
X Physique et Sciences de l'ingénieur MP 2004
| Thème de l'épreuve | Réacteur à plasma |
| Principaux outils utilisés | équations de Maxwell, mouvement d'une particule chargée, asservissements, correcteurs, diagrammes de Bode |
| Mots clefs | réacteur à plasma, automatique |
Corrigé
:👈 gratuite pour tous les corrigés si tu crées un compte
👈 l'accès aux indications de tous les corrigés ne coûte que 1 € ⬅ clique ici
👈 gratuite pour tous les corrigés si tu crées un compte
- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
👈 gratuite pour ce corrigé si tu crées un compte
- - - - - - - - -
Énoncé complet
(télécharger le PDF)





Énoncé obtenu par reconnaissance optique des caractères
ÉCOLE POLYTECHNIQUE FILIÈRE MP
Option Physique et Sciences de l'Ingénieur
CONCOURS D'ADMISSION 2004
COMPOSITION DE PHYSIQUE ET SCIENCES DE L'INGENIEUR
(Durée : 4 heures)
L'utilisation des calculatrices est autorisée pour cette épreuve.
Réacteur à plasma
Plus de la moitié des opérations de fabrication des composants
micro--électroniques, tels que
les mémoires et les microprocesseurs, sont effectuées dans des << réacteurs plasmas >>. L'objectif
de ce problème est l'étude et l'analyse des propriétés physiques et des
méthodes de contrôle des
deux principaux types de << réacteurs plasmas >> : les << réacteurs capacitifs >> et les << réacteurs inductifs >>. Dans ces deux types de réacteurs :
(i) des champs électromagnétiques alternatifs transfèrent de la puissance à un
gaz ionisé et
génèrent ainsi des ions et des électrons;
(ii) des champs électriques statiques extraient ces ions du gaz ionisé.
Les ions ainsi générés et extraits sont utilisés dans les procédés de dépôt et
de gravure qui
constituent les différentes étapes de fabrication des composants
micro--électroniques.
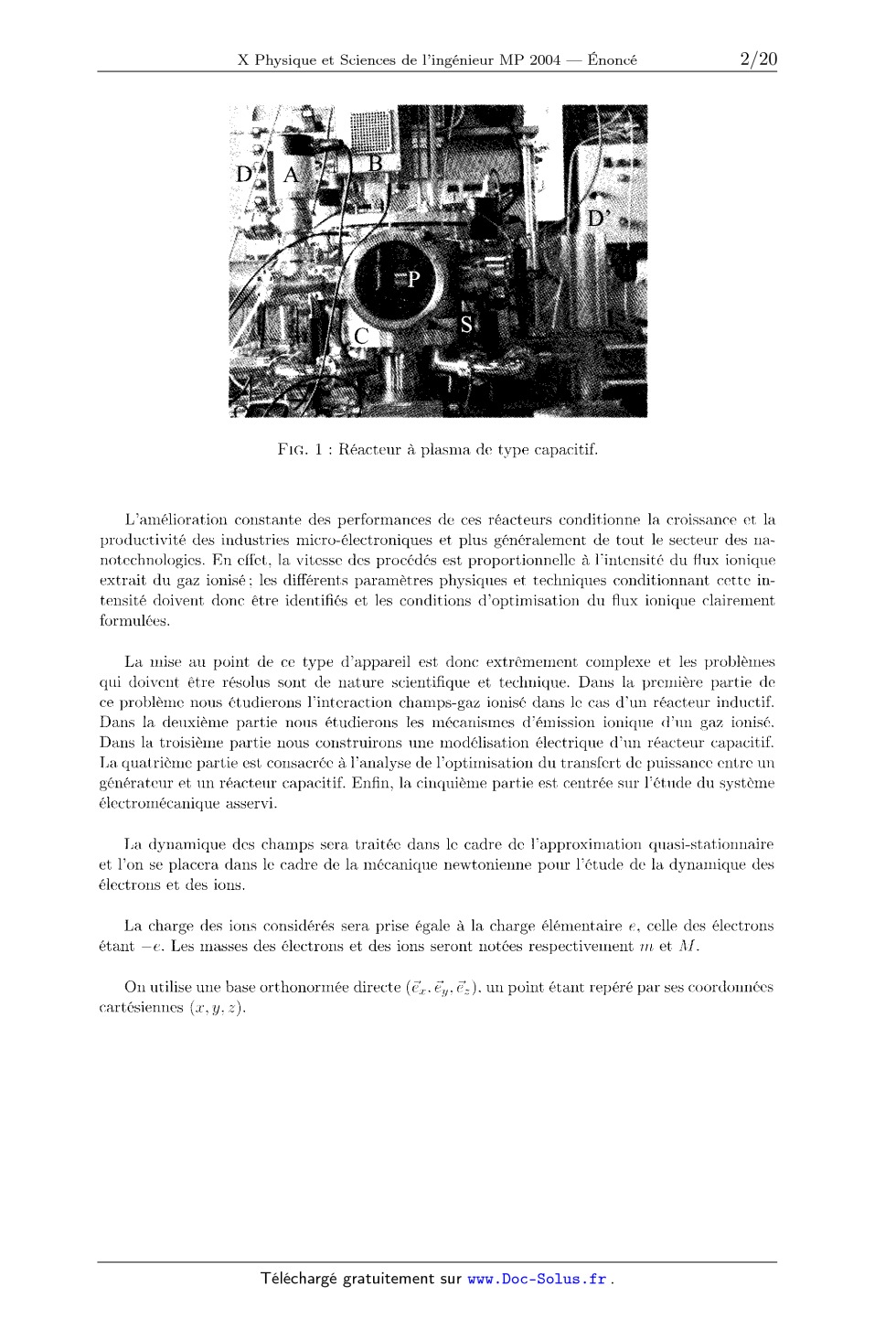
La photographie ci--dessous (figure 1) présente un réacteur capacitif. La
chambre cylindrique
principale C, au centre de la photographie, est une enceinte à gaz ionisé. On
peut distinguer deux
bandes lumineuses claires, derrière le hublot, c'est le gaz ionisé ou plasma,
P. Des mécanismes
d'interaction champs--particules dans ce gaz ionisé sont étudiés dans les
premières parties de
cette composition. Au--dessus de cette chambre C, on distingue un boîtier
vertical B, << la boîte d'accord >>, qui est un système électromécanique asservi du transfert de
puissance dans le gaz
ionisé. Les dernières parties de cette épreuve sont consacrées à l'étude de ce
système qui joue un
rôle essentiel dans la qualité des dépôts obtenus ou des gravures effectuées.
À droite de ce boîtier B, le cylindre vertical A est une jauge permettant de
piloter l'alimenta--
tion en gaz. À l'arrière, on aperçoit ce système d'alimentation en gaz D et D'
; enfin, le système
de pompage est raccordé à la chambre principale C par les canalisations S.
FIG. 1 : Réacteur a plasma de type capacitif.
L'amélioration constante des performances de ces réacteurs conditionne la
croissance et la
productivité des industries micro--électroniques et plus généralement de tout
le secteur des na--
notechnologies. En effet, la vitesse des procédés est proportionnelle a
l'intensité du flux ionique
extrait du gaz ionisé; les différents paramètres physiques et techniques
conditionnant cette in--
tensité doivent donc être identifiés et les conditions d'optimisation du flux
ionique clairement
formulées.
La mise au point de ce type d'appareil est donc extrêmement complexe et les
problèmes
qui doivent être résolus sont de nature scientifique et technique. Dans la
première partie de
ce problème nous étudierons l'interaction champs--gaz ionisé dans le cas d'un
réacteur inductif.
Dans la deuxième partie nous étudierons les mécanismes d'émission ionique d'un
gaz ionisé.
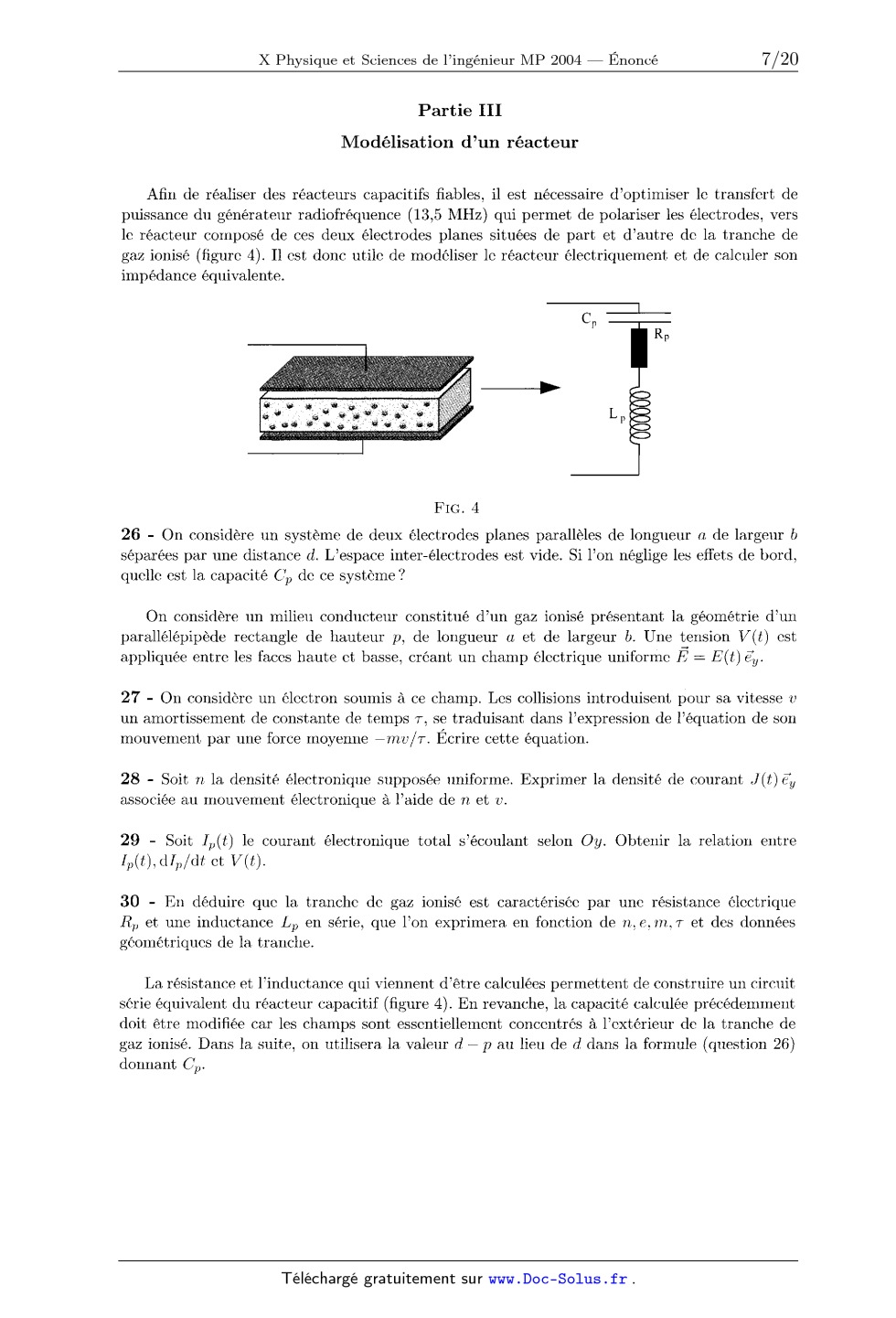
Dans la troisième partie nous construirons une modélisation électrique d'un
réacteur capacitif.
La quatrième partie est consacrée a l'analyse de l'optimisation du transfert de
puissance entre un
générateur et un réacteur capacitif. Enfin, la cinquième partie est centrée sur
l'étude du système
électromécanique asservi.
La dynamique des champs sera traitée dans le cadre de l'approximation
quasi--stationnaire
et l'on se placera dans le cadre de la mécanique newtonienne pour l'étude de la
dynamique des
électrons et des ions.
La charge des ions considérés sera prise égale à la charge élémentaire e, celle
des électrons
étant ----e. Les masses des électrons et des ions seront notées respectivement
m et A! .
--»
On utilise une base orthonormée directe (éÏt, @, ez), un point étant repéré par
ses coordonnées
cartésiennes (:15,y, z).
Équations de Maxwell :
div Ê : --'Û-- div Ë : 0
50
rotÊ=--î--Î rotË=uoî+eouoî--Î
Données numériques :
permittivité du vide 50 = 8, 85 >< 10_12 C.m"1 splitéabilité du vide ...) : 47r >< 10_7 F.m"1 masse de l'électron m = 9,1 >< 10--31 kg unité de masse atomique u = 1,66 >< 10"27 kg charge élémentaire e = 1, 6 >< 10--19 C. Partie I Interaction champs - gaz ionisé 1.1 Une plaque métallique conductrice de grandes dimensions, parallèle à yOz, est parcourue par un courant surfacique de densité donnée par JS : Jo(t)êy. 1 -- Montrer, par des considérations de symétrie correctement explicitées, que ce courant engendre en tout point un champ magnétique aligné selon é}, 2 - Montrer de plus qu'il est uniforme, à des distances faibles devant les dimensions de la plaque. 1.2 Un gaz ionisé occupe le demi-espace a: > 0 (figure 2). Les effets de bords
le long des
directions y et z seront négligés. Ce gaz ionisé, composé d'ions et
d'électrons, est globalement
neutre. La densité électronique n est uniforme. Les ions, compte tenu de leur
inertie, restent
immobiles.
FIG. 2
Dans le demi-espace vide a: < 0, entre plaque et plasma, on suppose le champ magnétique uniforme, de la forme : B(t) = B0(t) é}, si oe { 0 . \V Dans le demi-espace occupé par le plasma (:D O) règne un champ : --+ B(oe,t) = B(oe,t) @ si a: > 0 .
Ce champ magnétique variable engendre un champ électrique que l'on supposera
dirigé le long
de 03; : E (ac, 75) = E (a:, t) @ et qui accélère les électrons, dont on
désigne par Ü(æ, t) la vitesse.
3 - Écrire les trois équations reliant dans le plasma B (a:, t), E (cc, t) et
17(:L', t).
4 - Ecrire les conditions aux limites vérifiées par le champ électromagnétique
à l'interface plasma--
vide.
5 - La force d'origine magnétique sur les électrons est négligée. Éliminer
alors B(oe, t), et U(æ, t)
des trois équations établies à la question 3 et montrer que E (a:, t) est
solution de :
32É(oe,t) 1
"aî-- * Xî E
0 a chaque instant t, en
fonction de BD (t).
7 - Application numérique : Évaluer la longueur caractéristique des variations
spatiales des
champs dans le demi--espace a: > 0 dans le cas d'un réacteur inductif où la
densité électronique
est de 1017 m"3.
1.3 À plus haute pression, les collisions modifient la réponse électronique. La
<< relation constitutive du milieu >> devient alors la loi d'Ohm : ; = 0Ê, où a est la
conductivité du
gaz ionisé. Comme précédemment, on suppose pour sc { 0, entre plaque et plasma,
le champ
magnétique uniforme donné par : Ë(t) = BD (t) é}.
8 - Établir dans ce régime collisionnel le système de trois équations régissant
les dépendances
spatio--temporelles des champs et du courant dans le demi-espace oe ; O.
9 - En déduire l'équation aux dérivées partielles vérifiée par B (a:, t).
Comment appelle--t-on ce
type d'équation ? Quelle est la dimension du coefficient 1/,u00 ?
10 - On suppose BO (t) sinusoïdal, soit BO (t) = BO exp(jwt) en notation
complexe. On recherche
une solution de l'équation établie à la question 9 sous la forme B (cc, t) =
B(æ) exp(jwt). Établir
l'équation différentielle vérifiée par B(a:).
11 - Résoudre cette équation et exprimer B (oe,t) à chaque instant et en tout
point du demi--
espace oe ; O.
12 -- Quelle est la longueur caractéristique des variations spatiales des
champs dans ce régime
collisionnel ?
13 -- La conductivité 0 est reliée au temps moyen entre collisions 7' par 0 :
neQT / m. Exprimer
le rapport entre les deux longueurs caractéristiques des questions 5 et 12 en
fonction (1 /7w)1/2.
Établir un critère permettant de décider de la pertinence du modèle sans
collision ou du modèle
collisionnel en fonction de la fréquence du champ et des caractéristiques du
gaz ionisé.
14 - Application numérique : 7' est de l'ordre de 10_7 s dans les réacteurs
industriels haute
pression. La densité 77. est de l'ordre de n = 1017 m_3. La pulsation des
champs est notée ou, avec
w/27r : 13, 5 MHz. Quelle est la valeur de la longueur de pénétration
collisionnelle des champs ?
Partie II
Emission ionique
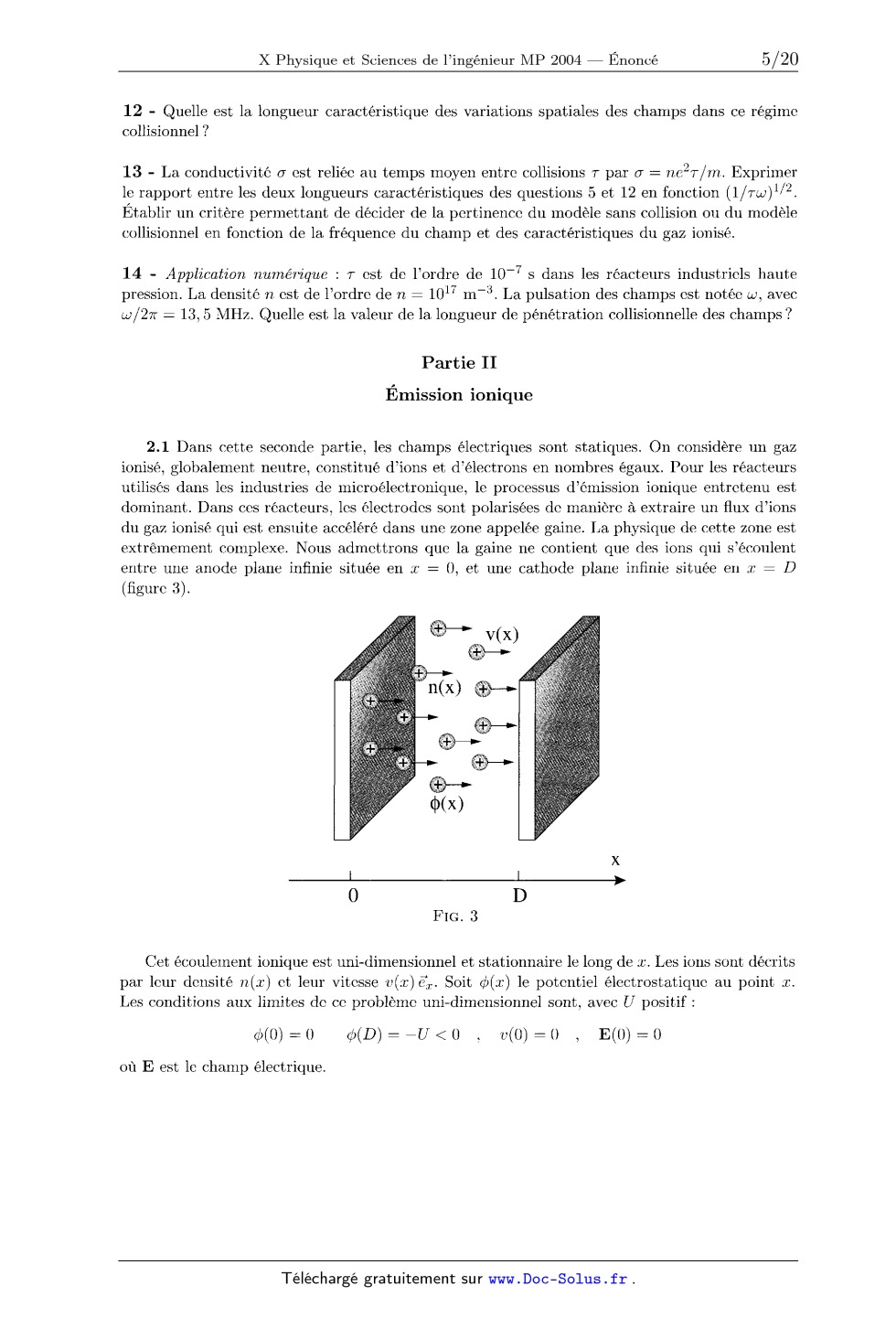
2.1 Dans cette seconde partie, les champs électriques sont statiques. On
considère un gaz
ionisé, globalement neutre, constitué d'ions et d'électrons en nombres égaux.
Pour les réacteurs
utilisés dans les industries de microélectronique, le processus d'émission
ionique entretenu est
dominant. Dans ces réacteurs, les électrodes sont polarisées de manière à
extraire un flux d'ions
du gaz ionisé qui est ensuite accéléré dans une zone appelée gaine. La physique
de cette zone est
extrêmement complexe. Nous admettrons que la gaine ne contient que des ions qui
s'écoulent
entre une anode plane infinie située en a: = O, et une cathode plane infinie
située en a: = D
(figure 3).
0 D
FIG. 3
Cet écoulement ionique est uni-dimensionnel et stationnaire le long de $. Les
ions sont décrits
par leur densité n(:c) et leur vitesse U(æ) ë}. Soit çb(oe) le potentiel
électrostatique au point $.
Les conditions aux limites de ce problème uni-dimensionnel sont, avec U positif
:
@(0)=0 çb(D)=--U> par le
générateur qui alimente le système soit la plus faible possible.
La capacité GP du réacteur dépend de ses conditions de fonctionnement et est
susceptible de
varier au cours du processus. On procède à sa << compensation >> en deux
étapes. On ajoute une
inductance L en série, pour s'assurer que cette branche du circuit soit
inductive a la fréquence
de travail (13,5 MHZ) et pour toute la plage de variation de Cp; puis on << accorde >> l'ensemble
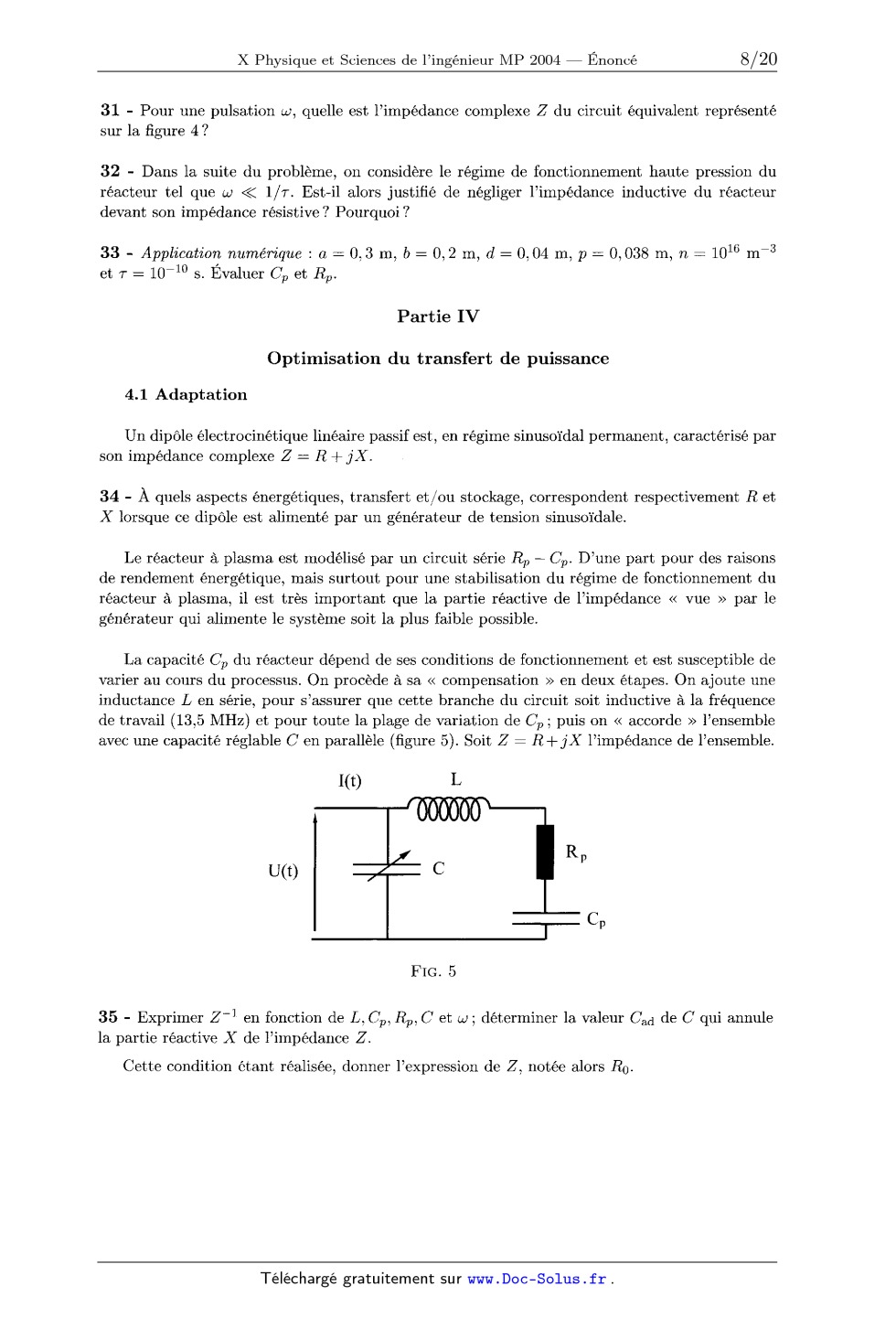
avec une capacité réglable C en parallèle (figure 5). Soit Z = R+ jX
l'impédance de l'ensemble.
I(t) L
U(t)
FIG. 5
35 - Exprimer Z _1 en fonction de L, Cp, Rp, C et w; déterminer la valeur Gad
de C qui annule
la partie réactive X de l'impédance Z.
Cette condition étant réalisée, donner l'expression de Z, notée alors R0.
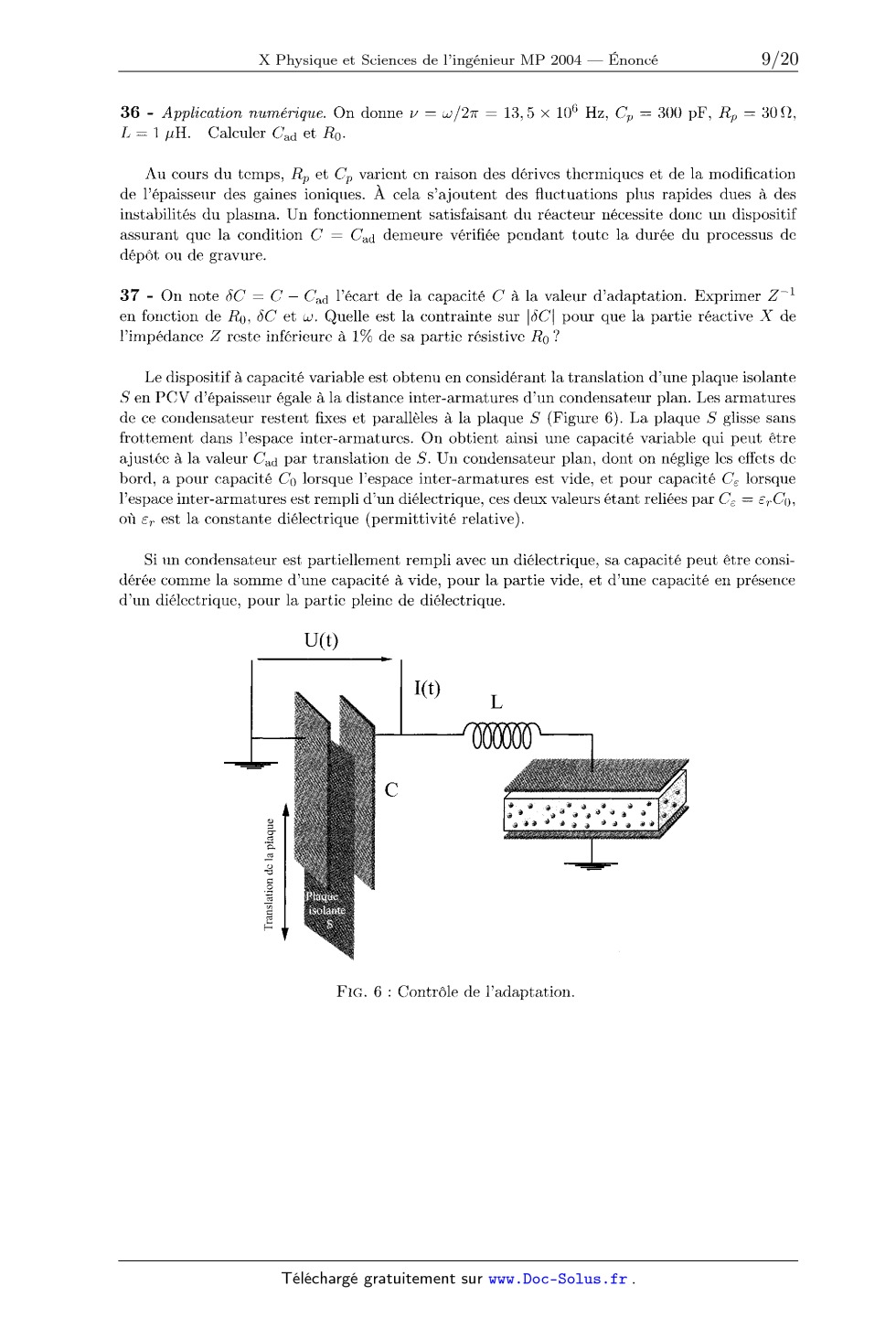
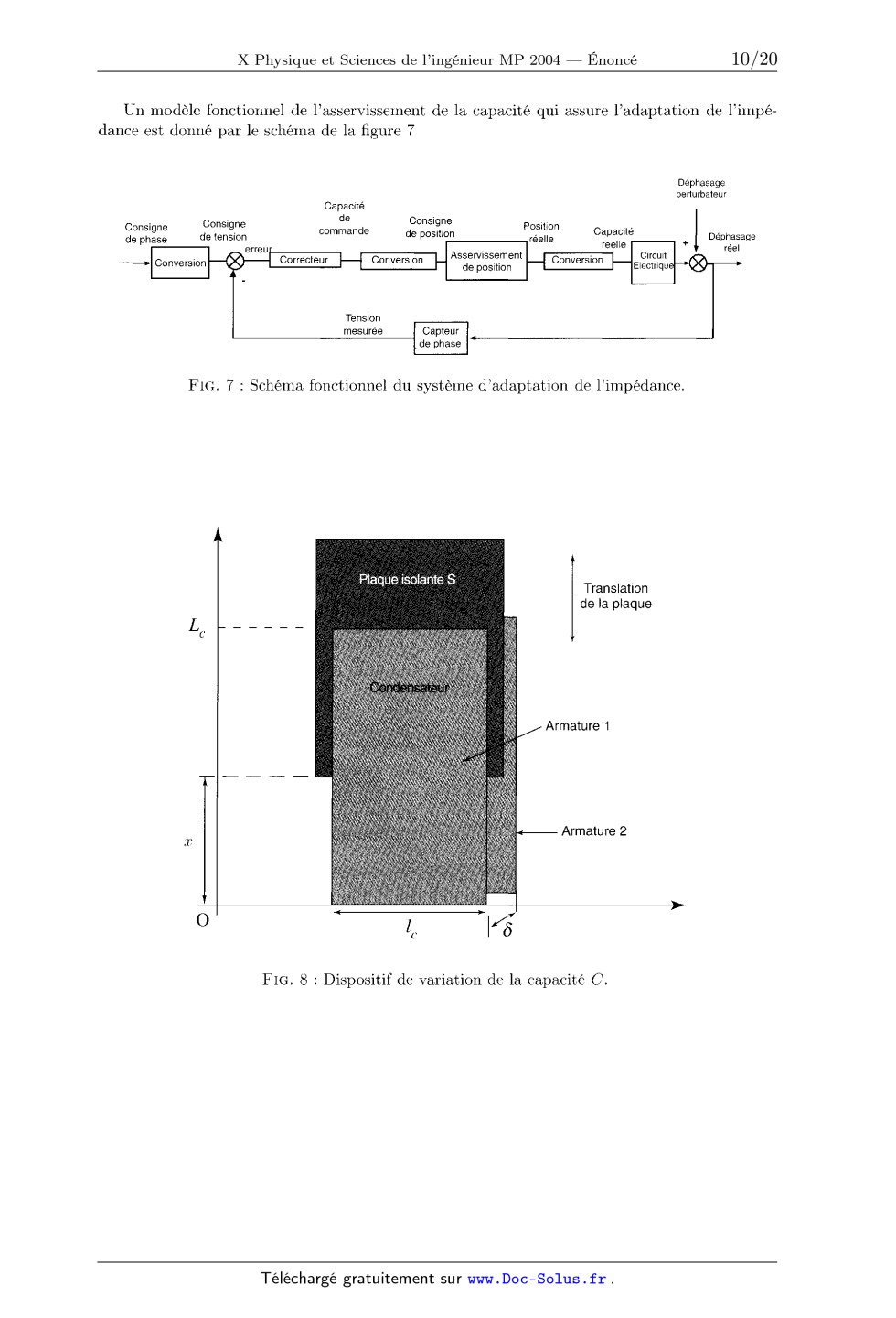
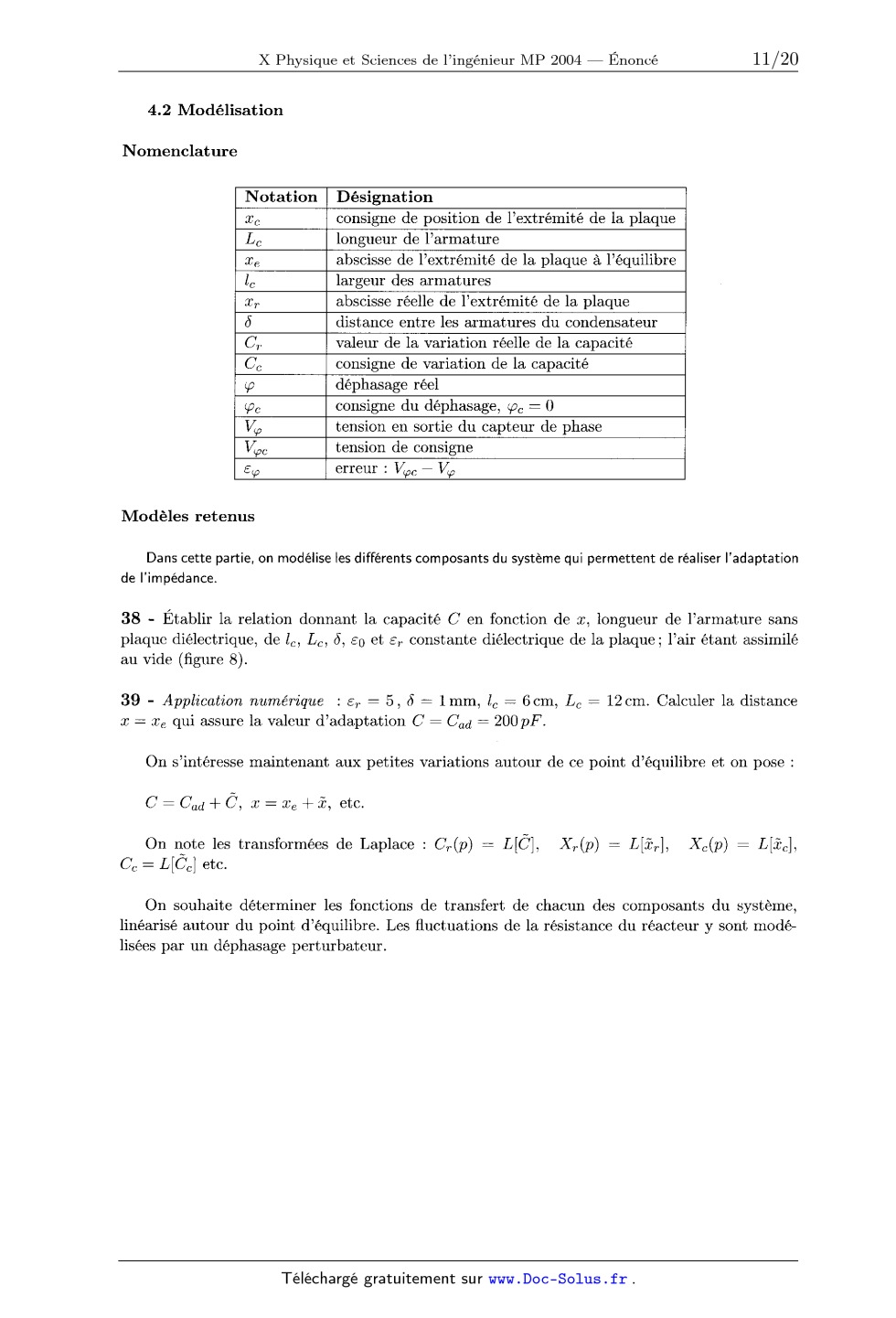
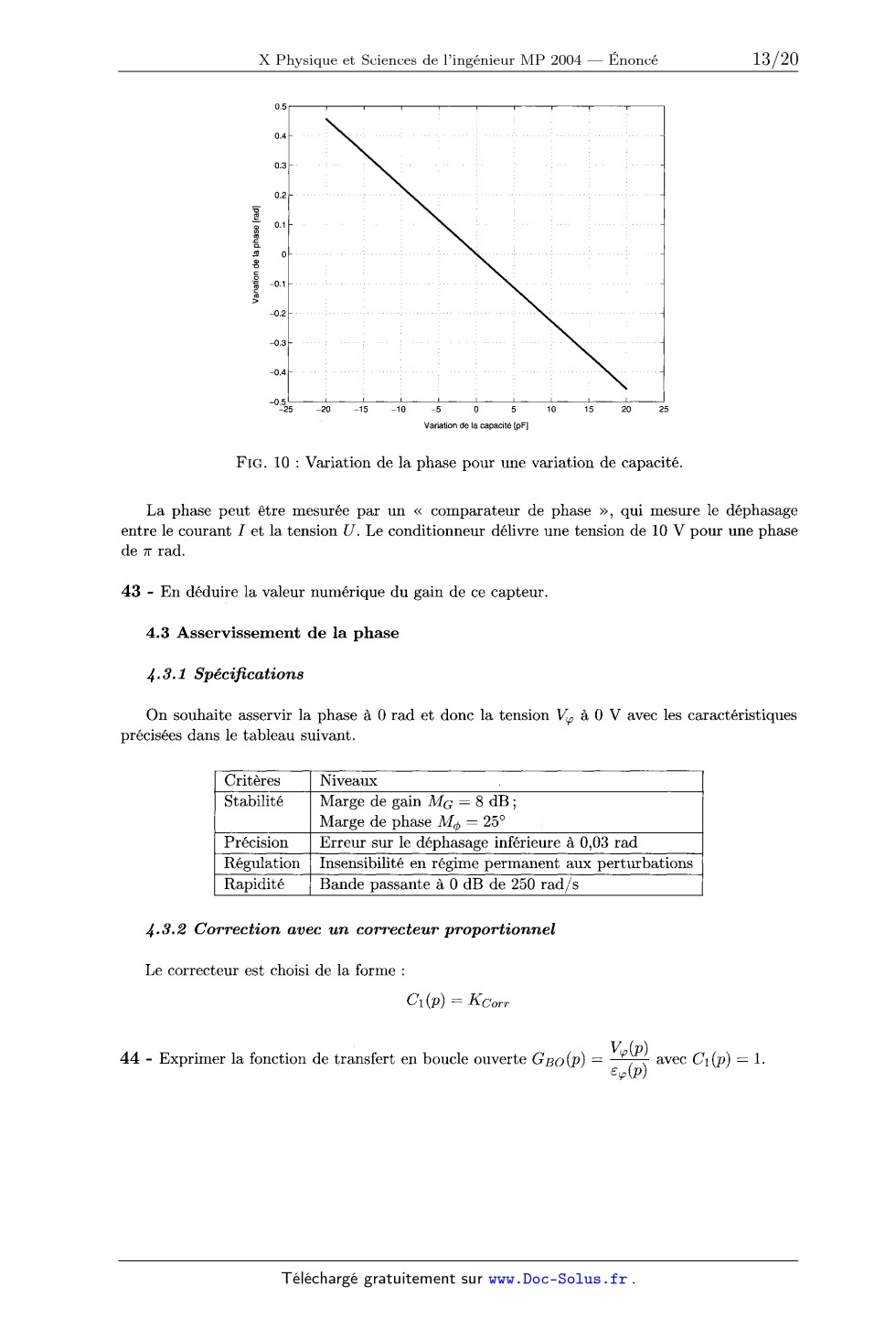
36 - Application numérique. On donne 1/ : w/27r : 13, 5 >< 106 Hz, Cp : 300 pF, Rp : 30 Q, L = 1 pH. Calculer Cad et R0. Au cours du temps, BP et Cp varient en raison des dérives thermiques et de la modification de l'épaisseur des gaines ioniques. À cela s'ajoutent des fluctuations plus rapides dues à des instabilités du plasma. Un fonctionnement satisfaisant du réacteur nécessite donc un dispositif assurant que la condition C' : Gad demeure vérifiée pendant toute la durée du processus de dépôt ou de gravure. 37 - On note 5C : C -- Cad l'écart de la capacité C a la valeur d'adaptation. Exprimer Z "' en fonction de R0, 5G et w. Quelle est la contrainte sur |5C | pour que la partie réactive X de l'impédance Z reste inférieure à 1% de sa partie résistive RO ? Le dispositif à capacité variable est obtenu en considérant la translation d'une plaque isolante S en PCV d'épaisseur égale à la distance inter--armatures d'un condensateur plan. Les armatures de ce condensateur restent fixes et parallèles à la plaque S (Figure 6). La plaque S glisse sans frottement dans l'espace inter--armatures. On obtient ainsi une capacité variable qui peut être ajustée a la valeur Cad par translation de S. Un condensateur plan, dont on néglige les effets de bord, a pour capacité CO lorsque l'espace inter-armatures est vide, et pour capacité CEUR lorsque l'espace inter--armatures est rempli d'un diélectrique, ces deux valeurs étant reliées par CE : EURTCO, où 5, est la constante diélectrique (permittivité relative). Si un condensateur est partiellement rempli avec un diélectrique, sa capacité peut être consi-- dérée comme la somme d'une capacité à vide, pour la partie vide, et d'une capacité en présence d'un diélectrique, pour la partie pleine de diélectrique. U") I(t) "VON Translation de la plaque FIG. 6 : Contrôle de l'adaptation. Un modèle fonctionnel de l'asservissement de la capacité qui assure l'adaptation de l'impé-- dance est donné par le schéma de la figure 7 Déphasage perturbateur Capacité . de c ' - Consr ne onsrgne " . , Conagne 9_ commande de position Po}srtron Capacrte , de phase de tensron reelle , Dephasage erreu A 'ssem t reelle C' 't + réel Conversron ". Correcteur Conversuon de position Conversron Electriqu- ". Tension mesurée Capteur de phase FIG. 7 : Schéma fonctionnel du système d'adaptation de l'impédance. Translation de la plaque Le C Armature 1 Armature 2 a: 0 FIG. 8 : Dispositif de variation de la capacité C . 4.2 Modélisation Nomenclature VHC--V EURI'I'GUI'. Notation iÊ< iiiiiilf Modèles retenus Dans cette partie, on modélise les différents composants du système qui permettent de réaliser l'adaptation de l'impédance. 38 - Établir la relation donnant la capacité C en fonction de 513, longueur de l'armature sans plaque diélectrique, de lc, LG, 5, 50 et ar constante diélectrique de la plaque; l'air étant assimilé au vide (figure 8). 39 - Application numérique : eT = 5, 5 = lmm, lC = 6cm, LC = 12 cm. Calculer la distance oe = æe qui assure la valeur d'adaptation C = Cad = 200 pF. On s'intéresse maintenant aux petites variations autour de ce point d'équilibre et on pose : C=Cad--l--C, oe=oee+î:, etc. On note les transformées de Laplace : Cr(p) = L[C], Xr(p) = L[î:r], Xc(p) = L[£ÎJC], Cc = L[Cc] etc. On souhaite déterminer les fonctions de transfert de chacun des composants du système, linéarisé autour du point d'équilibre. Les fluctuations de la résistance du réacteur y sont modé-- lisées par un déphasage perturbateur. FIG. 9 : Modélisation linéarisée du système d'adaptation de l'impédance. N 40 - Exprimer la relation entre les variations C' et Î. En déduire la fonction de transfert G1(p) : Xc(p) C?" (P) et la fonction de transfert G2 (p) = . Préciser l'influence de ces deux _ Cc(p) Xr(p) fonct10ns de transfert sur la stabilité et les_performances du système. La fonction de transfert H (p) = qui modélise l'asservissement de la position de la Xc(p) plaque sera étudiée dans la partie V. Elle peut être assimilée à une fonction de transfert du second ordre avec les caractéristiques suivantes : gain statique unitaire, dépassement de 25% et temps de montée de 20 ms. la relation entre le premier dépassement Le temps de montée est défini en fonction de la pulsation propre wo et de EUR par : 7r t ___--___ m w0\/1----£2 Exprimer la fonction de transfert H (p) en explicitant les valeurs numériques des coefficients. On se propose maintenant de déterminer la fonction de transfert reliant la phase de l'impédance Z à la valeur de Ô. 42 -- Exprimer la variation @ de la phase en fonction de R0, Ô et w. Comparer cette expression au résultat donné par le graphe de la figure 10. Déduire de ce graphe la valeur numérique de Hc(p)- Variation de la phase [rad] '--25 --20 --1 5 --1 0 --5 0 5 10 15 20 25 Variation de la capacité [pF] PIG. 10 : Variation de la phase pour une variation de capacité. La phase peut être mesurée par un << comparateur de phase >>, qui mesure le
déphasage
entre le courant I et la tension U . Le conditionneur délivre une tension de 10
V pour une phase
de 7r rad.
43 - En déduire la valeur numérique du gain de ce capteur.
4.3 Asservissement de la phase
4.3.1 Spécifications
On souhaite asservir la phase à 0 rad et donc la tension VSO à 0 V avec les
caractéristiques
précisées dans le tableau suivant.
Critères Niveaux .
Stabilité Marge de gain MG = 8 dB;
Marge de phase M$ : 25°
Précision Erreur sur le déphasage inférieure à 0,03 rad
Régulation Insensibilité en régime permanent aux perturbations
Rapidité Bande passante a 0 dB de 250 rad/s
4.3.2 Correction avec un correcteur proportionnel
Le correcteur est choisi de la forme :
C11 (p) : KCorr
44 - Exprimer la fonction de transfert en boucle ouverte G BO (p)
45 - Tracer les graphes asymptotiques de Bode pour la fonction de transfert G
BO (p)
46 - Déterminer la valeur du gain KCOTT : Ko qui permet de respecter les marges
de stabilité
du cahier des charges.
47 - Exprimer l'erreur en régime permanent de la sortie a une perturbation en
échelon unitaire
g0b(t) : F(t), où F(t) est l'échelon d'Heaviside. Quelle est la valeur maximale
de l'amplitude
de la perturbation que peut tolérer le système asservi, conformément au cahier
des charges?
Conclure quant a la pertinence d'une correction proportionnelle.
4.3.3 Correction avec un correcteur Proportionnel--Intégral
On considère que le correcteur est de la forme :
1+T1p
C2(P) = K1 T1p
48 - Justifier le choix de ce type de correcteur par rapport à un correcteur de
type proportion-
nel. '
49 -- Déterminer la valeur de T1 pour imposer une marge de phase minimale de
250 a la pulsation
wc : 250 rad / 8. Choisir judicieusement le gain du correcteur.
50 - Pour cette valeur de T1, calculer la valeur a conférer au gain K1 pour
imposer une pulsation
de coupure de wc : 250 rad / s.
51 - Pour ces réglages du correcteur, donner les tracés asymptotiques de Bode
du système
corrigé en boucle ouverte. Le cahier des charges est--il respecté ? Conclure.
Partie V
Asservissement du système électromécanique
Dans cette partie, on se propose d'analyser le système qui réalise le
déplacement de la plaque isolante,
modélisé par la fonction de transfert H(p) (figure 9).
5.1 Description du système asservissant la position de la plaque
Le déplacement de la plaque isolante est assuré par un système asservi dont un
modèle de la
chaîne de motorisation est donné par la figure 11 : une vis sans fin est
solidaire de l'arbre d'un
moteur électrique. Cette vis transmet le mouvement a une roue qui est associée
à un système
<< bielle--manivelle >>, lequel permet de transformer le mouvement de rotation
en un mouvement
de translation.
ÿ
* !
: '. xz
| ! f
|
: ï "
| i /
: ._ . 8
| !
: ° ! 3
|
: D
' 4-
' PLAQUE
; =
I
O |
_"_L__ &
1 __
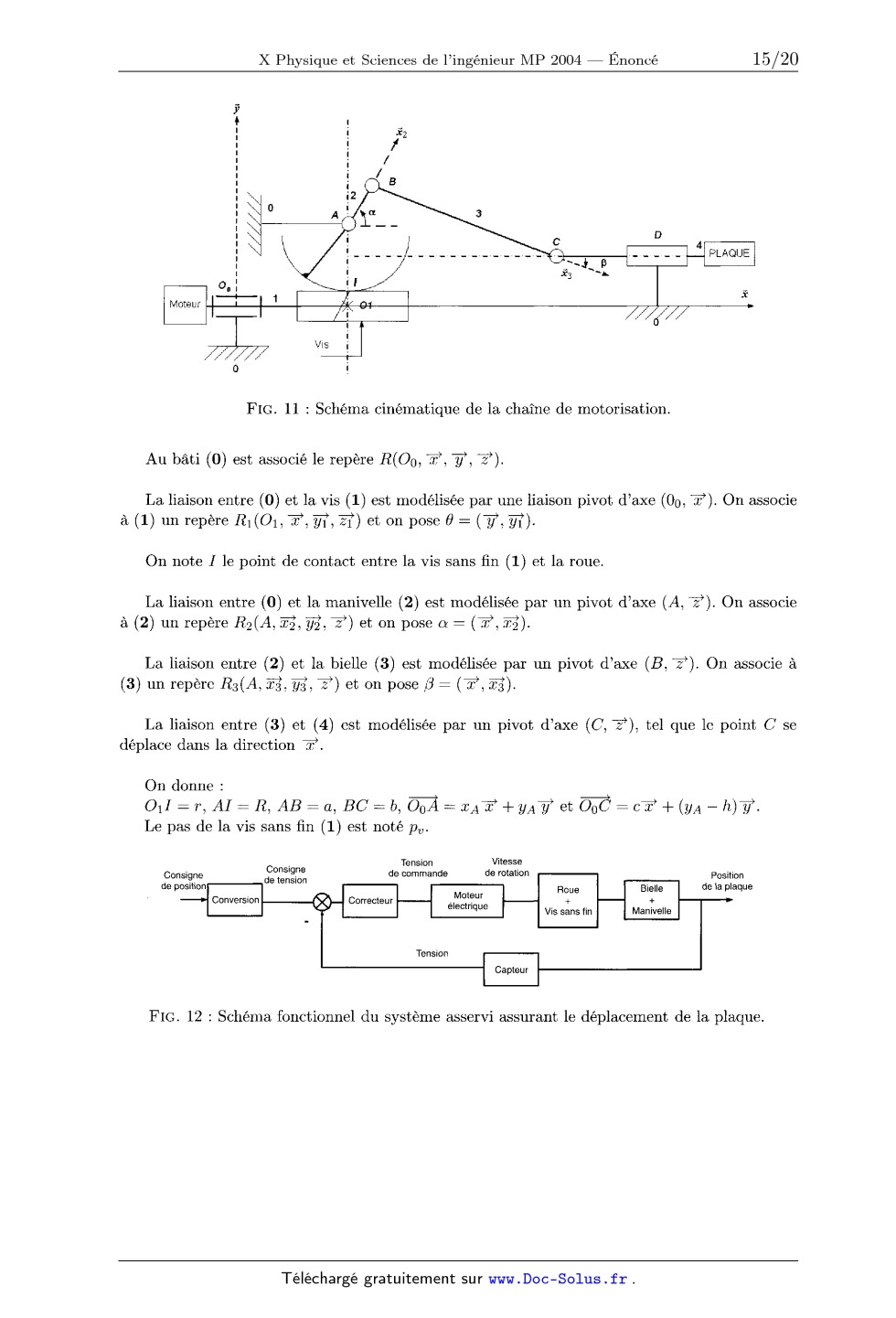
FIG. 11 : Schéma cinématique de la chaîne de motorisation.
Au bâti (O) est associé le repère R(Og, Î', Î, ?).
La liaison entre (0 et la vis (1) est modélisée par une liaison pivot d'axe
(OO, ÎE'). On associe
et on pose 9 : (Î, fi).
On note ] le point de contact entre la vis sans fin (1) et la roue.
La liaison entre (0) et la manivelle (2) est modélisée par un pivot d'axe (A,
7). On associe
a (2) un repère R2(À, 33--2', 'ÿä', ?) et on pose oz = (Î', QÎ5).
La liaison entre (2) et la bielle (3) est modélisée par un pivot d'axe (B , 7).
On associe a
(3) un repère R3(A, :Î3Îg', @, ?) et on pose fl : (Î', 533).
La liaison entre (3) et (4) est modélisêe par un pivot d'axe (C', TZ"), tel que
le point C se
déplace dans la direction Î'.
On donne :
OJ : 7", A] = R, AB : @, BC = b, 00Â : :UA--oe" +yAÎ et OOÏÎ : EUR? + (yA --
h)Î.
Le pas de la vis sans fin (1) est noté pv.
Conversion
Tension Vitesse
Consigne de commande de rotation
de tensmn
Position
de la plaque
Consigne
de position
Bieile
+
Manivelle
Roue
+
Vis sans fin
FIG. 12 : Schéma fonctionnel du système asservi assurant le déplacement de la
plaque.
On se propose d'analyser le fonctionnement de la chaîne de motorisation
adoptée, ainsi que la loi de
commande utilisée.
Le réglage initial de la position de la plaque est effectué en imposant une
valeur de h. Les
petites variations de la plaque autour de ce point d'équilibre sont réalisées à
l'aide du système
bielle/ manivelle décrit ci--dessus. Dans ce qui suit, on suppose que la
distance h est constante
(h = O) et on se limite à l'étude des petites variations autour d'un point
d'équilibre de posi--
tion ace.
5.2 Modèles retenus
5. 2. 1 Nomenclature
_--
___
_--
__--
__--
_
M =
_
tension de consigne
tension de commande du moteur
vitesse de rotation de l'arbre moteur
_ vitesse de translat10n de la plaque
Gain du capteur de pomt10n 0,3 V/ mm
_--
avec ces notations : 5136 = 566 + @.
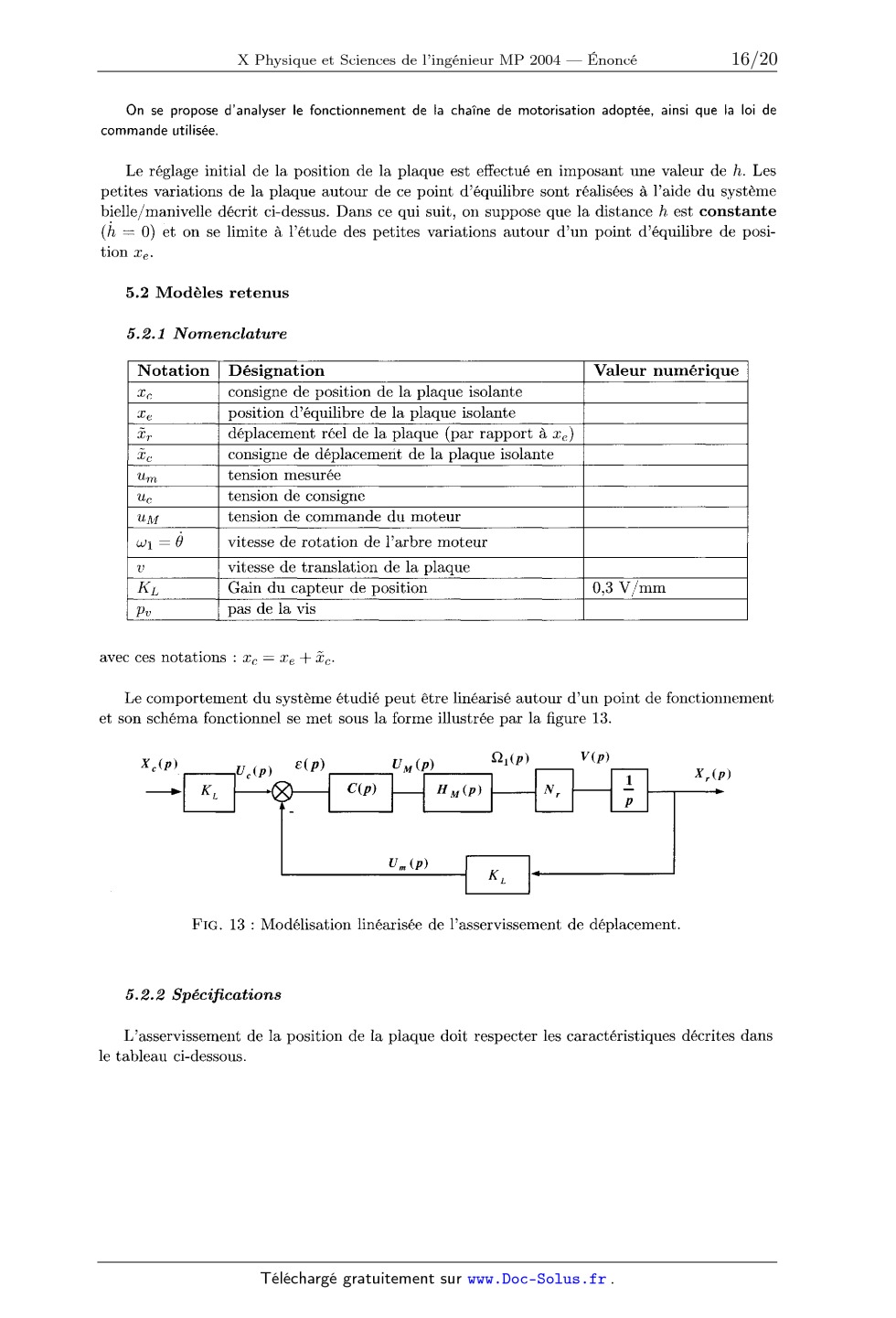
Le comportement du système étudié peut être linéarisé autour d'un point de
fonctionnement
et son schéma fonctionnel se met sous la forme illustrée par la figure 13.
Xc(P) Uc(P) 8(p) UM(p) Q1(lv) V(p)
' 1 X,(P)
_"- "' Nr ;
U...()
'
FIG. 13 : Modélisation linéarisée de l'asservissement de déplacement.
5. 2. 2 Spécifications
L'asservissement de la position de la plaque doit respecter les
caractéristiques décrites dans
le tableau ci--dessous.
Critères
Stabilité Marge de gain Mg : 12 dB
_--
Rapidite Pulsation de coupure a 0 dB de 160 rad/s
Premier dépassement inférieur à 25% .
On se propose de modéliser les différents composants du système
d'asservissement de la position de la
plaque isolante.
5.2.3 Modélisation du Moteur
90
80
70
-P 01 (D
O O 0
Vitesse du moteur [rad/s]
00
O
10
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18
Temps [3]
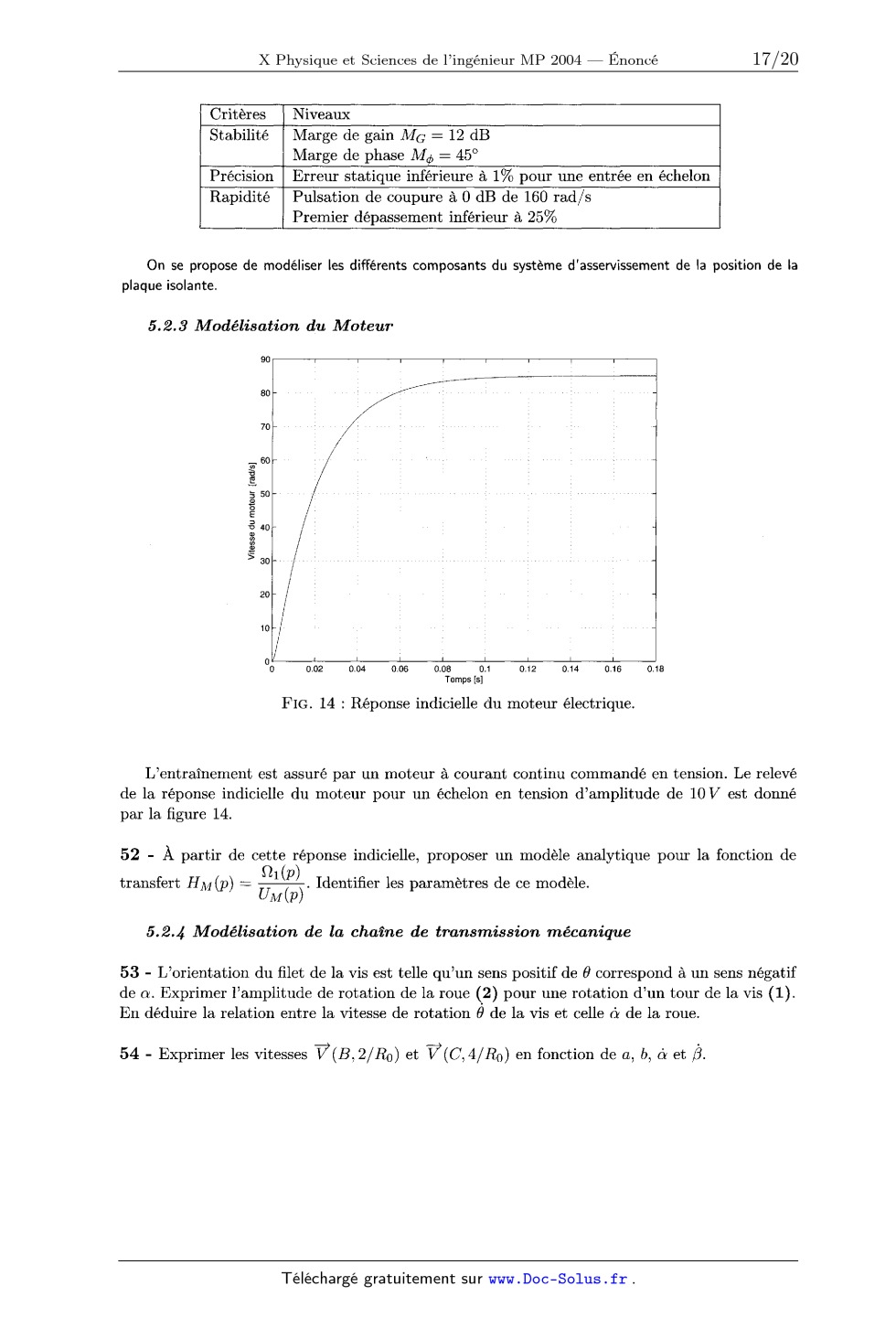
PIG. 14 : Réponse indicielle du moteur électrique.
L'entraînement est assuré par un moteur à courant continu commandé en tension.
Le relevé
de la réponse indicielle du moteur pour un échelon en tension d'amplitude de
10V est donné
par la figure 14.
52 - À partir de cette réponse indicielle, proposer un modèle analytique pour
la fonction de
Q
transfert HM (p) -- 1(p) . Identifier les paramètres de ce modèle.
_ UM(P)
5.2.4 Modélisation de la chaîne de transmission mécanique
53 - L'orientation du filet de la vis est telle qu'un sens positif de 9
correspond a un sens négatif
de oz. Exprimer l'amplitude de rotation de la roue (2) pour une rotation d'un
tour de la vis (1).
En déduire la relation entre la vitesse de rotation 9 de la vis et celle à de
la roue.
54 - Exprimer les vitesses Y(B, 2/R0) et Y(C,4/Rg) en fonction de a, b, à et 5.
55 - Donner la relation géométrique entre les angles 04 et 5 en fonction de a,
b et h.
56 -- En utilisant cette relation, exprimer (: en fonction de (34, 04, 6 et a.
On suppose que la vis (1) tourne d'un petit angle 59 autour d'un point
d'équilibre défini par
l'angle 9... On note de et fle les valeurs à l'équilibre de oz et 6 dans ce cas.
57 - En déduire 6c, le petit déplacement du point C suivant l'axe ? en fonction
de R, p... a, b,
de, h et (59.
58 - Pour optimiser le gain mécanique, on choisit comme point d'équilibre la
situation de : 90°.
6
Calculer le pas de la vis qui permet d'obtenir --3 = N,... = O, 35 mm/ rad pour
une valeur de
59
CL=Î.
5.2.5 Modélisation du capteur de position
Le capteur de position est un capteur LVDT (Linear Variable Differential
Transformer),
U...(p)
: K L.
Xr(p)
modélisé par un gain :
5.3 Synthèse de la correction
On donne N,... = O, 35 mm/rad.
5.3.1 Correction avec un correcteur proportionnel C (p) : Kp
59 -- Déterminer la fonction de transfert en boucle ouverte H BO (p) --
60 - Donner les tracés asymptotiques de Bode du module et de la phase de H BO
(p)
61 - Déterminer la valeur a conférer au gain Kp : K 2 du correcteur pour
imposer une pulsation
de coupure a 0 dB de 160 rad/s.
XT (19)
Xc(p)
est une fonction
62 -- Montrer que la fonction de transfert en boucle fermée H B F (p) :
du second ordre.
63 -- Calculer le coefficient d'amortissement de H BF(p) et en déduire la
valeur du premier
dépassement (on pourra utiliser les relations données a la question 41).
Oonclure.
5.3.2 Correction avec un correcteur par avance de phase
La figure 15 donne les tracés asymptotiques et réels de Bode de la fonction de
transfert en
boucle ouverte H BO (p) avec un correcteur C A p (p).
Module [dB]
Pulsation [rad/s]
--100
-110
--120
Phase [deg]
|
a
0
L
A
c>
--150
----1 70
--180
10
Pulsation [rad/s]
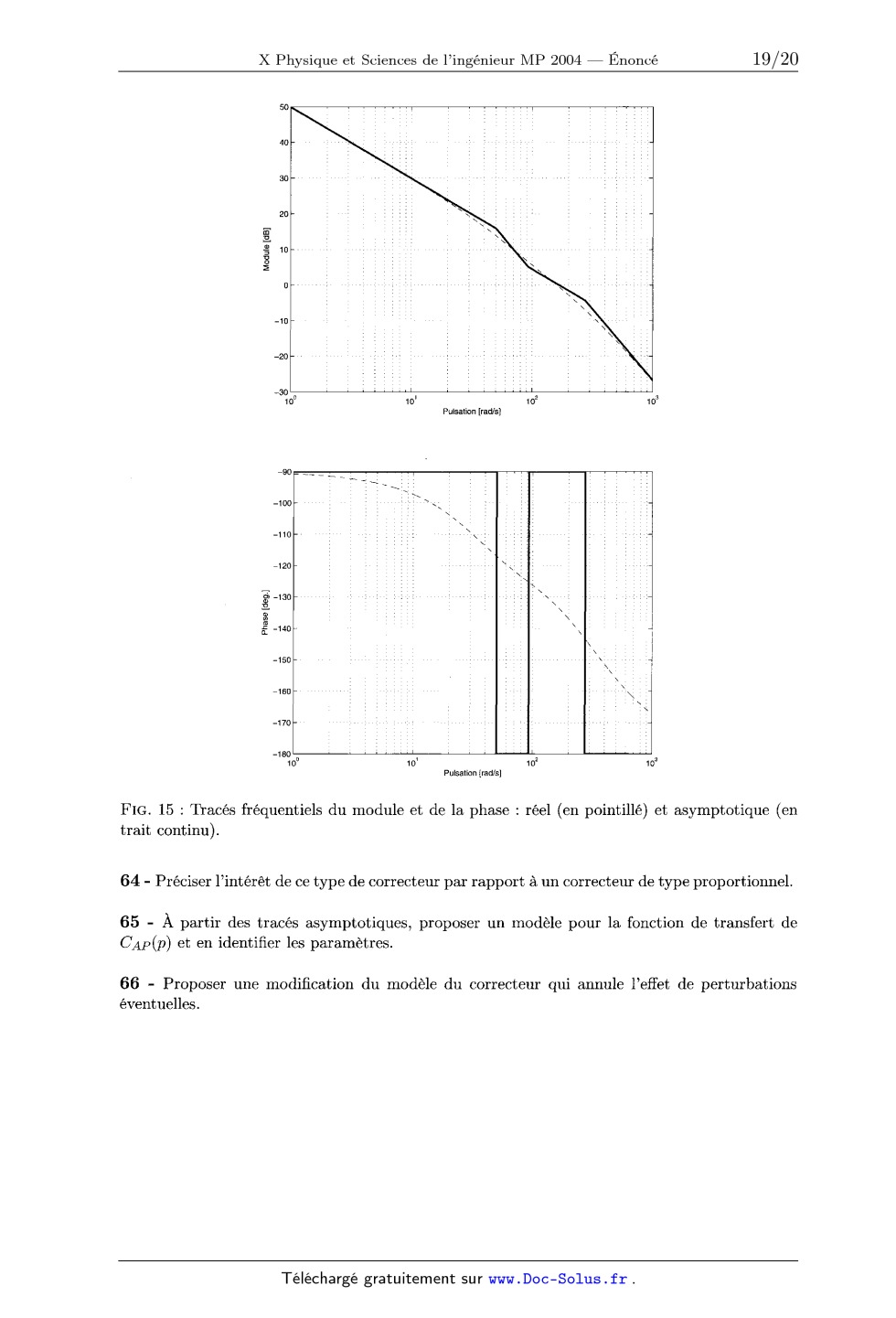
FIG. 15 : Tracés fréquentiels du module et de la phase : réel (en pointillé) et
asymptotique (en
trait continu).
64 - Préciser l'intérêt de ce type de correcteur par rapport a un correcteur de
type proportionnel.
65 - À partir des tracés asymptotiques, pr0poser un modèle pour la fonction de
transfert de
CAP(p) et en identifier les paramètres.
66 - Proposer une modification du modèle du correcteur qui annule l'effet de
perturbations
éventuelles.
5.4 Amélioration des performances du système à deux boucles d'asservissement
Le système d'asservissement de position étudié ci--dessus est intégré au
système global réali--
sant l'adaptation de l'impédance (figure 7).
Ainsi, le système complet est constitué de deux boucles d'asservissement
imbriquées :
-- Une boucle externe étudiée dans la quatrième partie, dont le correcteur est
synthétisé a la
section 4.3
-- Une boucle interne étudiée dans la cinquième partie, dont le correcteur est
analysé a la
section 5.3.
67 - Comparer les temps de réponse des deux boucles d'asservissement. Quelle
est la conséquence
de cette hiérarchie des temps de réponse sur les marges de stabilité de la
boucle externe ?
On souhaite garantir une marge de phase de 450 sur la boucle externe.
Pour ce faire, on peut modifier le correcteur de la boucle externe, Ccorr(p),
et / ou le correcteur
de la boucle interne, C(p)
68 - Proposer, sans entreprendre de calcul, les modifications à apporter au
correcteur de la
boucle interne pour garantir cette nouvelle valeur de la marge de phase de la
boucle externe.
69 - Proposer, sans entreprendre de calcul, les modifications à apporter au
correcteur de la
boucle externe pour garantir cette nouvelle valeur de sa marge de phase, sans
modifier la boucle
interne.