
X Physique et Sciences de l'ingénieur MP 2007
| Thème de l'épreuve | Optique adaptative |
| Principaux outils utilisés | optique ondulatoire et géométrique, asservissements |
| Mots clefs | optique adaptative, diffraction, télescope |
Corrigé
:👈 gratuite pour tous les corrigés si tu crées un compte
👈 l'accès aux indications de tous les corrigés ne coûte que 1 € ⬅ clique ici
👈 gratuite pour tous les corrigés si tu crées un compte
- - - - - - - - - - - - - - - - - - - - - - - - -
👈 gratuite pour ce corrigé si tu crées un compte
- - - - - - - - - - - - - - - - - - - - - - - - -
Énoncé complet
(télécharger le PDF)





Rapport du jury
(télécharger le PDF)

Énoncé obtenu par reconnaissance optique des caractères
ÉCOLE POLYTECHNIQUE FILIÈRE MP
Option Physique et Sciences de l'Ingénieur
CONCOURS D'ADMISSION 2007
COMPOSITION DE PHYSIQUE ET SCIENCES DE L'INGENIEUR
(Durée : 4 heures)
L'utilisation des calculatrices est autorisée pour cette épreuve.
***
Optique adaptative
L'optique adaptative est une technique qui permet de corriger en temps réel les
dégradations
des images des astres dues a la propagation a travers la turbulence
atmosphérique. Cette pro--
pagation introduit des différences de marche spatiales et temporelles
aléatoires sur les faisceaux
optiques. Les ondes incidentes sur le télescope, issues d'une source lointaine,
ne sont donc plus
des ondes planes et les dimensions des images formées au foyer ne sont plus
déterminées par la
diffraction de l'ouverture du télescope.
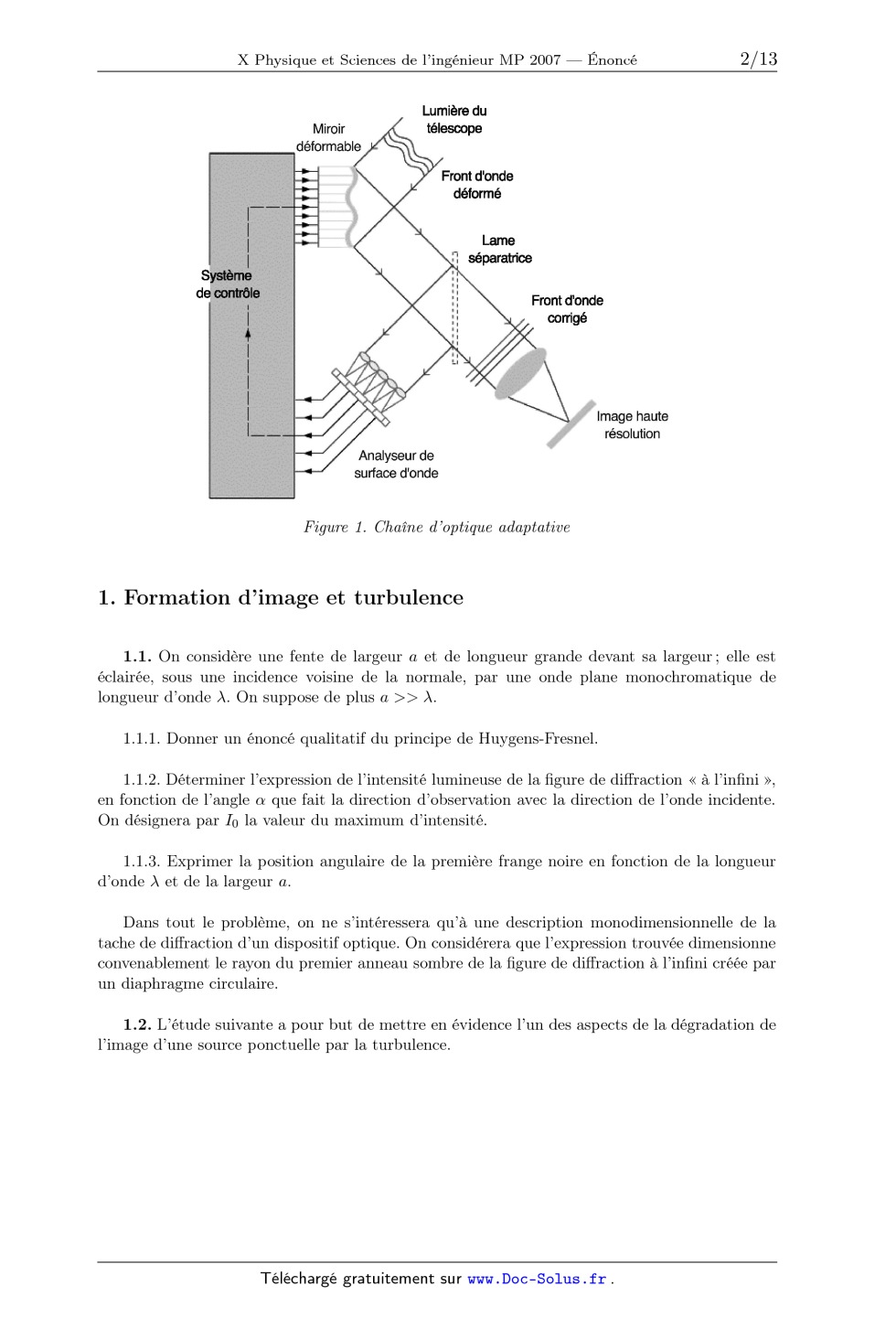
Un système d'optique adaptative (figure 1) est constitué d'un analyseur de
front d'onde qui
est en charge de la mesure en temps réel des perturbations du faisceau
lumineux, d'un miroir
déformable permettant d'introduire sur le faisceau des différences de marche
opposées a celles de
la turbulence pour en assurer la correction en temps réel et enfin d'un
calculateur effectuant le
traitement du signal de l'analyseur pour le calcul de la correction et
l'application des commandes
au miroir déformable.
La première partie traite de la formation d'une image, et présente quelques
caractéristiques de
la turbulence, pour estimer la dégradation de l'image due a cet effet
perturbateur. Les propriétés
du modèle de comportement d'un miroir modulable, élément de la chaîne d'optique
adaptative
pour corriger le front d'onde perturbé, sont développées en deuxième partie. La
troisième partie
expose deux techniques pour évaluer les déformations du front d'onde. La boucle
de régulation
d'un système d'optique adaptative est enfin décrite dans son environnement.
Constantes physiques
célérité de la lumière dans le vide (: = 3,00 >< 108 m - s--1 constante du gaz parfait RGP = 8, 31 J - K_1 -mol_1 Lumière du Miroir télescope déformable Front d'onde déformé {___ | Lame | Ü séparatrice Système de controle Front d'onde | corrigé + | | , ! | | Image haute |___ résolution Analyseur de surface d'onde Figure ]. Chaîne d'optique adaptative 1. Formation d'image et turbulence 1.1. On considère une fente de largeur a et de longueur grande devant sa largeur; elle est éclairée7 sous une incidence voisine de la normale7 par une onde plane monochromatique de longueur d'onde À. On suppose de plus a >> À.
1.1.1. Donner un énoncé qualitatif du principe de Huygens--Fresnel.
1.1.2. Déterminer l'expression de l'intensité lumineuse de la figure de
diffraction << à l'infini >>)
en fonction de l'angle & que fait la direction d'observation avec la direction
de l'onde incidente.
On désignera par 10 la valeur du maximum d'intensité.
1.1.3. Exprimer la position angulaire de la première frange noire en fonction
de la longueur
d'onde À et de la largeur a.
Dans tout le problème7 on ne s'intéressera qu'à une description
monodimensionnelle de la
tache de diffraction d'un dispositif optique. On considérera que l'expression
trouvée dimensionne
convenablement le rayon du premier anneau sombre de la figure de diffraction à
l'infini créée par
un diaphragme circulaire.
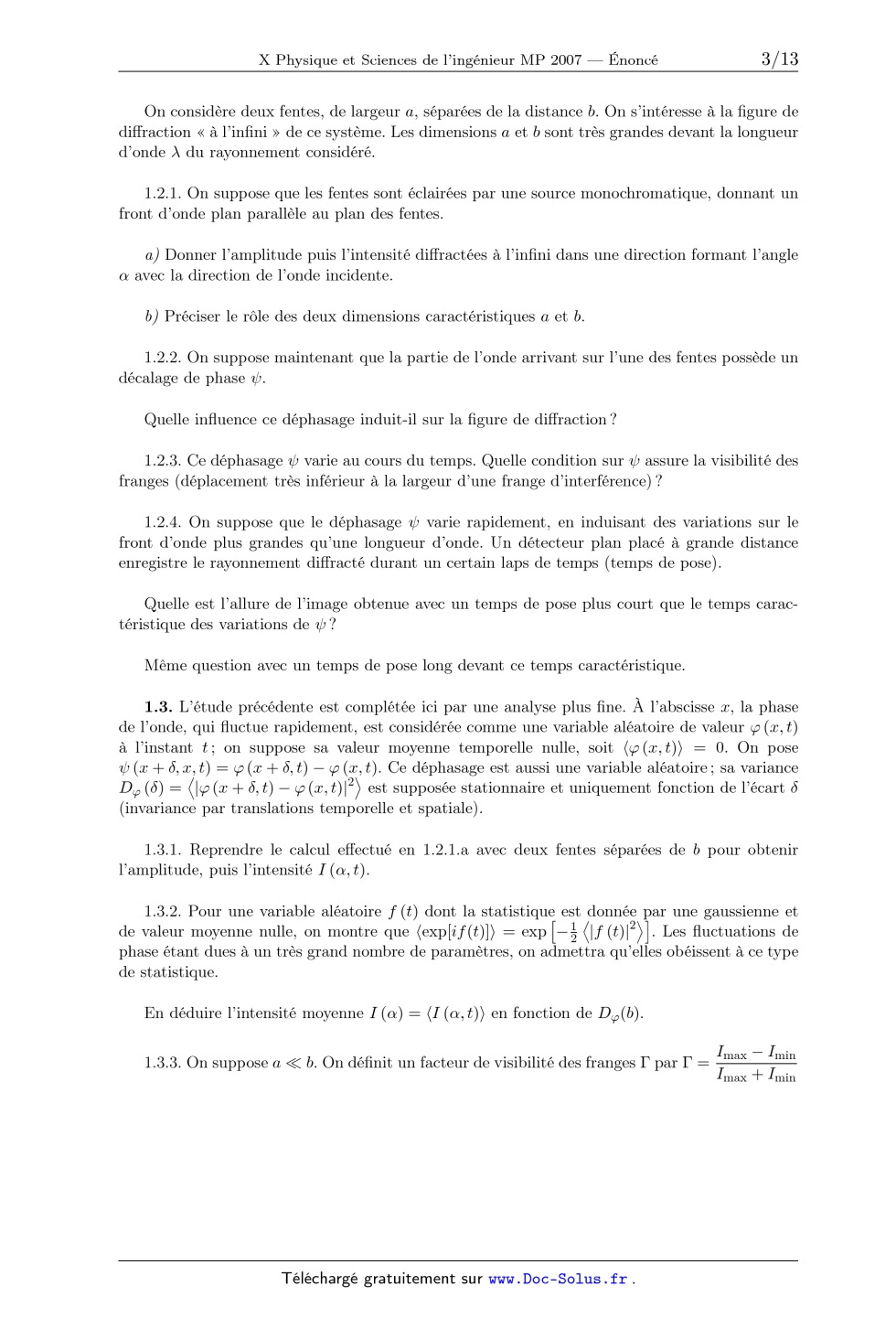
1.2. L'étude suivante a pour but de mettre en évidence l'un des aspects de la
dégradation de
l'image d'une source ponctuelle par la turbulence.
On considère deux fentes, de largeur &, séparées de la distance 19. On
s'intéresse a la figure de
diffraction << a l'infini >> de ce système. Les dimensions & et b sont très
grandes devant la longueur
d'onde À du rayonnement considéré.
1.2.1. On suppose que les fentes sont éclairées par une source monochromatique,
donnant un
front d'onde plan parallèle au plan des fentes.
@) Donner l'amplitude puis l'intensité diffractées a l'infini dans une
direction formant l'angle
& avec la direction de l'onde incidente.
b) Préciser le rôle des deux dimensions caractéristiques & et 19.
1.2.2. On suppose maintenant que la partie de l'onde arrivant sur l'une des
fentes possède un
décalage de phase @.
Quelle influence ce déphasage induit--il sur la figure de diffraction?
1.2.3. Oe déphasage @ varie au cours du temps. Quelle condition sur @ assure la
visibilité des
franges (déplacement très inférieur a la largeur d'une frange d'interférence) ?
1.2.4. On suppose que le déphasage @ varie rapidement, en induisant des
variations sur le
front d'onde plus grandes qu'une longueur d'onde. Un détecteur plan placé a
grande distance
enregistre le rayonnement diffracté durant un certain laps de temps (temps de
pose).
Quelle est l'allure de l'image obtenue avec un temps de pose plus court que le
temps carac--
téristique des variations de w ?
Même question avec un temps de pose long devant ce temps caractéristique
1.3. L'étude précédente est complétée ici par une analyse plus fine. À
l'abscisse a:, la phase
de l'onde, qui fluctue rapidement, est considérée comme une variable aléatoire
de valeur 90 (a:, t)
a l'instant t, on suppose sa valeur moyenne temporelle nulle, soit :
0. On pose
@ (a: + 5, a:, t) = 90 (a: + 5, t) -- 90 (a:, t). Oe déphasage est aussi une
variable aléatoire, sa variance
D.{) (5) : est supposée stationnaire et
uniquement fonction de l'écart 5
(invariance par translations temporelle et spatiale).
1.3.1. Reprendre le calcul effectué en 1.2.1.a avec deux fentes séparées de b
pour obtenir
l'amplitude, puis l'intensité [ (oz, 15).
1.3.2. Pour une variable aléatoire f (15) dont la statistique est donnée par
une gaussienne et
de valeur moyenne nulle, on montre que : exp {--% ].
Les fluctuations de
phase étant dues a un très grand nombre de paramètres, on admettra qu'elles
obéissent a ce type
de statistique.
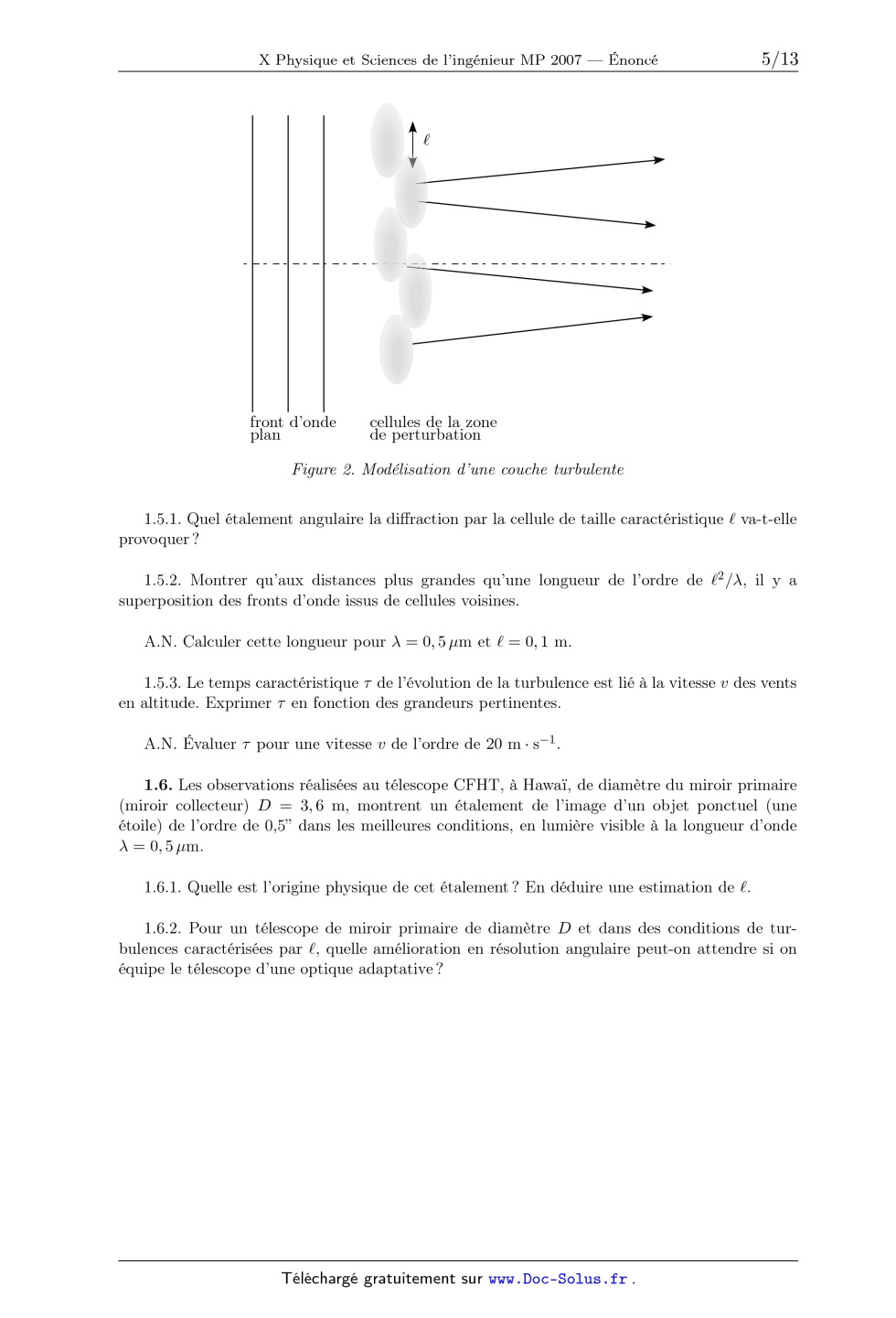
En déduire l'intensité moyenne 1 (a) = <] (oz, t)) en fonction de D@(b). Im x _ [min 1.3.3. On suppose & << 19. On définit un facteur de visibilité des franges F par F : Iaî max min où [max et [min sont les intensités d'un maximum et d'un minimum voisins. Exprimer F a l'aide de Dfi(b). 1.3.4. Une analyse théorique des fluctuations prévoit une variance de la forme 5/3 D./) (5) = ((S--) où 50 est une dimension caractéristique. Calculer en fonction de 50 la va-- leur Æ de b pour laquelle F = 0,1. Quel est l'intérêt de la comparaison de cette valeur avec le diamètre du miroir du télescope ? 1.4. Les perturbations dues a la turbulence sont liées aux variations d'indice de réfraction de l'air. Cet indice dépend de sa masse volumique p, via la relation empirique de Gladstone : n--1=Kp. 1.4.1. Exprimer n en fonction de la température T et de la pression p; on suppose que l'air, de masse molaire M, obéit a l'équation d'état du gaz parfait. Déterminer numériquement la constante K, sachant que, dans les conditions normales de pression et température (1, 013 >< 105 Pa, 293 K), 77. = 1, 00029. 1.4.2. Par rapport a une situation d'équilibre de l'atmosphère décrite par T(z) et p(z), des fluctuations de température et de pression se manifestent respectivement par des écarts (ST et 539. Exprimer la relation entre ces fluctuations et celles 577. de l'indice qu'elles induisent. A.N. On admet que l'équilibre en pression est, au regard des phénomènes étudiés, quasiment instantané. Quelle fluctuation d'indice découle d'une fluctuation de température 5T de 0,1 K d'une part au niveau de la mer (20°C), d'autre part a l'altitude correspondant a une pression de 100 hPa (--50°C) ? Pourquoi les couches les plus basses de l'atmosphère apportent-elles la plus forte contribution aux fluctuations d'indice ? 1.4.3. On suppose que l'essentiel de la perturbation d'indice (5n) provient d'une seule couche turbulente, de faible épaisseur h a l'altitude z0b3. Etablir l'expression de 5£, surcroît de chemin optique dû a 577. lors d'une traversée verticale. A.N. On mesure un décalage (% de l'ordre de 1 nm pour une perturbation limitée a une couche localisée près du sol de hauteur 30 m. En déduire la fluctuation relative de température associée a cette perturbation. 1.5. L'analyse effectuée en 1.3 permet de modéliser la couche turbulente par une juxtaposition de zones, appelées cellules, de taille caractéristique EUR (figure 2). On s'intéresse a la propagation d'une onde initialement plane, monochromatique de longueur d'onde À. Chaque cellule intro-- duit lors de la propagation un déphasage (par rapport au vide) fluctuant et incohérent avec les déphasages des cellules voisines. L'observation a lieu a une distance L de la couche turbulente. front d'onde cellules de la zone plan de perturbat10n F Zgure 2. Modélisation d'une couche turbulente 1.5.1. Quel étalement angulaire la diffraction par la cellule de taille caractéristique EUR va--t--elle provoquer ? 1.5.2. Montrer qu'aux distances plus grandes qu'une longueur de l'ordre de Æ2/À, il y a superposition des fronts d'onde issus de cellules voisines. A.N. Calculer cette longueur pour À : O, 5um et EUR = O, 1 m. 1.5.3. Le temps caractéristique T de l'évolution de la turbulence est lié a la vitesse @ des vents en altitude. Exprimer T en fonction des grandeurs pertinentes. A.N. Évaluer T pour une vitesse @ de l'ordre de 20 m - s_1. 1.6. Les observations réalisées au télescope CFHT, a Hawaï, de diamètre du miroir primaire (miroir collecteur) D = 3,6 m, montrent un étalement de l'image d'un objet ponctuel (une étoile) de l'ordre de 0,5" dans les meilleures conditions, en lumière visible a la longueur d'onde À : O, 5 nm. 1.6.1. Quelle est l'origine physique de cet étalement ? En déduire une estimation de EUR. 1.6.2. Pour un télesc0pe de miroir primaire de diamètre D et dans des conditions de tur-- bulences caractérisées par EUR, quelle amélioration en résolution angulaire peut--on attendre si on équipe le télescope d'une optique adaptative ? Figure 3. Image stellaire d'une même source ( a gauche, temps de pose très court; a droite, temps de pose long) 1.6.3. La figure 3 montre une tache image stellaire enregistrée dans deux situations distinctes ; la première image résulte d'une pose très courte, plus brève que T ; la deuxième correspond a une pose très longue par rapport a r. Expliquer l'allure de chacune des images, et leur différence. 2. Fonction de transfert d'un miroir déformable Le miroir déformable nécessaire a la correction du front d'onde perturbé est composé d'une membrane mince, réfléchissante sur sa partie supérieure (le miroir lui-même) a l'arrière de laquelle sont fixés des actionneurs qui viennent pousser ou tirer sur celle--ci (figure 4). On peut prévoir la réponse temporelle du miroir déformable d'une optique adaptative en étudiant le comportement d'une cellule élémentaire de ce miroir considérée comme découplée des autres et composée de la portion circulaire de la membrane comprise entre les actionneurs les plus proches autour d'un actionneur central (figure 4). De plus, ici nous réduirons le problème a une seule dimension : le déplacement a:(t) de la membrane selon l'axe perpendiculaire a celle--ci au droit de l'actionneur central. Figure 4. Photographie et schéma de principe de la membrane et des actionneurs ( le cercle représente une cellule élémentaire ) 2.1. Modélisation de la membrane Du point de vue mécanique, le comportement de la membrane de la cellule élémentaire peut être simplement modélisé par un système constitué d'une masse m, d'un ressort de raideur k et d'un amortisseur de coefficient visqueux ,u (figure 5). L'action mécanique de l'actionneur central --» sur le système est modélisée par un glisseur d'axe (0, a?) de résultante f (15) L'objet de l'étude est --» de déterminer le déplacement a:(t) par rapport a la position d'équilibre 5170, en fonction de f (15) m T--> X(t)
f(t)
XO _ 0
Figure 5. Modèle de la membrane du miroir
2.1.1. Écrire l'équation du mouvement du système.
2.1.2. À partir de cette équation, exprimer la fonction de transfert du système
D(p) : X (p) / F(p) Mettre cette expression sous forme canonique; donner son
ordre et l'ex--
pression des paramètres caractéristiques.
La raideur de la membrane est de la forme : k : 4E e3/R2 où e est l'épaisseur
de la mem--
brane, R la distance entre deux actionneurs proches et E le module d'Young du
matériau.
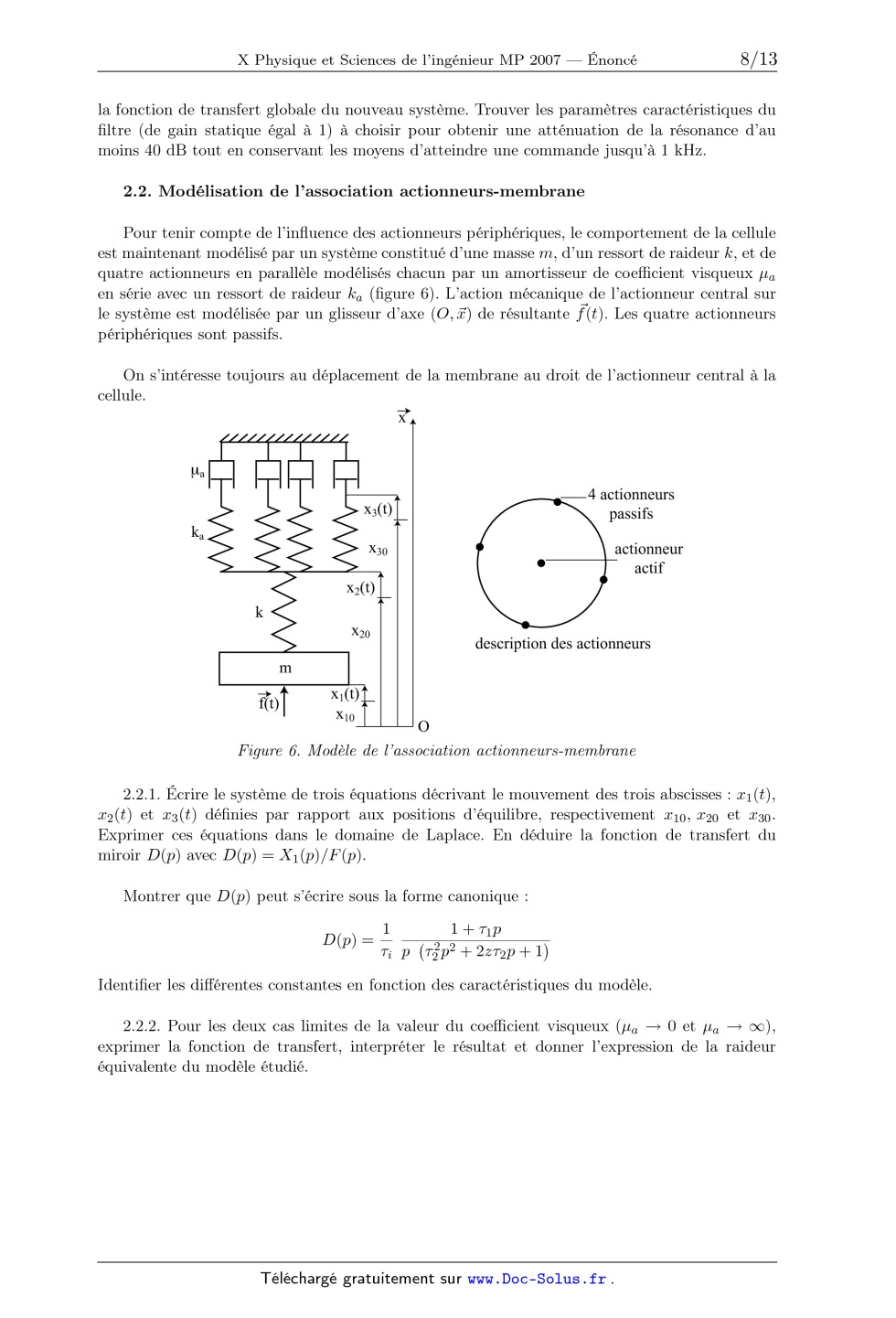
Pour une membrane en nickel : E = 2,1 >< 1011 N - m_2 et sa masse volumique : p= 8,9 >< 103 kg- m--3. On considère deux configurations différentes : -- la configuration numéro 1 pour laquelle : e = 1 mm, R = 0,8 cm et ,u = 10 N m_1 s -- la configuration numéro 2 pour laquelle : e = 0,08 mm, R = 1, 5 cm et ,u = 0,5 N m_1 s. 2.1.3. Pour les deux configurations, représenter sur un même graphe, le diagramme asymp-- totique de Bode de la fonction de transfert D(p), en précisant les valeurs numériques caractéris-- tiques. Donner l'allure des courbes réelles. Déterminer, le cas échéant, le coefficient de qualité. Commenter les différentes zones en pulsation de ces diagrammes. Quelle zone retenir pour le système ? 2 14. Quelle membrane choisir pour pouvoir commander le miroir jusqu'à des fréquences d'au moins 1 kHz ? Afin d'atténuer la résonance de ce miroir, on se propose de placer un filtre du deuxième ordre H (p) au sein de la boucle de commande en force de l'actionneur : donner l'expression de la fonction de transfert globale du nouveau système. Trouver les paramètres caractéristiques du filtre (de gain statique égal a 1) a choisir pour obtenir une atténuation de la résonance d'au moins 40 dB tout en conservant les moyens d'atteindre une commande jusqu'à 1 kHz. 2.2. Modélisation de l'association actionneurs--membrane Pour tenir compte de l'influence des actionneurs périphériques, le comportement de la cellule est maintenant modélisé par un système constitué d'une masse m, d'un ressort de raideur k, et de quatre actionneurs en parallèle modélisés chacun par un amortisseur de coefficient visqueux ua en série avec un ressort de raideur ka (figure 6). L'action mécanique de l'actionneur central sur --» le système est modélisée par un glisseur d'axe (0, a?) de résultante f (15) Les quatre actionneurs périphériques sont passifs. On s'intéresse toujours au déplacement de la membrane au droit de l'actionneur central a la cellule. A _4 actionneurs X3(t)jÎ passifs X30 actionneur A 8Ctlf X2(Û __ A k X20 . . . descr1pt1on des act10nneurs m Êt)T X1(Ü ;:_ X10 _» XA Ma ka 0 F igure 6. Modèle de l'association actionneurs-membrane 2.2.1. Écrire le système de trois équations décrivant le mouvement des trois abscisses : a:1(t), 51305) et 51305) définies par rapport aux positions d'équilibre, respectivement cr..., 51720 et 51:30. Exprimer ces équations dans le domaine de Laplace. En déduire la fonction de transfert du miroir D(p) avec D(p) : X1(p)/F(p). Montrer que D(p) peut s'écrire sous la forme canonique : 1 1 + T1}? T7; p (Tâp2 --l-- 2Z'7'2P + 1) D(p) = Identifier les différentes constantes en fonction des caractéristiques du modèle. 2.2.2. Pour les deux cas limites de la valeur du coefficient visqueux (,ua -->
0 et ua --> oo),
exprimer la fonction de transfert, interpréter le résultat et donner
l'expression de la raideur
équivalente du modèle étudié.
2.2.3. La raideur de la membrane est donnée) comme précédemment) par la relation
k : 4E eB/R2 et la raideur d'un actionneur par l'expression :
avec da : 5mm et La : 40 mm.
On considère la membrane de dimensions : e = 1 mm et R = 0, 8 cm et on retient
comme
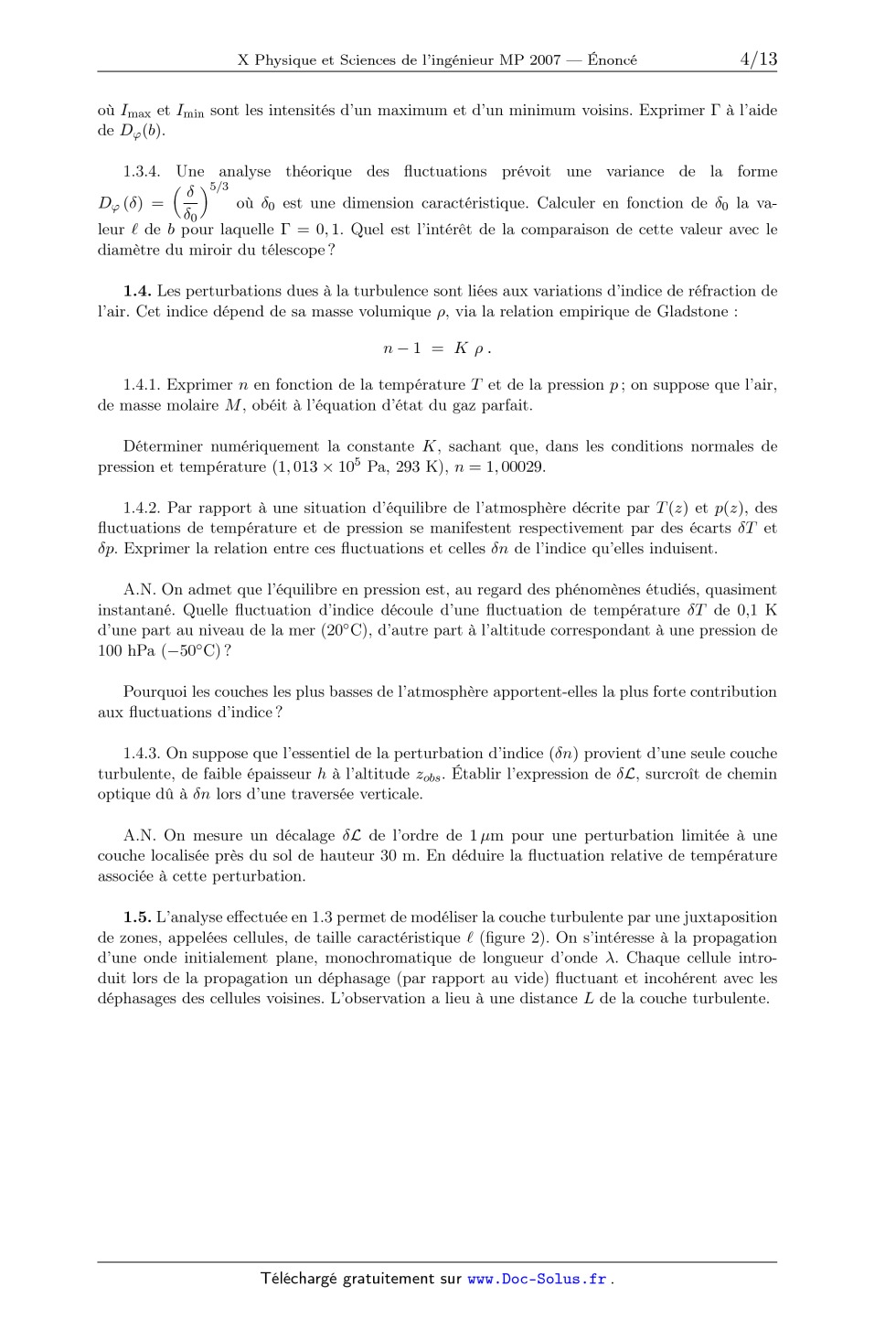
matériau pour l'actionneur, le PZT qui a comme caractéristiques : Ea : 5 >< 1010 N - m_2. Le coefficient visqueux pour la liaison membrane actionneur est égal a : ,ua : 1000 N - m_1 s. Calculer les différents paramètres caractérisant la fonction de transfert D(p). Tracer le diagramme asymptotique de Bode en notant les grandeurs caractéristiques. Com-- ment évolue ce diagramme si l'on augmente la valeur du coefficient visqueux? 3. Analyse du front d'onde perturbé La boucle d'optique adaptative inclut un analyseur de front d'onde qui en mesure les défauts. Deux modes de mesure des défauts sont analysés dans cette partie. Mesure de pentes sur le profil du front d'onde Le principe de l'analyseur de front d'onde de type Shack--Hartman est représenté par la figure 7. Une fraction du signal optique est prélevée et traverse une galette de N microlentilles. Chaque microlentille est de taille carrée, de côté a... de distance focale f. Les N microlentilles pavent un cercle de diamètre q : a.../4N/7r. F igure 7. Dispositif de Shaok-Hartman 3.1. Pour éclairer la galette de microlentilles7 le faisceau incident collecté par le miroir pri-- maire du télescope a été mis en forme par une optique secondaire. L'ensemble primaire + secon-- daire est modélisé par un montage afocal équivalent constitué de deux lentilles minces conver-- gentes, formant une lunette de grandissement angulaire G ; soit D le diamètre de la première lentille (égal au diamètre du miroir primaire). On suppose le diamètre de la seconde suffisamment grand pour n'intercepter aucun rayon ayant traversé la premiére. 3.1.1. La galette de microlentilles est placée dans le plan conjugué de la première lentille a travers la seconde. Justifier ce choix. 3.1.2. L'onde incidente étant inclinée d'un angle io, que devient l'inclinaison @ en sortie du montage afocal? Faire un schéma. 3.1.3. Quelle relation nécessaire et suffisante doit vérifier le grandissement G du montage afocal, pour un éclairement total de la galette, sans perte de lumière ? Faire un schéma. A.N. La turbulence est caractérisée par i0 : 0,8". L'optique adaptative alimente une galette de 200 microlentilles, chacune de côté au : 1 mm. Le miroir collecteur a un diamètre D = 3, 6 m. Calculer G et i. 3.2. On suppose qu'une microlentille analysant une fraction du front d'onde perturbé reste éclairée par une onde localement plane. 3.2.1. Montrer sur un schéma les différentes positions possibles de l'image dans le plan focal de la galette de microlentilles, générées par un front d'onde plan initialement orthogonal a l'axe, puis localement incliné d'un angle @ suite a la turbulence. En déduire le principe de la mesure. 3.2.2. Pour une longueur d'onde de 2um, comparer la dispersion angulaire de diffraction associée a une microlentille et celle due a la turbulence caractérisée par l'angle i, en utilisant les valeurs numériques de 3.1.3. En déduire la valeur maximale de la focale f,, des microlentilles, qui évite la confusion entre l'information donnée par deux microlentilles adjacentes, et la calculer. Mesure de courbure du profil du front d'onde Le dispositif présenté a la figure 8 permet de mesurer directement la courbure du front d'onde incident. Lorsqu'il est non perturbé, le front d'onde plan incident est focalisé au foyer F de la lentille. Un détecteur plan intercepte le faisceau alternativement en amont et en aval du foyer, sa position étant rapidement modulée d'un pas d de part et d'autre de F. V Figure 8. Capteur de courbure 10 3.3. Le faisceau incident, perturbé, n'est plus localement plan, il possède au niveau de la lentille une courbure C analogue a celle d'une calotte sphérique de rayon }) : C : 1/3), p étant algébrique et compté du sommet de la calotte vers le centre. 3.3.1. En quelle position p' , comptée a partir de la lentille, le faisceau converge--t--il ? Par la suite, on notera Ap' : p' -- f' , f' étant la distance focale image de la lentille. 3.3.2 . Le faisceau incident illumine en totalité la lentille d'aire A0. On néglige dans un premier temps tout effet diffractif. En déduire dans ce cas que les aires éclairées pour les deux positions du détecteur valent respectivement : dïAp' 2 Ai = A°(f+--Ap) ' 3.3.3. On ne néglige plus la diffraction. Montrer qu'alors il faut un pas de modulation suffi-- sament grand pour avoir un effet sensible. Déterminer la valeur d* de d en deçà de laquelle le rôle de la diffraction devient prépondérant, pour le cas Ap' : O. L'exprimer en fonction de la longueur d'onde À et du nombre d'ouverture NO : f'/a0, où dg est le diamètre de la lentille. A.N. Calculer d* dans le cas d'un nombre d'ouverture de 10 a la longueur d'onde de 2,0 ,um. Dans la suite, on suppose être dans le cas d >> d*.
3.3.4. Pour un éclairement uniforme, comment le flux collecté par unité de
surface du détec--
teur, Î, varie--t--il en fonction de Ai ?
3.3.5. On note A : (+ -- _)/(CI>+ + CIL) la différence relative entre
les flux collectés par
unité de surface. Exprimer A en fonction de d et Ap' .
3.3.6. La courbure mesurée est toujours très faible. Simplifier l'expression
précédemment
obtenue et l'exprimer en fonction de C , conclure.
4. Boucle d'asservissement de l'optique adaptative
4.1. Fonction de transfert des principaux éléments de la boucle
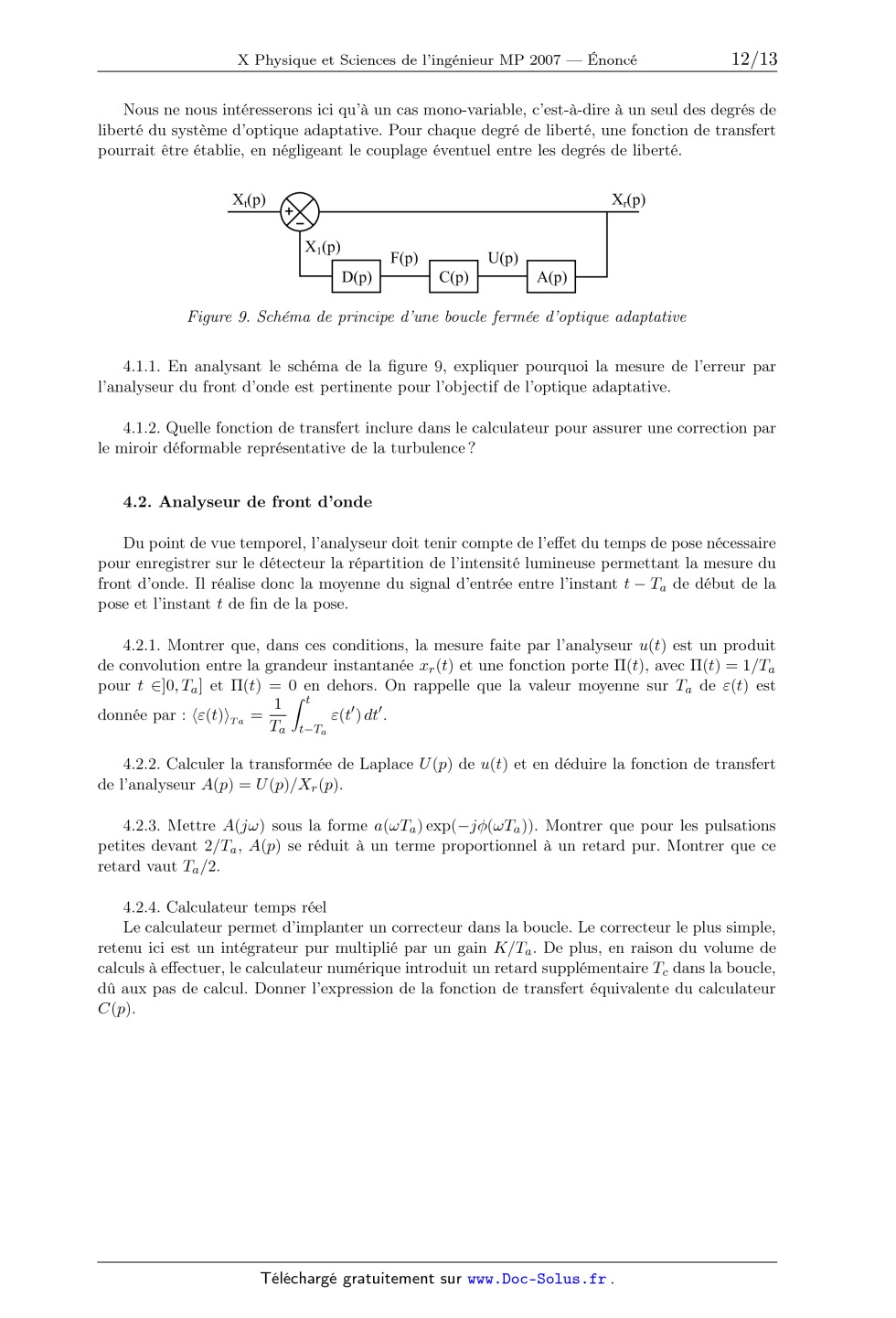
Le schéma de la boucle d'optique adaptative est donné a la figure 9. L'entrée
Xt(p) est le
front d'onde turbulent arrivant sur l'instrument, la sortie Xr(p) est le front
d'onde résiduel aprés
la correction effectuée par le miroir déformable. En effet, ce front d'onde
résiduel est la variable
pertinente pour déterminer la qualité de l'image qui sera observée au foyer de
l'instrument. Les
fonctions de transfert de l'analyseur du front d'onde, du calculateur et du
miroir déformable sont
notées repectivement A(p), C(p) et D(p).
11
Nous ne nous intéresserons ici qu'à un cas mono--variable, c'est--à--dire a un
seul des degrés de
liberté du système d'optique adaptative. Pour chaque degré de liberté, une
fonction de transfert
pourrait être établie, en négligeant le couplage éventuel entre les degrés de
liberté.
Xt(p) X,(p)
Xl(p' F) %>) A(p)
Figure 9. Schéma de principe d'une boucle fermée d'optique adaptative
4.1.1. En analysant le schéma de la figure 9, expliquer pourquoi la mesure de
l'erreur par
l'analyseur du front d'onde est pertinente pour l'objectif de l'optique
adaptative.
4.1.2. Quelle fonction de transfert inclure dans le calculateur pour assurer
une correction par
le miroir déformable représentative de la turbulence ?
4.2. Analyseur de front d'onde
Du point de vue temporel, l'analyseur doit tenir compte de l'effet du temps de
pose nécessaire
pour enregistrer sur le détecteur la répartition de l'intensité lumineuse
permettant la mesure du
front d'onde. Il réalise donc la moyenne du signal d'entrée entre l'instant t
-- Ta de début de la
pose et l'instant t de fin de la pose.
4.2.1. Montrer que, dans ces conditions, la mesure faite par l'analyseur u(t)
est un produit
de convolution entre la grandeur instantanée a:,(t) et une fonction porte H(t
), avec H(t ) : 1/Ta
pour t E]O,Ta ] et H(t) -- --0 en dehors. On rappelle que la valeur moyenne sur
Ta de e(t ) est
donnée par : (( )Ta =T--a --/ÎTae
4.2.2. Calculer la transformée de Laplace U (p) de u(t) et en déduire la
fonction de transfert
de l'analyseur A(p) : U(p)/XT (p)
4.2.3. Mettre A(jw) sous la forme a(wTa) exp(--jçb(wTa)). Montrer que pour les
pulsations
petites devant 2 / T... A(p) se réduit a un terme proportionnel a un retard
pur. Montrer que ce
retard vaut Ta / 2.
4.2.4. Calculateur temps réel
Le calculateur permet d'implanter un correcteur dans la boucle. Le correcteur
le plus simple,
retenu ici est un intégrateur pur multiplié par un gain K / Ta. De plus, en
raison du volume de
calculs a effectuer, le calculateur numérique introduit un retard
supplémentaire TC dans la boucle,
dû aux pas de calcul. Donner l'expression de la fonction de transfert
équivalente du calculateur
C(r)-
12
4.2.5. Miroir déformable
Nous avons vu dans 2.1.4 que la fonction de transfert du miroir D(p) est
modélisée par
une fonction du quatrième ordre. Cependant le modèle de comportement sur la
bande passante
souhaitée peut être assimilé a un second ordre. Exprimer cette fonction de
transfert dans sa
forme canonique avec un gain statique unitaire et préciser la fréquence de
coupure. Montrer que,
quand la pulsation du signal d'entrée est faible devant la pulsation propre, on
peut simplifier
considérablement l'expression de la fonction de transfert du miroir D(p).
4.3. Fonction de transfert de la boucle
4.3.1. Donner l'expression de la fonction de transfert en boucle ouverte H (p)
du système
représenté figure 9. En déduire la fonction de transfert T(p) : X,(p)/Xäp).
4.3.2. Dans le cas des faibles pulsations, montrer que l'expression de H (p)
peut s'écrire :
K T
H = l-- (--" T.) 1 -
(}?) Tap exp 2 + }?
Identifier les deux paramètres de H (p) Tracer l'allure du diagramme de Bode de
H (p) dans le
cas TC : Ta. Dans le cas général, donner l'expression de K en fonction de TC et
Ta pour que le
système soit stable. Trouver la valeur du gain K qui assure la stabilité de la
boucle avec une
marge de phase de 45°.
4.3.3. Dans le cas des faibles pulsations, donner l'expression de T (p) Tracer
l'allure générale de
son amplitude. Déterminer la pulsation de cassure en fonction des paramètres de
H (p) Comment
faire varier K pour minimiser les résidus de front d'onde en sortie? Est--ce
compatible avec la
stabilité ?
Quelle valeur de K choisir pour un fonctionnement optimal ? Donner la valeur de
la pulsation
de cassure de T(p) en considérant le gain statique K trouvé pour assurer la
stabilité.
Comment choisir T a pour minimiser l'erreur.
4.3.4. Quelle est la valeur de la pulsation de coupure wc a 0 dB en fonction
des paramètres
de H (p) dans le cas des faibles pulsations? Faire l'application numérique pour
Ta : 1 ms et
les deux cas TC : Ta et TC : 0, en prenant en compte le gain assurant la
stabilité. Comment
maximiser la bande passante ?
4.3.5. Calculer l'erreur statique pour une entrée indicielle. Le résultat
trouvé semble--t--il
conforme a l'objectif fixé a une optique adaptative? Quel élément de la boucle
permet d'as--
surer ce résultat ?
4.3.6. Quel correcteur ajouter dans le calculateur pour accroître la bande
passante tout en
assurant la stabilité de la boucle ? Le justifier et donner son expression.
13