--> 7 . \
| ° TT |
oT \ É
7 Pi #00
ur É \
kR D J \ \ L
27 \
' \
eT \ \ X
LÀ li | C)
oT | |
TT 1
e 0 1
07 |
TT I
__ ALT L M'_Y eu
| | -ef2 Oi +e/2 | ?}y
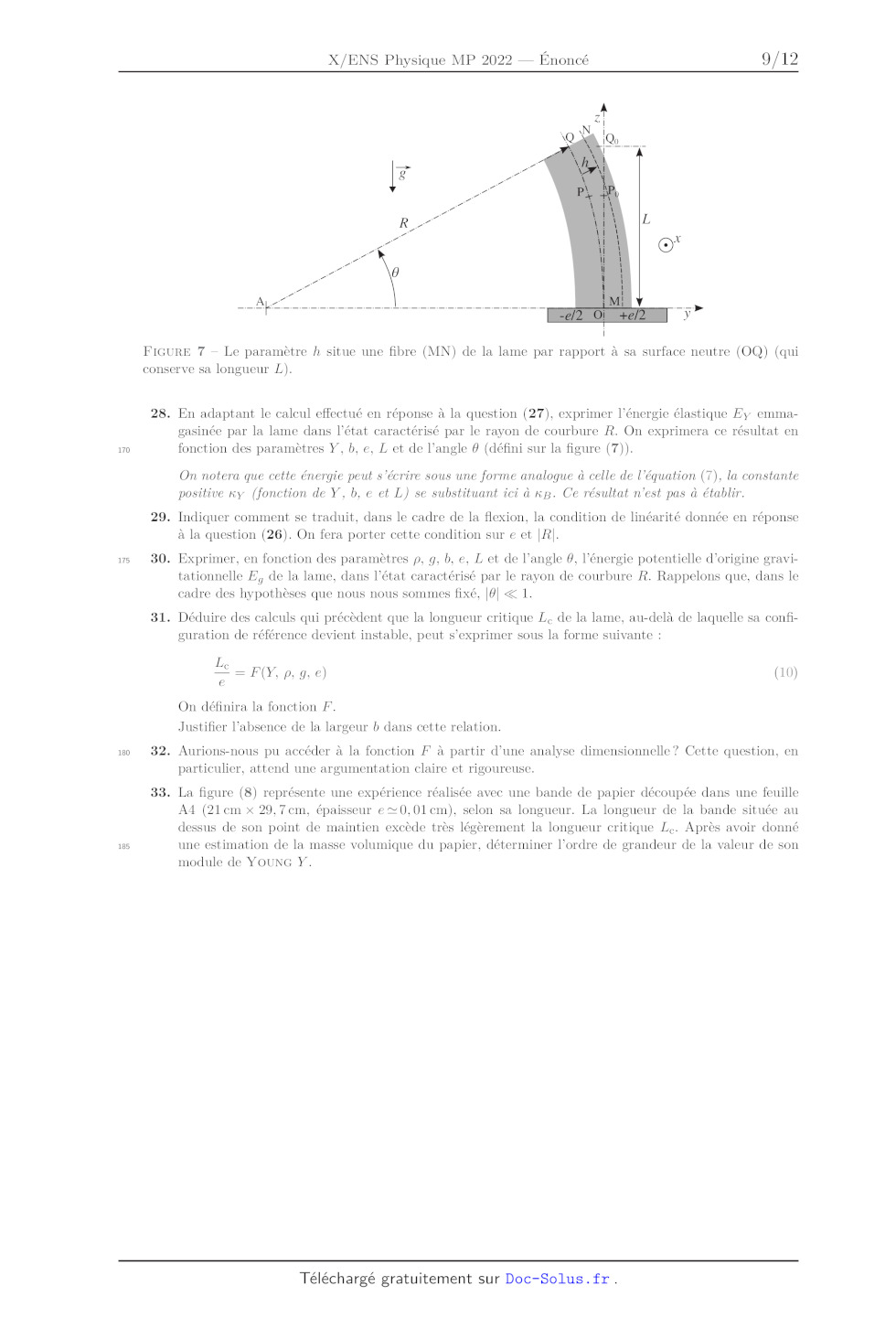
FIGURE 7 -- Le paramètre h situe une fibre (MN) de la lame par rapport à sa
surface neutre (OQ) (qui
conserve sa longueur L).
28.
170
29.
175
931.
180
39.
185
30.
32.
En adaptant le calcul effectué en réponse à la question (27), exprimer
l'énergie élastique Ey emma-
gasinée par la lame dans l'état caractérisé par le rayon de courbure À. On
exprimera ce résultat en
fonction des paramètres Y, b, e, L et de l'angle 0 (défini sur la figure (7)).
On notera que cette énergie peut s'écrire sous une forme analogue à celle de
l'équation (7), la constante
positive ky (fonction de Y, b, e et L) se substituant ici à kg. Ce résultat
n'est pas à établir.
Indiquer comment se traduit, dans le cadre de la flexion, la condition de
linéarité donnée en réponse
à la question (26). On fera porter cette condition sur e et |R|.
Exprimer, en fonction des paramètres p, g, b, e, Let de l'angle 6, l'énergie
potentielle d'origine gravi-
tationnelle À, de la lame, dans l'état caractérisé par le rayon de courbure À.
Rappelons que, dans le
cadre des hypothèses que nous nous sommes fixé, [0| 1.
Déduire des calculs qui précèdent que la longueur critique Z. de la lame,
au-delà de laquelle sa confi-
guration de référence devient instable, peut s'exprimer sous la forme suivante :
L
_ -- F(Y, P; 9; e) (10)
On définira la fonction F.
Justifier l'absence de la largeur b dans cette relation.
Aurions-nous pu accéder à la fonction F' à partir d'une analyse dimensionnelle
? Cette question, en
particulier, attend une argumentation claire et rigoureuse.
La figure (8) représente une expérience réalisée avec une bande de papier
découpée dans une feuille
A4 (21cm x 29,7cm, épaisseur e 0,01 cm), selon sa longueur. La longueur de la
bande située au
dessus de son point de maintien excède très légèrement la longueur critique L..
Après avoir donné
une estimation de la masse volumique du papier, déterminer l'ordre de grandeur
de la valeur de son
module de YOUNG Y.
-- Page 8/11 -
190
195
200
205
210
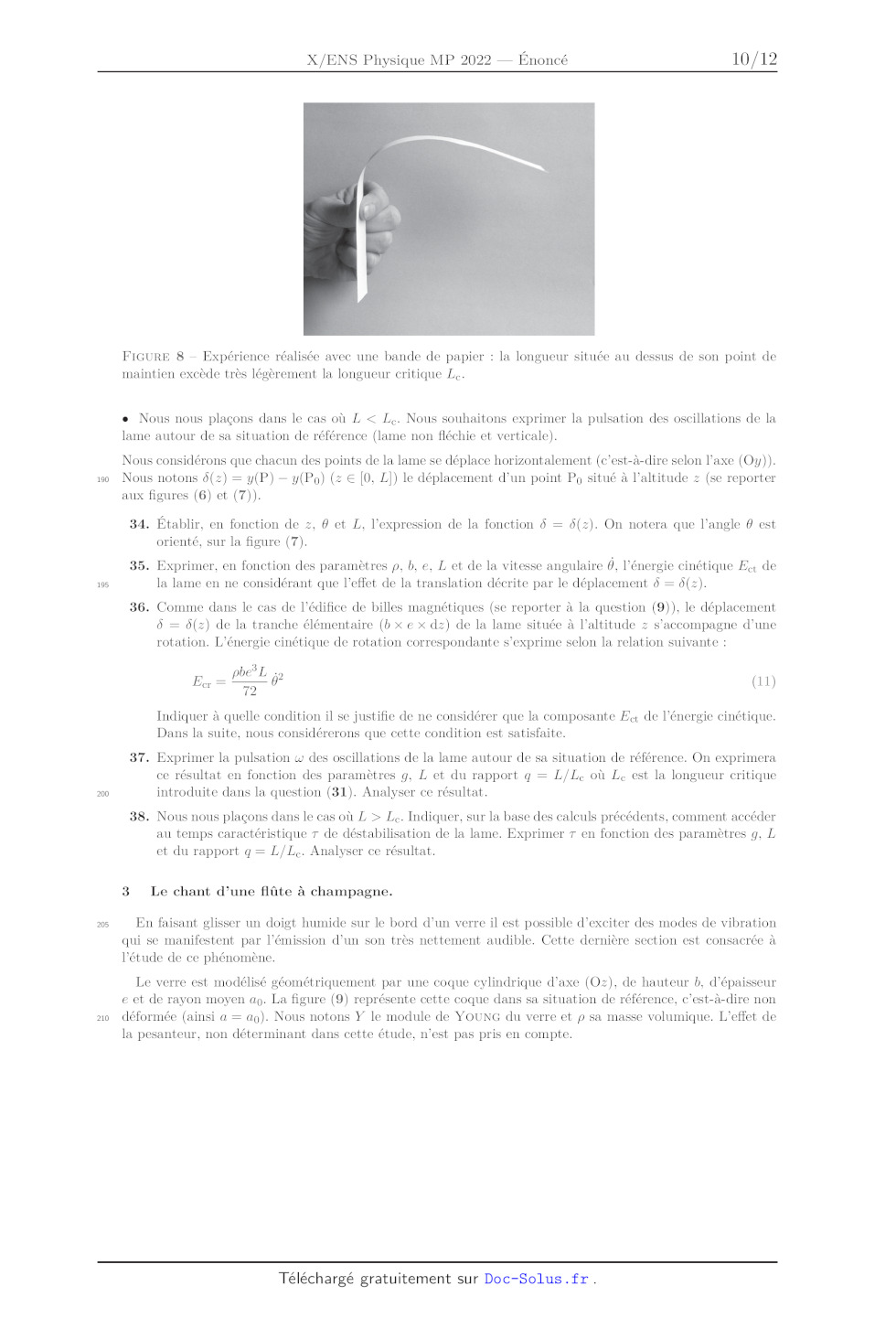
FIGURE 8 -- Expérience réalisée avec une bande de papier : la longueur située
au dessus de son point de
maintien excède très légèrement la longueur critique L..
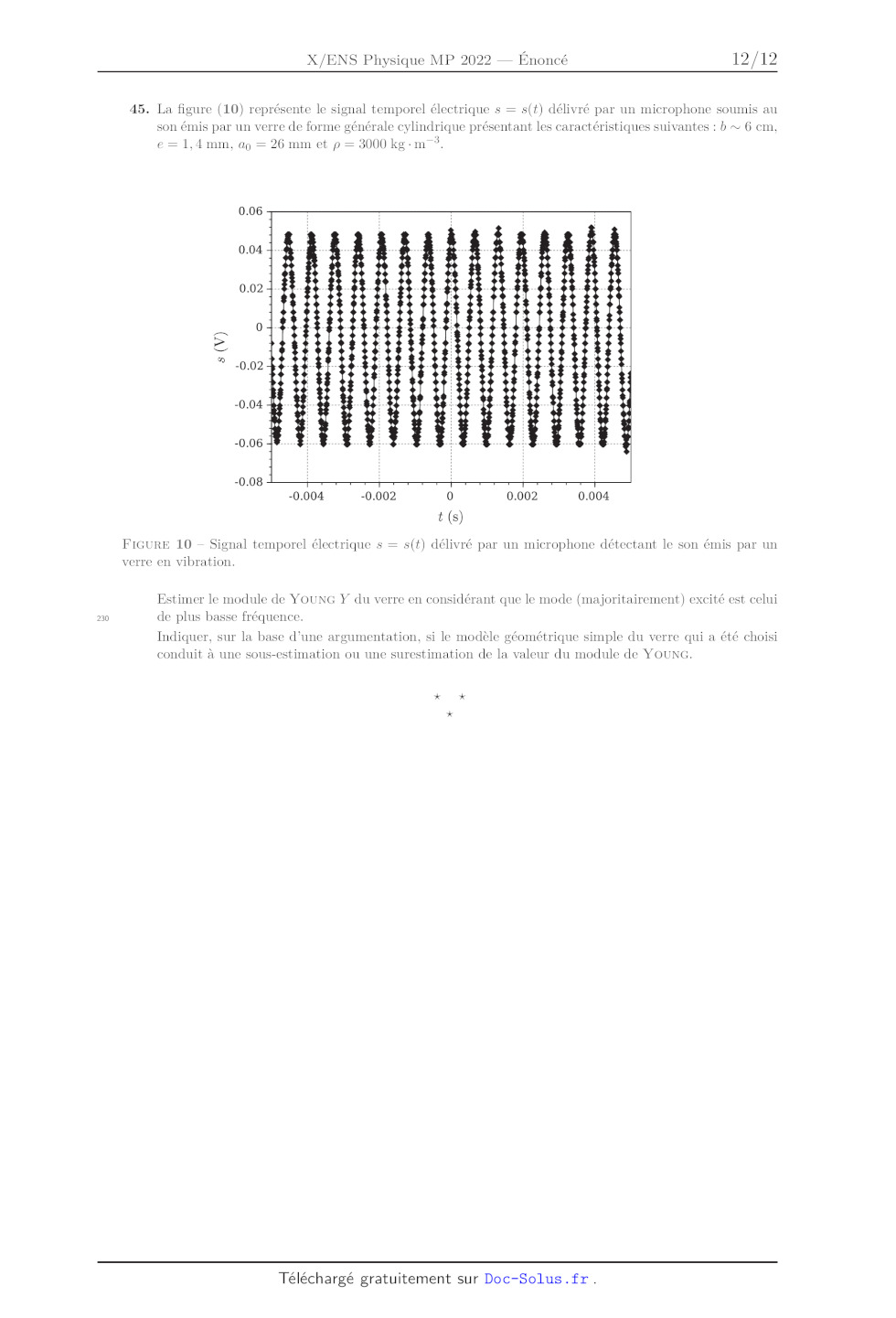
e Nous nous plaçons dans le cas où L < L.. Nous souhaitons exprimer la pulsation des oscillations de la lame autour de sa situation de référence (lame non fléchie et verticale). Nous considérons que chacun des points de la lame se déplace horizontalement (c'est-à-dire selon l'axe (Oy)). Nous notons Ô(z) = y(P) -- y(Po) (z EUR [0, L]) le déplacement d'un point Po situé à l'altitude z (se reporter aux figures (6) et (7)). 34. Établir, en fonction de z, 0 et L, l'expression de la fonction ô = 6(z). On notera que l'angle 4 est orienté, sur la figure (7). 35. Exprimer, en fonction des paramètres p, b, e, L et de la vitesse angulaire b, l'énergie cinétique E;+ de la lame en ne considérant que l'effet de la translation décrite par le déplacement Ô = ô(z). 36. Comme dans le cas de l'édifice de billes magnétiques (se reporter à la question (9)), le déplacement Ô -- Ô(z) de la tranche élémentaire (b x e x dz) de la lame située à l'altitude z s'accompagne d'une rotation. L'énergie cinétique de rotation correspondante s'exprime selon la relation suivante : E pbe°L . Er 75 0° (11) Indiquer à quelle condition il se justifie de ne considérer que la composante E,;+4 de l'énergie cinétique. Dans la suite, nous considérerons que cette condition est satisfaite. 37. Exprimer la pulsation w des oscillations de la lame autour de sa situation de référence. On exprimera ce résultat en fonction des paramètres g, L et du rapport qg = L/Le où Le est la longueur critique introduite dans la question (31). Analyser ce résultat. 38. Nous nous plaçons dans le cas où L > L.. Indiquer, sur la base des calculs
précédents, comment accéder
au temps caractéristique 7 de déstabilisation de la lame. Exprimer 7 en
fonction des paramètres g, L
et du rapport q = L/Lc. Analyser ce résultat.
3 Le chant d'une flûte à champagne.
En faisant glisser un doigt humide sur le bord d'un verre il est possible
d'exciter des modes de vibration
qui se manifestent par l'émission d'un son très nettement audible. Cette
dernière section est consacrée à
l'étude de ce phénomène.
Le verre est modélisé géométriquement par une coque cylindrique d'axe (Oz), de
hauteur b, d'épaisseur
e et de rayon moyen ao. La figure (9) représente cette coque dans sa situation
de référence, c'est-à-dire non
déformée (ainsi a = ag). Nous notons Y le module de YOUNG du verre et p sa
masse volumique. L'effet de
la pesanteur, non déterminant dans cette étude, n'est pas pris en compte.
-- Page 9/11 -
215
220
225
À
b (p,Y) >
_L-Y
Y O!-77| ?
me :
COR (b)
FIGURE 9 -- Verre représenté par une coque cylindrique (ao, b, e) d'axe (Oz).
(a) : Vue latérale. (b) Vue de
dessus du verre non déformé (a = ao et M = Mb). Ces vues ne sont pas
représentées à la même échelle.
Un point M5 appartenant au cylindre de rayon a est repéré par rapport à l'axe
(Ox), choisi arbitrairement,
par l'angle 0 et, par rapport au plan (O, x, y), par son altitude z (se
reporter à la figure (9)). Les vibrations
de la coque considérées sont décrites par le champ de déplacement radial MM =
(a(0, t) -- ao) ü, (0) tel
que :
a(0,t) = ag(1+e(t)sin(kd)) (VzEeÏ0,b]) où Et) ER (ft) K1) et 0EUR [0, 27] (12)
Le paramètre k& (k EUR R°) caractérise angulairement le mode de vibration du
verre considéré. La fonction
£ = e(t) décrit l'évolution temporelle de son amplitude.
39. Définir l'ensemble des valeurs que peut prendre le paramètre k pour décrire
effectivement des modes
vibratoires de flexion de la coque cylindrique. Préciser la nature, propagative
ou stationnaire, de l'onde
décrite par l'équation (12). Représenter, en superposition de la situation de
référence (représentée sur
la figure (9) (b)), l'aspect de la déformation du verre pour le mode k = 2,
dans le cas où et) > 0 puis
dans celui où e(t) < 0. e Il apparut, dans les questions (19) et (28), que l'énergie élastique emmagasinée par une structure fléchie est liée à son rayon de courbure À. En adaptant à la situation qui nous intéresse le résultat établi en réponse à la question (28), l'énergie élastique emmagasinée par une portion de verre délimitée par le secteur angulaire élémentaire dO s'exprime par la relation suivante : Y be°ao 12 AO. Nous associons l'origine de l'énergie élastique à la configuration du verre non déformé. Indiquer alors, sur la base d'une argumentation, quelle est la forme de la fonction F à retenir parmi les deux propo- sitions (a) et (b) suivantes : (R(O) est ici un rayon de courbure local) (13) 1 dEy -- 5ky F(R()) dû où ky -- 1 1 R?2 a DOROP EE] (11 (a) F(R) -- 41. Le rayon de courbure local R = R(Ô) d'une courbe plane, décrite en coordonnées polaires par l'équation r = r(8), s'exprime par la relation suivante : 3/2 2 2 (r + y! ) | ; dr 1 d?r OÙ FT --= -- et r2 + 27/2 = yy// dô 7" d0? (15) Déterminer, au premier ordre par rapport à l'amplitude EUR, la fonction rayon de courbure R = R(0, e(t)) correspondant à l'équation polaire (12). 42. Exprimer, en fonction des paramètres Y, b, e, ao et K, l'énergie potentielle élastique £y emmaganisée par le verre, au second ordre par rapport à l'amplitude EUR. A3. Exprimer, en fonction des paramètres p, b, e, ao et de la dérivée temporelle é, l'énergie cinétique Æc de l'ensemble de la coque vibrante. A4. Déduire des résultats qui précèdent l'expression de la pulsation w, des oscillations associée au mode k. -- Page 10/11 - 45. La figure (10) représente le signal temporel électrique s = s(t) délivré par un microphone soumis au son émis par un verre de forme générale cylindrique présentant les caractéristiques suivantes : b + 6 cm, e = 1,4 mm, ao = 26 mm et p = 3000 kg -m *. 0.06 0.04 0.02 0 2 ® -0.02 -0.04 - 22 42 2 à & À NX LX IN LE * a ' A ' à CU Û D 7 | 4 S | » à ù | L S À n -0.06 +. + + 3. + +. EUR. 3 3. ne : -0.08 Fr a ---- a -- -0.004 -0.002 0 0.002 0.004 FIGURE 10 -- Signal temporel électrique s = s(t) délivré par un microphone détectant le son émis par un verre en vibration. Estimer le module de YOUNG Y du verre en considérant que le mode (majoritairement) excité est celui 230 de plus basse fréquence. Indiquer, sur la base d'une argumentation, si le modèle géométrique simple du verre qui a été choisi conduit à une sous-estimation ou une surestimation de la valeur du module de YOUNG. -- Page 11/11 -