
X Physique et Sciences de l'ingénieur MP 2017
| Thème de l'épreuve | Modélisation et applications d'un transducteur électroacoustique. Étude d'une tour de très grande hauteur. |
| Principaux outils utilisés | mécanique, optique ondulatoire, asservissements |
| Mots clefs | transducteur électroacoustique, masse-ressort |
Corrigé
:👈 gratuite pour tous les corrigés si tu crées un compte
👈 l'accès aux indications de tous les corrigés ne coûte que 1 € ⬅ clique ici
👈 gratuite pour tous les corrigés si tu crées un compte
- - - - - - - - - - - - - - - - -
👈 gratuite pour ce corrigé si tu crées un compte
- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
Énoncé complet
(télécharger le PDF)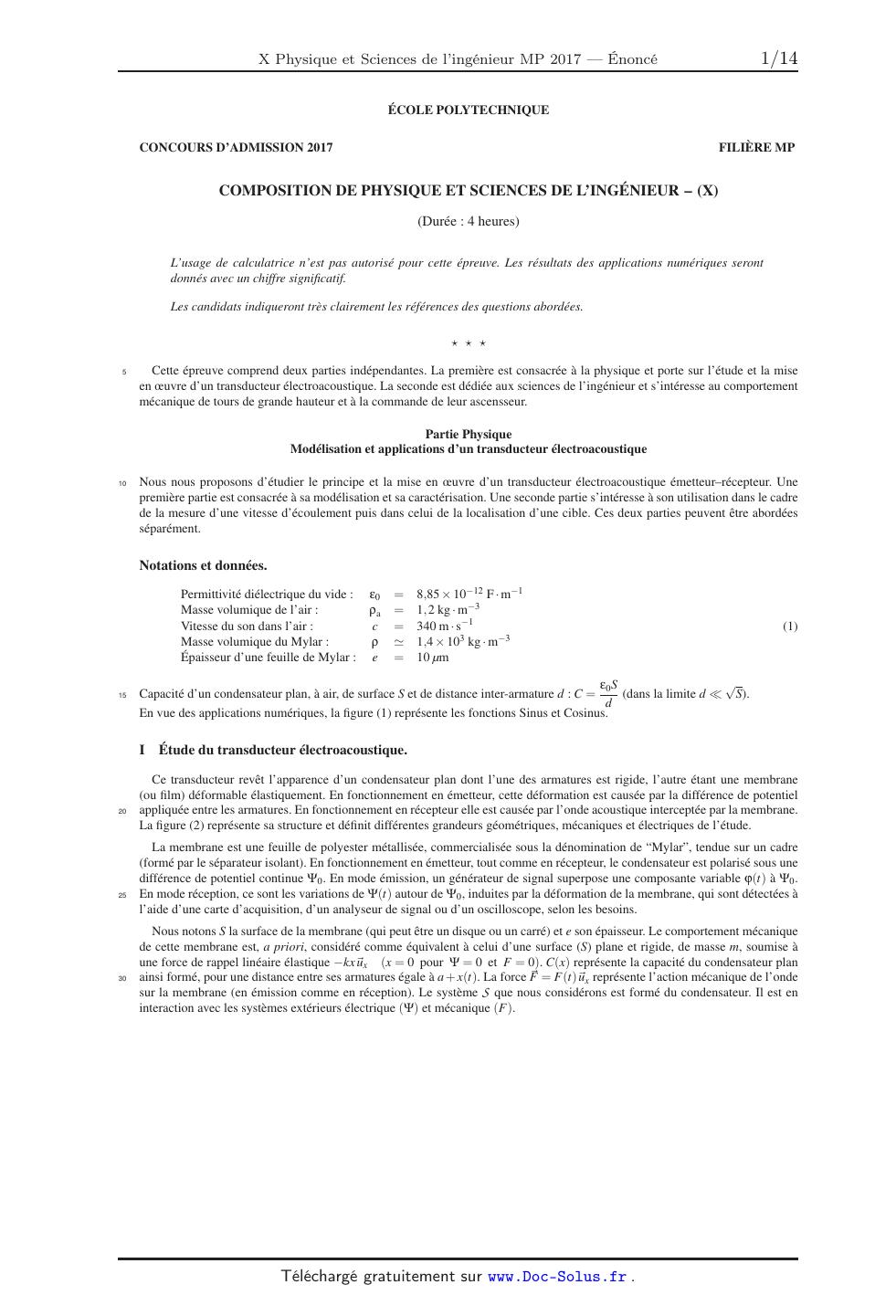








Rapport du jury
(télécharger le PDF)

Énoncé obtenu par reconnaissance optique des caractères
ÉCOLE POLYTECHNIQUE
CONCOURS D'ADMISSION 2017
FILIÈRE MP
COMPOSITION DE PHYSIQUE ET SCIENCES DE L'INGÉNIEUR (X)
(Durée : 4 heures)
L'usage de calculatrice n'est pas autorisé pour cette épreuve. Les résultats
des applications numériques seront
donnés avec un chiffre significatif.
Les candidats indiqueront très clairement les références des questions abordées.
5
Cette épreuve comprend deux parties indépendantes. La première est consacrée à
la physique et porte sur l'étude et la mise
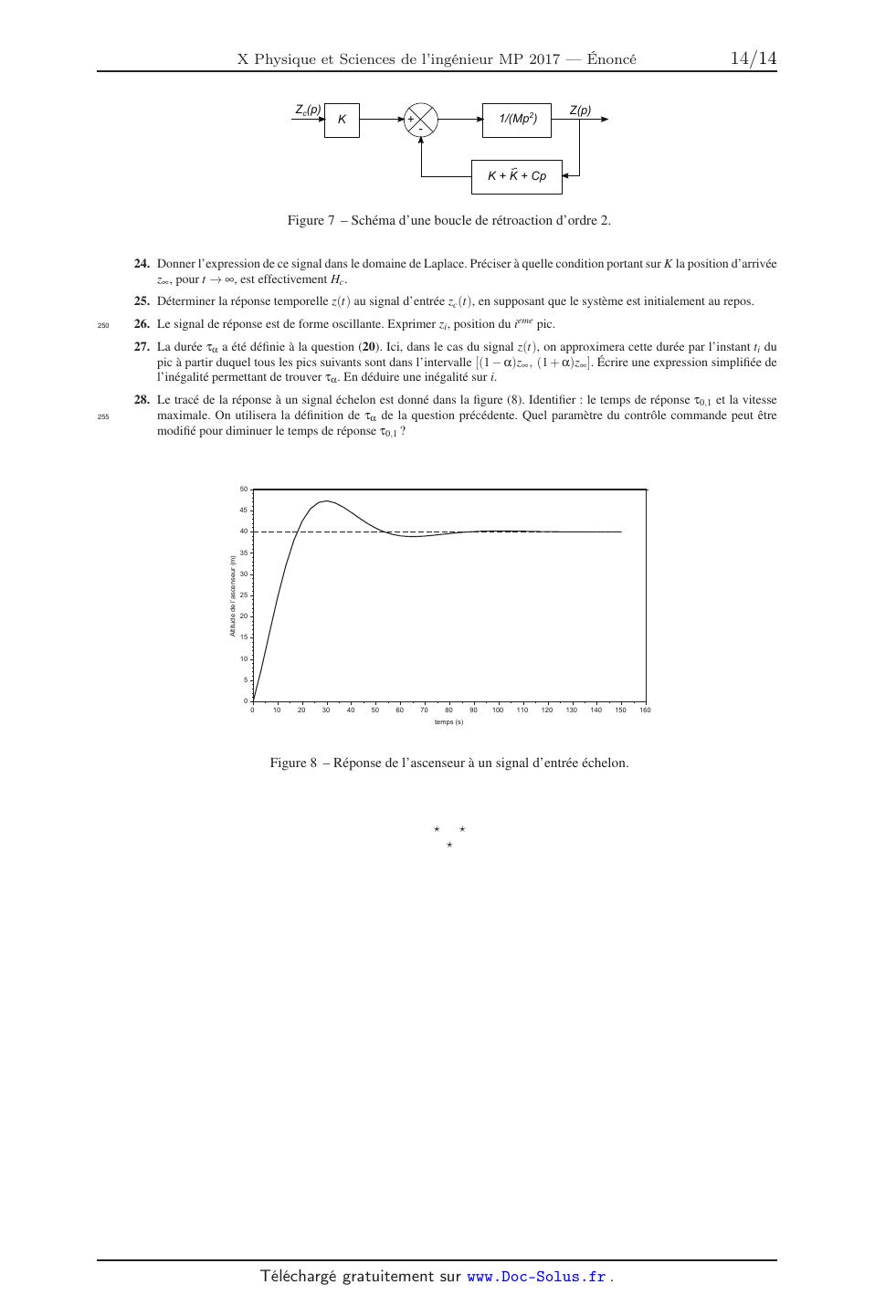
en oeuvre d'un transducteur électroacoustique. La seconde est dédiée aux
sciences de l'ingénieur et s'intéresse au comportement
mécanique de tours de grande hauteur et à la commande de leur ascensseur.
Partie Physique
Modélisation et applications d'un transducteur électroacoustique
10
Nous nous proposons d'étudier le principe et la mise en oeuvre d'un
transducteur électroacoustique émetteurrécepteur. Une
première partie est consacrée à sa modélisation et sa caractérisation. Une
seconde partie s'intéresse à son utilisation dans le cadre
de la mesure d'une vitesse d'écoulement puis dans celui de la localisation
d'une cible. Ces deux parties peuvent être abordées
séparément.
Notations et données.
Permittivité diélectrique du vide : 0
Masse volumique de l'air :
a
Vitesse du son dans l'air :
c
Masse volumique du Mylar :
Épaisseur d'une feuille de Mylar : e
15
25
30
8,85 × 10-12 F · m-1
1, 2 kg · m-3
340 m · s-1
1,4 × 103 kg · m-3
10 µm
(1)
0 S
Capacité d'un condensateur plan, à air, de surface S et de distance
inter-armature d : C =
(dans la limite d S).
d
En vue des applications numériques, la figure (1) représente les fonctions
Sinus et Cosinus.
I
20
=
=
=
=
Étude du transducteur électroacoustique.
Ce transducteur revêt l'apparence d'un condensateur plan dont l'une des
armatures est rigide, l'autre étant une membrane
(ou film) déformable élastiquement. En fonctionnement en émetteur, cette
déformation est causée par la différence de potentiel
appliquée entre les armatures. En fonctionnement en récepteur elle est causée
par l'onde acoustique interceptée par la membrane.
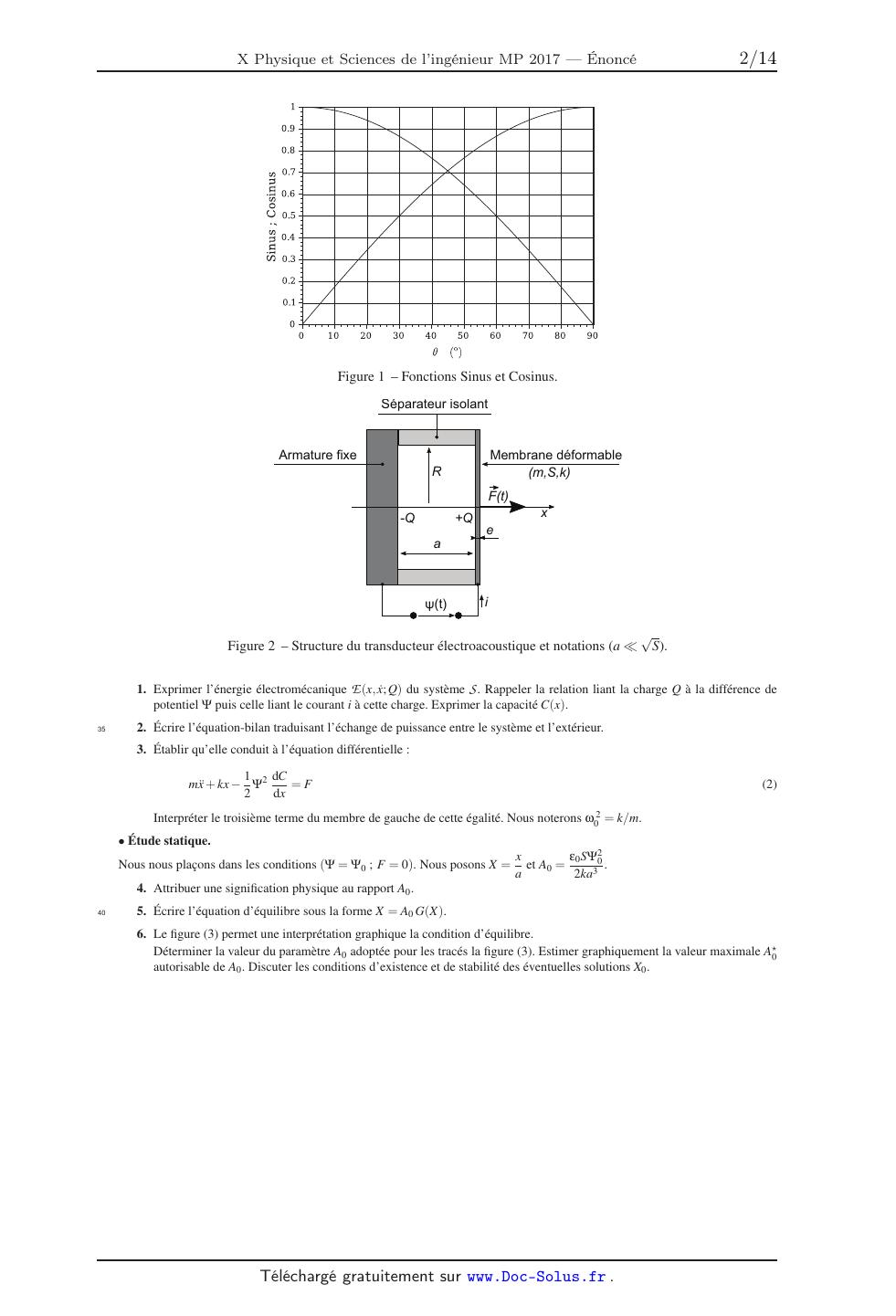
La figure (2) représente sa structure et définit différentes grandeurs
géométriques, mécaniques et électriques de l'étude.
La membrane est une feuille de polyester métallisée, commercialisée sous la
dénomination de "Mylar", tendue sur un cadre
(formé par le séparateur isolant). En fonctionnement en émetteur, tout comme en
récepteur, le condensateur est polarisé sous une
différence de potentiel continue 0 . En mode émission, un générateur de signal
superpose une composante variable (t) à 0 .
En mode réception, ce sont les variations de (t) autour de 0 , induites par la
déformation de la membrane, qui sont détectées à
l'aide d'une carte d'acquisition, d'un analyseur de signal ou d'un
oscilloscope, selon les besoins.
Nous notons S la surface de la membrane (qui peut être un disque ou un carré)
et e son épaisseur. Le comportement mécanique
de cette membrane est, a priori, considéré comme équivalent à celui d'une
surface (S) plane et rigide, de masse m, soumise à
une force de rappel linéaire élastique -kx~ux (x = 0 pour = 0 et F = 0). C(x)
représente la capacité du condensateur plan
ainsi formé, pour une distance entre ses armatures égale à a + x(t). La force
~F = F(t)~ux représente l'action mécanique de l'onde
sur la membrane (en émission comme en réception). Le système S que nous
considérons est formé du condensateur. Il est en
interaction avec les systèmes extérieurs électrique () et mécanique (F).
Page 1/14
Figure 1 Fonctions Sinus et Cosinus.
Séparateur isolant
Armature fixe
Membrane déformable
(m,S,k)
R
F(t)
+Q
-Q
x
e
a
!(t)
i
Figure 2 Structure du transducteur électroacoustique et notations (a
S).
1. Exprimer l'énergie électromécanique E (x, x; Q) du système S . Rappeler la
relation liant la charge Q à la différence de
potentiel puis celle liant le courant i à cette charge. Exprimer la capacité
C(x).
35
2. Écrire l'équation-bilan traduisant l'échange de puissance entre le système
et l'extérieur.
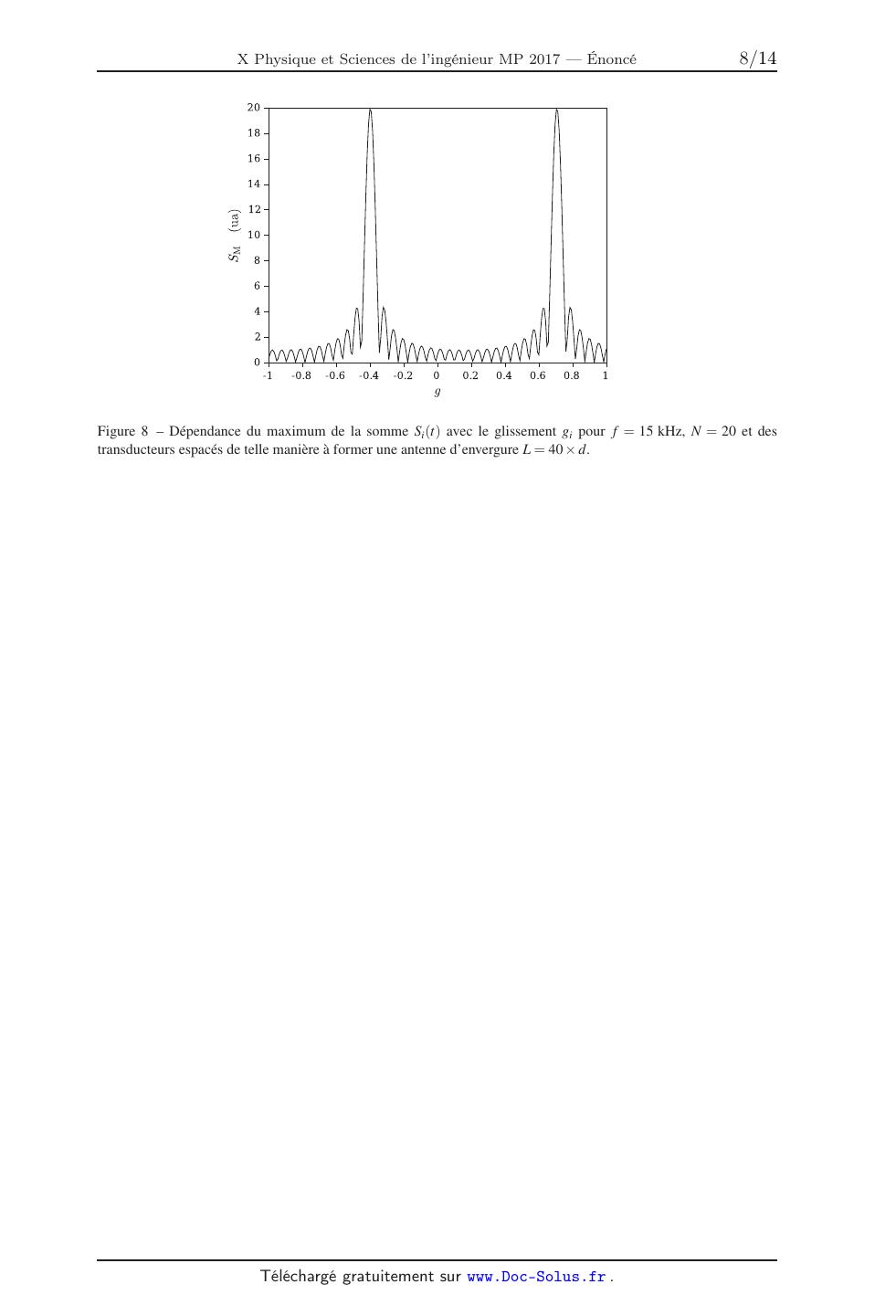
3. Établir qu'elle conduit à l'équation différentielle :
1
dC
=F
mx + kx - 2
2
dx
(2)
Interpréter le troisième terme du membre de gauche de cette égalité. Nous
noterons 02 = k/m.
· Étude statique.
Nous nous plaçons dans les conditions ( = 0 ; F = 0). Nous posons X =
0 S20
x
.
et A0 =
a
2ka3
4. Attribuer une signification physique au rapport A0 .
40
5. Écrire l'équation d'équilibre sous la forme X = A0 G(X).
6. Le figure (3) permet une interprétation graphique la condition d'équilibre.
Déterminer la valeur du paramètre A0 adoptée pour les tracés la figure (3).
Estimer graphiquement la valeur maximale A0
autorisable de A0 . Discuter les conditions d'existence et de stabilité des
éventuelles solutions X0 .
Page 2/14
Figure 3 Traduction graphique de la condition d'équilibre X = A0 G(X).
· Étude dynamique.
Les grandeurs d'équilibre, correspondant aux conditions statiques ( = 0 ; F =
0), seront affectées de l'indice "0". Pour
conduire l'étude dynamique nous posons alors :
(
(t) = 0 + (t) avec | (t) | | 0 |
(3)
x(t) = x0 + u(t) ; X(t) = x(t)/a = x0 /a + u(t)/a = X0 +U(t) avec | U(t) | |
X0 |
7. Établir que l'équation différentielle décrivant le comportement dynamique du
transducteur s'écrit, au premier ordre :
U + 02 (1 - ) U =
45
0 S20
F
- B où = 3
ma
ka (1 + X0 )3
et
B=
0 S0
3
ma (1 + X0 )2
(4)
8. En revenant sur l'établissement de l'équation (4), expliquer pourquoi la
condition de linéarité entréesortie du transducteur
rend nécessaire l'application d'une tension de polarisation 0 non nulle.
· Étude du fonctionnement en émetteur.
Nous adoptons, pour la différence de potentiel variable imposée par le
générateur de signal et la force subie par la membrane de
la part de l'onde acoustique émise, les expressions :
(
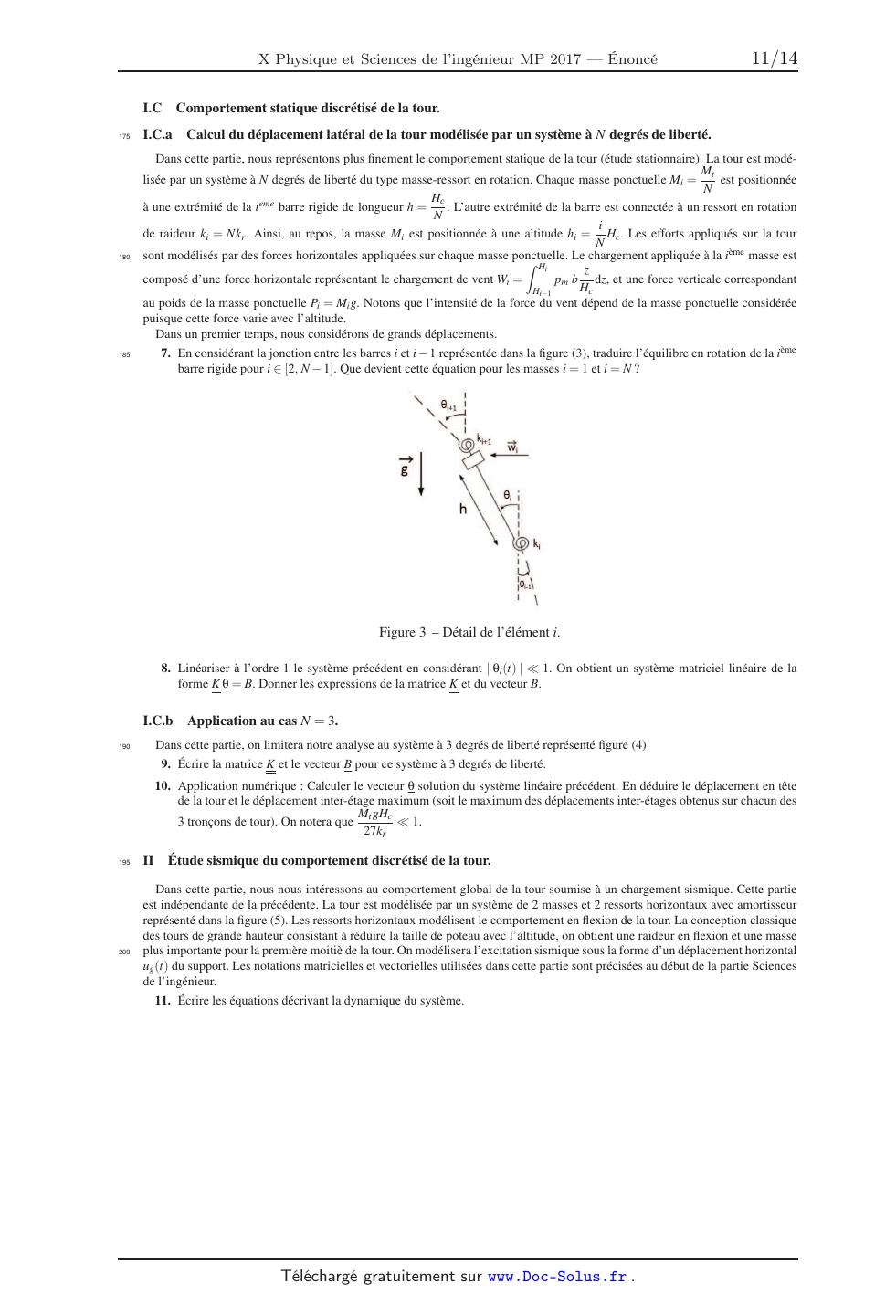
(t) = 0 cos t
(5)
F(t) = -a cS x
9. Écrire l'équation (4) dans ces conditions de fonctionnement en émetteur.
Préciser pourquoi le terme d'amortissement
apparaissant dans cette équation représente l'émission acoustique.
10. Nous notons Z e l'impédance perçue par le générateur électrique imposant le
signal . En négligeant le terme d'émission,
elle s'écrit :
Ze =
1
2 - (1 - )
×
jC(x0 )0
(2 - 1)
où
= /0
(7)
Au vu de cette expression, sur quel domaine cette approximation perd-elle
nécessairement toute légitimité ?
50
11. Esquisser l'allure de la dépendance de Im(Z e ) avec . Interpréter le
comportement du système électromécanique sur
chacun des domaines qui apparaissent.
12. En s'appuyant sur le tracé précédent et sur la constitution du système
électromécanique, proposer un schéma électrique qui
lui serait équivalent, c'est-à-dire présentant le même comportement
fréquentiel. Ce schéma fera intervenir deux condensateurs et une inductance.
Aucun calcul n'est attendu.
Page 3/14
· Étude du fonctionnement en récepteur.
Nous considérons que la membrane est soumise, de la part de l'onde acoustique,
à une force de la forme :
F(t) = F0 cos t
55
(8)
Les variations (t) de la différence de potentiel sont détectées par un appareil
de très grande impédance d'entrée. En choisissant
alors un dispositif de polarisation du transducteur approprié, le récepteur
fonctionne sensiblement à charge fixée (sur son domaine
d'utilisation pratique, dans les hautes fréquences).
13. Écrire l'équation (4), pour la variable , dans ces conditions de
fonctionnement.
14. Préciser le rôle joué ici par la polarisation 0 .
· Épilogue.
15. Commenter la comparaison du membre de gauche des équations différentielles
pour l'émetteur et le récepteur. En particulier, expliquer pourquoi, pour le
récepteur, ce membre n'implique que le seul système mécanique (m, k).
60
16. Nous disposons d'un générateur de tension pour assurer la polarisation 0 .
Proposer un schéma de circuit (très simple
et nécessitant seulement une résistance et un condensateur) permettant de
superposer (t) à 0 en mode émetteur, ou
d'extraire (t) de (t) en mode récepteur.
17. La masse m et la raideur k effectives de la membrane (disque de rayon R et
d'épaisseur e), déduites de considérations
énergétiques, s'expriment :
eR2
m=
(9)
3
k = 2e0
où 0 est la contrainte radiale de prétension de la membrane (exprimée en Pa).
Exprimer 0 . Analyser ce résultat et ses implications en vue d'une utilisation
du transducteur dans le domaine des hautes
fréquences acoustiques.
65
18. Calculer la fréquence caractéristique f0 = 0 /(2) correspondant à un
transducteur de rayon R = 0,5 cm et dont la
membrane est soumise à la pré-contrainte 0 = 107 Pa.
70
II
Quelques applications du transducteur.
Pour le calcul de cosinus ou de sinus d'angles, ou de leur image réciproque, on
utlisera la figure (1) donnée en début d'énoncé.
II.A
Caractérisation de l'émission/réception acoustique.
La surface de la membrane du transducteur est ici carrée, de côté d = 2R (avec
R = 0,5 cm). La fréquence f = /(2) de
fonctionnement du transducteur est choisie égale à 50 kHz.
75
80
19. Dans ces conditions, exprimer l'angle caractéristique 2d d'ouverture (ou de
divergence) du faisceau acoustique émis. On
indiquera, en l'argumentant, la relation utilisée. Justifier que ce résultat
vaut également pour la réception. Déterminer la
valeur de 2d , exprimée en degré.
20. Afin de rendre l'émission plus directive, tout en conservant une fréquence
caractéristique f0 suffisamment élevée (donc en
maintenant R réduit), on réalise un panneau émetteur, ou récepteur, en
assemblant côte à côte une série de transducteurs.
Ces panneaux étant carrés, nous considérerons simplement un assemblage en ligne
de N transducteurs contigus. Déterminer la valeur de N pour réduire l'angle
d'ouverture 2d à 1 o . Nous considérerons alors que le panneau émet une onde
plane, de vecteur d'onde ~k portée par la direction centrale d'émission.
21. Le générateur de signal commandant le panneau possède N voies synchronisées
(c'est-à-dire fonctionnant à la même
fréquence f ) mais dont la phase peut être arbitrairement fixée, pour chacune
d'elles. L'émetteur numéro q (q {1, · · · , N})
est ainsi soumis à la différence de potentiel :
q (t) = 0 cos[t + (q - 1) × g2] où
85
g = Cste ] - 1, +1[
(10)
Nous supposons le panneau en position verticale, l'émetteur le plus haut
portant le numéro q = 1.
Exprimer le glissement g tel que la direction d'émission forme un angle avec
la normale au panneau émetteur (selon
la convention d'orientation trigonométrique, comme celle indiquée figure (4)).
Calculer g pour = 10 o . On choisira la
solution telle que | g | est minimale.
Page 4/14
II.B
90
Vélocimétrie ultrasonore.
Le transducteur électroacoustique étudié est mis en oeuvre dans un dispositif
de mesure de vitesse d'un écoulement d'air. L'air
est, en amont de la zone de mesure, ensemencé 1 de particules assez fines pour
être entraînées par l'écoulement, à sa vitesse.
C'est la manifestation de la diffusion de l'onde acoustique par les particules
qui renseigne sur la vitesse de l'écoulement, au point
de mesure.
On dispose deux panneaux identiques dans un même plan, l'un émettant une onde
plane dans la direction + et de vecteur
d'onde ~k1 , l'autre dans la direction - et de vecteur d'onde ~k2 (k~k1 k =
k~k2 k = /c). Les deux faisceaux se croisent en formant
un domaine de mesure D int (voir figure (4)).
y
Domaine de mesure
k2
(2)
!
x
O
k1
(1)
V
Figure 4 Dispositif d'émission à deux panneaux. Croisement des faisceaux
acoustiques.
95
100
Une particule de diamètre b, convectée par un écoulement d'air, traverse le
domaine D int avec la vitesse ~V = V ~uy (| V | c).
Le rapport b/ est assez faible pour que la particule, soumise à l'onde
acoustique, la ré-émette dans toutes les directions. Nous
considérons cette ré-émission comme sphérique.
22. Caractériser le système d'interférence apparaissant dans ce domaine.
Exprimer son interfrange i (mesuré selon la direction
où il est minimal) en fonction de f , c et . Calculer i pour f = 50 kHz et =
10 o .
23. La particule traversant le domaine d'interférence ré-émet un signal
acoustique dont l'amplitude est modulée (scintillement acoustique). Un
détecteur fixe enregistre le signal s(t) correspondant. Illustrer graphiquement
l'allure de ce signal.
Exprimer, en fonction de c, f , et V , sa période de modulation T mod .
24. Écrivons le signal s(t) détecté sous la forme :
s(t) cos(t) cos(t)
105
0<1 (11) Proposer une procédure de traitement analogique du signal s(t) permettant d'accéder à , et ainsi à V . 25. Sur un schéma, indiquer où il est préférable de placer le détecteur pour déceler et identifier le signal s dans de bonnes conditions. On précisera les critères choisis. II.C 110 où Localisation acoustique d'une cible. Le transducteur est utilisé ici dans un dispositif de localisation spatiale d'une particule (cible), supposée fixe. Le panneau émetteur/récepteur est constitué de N transducteurs carrés de côté d = 2R = 1 cm disposés selon une ligne, formant une antenne. Nous notons d la distance séparant les centres de deux transducteurs voisins (d d) (voir figure (5)). L'antenne est en position verticale, le transducteur le plus haut portant le numéro q = 1. · Situation angulaire. Nous cherchons d'abord à déterminer la latitude c de la cible. La particule est supposée émettre continûmement, dans toutes les directions, un signal acoustique de fréquence f = 2/T = 15 kHz. Elle est située suffisamment loin du panneau pour que l'onde lui parvenant soit sensiblement plane. Le transducteur (ici récepteur) numéro q (q 1, · · · , N) convertit le signal acoustique qu'il reçoit en un signal électrique sq (t). À la réception, les N signaux électriques sq (t) délivrés par chacun des récepteurs sont enregistrés simultanément, pendant la durée R = 10 × T . On effectue ensuite les G sommes : N Si (t) = q=1 sq (t + q,i ) où q,i = (q - 1) d gi c ; gi ] - 1, +1[ ; i {1, · · · , G}. 1. Un dispositif d'injection permet de disperser des particules au sein de l'écoulement, de façon contrôlée. Page 5/14 (12) d q=1 d' ! L x q=N Figure 5 Antenne formée de N transducteurs en ligne, d'envergure L = (N - 1)d + d. 115 Le retard q,i introduit sur chaque signal dépend d'un terme de glissement gi que l'on fait balayer une plage de G valeurs discrètes. Il dépend également de la distance (q - 1)d au premier transducteur. La figure (6) représente la dépendance du maximum SM (i) de la somme Si (t) avec le glissement gi . Figure 6 Dépendance du maximum de la somme Si (t) avec le glissement gi pour f = 15 kHz, N = 40 et des transducteurs contigus (L = 40 × d). 26. De la figure (6), déduire la valeur de l'amplitude ae des signaux électriques sq (en unité arbitraire ua). 27. Indiquer dans quelle condition générale le maximum SM (i) est atteint. Établir alors la relation que doit vérifier gi . 120 28. Déduire alors de la figure (6) la valeur de c . 29. Pour la même situation de la cible, la figure (7) correspond au cas où le nombre de transducteurs est réduit à N = 20 mais en demeurant contigus (L = 20 × d). Argumenter la comparaison des résultats présentés sur les figures (6) et (7). 125 30. Pour la même situation de la cible, la figure (8) représente la dépendance du maximum de la somme Si (t) avec le glissement gi pour N = 20, mais en maintenant l'envergure d'antenne à L = 40 × d. Interpréter l'apparition d'un second pic. Page 6/14 Figure 7 Dépendance du maximum de la somme Si (t) avec le glissement gi pour f = 15 kHz, N = 20 et des transducteurs contigus (L = 20 × d). 31. Pour une incertitude sur l'estimation de gi fixée à ±g, déterminer l'incertitude ±c correspondante sur l'estimation de l'angle c . Préciser la valeur de l'angle pour lequel l'incertitude est minimale. · Éloignement. La cible (supposée ici ne plus émettre) étant maintenant localisée angulairement, il reste à déterminer sa distance Dc au panneau. Ce dernier émet d'abord un train d'onde de fréquence f = 2/T et d'une durée e = 10 × T . Il passe ensuite aussitôt en mode réception, pendant une durée acq (acq e ), afin de détecter le signal d'écho (nous supposons que les conditions sont telles que la source ré-émet dans toutes les directions). Émission et réception s'effectuent dans la direction c . Nous notons e1 (t) le signal électrique commandant le premier transducteur et r1 (t) le signal électrique qu'il délivre, en réception. Ces signaux sont simultanément enregistrés. On définit ensuite la fonction F, de la variable , par l'intégrale : F() = ^ 0 e +acq e1 (t - )r1 (t) dt avec e1 (t) = 0 pour t [-acq , 0] S (13) ( [0, acq ]) [e , e + acq ] et r1 (t) = 0 pour t [0, e ]. 32. Représenter les signaux e1 (t) et r1 (t) pour une certaine distance de cible, en les considérant de même amplitude. 130 33. En déduire l'aspect graphique de la fonction F. Indiquer comment on détermine alors la distance Dc de la cible au panneau. 34. Indiquer comment il serait possible de distinguer, à la réception, le signal émis par la cible de celui qu'elle réfléchit lors de la séquence de mesure de sa distance. Page 7/14 Figure 8 Dépendance du maximum de la somme Si (t) avec le glissement gi pour f = 15 kHz, N = 20 et des transducteurs espacés de telle manière à former une antenne d'envergure L = 40 × d. Page 8/14 Partie Sciences de l'Ingénieur Étude d'une tour de très grande hauteur 135 140 Dans cette seconde partie, nous nous proposons d'étudier différents aspects des tours de très grande hauteur. Ces tours sont définies dans le cadre de la réglementation actuelle comme étant des établissements dont la hauteur entre le rez-de-chaussée et le dernier étage accessible est supérieure à 200 mètres. Nous centrerons notre étude sur leur comportement statique sous les chargements de vent. Nous étudierons également leur comportement sismique. Enfin, nous nous intéresserons à la commande et au contrôle des ascenseurs en service dans ces tours exceptionnelles. Notations et données. Hauteur de la tour : Nombre d'étages de la tour : Pression du vent au sommet de la tour : Largeur du côté de la tour exposé au vent : Masse totale de la tour : Accélération de la pesanteur : Pourcentage d'amortissement critique : Raideur en rotation équivalente : m11 m12 .. . ... m1N Hc Nf pm b Mt g kr = = = = = = = 250 m 80 9 000 N · m-2 40 m 1,5 × 108 Kg 10 m · s-2 2% 2,5 × 1012 N · m (1) m21 est une matrice carrée de dimension [NxN], · M= . .. mN1 m2N . . . mNN U1 U2 · U = . est un vecteur de dimension N. .. UN I 145 150 155 Étude des déplacements de la tour sous chargements extérieurs. Dans cette partie, nous étudierons les déplacements de la tour sous des chargements extérieurs hautement probables. Ces chargements sont identifiés dans le calcul aux États Limites de Service (ELS) définis dans les Eurocodes (code règlementaire de la construction et du calcul de structures au niveau européen). Parmi les chargements extérieurs étudiés, nous considérerons les chargements liés à l'action du vent sur les façades de la tour ainsi qu'au poids propre de la tour. Nous étudierons l'impact de ces chargements sur le déplacement latéral de la tour. Ce critère est utilisé pour vérifier un certain niveau de confort dans les étages et respecter des règles de sécurité sur la tenue des façades de la tour. Ce deuxième critère est lié à un déplacement horizontal relatif entre deux étages et au déplacement maximal du sommet de la tour. On considérera que le déplacement maximal relatif autorisé entre deux étages consécutifs est um = 1,5 cm. Nous nous intéresserons à l'impact et la précision de différents modèles sur les déplacements observés au sommet de la tour. Cette grandeur est l'un des critères d'évaluation de la tenue de la tour aux ELS. Pour cela, nous étudierons différents niveaux de discrétisation de la structures : système à 1 degré de liberté (une masse et un ressort), puis à N degrés de liberté (N masses et N ressorts), ainsi que différents niveaux de précision dans les chargements appliqués : étude en petits déplacements sans changement de géométrie ou étude du type P- (les efforts verticaux créent un moment de rotation complémentaire du fait de l'inclinaison de la tour). I.A Première approche de dimensionnement : calcul du déplacement latéral de la Tour modélisée par un système à 1 degré de liberté. En première approche, nous modélisons la tour par un système à 1 degré de liberté du type masse-ressort en rotation. La masse ponctuelle Mt est positionnée à une extrémité d'une barre rigide de longueur Hc . L'autre extrémité de la barre est connectée à un ^ Hc z ressort en rotation de raideur kr . Les efforts appliqués sur la tour sont modélisés par une force horizontale W = pm b dz H c 0 représentant le chargement dû au vent et une force verticale correspondant au poids de la tour P = Mt g. La variable z représente l'altitude d'un point, sur un axe vertical ascendant. On oriente les angles et les moments selon le sens trigonométrique. En se Page 9/14 reportant à la figure (1), la relation entre le moment extérieur Mres appliqué à un ressort avec amortisseur en rotation et l'angle formé entre ses deux extrémités, par rapport à leur situation d'équilibre, s'écrit : (2) Mres = -kr - cr Notons que kr s'exprime en N · m et cr en N · m · s. Figure 1 Un moment extérieur est appliqué créant un angle entre les deux brins extrêmes d'un ressort en rotation, à partir d'une position de repos à = 0. 160 La figure (2) représente le modèle à un degré de liberté de la tour. Figure 2 Modéle à 1 degré de liberté. 1. Établir l'équation d'écrivant la dynamique du système. On appellera A cette équation. Mext . I et I et préciser leur signification. On note B cette équation linéarisée. 2. En considèrant des angles petits, montrer que l'équation A peut s'écrire sous la forme + 20 + (20 - 2g ) = Identifier chacun des paramètres 0 , g , , Mext 3. Déterminer l'angle d'équilibre linéarisé 0 de la tour. 165 4. On suppose qu'à l'instant t = 0, le système est au repos. Déterminer la réponse du système à la charge de vent W . Déterminer l'angle maximal 1 . Comment cet angle évolue-t-il lorsque l'amortissement de la tour croît ? I.B Étude statique non linéaire du comportement de la tour. Dans cette partie on se place en régime stationnaire pour des angles pouvant être grands. 170 5. Réécrire l'équation A sous ces conditions. Illustrer graphiquement la détermination de l'angle d'équilibre. Analyser ce résultat. 6. Déterminer une solution approchée de l'équation non linéaire en effectuant un développement limité à l'ordre de 1 autour de l'angle 0 solution de l'équation statique linéarisé B. On pose = 0 + avec | | 1. On appelle 2 cette solution. Page 10/14 I.C 175 180 Comportement statique discrétisé de la tour. I.C.a Calcul du déplacement latéral de la tour modélisée par un système à N degrés de liberté. Dans cette partie, nous représentons plus finement le comportement statique de la tour (étude stationnaire). La tour est modéMt lisée par un système à N degrés de liberté du type masse-ressort en rotation. Chaque masse ponctuelle Mi = est positionnée N Hc à une extrémité de la ieme barre rigide de longueur h = . L'autre extrémité de la barre est connectée à un ressort en rotation N i de raideur ki = Nkr . Ainsi, au repos, la masse Mi est positionnée à une altitude hi = Hc . Les efforts appliqués sur la tour N sont modélisés par des forces horizontales appliquées sur chaque masse ponctuelle. Le chargement appliquée à la ième masse est ^ Hi z pm b dz, et une force verticale correspondant composé d'une force horizontale représentant le chargement de vent Wi = H c Hi-1 au poids de la masse ponctuelle Pi = Mi g. Notons que l'intensité de la force du vent dépend de la masse ponctuelle considérée puisque cette force varie avec l'altitude. Dans un premier temps, nous considérons de grands déplacements. 7. En considérant la jonction entre les barres i et i - 1 représentée dans la figure (3), traduire l'équilibre en rotation de la ième barre rigide pour i [2, N - 1]. Que devient cette équation pour les masses i = 1 et i = N ? 185 Figure 3 Détail de l'élément i. 8. Linéariser à l'ordre 1 le système précédent en considérant | i (t) | 1. On obtient un système matriciel linéaire de la forme K = B. Donner les expressions de la matrice K et du vecteur B. I.C.b Application au cas N = 3. Dans cette partie, on limitera notre analyse au système à 3 degrés de liberté représenté figure (4). 190 9. Écrire la matrice K et le vecteur B pour ce système à 3 degrés de liberté. 10. Application numérique : Calculer le vecteur solution du système linéaire précédent. En déduire le déplacement en tête de la tour et le déplacement inter-étage maximum (soit le maximum des déplacements inter-étages obtenus sur chacun des Mt gHc 1. 3 tronçons de tour). On notera que 27kr 195 200 II Étude sismique du comportement discrétisé de la tour. Dans cette partie, nous nous intéressons au comportement global de la tour soumise à un chargement sismique. Cette partie est indépendante de la précédente. La tour est modélisée par un système de 2 masses et 2 ressorts horizontaux avec amortisseur représenté dans la figure (5). Les ressorts horizontaux modélisent le comportement en flexion de la tour. La conception classique des tours de grande hauteur consistant à réduire la taille de poteau avec l'altitude, on obtient une raideur en flexion et une masse plus importante pour la première moitiè de la tour. On modélisera l'excitation sismique sous la forme d'un déplacement horizontal ug (t) du support. Les notations matricielles et vectorielles utilisées dans cette partie sont précisées au début de la partie Sciences de l'ingénieur. 11. Écrire les équations décrivant la dynamique du système. Page 11/14 Figure 4 Modèle de la tour à 3 degrés de liberté. Uu2 Uu1 Uug 2k k 2M 2c M c Figure 5 Modélisation simplifiée du comportement sismique de la tour sans isolateur parasismique. 12. Écrire cette équation sous forme matricielle M U(t) + C U(t) + K U(t) = -M Ug (t). Déterminer les valeurs propres et 205 vecteurs propres de la matrice M -1 K. On nommera respectivement 1 et 2 les valeurs propres et 1 et 2 les vecteurs propres en supposant 1 < 2 . On normalisera les vecteurs propres en considérant un déplacement unitaire pour u1 . 13. On pose 1 = 21 et 2 = 22 . Quelle est la dimension de 1 et 2 ? À quoi correspondent physiquement 1 et 1 , ainsi que 2 et 2 ? 14. En se servant de l'orthogonalité des vecteurs propres et en écrivant U(t) = 1 q1 (t) + 2 q2 (t), montrer que l'équation de la dynamique peut s'écrire sous la forme ci-dessous, en identifiant les variables , 1 et 2 : 2 q1 (t) q1 (t) q1 (t) 0 21 1 0 1 u (t) + + = - (32) q2 (t) 0 22 q2 (t) q2 (t) 2 g 0 22 210 215 15. La réponse de la tour à la sollicitation sismique a lieu uniquement suivant le premier mode propre d'oscillation de la tour. U1 (t) = q1 (t) 1 . On a ainsi : U2 (t) Résoudre l'équation différentielle du deuxième ordre en q1 (t) en utilisant un déplacement sismique du type sinusoïdal Ag ug (t) = 2 sin(t) (relation définissant Ag ). La tour est initialement au repos et on néglige la réponse transitoire de la structure. En déduire le déplacement U2 (t) en tête de la tour. 5 16. Calculer l'amplitude maximale U2,max du déplacement U2 (t) en adoptant les valeurs de paramètres : Ag = m · s-2 , 3 = 1,0 rd · s-1 , k = 4,0 × 108 N · m-1 et m = 5,0 × 107 Kg. On remarquera que << 1. Page 12/14 III 220 Étude du contrôlecommande d'un ascenseur. Cette partie est indépendante des autres. Nous y étudions différentes modélisations des ascenseurs de la tour. L'organisation verticale de la tour donne une grande importance au temps de trajet en ascenseur, notamment pour les étages les plus élevés. L'objectif du contrôlecommande est de répondre à un double objectif : assurer la sécurité et le confort des passagers tout en réduisant au maximum le temps de transport (temps d'attente et temps de trajet). Nous nous intéressons au trajet entre le rez-dechaussée et le dernier étage de la tour situé à Hc . Nous supposerons que l'ascenseur est muni d'un contre-poids annulant l'effet de la gravité sur le temps de trajet de la cabine de l'ascenseur. D'une manière générale, f (t) représentera un signal temporel et F(p) son correspondant dans le domaine de Laplace. III.A Étude d'automates simplifiés. 225 · Modélisation par un système du premier ordre. Dans cette première approche, on néglige la masse du système. Le déplacement de la cabine est alors imposé par la vitesse d'enroulement du câble porteur. Le contrôlecommande est modélisé par une boucle de rétroaction proportionnelle du premier ordre. Figure (6), on donne le diagramme de fonctionnement où Zc (p) représente la consigne de position et Z(p) la position de la cabine (dans le domaine de Laplace). Zc(p) G + - 1/p Z(p) G Figure 6 Diagramme simplifié du comportement de la cabine d'ascenseur au premier ordre. 230 Z(p) . Zc (p) On suppose que le signal de consigne est du type échelon : pour t < 0 zc = 0 zc = Hc pour t 0 17. Écrire la fonction de transfert H(p) = (41) 18. Donner l'expression de ce signal dans le domaine de Laplace. Vérifier que la position d'arrivée à t est bien Hc . 19. Déterminer la réponse temporelle z(t) au signal d'entrée zc (t), en supposant que le système est initialement au repos. 235 20. On appelle le temps de réponse à (100 × ) % : soit le temps à partir duquel le signal de réponse reste dans l'intervalle [(1 - )u , (1 + )u ] où u est la limite du signal de réponse pour un temps infini. Exprimer correspondant à ce système du premier ordre. 21. Pour des raisons de sécurité, la vitesse de déplacement maximale de la cabine est limitée à V0 . Ce critère de sécurité est directement implémenté dans le contrôlecommande de l'ascenseur via le coefficient G. Exprimer le temps minimal pour atteindre la position de consigne en fonction de V0 , supposée atteinte pour 0,001 . 22. Calculer 0,001 pour Hc = 250 m et V0 = 5 m · s-1 . On donne ln(10) 2, 3. 240 245 · Boucle de rétroaction proportionnelle du second ordre. Les résultats obtenus dans l'étude d'une boucle de rétroaction du premier ordre ne permet pas de représenter la dynamique du système mécanique, notamment par la présence d'une discontinuité en vitesse à t = 0. On propose donc d'étudier le comportement d'un modèle du second ordre en considérant encore une boucle de rétroaction proportionnelle. Le système global de traction est modélisé par une inertie M, une raideur K et un amortissement C équivalents . La boucle de rétroaction proportionnelle agit sur la position avec un coefficient de proportionnalité K. Le système est représenté, dans le domaine de Laplace, sur la figure (7). Z(p) . 23. Écrire la fonction de transfert de ce système H(p) = Zc (p) On suppose que le signal de consigne est du type échelon : zc = 0 pour t < 0 (50) zc = Hc pour t 0 Page 13/14 Zc(p) K + Z(p) 1/(Mp2) - K + K + Cp Figure 7 Schéma d'une boucle de rétroaction d'ordre 2. 24. Donner l'expression de ce signal dans le domaine de Laplace. Préciser à quelle condition portant sur K la position d'arrivée z , pour t , est effectivement Hc . 25. Déterminer la réponse temporelle z(t) au signal d'entrée zc (t), en supposant que le système est initialement au repos. 250 26. Le signal de réponse est de forme oscillante. Exprimer zi , position du ieme pic. 27. La durée a été définie à la question (20). Ici, dans le cas du signal z(t), on approximera cette durée par l'instant ti du pic à partir duquel tous les pics suivants sont dans l'intervalle [(1 - )z , (1 + )z ]. Écrire une expression simplifiée de l'inégalité permettant de trouver . En déduire une inégalité sur i. 28. Le tracé de la réponse à un signal échelon est donné dans la figure (8). Identifier : le temps de réponse 0,1 et la vitesse maximale. On utilisera la définition de de la question précédente. Quel paramètre du contrôle commande peut être modifié pour diminuer le temps de réponse 0,1 ? 0 50 45 40 Altitude de lascenseur (m) 255 35 30 25 20 15 10 5 0 0 10 20 30 40 50 60 70 80 90 100 110 120 130 140 150 temps (s) Figure 8 Réponse de l'ascenseur à un signal d'entrée échelon. Page 14/14 160