
X Physique et Sciences de l'ingénieur MP 2013
| Thème de l'épreuve | Un transducteur électrodynamique: le haut-parleur |
| Principaux outils utilisés | induction, électricité, optique ondulatoire, mécanismes, asservissements |
| Mots clefs | haut-parleur, trancanneuse, passe-haut |
Corrigé
:👈 gratuite pour tous les corrigés si tu crées un compte
👈 l'accès aux indications de tous les corrigés ne coûte que 1 € ⬅ clique ici
👈 gratuite pour tous les corrigés si tu crées un compte
- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
👈 gratuite pour ce corrigé si tu crées un compte
- - - - - - - - - - - - - - - - - - - - - -
Énoncé complet
(télécharger le PDF)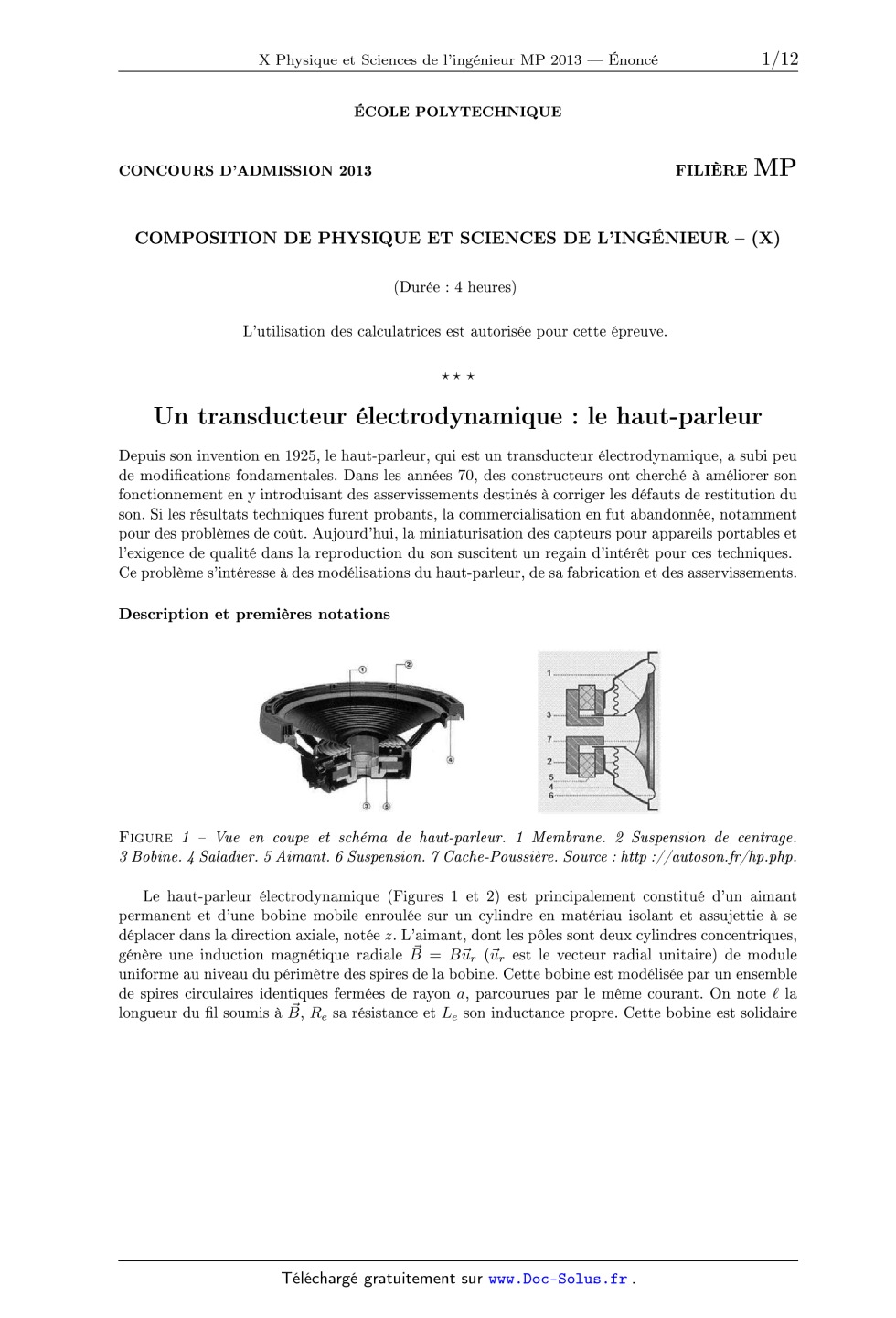






Rapport du jury
(télécharger le PDF)


Énoncé obtenu par reconnaissance optique des caractères
ÉCOLE POLYTECHNIQUE
CONCOURS D'ADMISSION 2013 FILIÈRE MP
COMPOSITION DE PHYSIQUE ET SCIENCES DE L'INGENIEUR -- (X)
(Durée : 4 heures)
L'utilisation des calculatrices est autorisée pour cette épreuve.
***
Un transducteur électrodynamique : le haut--parleur
Depuis son invention en 1925, le haut--parleur, qui est un transducteur
électrodynamique, a subi peu
de modifications fondamentales. Dans les années 70, des constructeurs ont
cherché a améliorer son
fonctionnement en y introduisant des asservissements destinés a corriger les
défauts de restitution du
son. Si les résultats techniques furent probants, la commercialisation en fut
abandonnée, notamment
pour des problèmes de coût. Aujourd'hui, la miniaturisation des capteurs pour
appareils portables et
l'exigence de qualité dans la reproduction du son suscitent un regain d'intérêt
pour ces techniques.
Ce problème s'intéresse a des modélisations du haut--parleur, de sa fabrication
et des asservissements.
Description et premières notations
FIGURE 1 -- Vue en coupe et schéma de haut--parleur. 1 Membrane. 2 Suspension
de centrage.
3 Bobine. 4 Saladier. 5 Aimant. 6 Suspension. 7 Cache-Poussière. Source : http
://autoson.fr/hp.php.
Le haut-parleur électrodynamique (Figures 1 et 2) est principalement constitué
d'un aimant
permanent et d'une bobine mobile enroulée sur un cylindre en matériau isolant
et assujettie a se
déplacer dans la direction axiale, notée z. L'aimant, dont les pôles sont deux
cylindres concentriques,
génère une induction magnétique radiale Ë : Bu} (il} est le vecteur radial
unitaire) de module
uniforme au niveau du périmètre des spires de la bobine. Cette bobine est
modélisée par un ensemble
de spires circulaires identiques fermées de rayon a, parcourues par le même
courant. On note EUR la
longueur du fil soumis a Ë , REUR sa résistance et LEUR son inductance propre.
Cette bobine est solidaire
Bobine mobile
' !
1
mobile
" Membrane
4--
Aimant permanent î
Suspensions élastiques
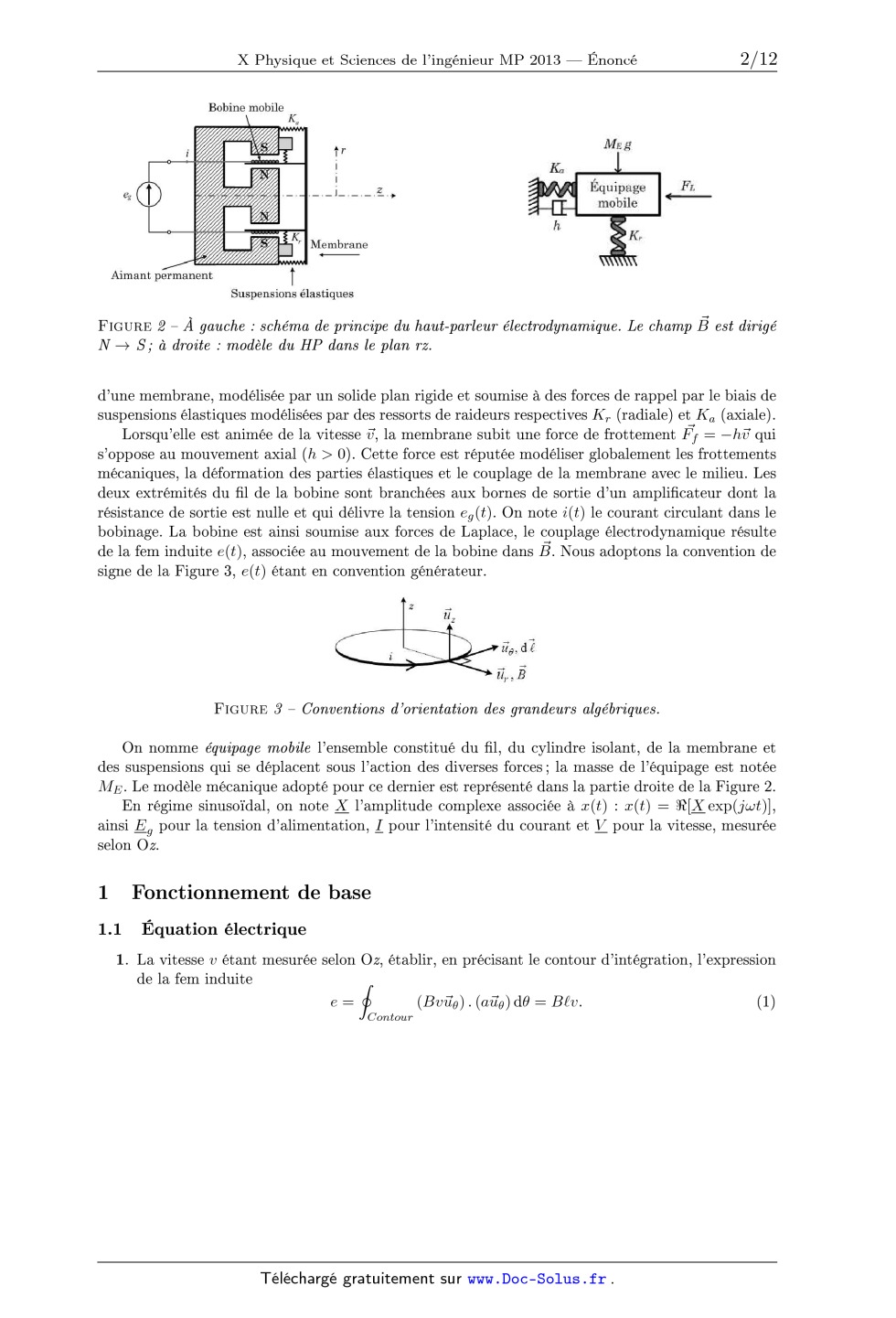
FIGURE 2 -- À gauche : schéma de principe du haut-parleur électrodynamiqae. Le
champ Ë est dirigé
N --> S; a droite : modèle du HP dans le plan rz.
d'une membrane, modélisée par un solide plan rigide et soumise a des forces de
rappel par le biais de
suspensions élastiques modélisées par des ressorts de raideurs respectives KT
(radiale) et Ka (axiale).
Lorsqu'elle est animée de la vitesse 17, la membrane subit une force de
frottement F} : --h17 qui
s'oppose au mouvement axial (h > 0). Cette force est réputée modéliser
globalement les frottements
mécaniques, la déformation des parties élastiques et le couplage de la membrane
avec le milieu. Les
deux extrémités du fil de la bobine sont branchées aux bornes de sortie d'un
amplificateur dont la
résistance de sortie est nulle et qui délivre la tension eg(t). On note i(t) le
courant circulant dans le
bobinage. La bobine est ainsi soumise aux forces de Laplace, le couplage
électrodynamique résulte
de la fem induite e(t), associée au mouvement de la bobine dans Ë . Nous
adoptons la convention de
signe de la Figure 3, e(t) étant en convention générateur.
FIGURE 3 -- Conventions d'orientation des grandeurs algébriqaes.
On nomme équipage mobile l'ensemble constitué du fil, du cylindre isolant, de
la membrane et
des suspensions qui se déplacent sous l'action des diverses forces; la masse de
l'équipage est notée
M E. Le modèle mécanique adopté pour ce dernier est représenté dans la partie
droite de la Figure 2.
En régime sinusoïdal, on note & l'amplitude complexe associée a a:(t) : a:(t) :
%[Â exp(jwt)],
ainsi EQ pour la tension d'alimentation, £ pour l'intensité du courant et K
pour la vitesse, mesurée
selon Oz.
1 Fonctionnement de base
1 . 1 Equation électrique
1. La vitesse @ étant mesurée selon Oz, établir, en précisant le contour
d'intégration, l'expression
de la fem induite
e =% (BmÏ9) . (aûb) d9 : BÆo. (1)
Contour
1.3
10.
11.
12.
13.
1.4
Établir l'équation différentielle, dite électrique et notée [E], reliant eg(t)
a i(t) et a v(t) en
fonction de Re, LEUR et de la grandeur oz : BÆ, caractéristique du dispositif.
. Déduire de l'équation [E] de la question 2 que, lorsque la tension
d'alimentation est sinusoïdale
d'amplitude complexe E9 et de pulsation ou, on a EQ : âEUR£ -- ozK, en
précisant l'expression de
ze (l'indice @ affectant l'impédance âEUR signifie ici électrique).
Equation mécanique
Donner, en fonction de i et de oz, l'expression de la force de Laplace F L qui
s'exerce sur la
bobine et préciser l'orientation de cette force.
Identifier par leur numéro, dans la partie droite de la Figure 1, les
suspensions élastiques
modélisées par des ressorts de raideurs respectives K,. et Ka.
L'équipage mobile est soumis a la pesanteur (g = 9, 8 m.s_2). Calculer le
défaut d'alignement
maximal, noté 56, de la bobine dans l'entrefer, pour ME : 7 g et K,. = 2.106
N.m_1. À titre
documentaire, l'amplitude des déplacements axiaux de la bobine est, pour le
haut-parleur et
le régime de fonctionnement qui nous intéressent ici, supérieure a 10_4 m.
On considère ici le mouvement axial de la membrane.
(a) A partir de la relation, que l'on vérifiera,
FL=ÎLU+MEÆ+KOE vdt (2)
établir l'équation différentielle, dite mécanique et notée [M], du problème.
(b) Exprimer l'équation (2) en régime permanent sinusoïdal sous la forme EL :
â...K en
précisant l'expression de £... (l'indice m signifie ici mécanique).
. Exprimer l'amplitude complexe, EL, de la force de Laplace en fonction de
l'amplitude complexe
. . V . . . Oz
£ du courant dans la bobine; exprimer le rapport ? ; vérifier la dimension du
rapport Z--.
_ --'ÏÏL
Pour quelle raison peut--on se limiter a l'étude du dispositif en régime
sinusoïdal forcé ?
Aspects énergétiques
Déduire de l'équation [E] de la question 2 un bilan énergétique électrique.
Déduire de la relation (2) de la question 7 (a) un bilan énergétique mécanique.
Que peut--on dire du couplage électromécanique, c'est--à--dire du transfert
énergétique entre la
puissance électrique de la fem induite associée au mouvement de l'équipage et
la puissance
mécanique des forces de Laplace ? Détailler alors la manière dont la puissance
délivrée par le
générateur se répartit entre formes mécaniques, magnétique et dissipatives.
Etablir que, en régime périodique (pas nécessairement harmonique), les valeurs
moyennes dans
le temps, calculées sur une période et notées (.), sont liées par la relation
(egi) : (Rei2) + (hv2) .
Phénoménologie de la suspension pneumatique en enceinte close
Le haut-parleur est fixé sur une enceinte close, le caisson, de volume au repos
Qg. La pression de
l'air extérieur est notée PO. Lorsque la membrane, assimilée a une surface
plane d'aire 2 se déplace
de la petite quantité 75, la variation de pression a l'intérieur du caisson est
notée p. L'évolution de
l'air confiné dans le caisson est isentropique.
14.
15.
Établir l'expression de la force pressante qui s'exerce sur la membrane sous la
forme Fp : --kz
en exprimant le en fonction PO, E, Qg et de l'indice isentropique v.
Vérifier la dimension de le et, a partir d'estimations de Pg,E et QQ, estimer
son ordre de
grandeur. Comparer votre résultat a Ka : 1, 2.103 N.m_1.
2 Impédance électrique du haut-parleur
En vue des asservissements, on veut caractériser le haut-parleur par des
mesures simples, dont
le principe est étudié ci--dessous.
2.1
16.
17.
18.
Schéma électrique équivalent du haut-parleur
On bloque l'équipage mobile et on alimente la bobine, d'abord avec un courant
continu, ensuite
avec un courant sinusoïdal.
(a) Montrer que l'on peut déduire de ces mesures les grandeurs Re et Le.
(b) On trouve R6 = 4 Q et LEUR : 0,1 mH. Sur quelle plage de fréquences lZEURl
s'écarte--t--il de
plus de 1% de Re ?
Le haut-parleur en question étant utilisé dans les graves, on ne tiendra
désormais plus
compte de Le, sauf à la question 24.
2
a --»
On pose R... : Î' où l'on rappelle que oz : BÆ et Ff : --hiî.
(a) Vérifier que la dimension de R... est celle d'une résistance.
(b) Montrer que, en régime permanent sinusoïdal, l'impédance âB : EQ / l ,
s'écrit, en termes
des paramètres w... et Q, dont on précisera l'expression et la signification
physique
E R w w
ZB=--9=Re+--m, avec 6...=1+J'Q ___..._ (3)
1 5... w... w
Dans le plan complexe, @... défini a la question 17 est représenté par une
droite A parallèle a
l'axe des imaginaires et d'abscisse unitaire. On admettra que l'inverse de 5...
est représenté par
le cercle de la figure 4.
&?
'.R
FIGURE 4 -- L'inverse d'une droite parallèle à l'aæe des ordonnées est le
cercle centré sur l'aæe des
abscisses, passant par l'origine et tangent a cette droite.
(a) Quelle est la partie utile de ce cercle ?
(b) Quelle est l'intérêt de cette représentation pour l'étude de l'impédance âB
?
w _ 1
19. Onposeoe=-- pu1sy=oe----.
w... a:
(a) Exprimer le module [ZB] et la phase gOB de ZB en fonction de y.
(b) Donner les valeurs de y pour lesquelles [ZB] est extrémal et les
expressions respectives,
[âBlmm et lÂ31maoe de ces extrema; quelle est la phase associée a chacun de ces
extrema?
2.2 Mesures électriques
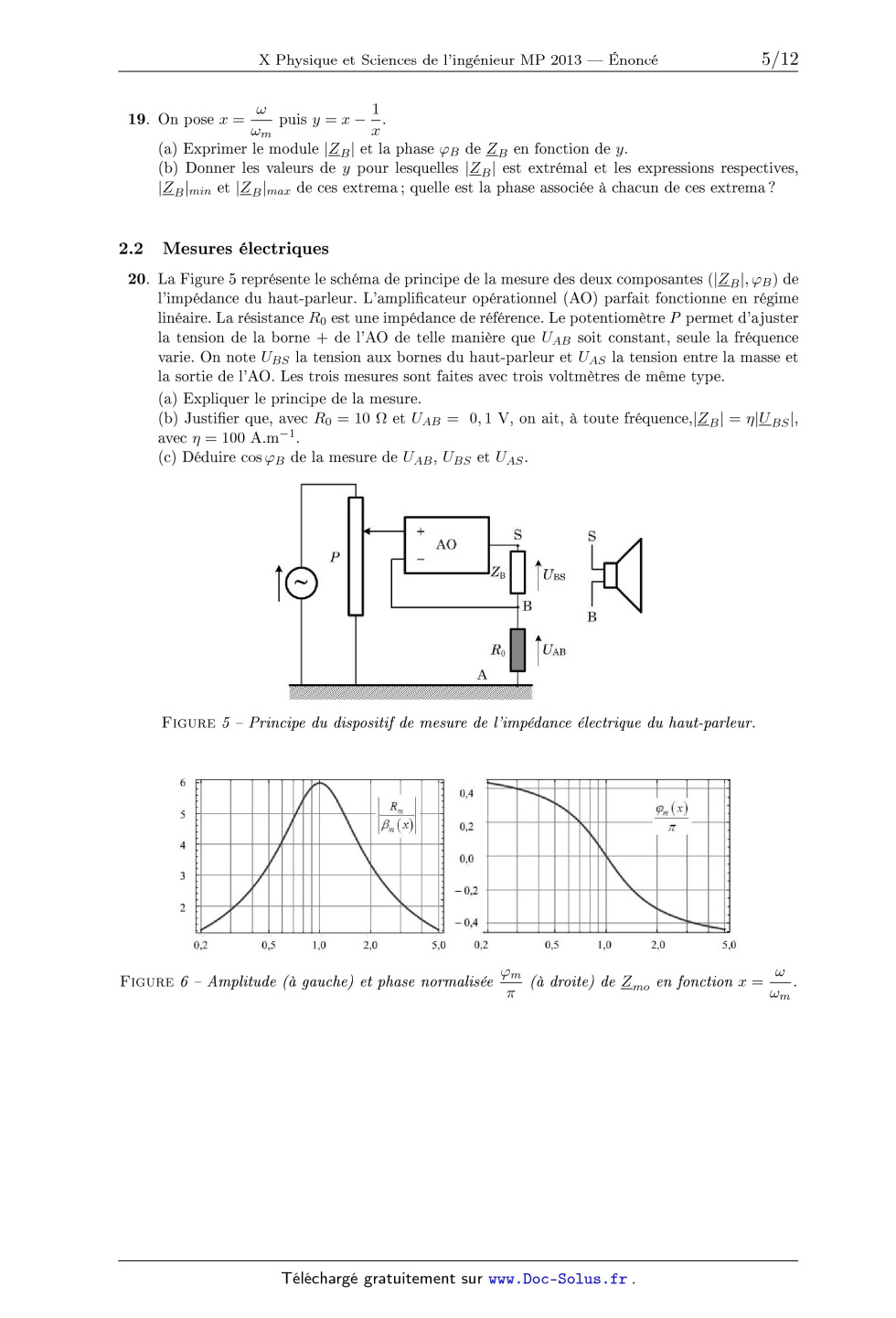
20. La Figure 5 représente le schéma de principe de la mesure des deux
composantes (lâBl, 903) de
l'impédance du haut--parleur. L'amplificateur opérationnel (AO) parfait
fonctionne en régime
linéaire. La résistance RO est une impédance de référence. Le potentiomètre P
permet d'ajuster
la tension de la borne + de l'AG de telle manière que U AB soit constant, seule
la fréquence
varie. On note U 35 la tension aux bornes du haut-parleur et U AS la tension
entre la masse et
la sortie de l'AG. Les trois mesures sont faites avec trois voltmetres de même
type.
(a) Expliquer le principe de la mesure.
(b) Justifier que) avec R0 = 10 Q et UAB = 0,1 V, on ait, a toute fréquence,]âä
: 77[Qle,
avec 77 = 100 A.m_1.
(c) Déduire cos gOB de la mesure de UAE, UBS et UAS.
+
AO S S
î ... ZB ÎUBB
B
__ _l__..._ _' _. _ \ l
0,4 \* 4
')
. . .
. _ :
. . . . . .
. . _. .
> . < \ ' A l , . . . 2 . f . . . "' .; \ ' . --0'4 ' \ " l 1 A l l A « | . l l .' 0.2 0,5 1.0 2.0 5.0 0.2 0.5 1.0 2.0 5,0 _ eu en fonctzon a: = --. wm FIGURE 6 -- Amplitude (& gauche) et phase normalisée 90--m (à droite) de Z... 7r O 21. La Figure 6 représente le résultat, après traitement, de mesures de la partie motionnelle de m l'impédance, z = -- R... et 5... ont été définis a la question 17 . "'° 5 (à?) m (a) Donner les expressions littérales des pulsations cul et @@ pour lesquelles la phase go... de cette grandeur vaut respectivement +7r/4 et --7T/4. (b) Comment déduire de ces deux pulsations la valeur du coefficient Q ? (c) Cette observation est--elle toujours possible ? 22. On dispose uniformément sur la membrane du haut-parleur un film souple de masse m. Justifier l'existence et donner l'expression de la nouvelle pulsation propre, notée w,,,, du système. 23. À partir des résultats des questions 17 a 22, déduire des données expérimentales l'ensemble des paramètres du système, a savoir M E, h, Ka et oz. Application numérique : f... = 50 Hz, Q : 1,m= 5 %, 'Z3'maoe _ 'âB'mzn : 6 Q et fm =45 HZ. 24. Les relations établies dans les questions précédentes de cette partie perdent de leur validité ou . . aux fréquences élevées (a: = -- >> 1 : déjà, on ne peut plus négliger le terme
Lew dû a
wm
l'inductance propre de la bobine; on peut en revanche négliger -- devant se et,
en référence aux
55
relations 3 de la question 17, convenir provisoirement que
Rm
Z = R + 'L au a: + --_. 4
_B e .7 e m 1 + ]QCÛ ( )
Pour une certaine valeur 5133 de a:, on observe sur un oscilloscope
fonctionnant en mode a:y (non
représenté sur la Fig. 5) que le courant et la tension aux bornes du
haut-parleur sont en phase.
(a) Que voit--on alors sur l'écran de l'oscilloscope ?
(b) Exprimer LEUR en fonction de R..., Q, w... et 553.
25. En raison de l'effet de peau, la relation (4) reste approchée : on
considère pratiquement que,
dans un conducteur de conductivité o et en régime sinusoïdal de fréquence f,
seule la partie
15915 . . . .
extérieure d'épaisseur (ô)mm : _ contribue a la conduction. La résistance
effective
0 ' (f)kHz
du fil est--elle augmentée ou diminuée du fait de l'effet de peau ?
2.3 Mesures interférométriques
Pour mesurer la vitesse et le déplacement de la membrane sans perturber la
masse du haut--
parleur, on utilise la technique sans contact de vibrométrie laser décrite
ci--après.
L'interféromètre de Michelson de la Figure 7 est réglé pour donner des anneaux.
Un bloc séparatrice--
compensatrice, (SO), est inséré dans le dispositif, de telle sorte que les
faisceaux réfléchis par (M)
et le haut-parleur (HP) soient perpendiculaires. On s'efforce de faire en sorte
que les différents
faisceaux subissent le même nombre de réflexions et de réfractions et que les
amplitudes dans cha--
cun des bras de l'interféromètre soient égales. On convient pour simplifier que
l'indice dans l'in--
terféromètre est partout égal a 1, ce qui revient a confondre les chemins
géométrique et optique.
On note dâ' et dg les distances correspondant a la configuration de repos du
système et l'on pose
47T
\Ïfo = Î (d(1' -- d3) : 2q (d? -- dg) (ce qui définit q en fonction de la
longueur d'onde, À, de la source
monochromatique utilisée).
2.3.1 Analyse temporelle : mesure de l'amplitude vibratoire
L'objet de la Figure 7 est la membrane du haut--parleur.
A = Miroir (M)
d. \
d:
4--9
| LASER } î Objet
(Li) Bloc Séparatrice-
compensatrice (SC)
[:| Photodétecteur (:P)
FIGURE 7 -- Principe de fonctionnement d'un vibromètre laser. L'ensemble
laser--élargisseur de fais-
ceau est symbolisé par une source ponctuelle placée au foyer objet d'une
lentille convergente L1. Le
faisceau de référence est dirigé vers le miroir fire (M) tandis que l'autre
faisceau est envoyé en
incidence normale vers le centre de l'objet. Dans la partie 2.3.1, cet objet
est la membrane du
haut--parleur; dans la partie 2.3.2, cet objet est un petit miroir plan. Le
faisceau sortant de l'interfé--
romètre est détecté sur le photodétecteur (P), qui produit une tension VD
proportionnelle à l'intensité
lumineuse qu'il reçoit.
26. Commenter l'expression (5) ci--dessous de la tension de repos V3, en
indiquant respectivement
le sens et l'origine du coefficient m0 et celui de l'argument de la fonction
cosinus. À quoi peut
être due une valeur de m0 différente de 1 ?
V3 = VO (1 + m0 eos \110) . (5)
27. La position au repos du dispositif étant, dans cette question seulement,
telle que l'ordre d'in--
terférence en P soit nul, la membrane du haut-parleur est mise en vibration
harmonique :
d1 (t) = dä' + 51 cos(wt). Montrer que l'on peut déterminer 51 en comptant le
nombre n de
cycles complets (27T) de rotation de phase du signal VD produit par le
photodétecteur au cours
d'une période de vibration de la membrane.
28. Calculer 51 pour n = 28 et À = 0,65 um.
2.3.2 Analyse spectrale : mesure de la fréquence vibratoire
Le haut-parleur de la Figure 7 est remplacé ici par un petit miroir plan.
L'interféromètre est alors
exposé a l'onde acoustique émise par le haut-parleur (mais il est isolé
mécaniquement de ce der--
nier). Cette onde oscille harmoniquement a la pulsation w. On admet qu'elle
introduit un déphasage
supplémentaire \11 = sz cos(wt) dans l'expression de la phase relative entre
les deux faisceaux de
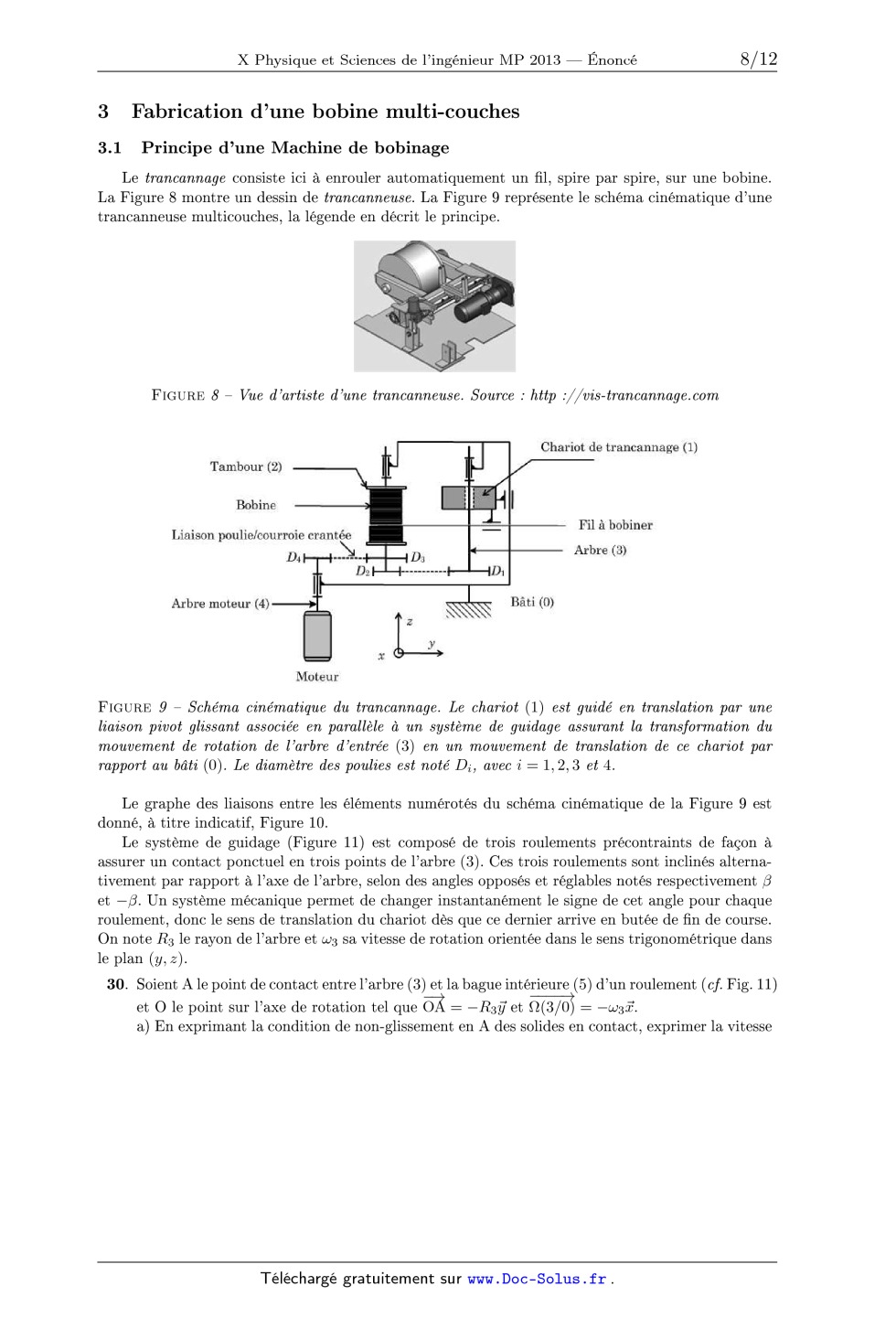
l'interféromètre, avec |zb...| << 1. L'origine de cette modulation de phase inclut la modulation des trajets optiques. On pose ainsi VD = VO [1 + m0 eos (\110 + ibM cos wt)] . (6) 29. Comment l'analyse de VD renseigne--t--elle sur l'état vibratoire de la membrane ? 3 Fabrication d'une bobine multi--couches 3.1 Principe d'une Machine de bobinage Le trancannage consiste ici a enrouler automatiquement un fil, spire par spire, sur une bobine. La Figure 8 montre un dessin de trancanneuse. La Figure 9 représente le schéma cinématique d'une trancanneuse multicouches, la légende en décrit le principe. FIGURE 8 -- Vue d'artiste d'une trancanneuse. Source : http ://vis-trancannage.com lÜl'iariot de tranoannage {1} Tambour {ï} Bobine Fil e bobine:- .Ëu*bre (E} Liaison poulietoourroie crantée D--l Bâti ro: Arbre moteur {4} l'a. .? l_'>
x
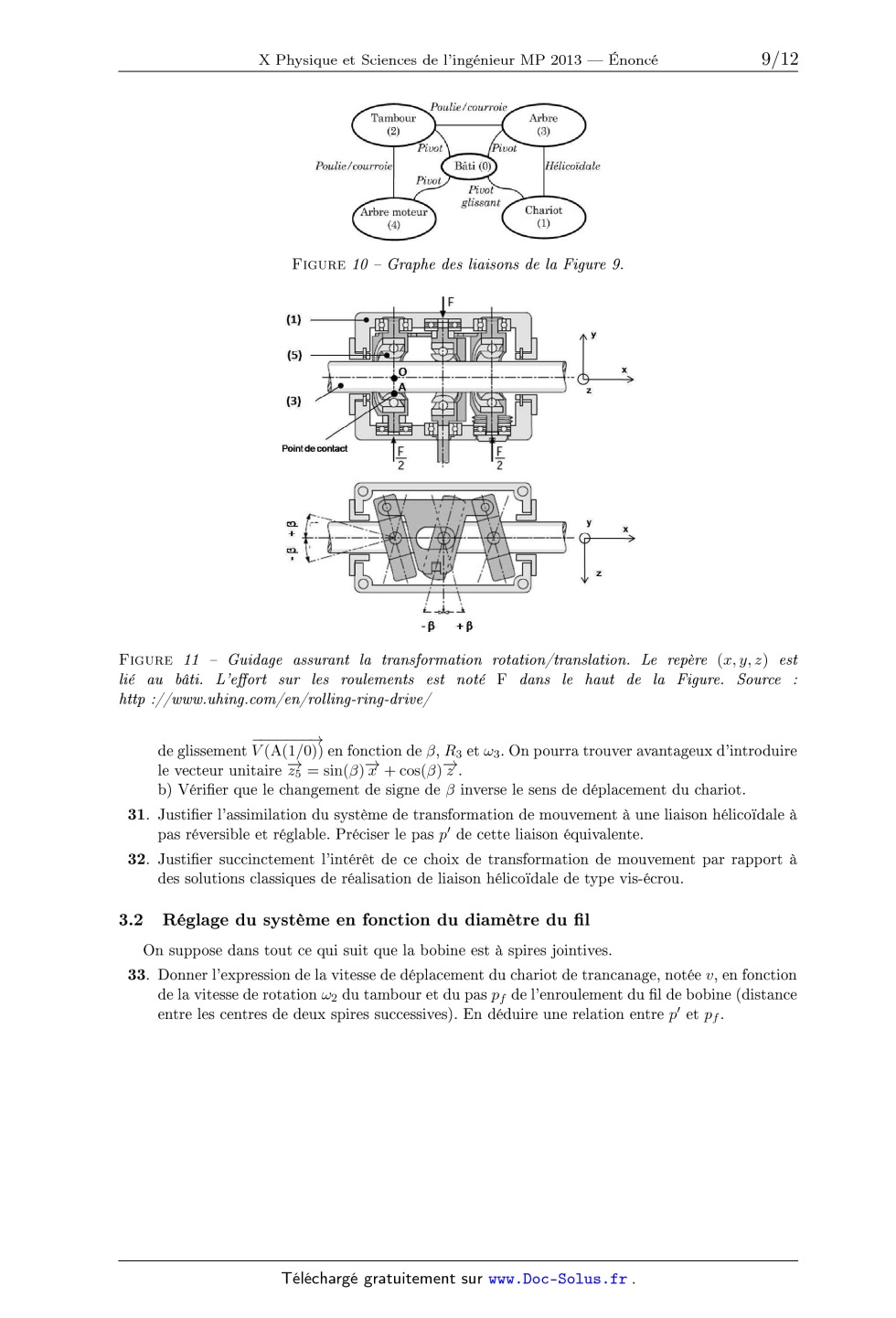
FIGURE 9 -- Schéma cinématique du trancannage. Le chariot (1) est guidé en
translation par une
liaison pivot glissant associée en parallèle à un système de guidage assurant
la transformation du
mouvement de rotation de l'arbre d'entrée (3) en un mouvement de translation de
ce chariot par
rapport au bâti (O). Le diamètre des poulies est noté D,, avec i = 1, 2,3 et 4.
Moteur
Le graphe des liaisons entre les éléments numérotés du schéma cinématique de la
Figure 9 est
donné, a titre indicatif, Figure 10.
Le système de guidage (Figure 11) est composé de trois roulements précontraints
de façon à
assurer un contact ponctuel en trois points de l'arbre (3). Ces trois
roulements sont inclinés alterna--
tivement par rapport à l'axe de l'arbre, selon des angles opposés et réglables
notés respectivement 6
et --Ô . Un système mécanique permet de changer instantanément le signe de cet
angle pour chaque
roulement, donc le sens de translation du chariot dès que ce dernier arrive en
butée de fin de course.
On note R3 le rayon de l'arbre et w3 sa vitesse de rotation orientée dans le
sens trigonométrique dans
le plan (y, z).
30. Soient A le point de contact entre l'arbre (3) et la bague intérieure (5)
d'un roulement (cf. Fig. 11)
-->
et O le point sur l'axe de rotation tel que OA : --R3ÿ' et Q(3/Ol = --w3aÊ'.
a) En exprimant la condition de non--glissement en A des solides en contact,
exprimer la vitesse
Poulie/ courroie
Tambour
(2)
Hélicoïdale
Paul ie / courroie
glissant
Chariot
(1)
Arbre moteur
(4)
FIGURE 10 -- Graphe des liaisons de la Figure 9.
(1)
(5)
(3)
Point de contact
N'fl
FIGURE 11 -- Guidage assurant la transformation rotation/translation. Le repère
(oe,y,z) est
lié au bâti. L'efiort sur les roulements est noté F dans le haut de la Figure.
Source
http ://www.uhing.corn/en/rolling-ring-driue/
de glissement V(A(1/O) ) en fonction de £, R3 et w3. On pourra trouver
avantageux d'introduire
le vecteur unitaire .z_5> : sin(fl)Î + cos(fl)Y.
b) Vérifier que le changement de signe de 5 inverse le sens de déplacement du
chariot.
31. Justifier l'assimilation du système de transformation de mouvement a une
liaison hélicoïdale a
pas réversible et réglable. Préciser le pas p' de cette liaison équivalente.
32. Justifier succinctement l'intérêt de ce choix de transformation de
mouvement par rapport a
des solutions classiques de réalisation de liaison hélicoïdale de type
vis--écrou.
3.2 Réglage du système en fonction du diamètre du fil
On suppose dans tout ce qui suit que la bobine est a spires jointives.
33. Donner l'expression de la vitesse de déplacement du chariot de trancanage,
notée u, en fonction
de la vitesse de rotation w2 du tambour et du pas pf de l'enroulement du fil de
bobine (distance
entre les centres de deux spires successives). En déduire une relation entre p'
et pf.
34. Déduire des questions précédentes la relation permettant de régler l'angle
6 pour la réalisation
d'une bobine constituée d'un fil de diamètre d.
35. Calculer l'angle 6 permettant de réaliser une bobine constituée d'un fil de
diamètre d = 0, 8 mm.
On donne R3 = 10 mm, D1 : 64 mm, D2 : 16 mm, D3 : 80 mm et D4 : 16 mm.
36. Le système de réglage fait que l'angle 6 ne peut prendre que des valeurs
discrètes. Quelles
modifications peut--on apporter au système et/ou sur quels composants
mécaniques peut--on
facilement agir afin d'adapter le mouvement de trancannage au diamètre du fil ?
4 Asservissements du haut-parleur
37. Quels phénomènes physiques, ignorés ici, peuvent--ils altérer la fidélité
de la réponse du haut--
parleur par rapport a son alimentation électrique ?
Dans ce qui suit, nous intéresserons a des principes d'asservissement par gain
(sans correcteur),
sans nous préoccuper des types de capteurs qui les réalisent, ni des critères
de choix en faveur
de tel ou tel type, ni du lien précis entre la grandeur détectée par les
capteurs et l'état vibratoire
de la membrane.
4.1 Préliminaire : Courbe de réponse de la membrane
La grandeur provisoirement considérée ici comme pertinente pour la restitution
du signal sonore
est l'accélération de la membrane, notée a dont l'amplitude complexe est notée
A. En considérant
V
d'une part l'expression de ? obtenue a la question 8, d'autre part celle 23
obtenue a la question 17,
on trouve (et l'on admettra) que, en termes de la variable de Laplace s,
l'expression de la fonction
de transfert en boucle ouverte H A(s) : A/ Eg est
Hoes2
ÿ :
A(S) 82--l--2Ç0me--I--wäl'
(7)
1 m
avecHoe=RîM et ÇO=Ë(1+ÎÈEUR)°
N 1
38. Donner l'allure de lHA(jw)l pour CD = --2. Pour un haut--parleur, est--il
avantageux que la
courbe de gain soit plate ou piquée ?
4.2 Asservissement de vitesse
Conformément au principe et au schéma fonctionnel représentés Figure 12, un
capteur externe
détecte la vitesse de la membrane et réinjecte en contre--réaction a l'entrée
la grandeur électrique
représentant cette vitesse. On note K1 (en V.s.m_1) la valeur du gain en
contre--réaction.
39. Exprimer la fonction de transfert ÎÏ21(3) : Â/Ëg en boucle fermée sous la
forme
N H182
HA1 : 2 2 .
8 --l--2C1wis--l--w1
(8)
40. Comparer H1, Ç1 et cul respectivement aux grandeurs Hoc, CO et au... de la
relation (7). En
déduire les modifications apportées par cet asservissement par rapport au
fonctionnement en
boucle ouverte, tant pour la courbe de réponse harmonique que pour la réponse
transitoire a
un échelon.
10
Capteur Eg ... V A
de v1tesse H V 8 --'
Ki
FIGURE 12 -- Principe et schéma fonctionnel de l'asseruissement en vitesse du
haut-parleur.
41. La partie droite de la Figure 12 montre que l'accélération se déduit de la
vitesse par le biais
d'un filtre dérivateur. Cette manière de faire vous semble--t--elle
pratiquement avantageuse ?
4.3 Asservissement d'accélération
On réalise a présent une contre--réaction en détectant l'accélération. On note
K 2 la valeur du gain
de la boucle en contre--réaction.
42. Représenter le schéma fonctionnel du système. En déduire la fonction de
transfert ÎÏÂZ en
boucle fermée sous la forme
N H252
HA2 : 2 2 .
8 --l-- 2Ç2oe28 --l-- w2
43. Comparer H2, @ et @@ aux grandeurs Hoe, CO et au... de la relation (7). En
déduire les modi--
fications apportées par cet asservissement par rapport au fonctionnement en
boucle ouverte,
tant pour la courbe de réponse harmonique que pour la réponse transitoire a un
échelon.
4.4 Asservissement mixte par matériaux actifs
Il est avantageux, pour augmenter la bande passante, sans modifier
l'amortissement, de combiner
les deux systèmes d'asservissement des deux parties précédentes. Pour ce but,
un matériau actif est
collé sur la membrane du haut--parleur.
lf'r 4:=KV
KI " '
Ë:a
u=ü : K2-£â
FIGURE 13 -- Membrane de haut-parleur recouverte d'un matériau actif.
Oe matériau (Figure 13) délivre, après traitements électroniques appropriés,
deux tensions en
sortie : uv : K1V et ua : K2A, où les coefficients K sont respectivement les
efficacités en vitesse
et en pression. On réalise la contre--réaction mixte en injectant la tension u
: uv + ua a l'entrée du
haut--parleur.
44. Quel est l'avantage de disposer d'un capteur de pression directement sur la
membrane, plutôt
qu'à une distance finie de celle--ci ?
45. Représenter le schéma fonctionnel du système.
11
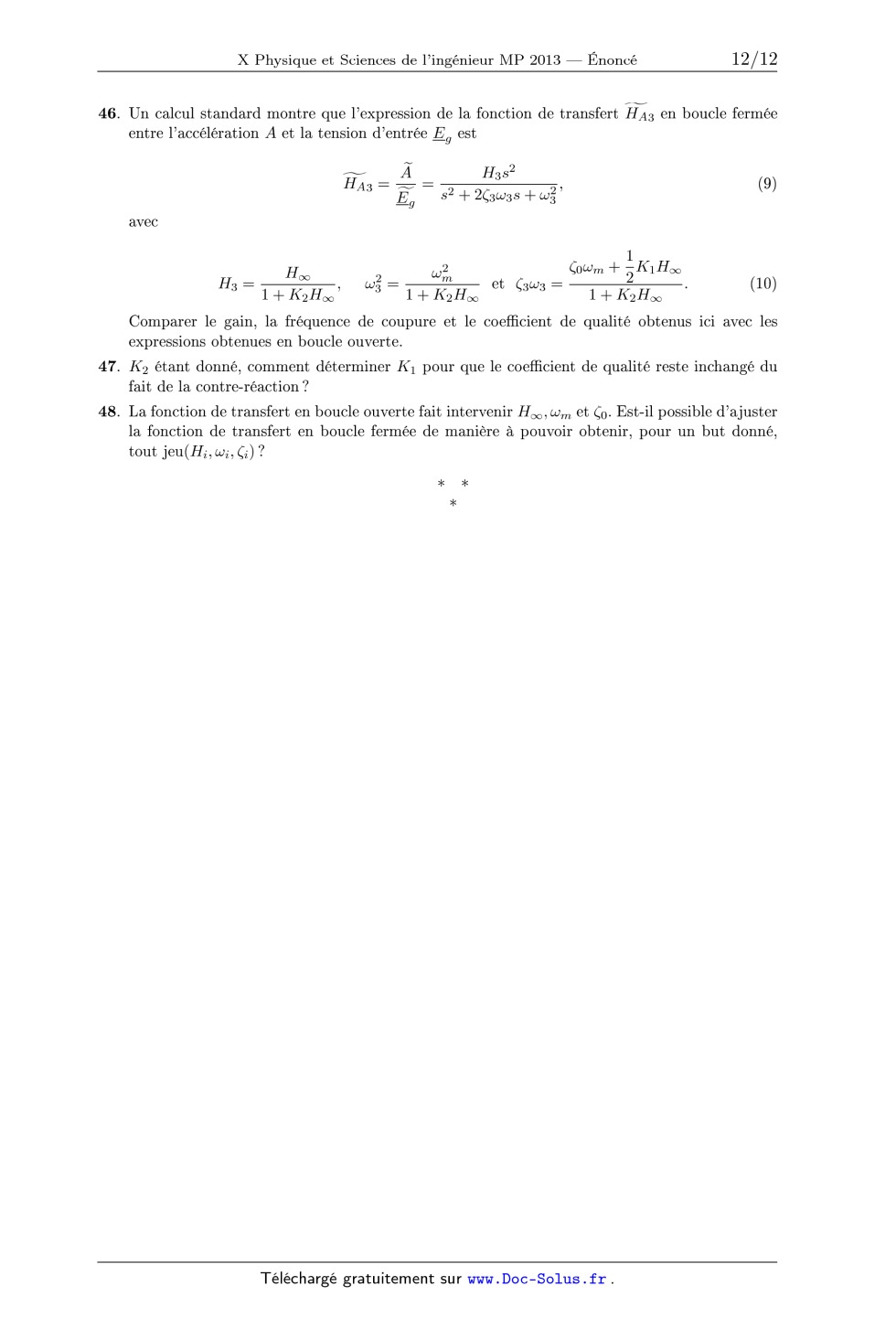
46. Un calcul standard montre que l'expression de la fonction de transfert ÎÎ23
en boucle fermée
47.
48.
entre l'accélération A et la tension d'entrée EQ est
N Â H382
HA3 : î : 2 27
_ 8 +2Ç3w33+w3
aVEURC
1
Hoo w2 Ç0wm + äK1HOO
H3 : _, wâ : _... et Ç3W3 =
1+K2HOO 1+K2HOO 1+K2HOO
(9)
(10)
Comparer le gain) la fréquence de coupure et le coefficient de qualité obtenus
ici avec les
expressions obtenues en boucle ouverte.
K2 étant donné) comment déterminer K1 pour que le coefficient de qualité reste
inchangé du
fait de la contre--réaction ?
La fonction de transfert en boucle ouverte fait intervenir Hoc, w... et Cg.
Est--il possible d'ajuster
la fonction de transfert en boucle fermée de manière a pouvoir obtenir) pour un
but donné7
tOut jEURU(Hi, wi, Ci) ?
12