
X Physique et Sciences de l'ingénieur MP 2020
| Thème de l'épreuve | Principe de la microscopie à force atomique.. Principe de la microscopie à force atomique. |
| Principaux outils utilisés | résistance des matériaux, asservissement, mécanique du solide, électronique, optique |
| Mots clefs | flexion, correcteur proportionnel, correcteur proportionnel intégral, énergie mécanique, potentiel de Lennard-Jones, photodiode |
Corrigé
:👈 gratuite pour tous les corrigés si tu crées un compte
👈 l'accès aux indications de tous les corrigés ne coûte que 1 € ⬅ clique ici
👈 gratuite pour tous les corrigés si tu crées un compte
- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
👈 gratuite pour ce corrigé si tu crées un compte
- - - - - - - -
Énoncé complet
(télécharger le PDF)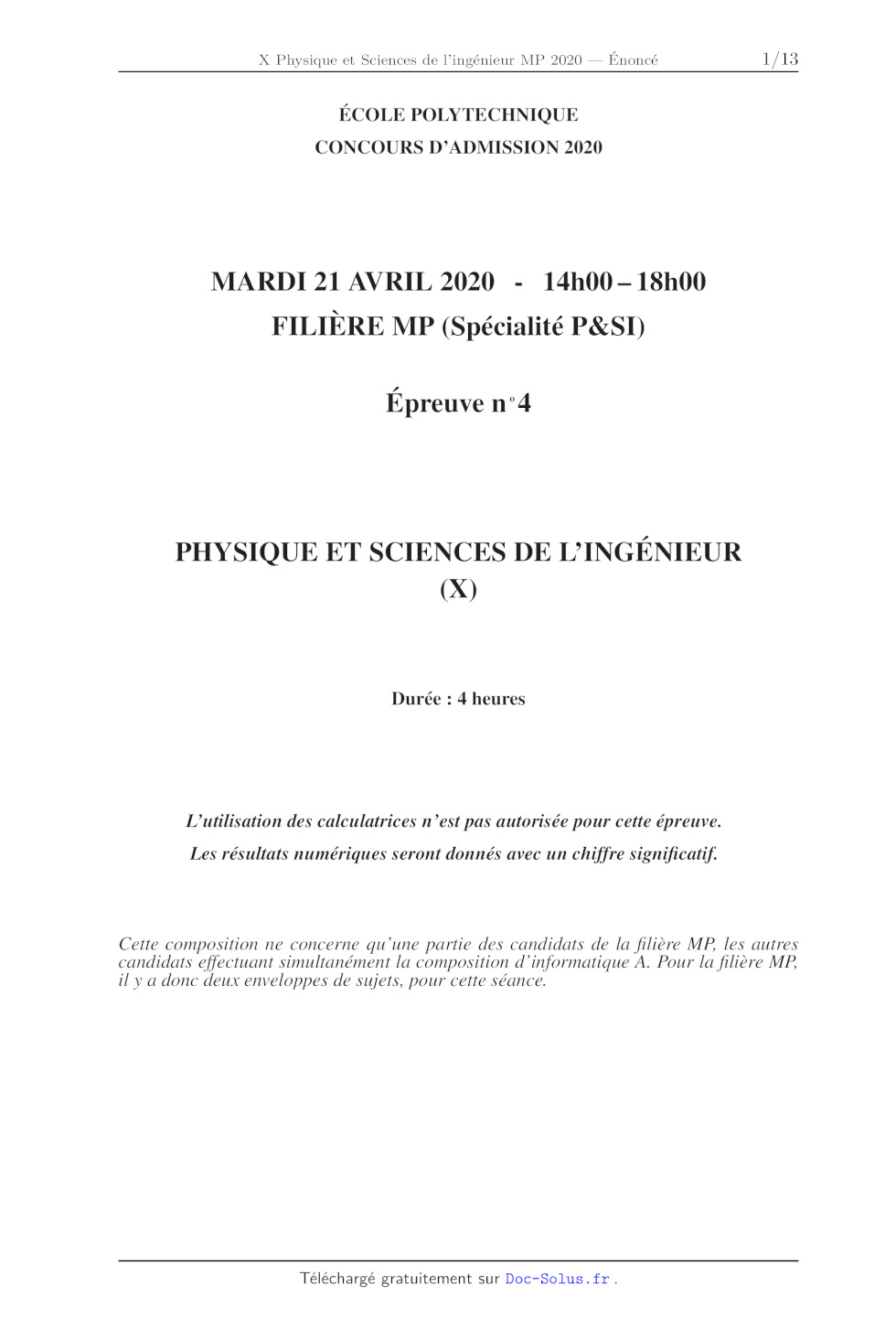






Rapport du jury
(télécharger le PDF)
Énoncé obtenu par reconnaissance optique des caractères
ÉCOLE POLYTECHNIQUE
CONCOURS D'ADMISSION 2020
MARDI 21 AVRIL 2020 - 14h00 -18h00
FILIÈRE MP (Spécialité P&SI)
Épreuve n°4
PHYSIQUE ET SCIENCES DE L'INGÉNIEUR
(X)
Durée : 4 heures
L'utilisation des calculatrices n'est pas autorisée pour cette épreuve.
Les résultats numériques seront donnés avec un chiffre significatif.
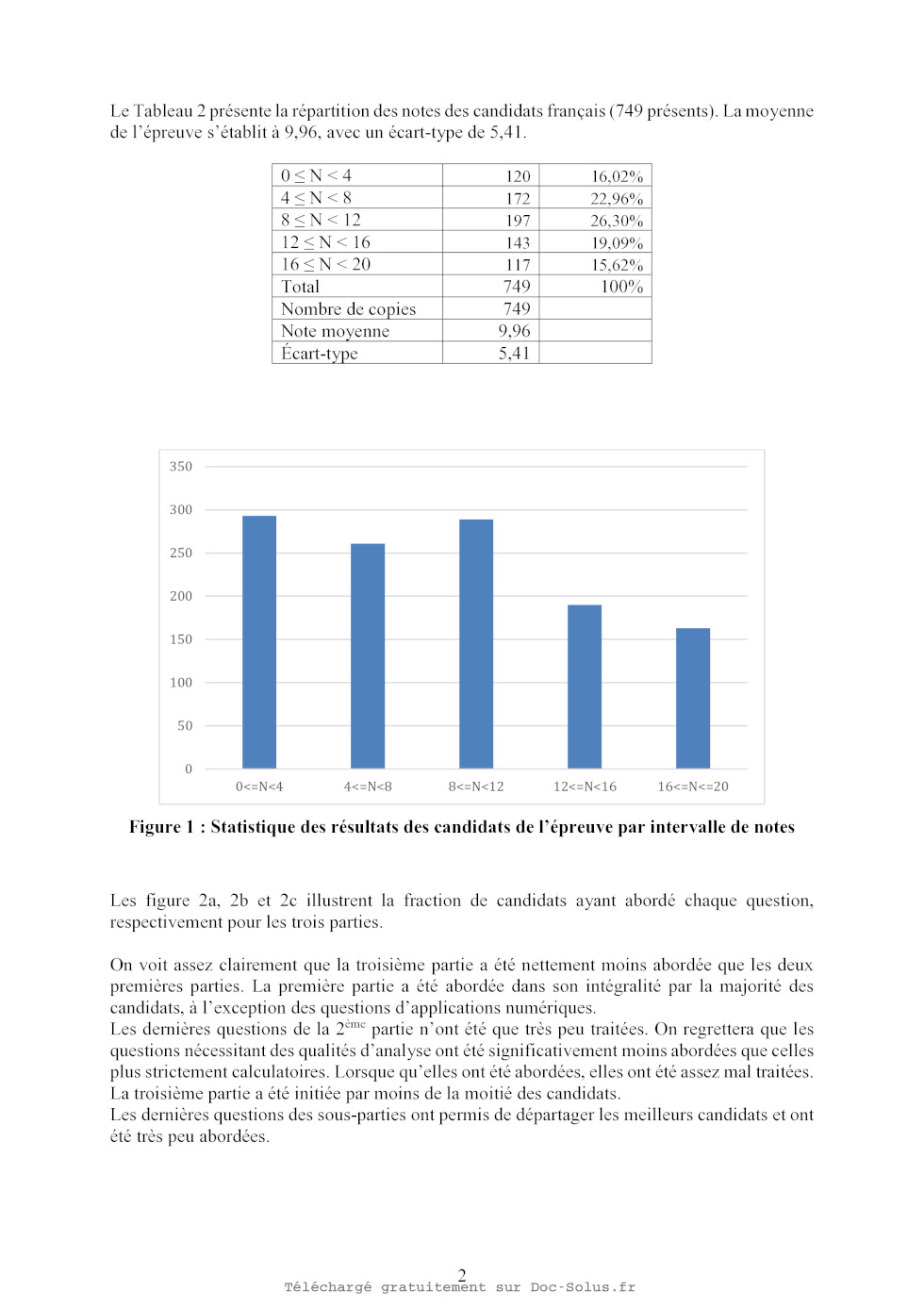
Cette composition ne concerne qu'une partie des candidats de la filière MP les
autres
candidats effectuant simultanément la composition d'informatique À. Pour la
filière MP
il y a donc deux enveloppes de sujets, pour cette séance.
20
25
Principe de la microscopie à force atomique
La microscopie à sonde locale permet de caractériser une surface à l'échelle
nanométrique, voire sub-nanométrique.
Un microscope à force atomique (AFM, selon son abréviation anglaise) effectue
cette caractérisation à travers l'inter-
action qui s'exerce entre la surface (incluant d'éventuels éléments adsorbés,
molécules, film...) et une pointe de
détection de très faible dimension, amenée dans son proche voisinage. Le
déplacement de cette sonde par rapport à la
surface permet de dresser une cartographie de cette interaction.
Nous nous intéresserons d'abord aux propriétés mécaniques de l'élément sensible
d'un AFM. Nous étudierons
ensuite le contexte dans lequel ce microscope est mis en oeuvre afin
d'identifier les exigences techniques qu'il impose.
En dernier lieu, nous analyserons la chaîne de détection, de mesure et de
contrôle. Les parties et sous parties de cette
étude ne sont pas indépendantes.
La structure mécanique d'un AFM est présentée figure (1). L'élément sensible de
ce microscope est une lame flexible
(2) portant, à son extrémité libre (B), une pointe de détection (3). Cette lame
est liée rigidement à son support (1), en
(A), auquel on associe le repère R(A, x, y,z). C'est dans ce dernier que nous
caractériserons, par l'équation y = y(x),
la déformation de la lame. Le repère R(O,X,Y,Z), considéré comme référentiel
galiléen, est lié au bâti (0) (fixe) de
l'AFM. La surface étudiée (4) est située, par rapport à ce repère, par les
coordonnées (X4, Y4). Nous notons L, h et b
les dimensions de la lame selon les axes respectifs (Ax), (Ay) et (Az). Nous
notons enfin f le déplacement, appelé
flèche, de son extrémité (B) et 8 son angle d'inclinaison sur l'axe (Ax).
oeu--.
- --.
A A r \
Y y Pointe de détection (3) _ A
Lame (2) fléchie ir NS Fo -
Support de lame 2 b nr 1e
Li À À
(1) |A OT |f .
| À _
« L . Bo r X
r
YA Lame (2) non fléchie / D À
Bâti. Surface étudiée (4) T4
(0) x
À4
FIGURE 1 -- Structure d'un microscope à force atomique. La lame flexible (2) (L
X h x b), tracée en trait continu, est
représentée fléchie sous l'action de la force d'interaction F que la surface
(4) fait subir à la pointe de détection (3).
Un grossissement de cette pointe apparaît dans un encart.
D Nous nous placerons toujours dans des situations telles que : Vx EUR [0,L],
[y'(x)| & 1 (y = dy/dx).
Li Nous ne prendrons jamais en compte l'effet de la pesanteur.
1 Caractérisation mécanique de la lame.
1.1 Comportement élastique.
ll s'agit d'établir l'équation y = y(x) (appelée "'déformée") décrivant la
forme adoptée par la lame lorsqu'elle est
soumise à la force F = F ü, appliquée à son extrémité B (situation illustrée
figure (1)). Elle permettra notamment de
relier la flèche f = y(L) et l'angle de déflexion 6 à F.
D Nous admettrons qu'un parallélépipède homogène de section S -- L, x L,,
soumis à un effort N; normal à cette
section, subit un accroissement ÔL, de sa longueur L, qui vérifie :
ôL, IN,
x ES co
La grandeur E, constante et positive, est une caractéristique du matériau
constituant le parallélépipède.
-- Page 1/12 --
30
35
40
45
e Nous considérons le tronçon élémentaire |x,x + dx] de lame, délimité par les
sections de centres G(x) et G(x+ dx),
représenté figure (2). Ce tronçon est à l'équilibre mécanique sous l'action,
d'une part de la force --T(x) -- --T(x) ü, et
du moment --A{(x) = --M(x)ü,, en G(x), d'autre part de la force T(x+ dx) =
T(x-+dx) ü, et du moment M(x+ dx) --
M(x+dx)u,,en G(x+ dx). Ces grandeurs traduisent les actions mécaniques que les
parties [0,x] et |x + dx, L] de lame
lui font subir, en réponse à l'application de la force F.
A A
G(x)
V V LIT. 7 à À
Y T(x+dx ---
ue + < SS F « G h1 = de x, Z YA. PU JT Bo <----> (x) |x /.. x+dx
b Y £.GG+dx).
. Exprimer, en fonction de K, Let F, la flèche f et
l'angle 8 (définis sur la figure (1)).
7. Exprimer, en fonction de K et f, l'énergie élastique Ex emmagasinée par la
lame dans un état de déformation
caractérisé par la flèche f.
S
-- Page 2/12 --
x x+dx
(b)
FIGURE 4 -- Tronçon élémentaire |x,x + dx] de lame courbé sous l'effet des
actions mécaniques exercées par les parties
amont et aval.
1.2 Comportement inertiel.
Nous notons m la masse de la lame (celle de la pointe est négligée devant m).
Il s'agit d'exprimer la masse iner-
telle effective mer de la lame qui intervient, en particulier, dans
l'expression de son énergie cinétique ÆE+, en régime
dynamique. Elle est définie par la relation :
FE smaf (=) G)
Pour le mode fondamental de vibration de la lame, nous considérons que la forme
qu'elle adopte peut être confondue
avec celle de sa déformée statique. Elle est alors totalement définie par la
connaissance de la flèche f = f(r), pour
tout temps f. Nous exprimons alors sa déformée dynamique sous la forme :
X
"(= 6 ()F() où =? (
8. Déduire du résultat obtenu à la question (5) l'expression de la fonction 6 =
bu).
9. En sommant les participations de chaque tronçon élémentaire [x,x + dx|,
établir l'expression de l'énergie ciné-
50 tique ÆE. de la lame. En déduire l'expression de sa masse effective mr en
fonction de sa masse m. Sur la base
d'un argument physique, préciser pourquoi Meff < M. 1.3 Estimations numériques. Une lame en nitrure de silicium présente les caractéristiques suivantes ! : L = 200 um ; b = 20 um ; À = 2 um; p = 3000 kg-m *; E--3x10!!N.m *. 55 10. Estimer la valeur de la raideur K,, de la masse effective me et enfin de la fréquence propre (ou, ici, de résonance) Jpo de la lame. 11. La figure (5) représente l'évolution temporelle de la flèche adimensionnalisée f/f(0) en régime libre, depuis la situation initiale (f(0), f(0) -- 0), sa pointe étant soustraite à toute influence de la surface. L'axe des abscisses porte le temps adimensionnalisé @ -- @,0f où @,0 = 2T/fp0: 60 Estimer, à partir de cette évolution, le facteur de qualité Q, de la lame. On indiquera la méthode suivie. 2 Interaction entre la surface et la pointe. Nous supposons que l'interaction entre un atome de la surface (4) et la sonde (3) peut être approximativement décrite par le potentiel U = U(r) d'expression : pv [(" 20)" 6 Les paramètres U* et a (a > 0) représentent respectivement une énergie et une
longueur caractéristiques. La variable
r (r > 0) représente la distance de la surface à la sonde (se reporter à la
figure (1)). Nous supposons que cette sonde
n'est en interaction, majoritairement, qu'avec un seul atome de la surface.
1. Les caractéristiques d'une lame sont adaptées au mode d'utilisation de l'AFM.
-- Page 3/12 --
65
70
75
80
f/ (0)
0 20 40 60 80 100 120 140 160 180
P
FIGURE 5 - Évolution temporelle de la flèche en régime libre (coordonnées
adimensionnalisées), la pointe de détection
étant soustraite à toute interaction avec la surface.
12.
13.
Représenter l'allure graphique du rapport U(r)/U* en fonction de la distance
adimensionnalisée r/a. Indiquer
la nature de l'interaction que représente chacune des composantes de ce
potentiel. Préciser, en le justifiant, le
signe du paramètre U*.
Proposer, sur la base d'une argumentation, un ordre de grandeur des paramètres
a et U".
2.1 Imagerie par mode contact.
L'interaction entre la surface et la sonde est directement caractérisée par la
force qu'exerce la surface sur la sonde.
Ce mode est généralement utilisé dans le domaine répulsif de l'interaction.
Nous rappelons que l'on note K la raideur
de la lame (question (7)).
14
15.
16.
17.
18.
19.
Traduire l'équilibre mécanique de la sonde lorsqu'elle est soumise au potentiel
U(r). On fera apparaître le
paramètre rA et la variable f (flèche).
Établir que cette équation d'équilibre prend la forme :
1 1
R=" et Ra= À (6)
GX(R--Ra)= DR) où DR) = 7 | - "
Le facteur G est une constante positive que l'on exprimera en fonction de K, U*
et a, et dont on donnera une
interprétation physique.
Ilustrer graphiquement la résolution de l'équation (6).
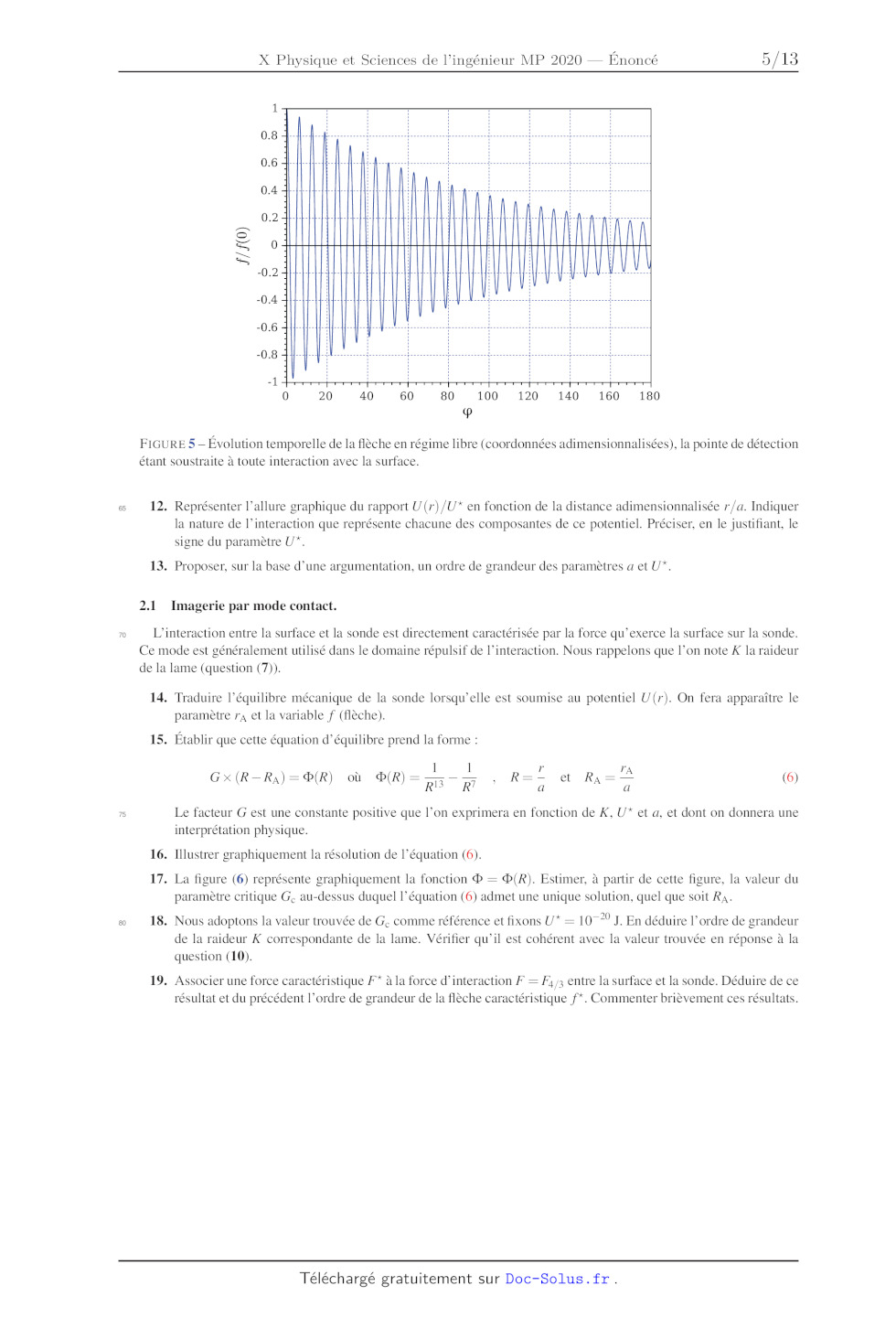
La figure (6) représente graphiquement la fonction D -- (R). Estimer, à partir
de cette figure, la valeur du
paramètre critique G. au-dessus duquel l'équation (6) admet une unique
solution, quel que soit Ra.
Nous adoptons la valeur trouvée de G. comme référence et fixons U* = 107*° J.
En déduire l'ordre de grandeur
de la raideur K correspondante de la lame. Vérifier qu'il est cohérent avec la
valeur trouvée en réponse à la
question (10).
Associer une force caractéristique F" à la force d'interaction F -- F,/3 entre
la surface et la sonde. Déduire de ce
résultat et du précédent l'ordre de grandeur de la flèche caractéristique f*.
Commenter brièvement ces résultats.
-- Page 4/12 --
0.25 -
025
0.8 1 1.2 1.4 1.6 1.8 2 2.2
R=7r/a
FIGURE 6 -- Représentation graphique de la fonction D -- D(R).
e Le champ d'interaction entre la surface et la sonde est exploré en faisant
varier le paramètre RA selon le cycle :
Ra : 22 X 08 / 2,2 (7)
ss 20. Représenter graphiquement l'allure de la dépendance correspondante de
f/a avec R, dans le cas où G=-- 1.
21. Même question que la précédente, mais dans le cas où G -- 1 /4. En déduire
l'allure graphique de la dépendance
de la flèche f avec le paramètre de distance RA. Interpréter ce résultat.
22. Tirer les conclusions pratiques des résultats obtenus en réponse aux
questions (20) et (21).
2.2 Imagerie par mode non-contact.
90 L'interaction entre la surface et la sonde est caractérisée par l'influence
qu'exerce la surface sur la fréquence de
résonance de la lame. Ce mode est utilisé dans le domaine attractif de
l'interaction. Nous rappelons que l'on note
K la raideur de la lame (question (7)) et mes Sa masse effective (masse
intervenant dans l'expression de son énergie
cinétique [équation (3)]).
23. Exprimer l'énergie mécanique totale E de la lame lorsqu'elle oscille et que
la pointe est en interaction avec
95 la surface. On fera apparaître le paramètre rA et la variable f (flèche). On
n'explicitera pas la dépendance du
potentiel U avec la distance, on précisera seulement son argument.
24. Développer l'expression de l'énergie E au voisinage d'un état présupposé
d'équilibre caractérisé par la flèche
Jeg. On ne fera porter ce développement que sur le potentiel U, en le limitant
à l'ordre 2 vis-à-vis de l'écart
(f -- feq). Par ailleurs, on notera simplement Ueq, Us, et UA, le potentiel et
ses dérivées première et deuxième
100 correspondant à l'état d'équilibre (c'est-à-dire que l'on ne les
explicitera pas).
25. En déduire l'équation différentielle du deuxième ordre vérifiée par la
flèche f. On négligera ici toute cause de
dissipation de l'énergie mécanique.
26. Analyser cette équation différentielle.
e La lame est excitée par les oscillations verticales harmoniques de son
support (1), décrites par l'équation horaire
(écrite en représentation complexe) :
Ya = YP+Anexp(ior) (AAER;,oe@=Cste > 0) (8)
-- Page 5/12 --
110
115
D'autre part, nous prenons maintenant en compte l'effet d'amortissement des
oscillations de la lame en introduisant
le facteur de qualité O (Q > 1). Nous supposons que seul l'air ambiant est
responsable de cet effet dissipatif. Ainsi
excitée, la lame oscille autour de sa position moyenne req -- r + fea. Nous
recherchons alors sa réponse en amplitude
sous la forme (en notation complexe) :
r = req + Apexp(iot) (ABEC, [AB| & re) (9)
K + U"
Enfin, nous notons @2 = ----" et O0 --
P Meff P Meff
27. Exprimer la fonction de transfert en amplitude de la lame, définie par le
rapport T = Ag/Aa (T E C). On fera
apparaître le facteur de qualité Q, le paramètre Q,, = @,/@,0 et la variable Q
= ©/@,0.
e Pour ce mode de mesure, l'AFM est équipé d'une lame de raideur telle que K >
IUX, | sur tout le domaine attractif de
l'interaction. Elle est excitée à une pulsation & et une amplitude A1 fixées.
On mesure alors la variation d'amplitude de
sa réponse A(re4) = [Ag|-- |Ago|. Le terme |Ago| désigne l'amplitude de
vibration de la lame en l'absence d'interaction
avec la surface et le terme |43| celle correspondant à la distance r (choisie)
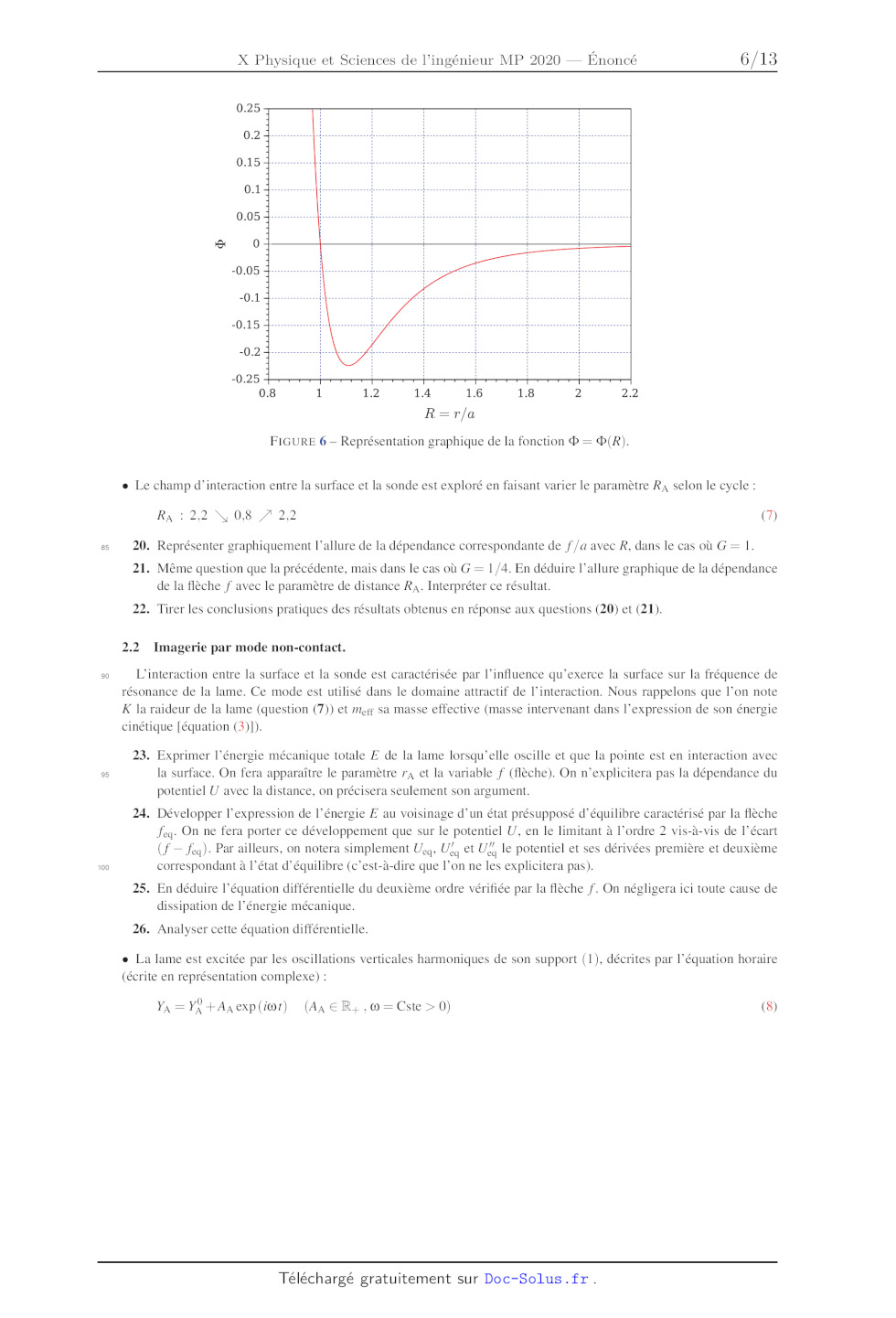
de la surface. La figure (7) représente
graphiquement la dépendance du module |T| avec Q dans le cas où la lame est
sans interaction avec la surface (Q,, -- 1)
et dans celui où elle subit son influence (illustration avec Q,, -- 0,995).
55 -
SO
sd YONNE
op NN
7]
51. NN
304,7 NN
25h he
20 À
LS ------
0.98 0.985 0.99 0.995 1 1.005 TI.OT 1.015 1.02
&w /wp0
FIGURE 7 - Dépendance du module |T| avec Q dans le cas où la lame est sans
interaction avec la surface (Q,, = 1) et
dans celui où elle subit son influence (illustration avec ©, -- 0,995).
28. Estimer, à partir de la figure (7), le facteur de qualité Q, de la lame
dans le cas où elle est sans interaction avec
la surface.
29. Nous définissons la sensibilité intrinsèque s; de ce protocole de mesure
par le rapport :
__@p0 Are)
= Sn. (10)
Aa Op -- @p0
1
Définir le critère conduisant au choix de la (voire, des) pulsation @ la mieux
adaptée à ce protocole. Se souvenir
que K > IUX | et donc que @, reste toujours proche de &,0, comme l'illustre la
figure (7). Estimer alors, à
partir de cette figure, la valeur correspondante de Q. Il ne s'agit pas
d'effectuer des calculs, mais simplement
d'exploiter cette figure.
-- Page 6/12 --
30. Estimer, à partir de la figure (7), la valeur de {si} correspondant à la
valeur choisie de Q.
120 31. Indiquer comment, à partir de la mesure de l'écart A(r), on accède au
gradient (normal) de force existant à la
distance re,4 de la surface.
32. La situation illustrée par la figure (7) correspondrait à une expérience
réalisée à la pression atmosphérique.
Indiquer comment, en pratique, il serait possible d'augmenter {|s;|.
3 De la flèche à sa détection, sa mesure et son contrôle.
125 Nous étudions 1c1 quelques techniques mises en oeuvre dans la chaîne de
détection, de mesure et de contrôle de la
flèche f. Nous caractériserons, en particulier, les éventuelles contraintes ou
limites qu'elles imposent.
3.1 Détection de la flèche.
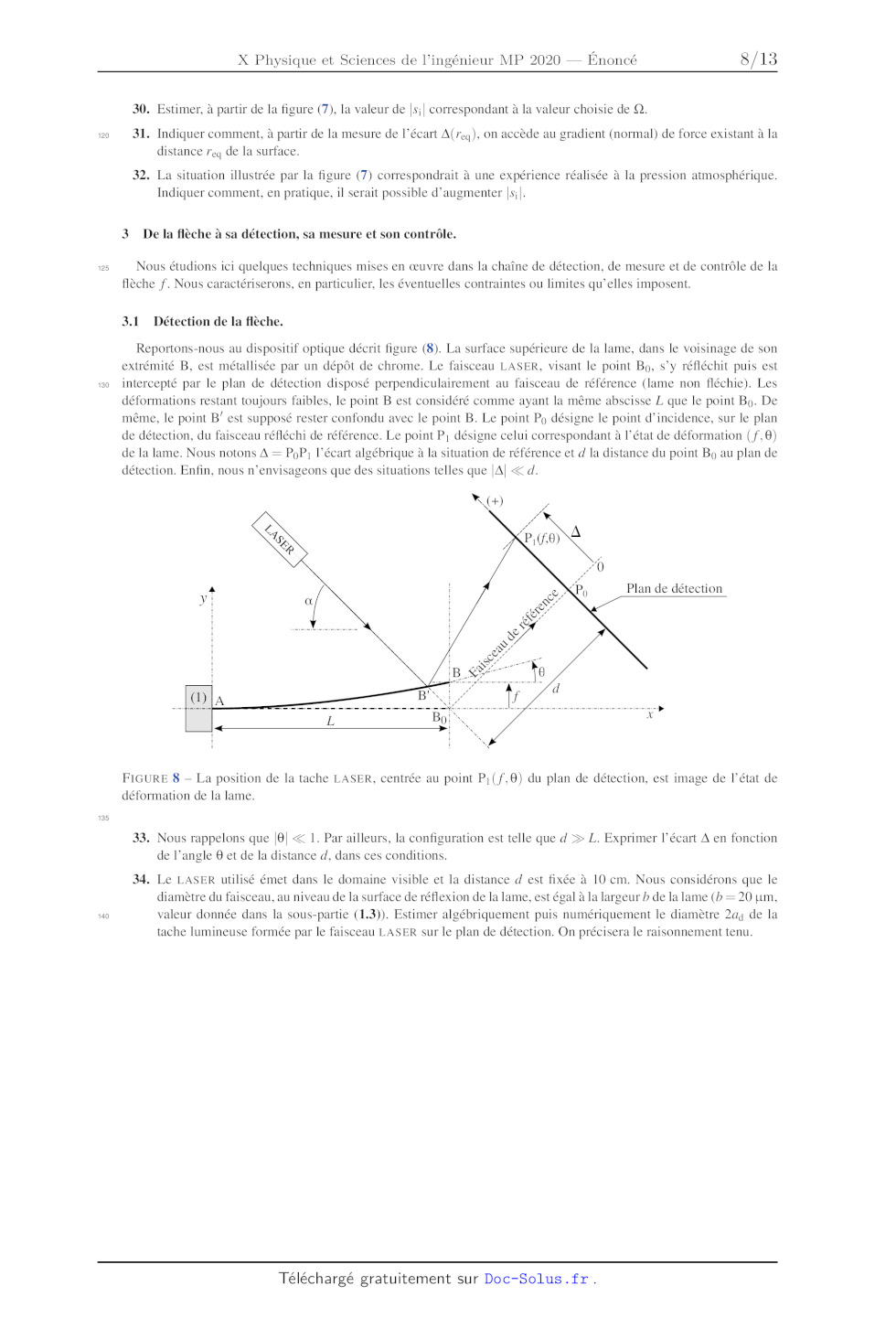
Reportons-nous au dispositif optique décrit figure (8). La surface supérieure
de la lame, dans le voisinage de son
extrémité B, est métallisée par un dépôt de chrome. Le faisceau LASER, visant
le point Bo, s'y réfléchit puis est
130 Intercepté par le plan de détection disposé perpendiculairement au
faisceau de référence (lame non fléchie). Les
déformations restant toujours faibles, le point B est considéré comme ayant la
même abscisse L que le point B5. De
même, le point B' est supposé rester confondu avec le point B. Le point Po
désigne le point d'incidence, sur le plan
de détection, du faisceau réfléchi de référence. Le point P; désigne celui
correspondant à l'état de déformation (f,6)
de la lame. Nous notons À -- P6P; l'écart algébrique à la situation de
référence et d la distance du point Bo au plan de
détection. Enfin, nous n'envisageons que des situations telles que |A! & d.
Plan de détection
(1) |A
V
À
FIGURE 8 -- La position de la tache LASER, centrée au point P,(f,6) du plan de
détection, est image de l'état de
déformation de la lame.
135
33. Nous rappelons que || EUR 1. Par ailleurs, la configuration est telle que d
> L. Exprimer l'écart A en fonction
de l'angle 8 et de la distance d, dans ces conditions.
34. Le LASER utilisé émet dans le domaine visible et la distance d est fixée à
10 cm. Nous considérons que le
diamètre du faisceau, au niveau de la surface de réflexion de la lame, est égal
à la largeur b de la lame (b -- 20 um,
140 valeur donnée dans la sous-partie (1.3)). Estimer algébriquement puis
numériquement le diamètre 2a4 de la
tache lumineuse formée par le faisceau LASER sur le plan de détection. On
précisera le raisonnement tenu.
-- Page 7/12 --
3.2 Localisation par photodétection de la position du point P:.
Reportons-nous à la figure (9). La localisation du point P;, représentant le
centre du faisceau LASER intercepté par
le plan de détection (plan apparaissant figure (8)), est assurée par deux
photodiodes PhD, et PhD; dont les surfaces
145 photosensibles sont contigües. La polarisation de ces photodiodes est telle
que les courants Z; et Z; qui les traversent
sont proportionnels au flux lumineux qu'elles reçoivent. Dans la situation de
référence, le point PQ se situe à la
frontière entre ces deux surfaces et les photodiodes reçoivent alors, chacune,
le même flux lumineux. Lorsque le
point P; s'écarte du point Po, la dissymétrie qui apparaît est directement liée
à l'écart À, lui-même image de l'état de
déformation (f,8) de la lame. Nous notons 6, et 4 les flux lumineux
respectivement reçus par les photodiodes PhD;
1550 et PhD;. Nous considérons que l'intensité lumineuse du faisceau LASER est
uniformément répartie sur sa section.
Nous notons ap le rayon de sa section au niveau de la surface photosensible.
a L=1
PhD, = 2 D PhD,
um ; z »-
PhD, ----; PhD,
Situation de référence Situation P,(f,0)
FIGURE 9 -- Localisation du point P(f,8) à l'aide de deux photodiodes PhD, et
PhD;. Le disque teinté de rayon ap,
de centre P, sur la figure de gauche et de centre P; sur celle de droite,
représente la tache lumineuse formée par le
faisceau LASER sur le plan de détection.
35. Nous définissons le contraste C par le rapport :
c-® 0 (11)
@2 +01
Exprimer ce contraste en fonction de l'écart À et du rayon a, de la tache
lumineuse, en se plaçant dans la limite
A] << GP. 36. Nous identifions a, à aq (question (34)). Analyser la cause qui imite le contraste. 155 37. Notamment à cause de la dérive thermique de la cavité du LASER, l'intensité lumineuse de ce dernier est sus- ceptible de fluctuer (même sur de grandes échelles de temps). Expliquer alors pourquoi le contraste C apparaît mieux adapté à la capture de l'écart À que simplement la différence A0 = > --
O1.
3.3 Étude de la photodétection.
Une photodiode est un dipôle électrocinétique non linéaire dont la
caractéristique courant-tension est paramétrée
'6 par le flux lumineux (dans la gamme fréquentielle appropriée) que sa surface
photosensible absorbe. La figure (10)
symbolise ce composant. Soumis à la différence de potentiel V et absorbant le
flux 6, ce photodétecteur est alors
traversé par le courant 7 -- I(V,6).
P
JEN
FIGURE 10 -- Dipôle électrocinétique (PN) représentant une photodiode soumise à
la différence de potentiel V et
absorbant le flux lumineux 6. Il est alors traversé par le courant 7 -- I(V,6).
-- Page 8/12 --
38. La sensibilité photonique du photodétecteur est définie par le rapport :
La
00 |
Exprimer la sensibilité théorique S4 en considérant que chaque photon du flux
lumineux 0 génère, au sein de
ce composant, une charge élémentaire e participant au courant /.
165 Estimer Sy en adoptant les valeurs arrondies : e = 1,5 x 1071? C,h=5 x 10 *
J:s (constante de PLANCK) et
v = 5 x 10!/* Hz (fréquence de l'émission LASER).
Vérifier que le résultat obtenu est compatible avec la valeur de sensibilité
déduite de la figure (11).
S (A-W°!) (12)
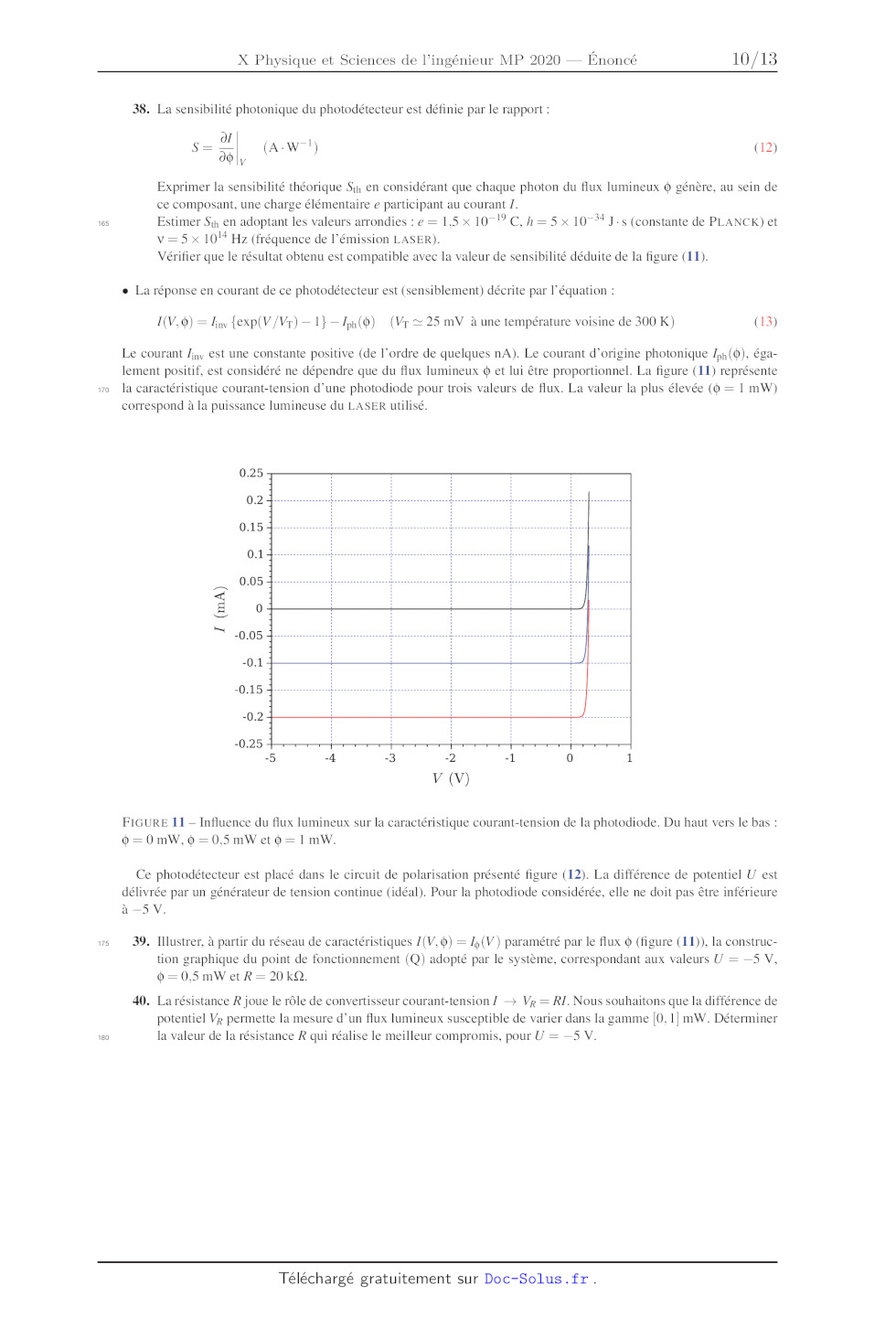
e La réponse en courant de ce photodétecteur est (sensiblement) décrite par
l'équation :
I(V,6) = Znv {exp(V/Vr)--1}--Zn(d) (Vr 25 mV à une température voisine de 300
K) (13)
Le courant /,, est une constante positive (de l'ordre de quelques nA). Le
courant d'origine photonique 1,n(0), éga-
lement positif, est considéré ne dépendre que du flux lumineux 6 et lui être
proportionnel. La figure (11) représente
70 la caractéristique courant-tension d'une photodiode pour trois valeurs de
flux. La valeur la plus élevée (0 = 1 mW)
correspond à la puissance lumineuse du LASER utilisé.
0.25 -
2h |
DS ie
A |
DOS D Le
gd
0054 --
015d Lo -- Lee
I (mA)
0.2 :
025
FIGURE 11 -- Influence du flux lumineux sur la caractéristique courant-tension
de la photodiode. Du haut vers le bas :
6 --=0mW, 6 = 0,5 mW et -- I mW.
Ce photodétecteur est placé dans le circuit de polarisation présenté figure
(12). La différence de potentiel U est
délivrée par un générateur de tension continue (idéal). Pour la photodiode
considérée, elle ne doit pas être inférieure
à --5 V.
75 39. Illustrer, à partir du réseau de caractéristiques Z(V,6) = 1,(V)
paramétré par le flux à (figure (11)), la construc-
tion graphique du point de fonctionnement (Q) adopté par le système,
correspondant aux valeurs U = --5 V,
6 -- 0,5 mW et R = 20Kk0Q.
40. La résistance R joue le rôle de convertisseur courant-tension Z -- VR = RI.
Nous souhaitons que la différence de
potentiel VR permette la mesure d'un flux lumineux susceptible de varier dans
la gamme [0, 1] mW. Déterminer
180 la valeur de la résistance À qui réalise le meilleur compromis, pour U =
--5 V.
-- Page 9/12 --
185
195
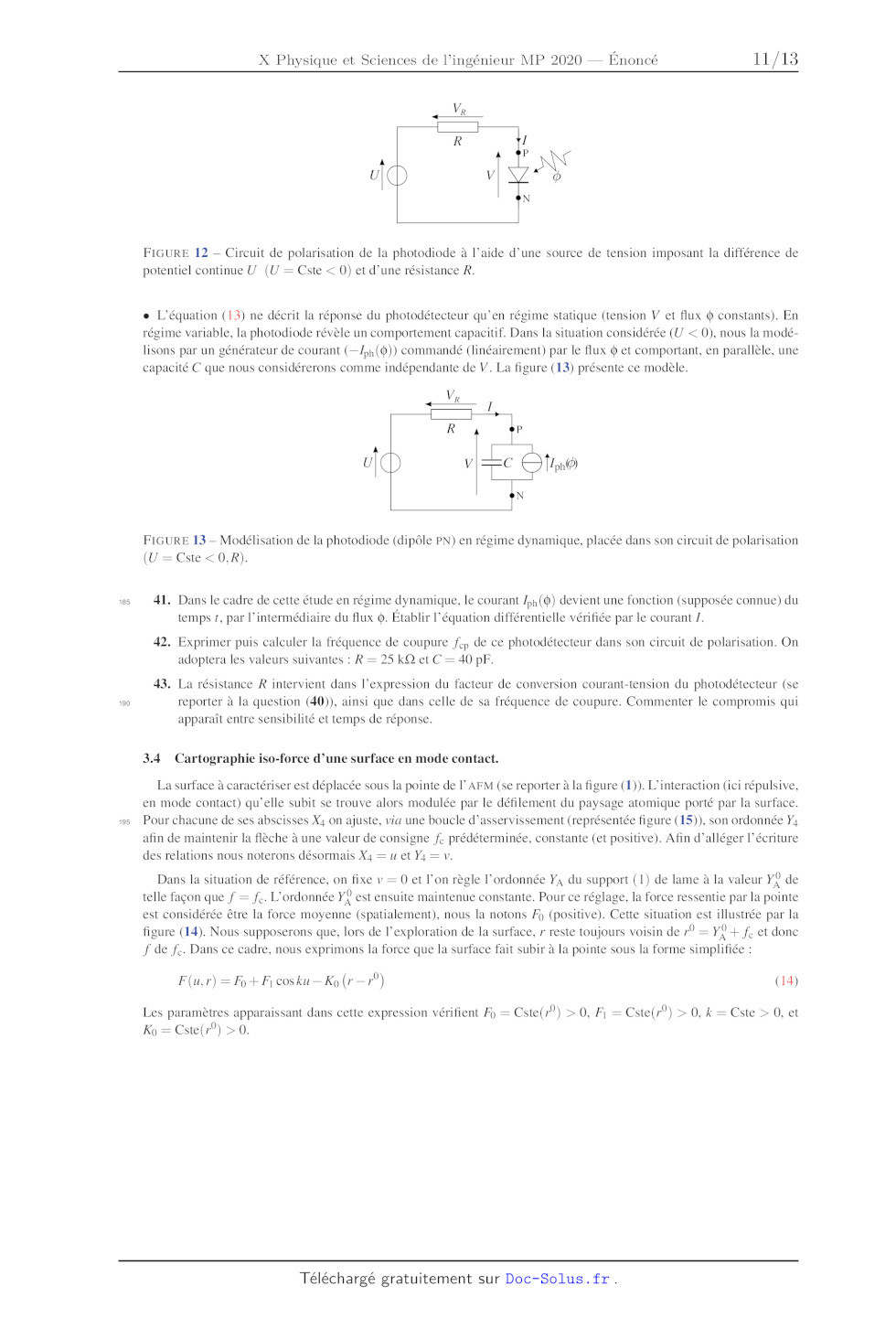
ulC
FIGURE 12 -- Circuit de polarisation de la photodiode à l'aide d'une source de
tension imposant la différence de
potentiel continue U (U = Cste < 0) et d'une résistance R. e L'équation (13) ne décrit la réponse du photodétecteur qu'en régime statique (tension V et flux ® constants). En régime variable, la photodiode révèle un comportement capacitif. Dans la situation considérée (U < 0), nous la modé- lisons par un générateur de courant (--/,(6)) commandé (linéairement) par le flux 6 et comportant, en parallèle, une capacité C que nous considérerons comme indépendante de V. La figure (13) présente ce modèle. D vec Otmo FIGURE 13 - Modélisation de la photodiode (dipôle PN) en régime dynamique, placée dans son circuit de polarisation (U = Cste < 0,R). 41. Dans le cadre de cette étude en régime dynamique, le courant (0) devient une fonction (supposée connue) du temps f, par l'intermédiaire du flux 6. Etablir l'équation différentielle vérifiée par le courant J. 42. Exprimer puis calculer la fréquence de coupure f, de ce photodétecteur dans son circuit de polarisation. On adoptera les valeurs suivantes : R -- 25 KQ et C -- 40 pF. 43. La résistance R intervient dans l'expression du facteur de conversion courant-tension du photodétecteur (se reporter à la question (40)), ainsi que dans celle de sa fréquence de coupure. Commenter le compromis qui apparaît entre sensibilité et temps de réponse. 3.4 Cartographie iso-force d'une surface en mode contact. La surface à caractériser est déplacée sous la pointe de l'AFM (se reporter à la figure (1)). L'interaction (ici répulsive, en mode contact) qu'elle subit se trouve alors modulée par le défilement du paysage atomique porté par la surface. Pour chacune de ses abscisses X4 on ajuste, via une boucle d'asservissement (représentée figure (15)), son ordonnée 4 afin de maintenir la flèche à une valeur de consigne f. prédéterminée, constante (et positive). Afin d'alléger l'écriture des relations nous noterons désormais X4 = u et Y4 = v. Dans la situation de référence, on fixe v -- 0 et l'on règle l'ordonnée YA du support (1) de lame à la valeur Y À de telle façon que f = f.. L'ordonnée Y À est ensuite maintenue constante. Pour ce réglage, la force ressentie par la pointe est considérée être la force moyenne (spatialement), nous la notons F4 (positive). Cette situation est illustrée par la figure (14). Nous supposerons que, lors de l'exploration de la surface, r reste toujours voisin de r° = Y À + f. et donc f de f<. Dans ce cadre, nous exprimons la force que la surface fait subir à la pointe sous la forme simplifiée : F(u,r) = Fo+F cosku -- Ko(r--r°) (14) Les paramètres apparaissant dans cette expression vérifient #, -- Cste(r°) > 0,
F, = Cste(r°) > 0, k = Cste > O, et
Ko = Cste(r°) > 0.
-- Page 10/12 --
A A
Y y A
Fo
B
À À
(1) A J C "
Bo x
r0
YA
Bâti O D À Av=Y4=0 ,
(0) Surface étudiée (4) À
u=X 4
De.
>»
FIGURE 14 -- Cartographie de la surface en mode contact -- Situation de
référence.
20 Li Notations et données spécifiques à cette sous-partie.
e Nous notons p (p EUR C) la variable de LAPLACE.
e La fonction échelon (ou fonction de HEAVISIDE) est définie par la relation :
0 pour f < 0 H(D=4 (15) l pour 1 >0
1
e Cette fonction admet, pour transformée de LAPLACE, la fonction : L(H)= --
(Re(p) > 0).
P
e La transformée de LAPLACE de la dérivée f' d'une fonction f s'écrit : £L(f")
= p£L(f) -- f(0-).
e Théorème de la valeur finale : Si la limite Jim f(t) existe alors Jim ft) --
Jim, PL(f).
205 44, Préciser ce que représente, physiquement, chacun des paramètres F1, k
et Ko.
45. Nous notons Æ (F -- 10° Hz) la fréquence de coupure (haute) de l'ensemble
du dispositif de photodétection
et de traitement du signal. Proposer une estimation numérique (argumentée) de
la vitesse maximale Vy de
translation de la surface sous la pointe de détection.
e Nous notons K la raideur de la lame (question (7)) et mer Sa masse effective
(équation (3)) et introduisons son
20 facteur d'amortissement © (analogue mécanique de la résistance électrique).
L'ordonnée v de la surface, maintenant a
priori non nulle, est pour l'instant considérée comme un paramètre (devant
toutefois rester "petit", dans le cadre que
nous avons fixé). Cette ordonnée est fixée par un élément piézoélectrique
commandé par une différence de potentiel
(l'ordonnée y varie linéairement avec le signal g). La figure (15) présente la
modélisation mécanique, le paramétrage
de ce système ainsi que la structrure générale de la contre-réaction qui
interviendra dans la suite.
46. Établir l'équation différentielle dont est solution la différence £ = f --
f..
Nous l'écrirons sous la forme :
...... O50. O0 oe
E+ PE (oo +m)e=T: cosku+@v où --2 -- et O0 -- (Qo > 1) (16)
Oo Qo Mer Meff
215 Préciser alors l'expression de chacune des grandeurs @? et Li.
47. La contre-réaction visant l'asservissement de la flèche f à la consigne f4
agit par l'intermédiaire de la va-
riable g commandant le positionneur vertical (élément piézoélectrique)
représenté figure (15). Elle est traduite
globalement par la relation :
v=f$(f--f) (B--= Cste) (17)
Préciser d'abord (en le justifiant) quel doit être le signe du facteur B pour
que l'asservissement soit effectif.
Ecrire ensuite l'équation différentielle, décrivant maintenant le système
bouclé, vérifiée par la variable EUR.
-- Page 11/12 --
M Consi
| 2 > Conditionneur EUR -- |.
y Surface
A
D y
O V X
u Positionneur q
>| vertical
Bâti (0)
D
D
Contre-réaction
FIGURE 15 -- Modélisation mécanique du système. La commande du positionneur
vertical (élément piézoélectrique),
représentée par la variable d'entrée g, permet de fixer l'ordonnée v de la
surface. La variable g, fonction de la différence
fe -- f, constitue la contre-réaction, lorsque le système est bouclé.
48.
220
49.
50.
225
51.
235
Nous imaginons que la pointe, lors de son déplacement, rencontre une "marche"
formée par l'abord d'une
couche atomique supplémentaire. Nous modélisons cette situation en remplaçant
le terme cos ku(t) par la fonc-
tion échelon H = H(t). Décrire (qualitativement) la réponse du système bouclé à
cette sollicitation. Exprimer
la limite Ex -- lime et commenter ce résultat.
La contre-réaction est maintenant de la forme :
y -- BR) +0ù f'ar(r (B = Cste ; Q7 = Cste > 0) (18)
Écrire l'équation intégro-différentielle vérifiée par la variable £ (avec, de
nouveau, le terme F1 cos ku de l'équa-
tion (14)).
Nous appliquons au système ainsi bouclé la sollicitation en échelon décrite à
la question (48). Déterminer la
limite Ex -- lime puis commenter ce résultat.
La surface est maintenant déplacée à la vitesse V -- à constante. Nous posons @
= XV. Préciser à quelles condi-
tions, portant Sur @, nous pouvons considérer que le système est sollicité de
façon quasistatique (on raisonnera
1ic1 simplement sur le système non bouclé). Nous nous placerons maintenant
toujours dans le cas d'une sollici-
tation quasistatique, y compris lorsque le système est bouclé.
. Étudier la qualité de respect de la consigne dans le cas où la
contre-réaction est décrite par l'équation (17).
53.
54.
Étudier la qualité de respect de la consigne dans le cas où la contre-réaction
est décrite par l'équation (18).
Préciser pourquoi la contre-réaction décrite par l'équation (18), en
comparaison à celle décrite par l'équation
(17), expose le système à un risque d'instabilité.
-- Page 12/12 --