
X Physique et Sciences de l'ingénieur MP 2024
| Thème de l'épreuve | Rebonds d'une balle sur une surface en mouvement périodique. Le Delthaptic, un dispositif haptique parallèle à six degrés de liberté actifs. |
| Principaux outils utilisés | mécanique du point, fermeture géométrique, cinématique, dynamique, liaisons équivalentes |
| Mots clefs | synchronisation, choc élastique, synchronisation, stabilité |
Corrigé
:👈 gratuite pour tous les corrigés si tu crées un compte
👈 l'accès aux indications de tous les corrigés ne coûte que 1 € ⬅ clique ici
👈 gratuite pour tous les corrigés si tu crées un compte
- - - - - - -
👈 gratuite pour ce corrigé si tu crées un compte
- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
Énoncé complet
(télécharger le PDF)










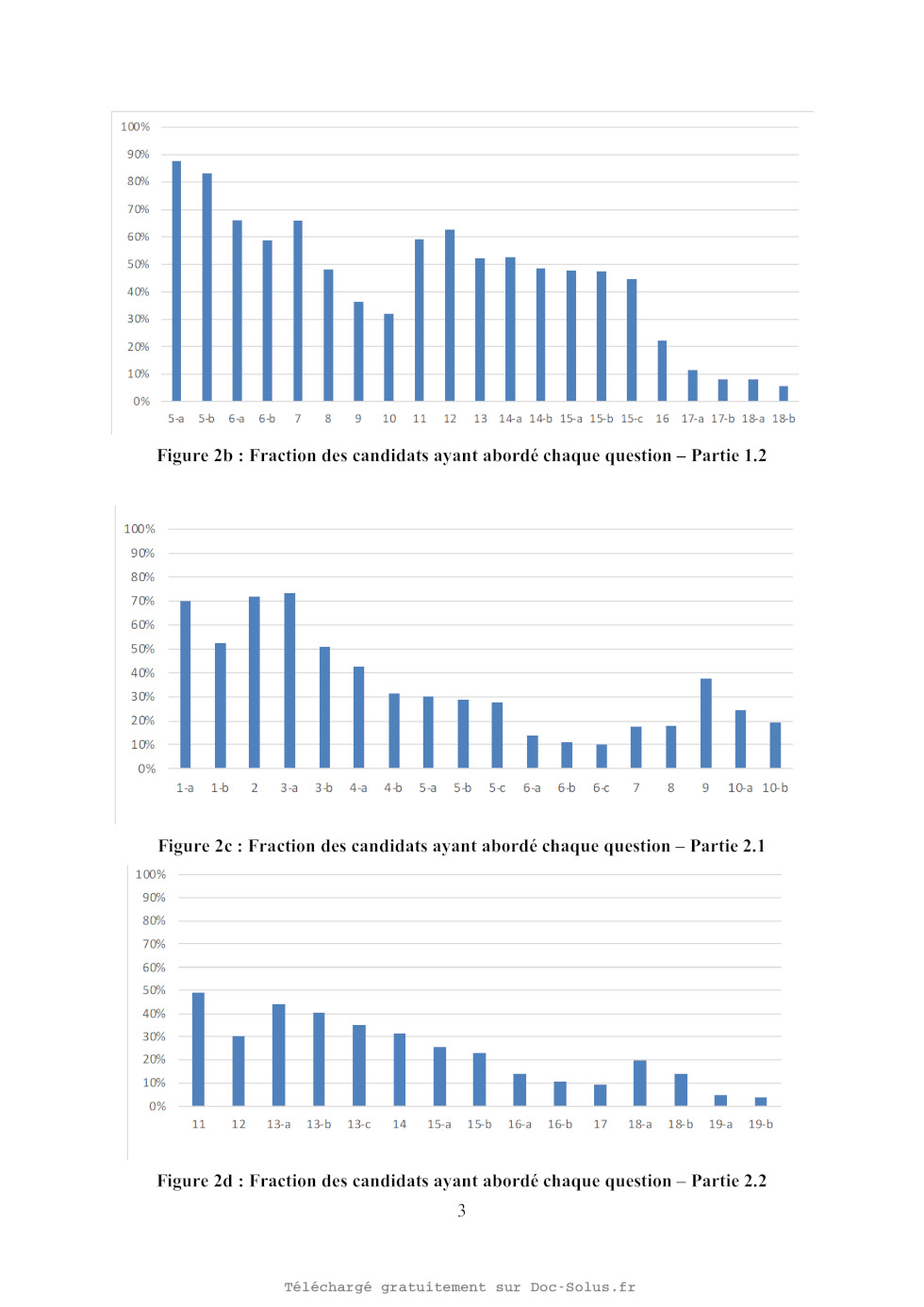
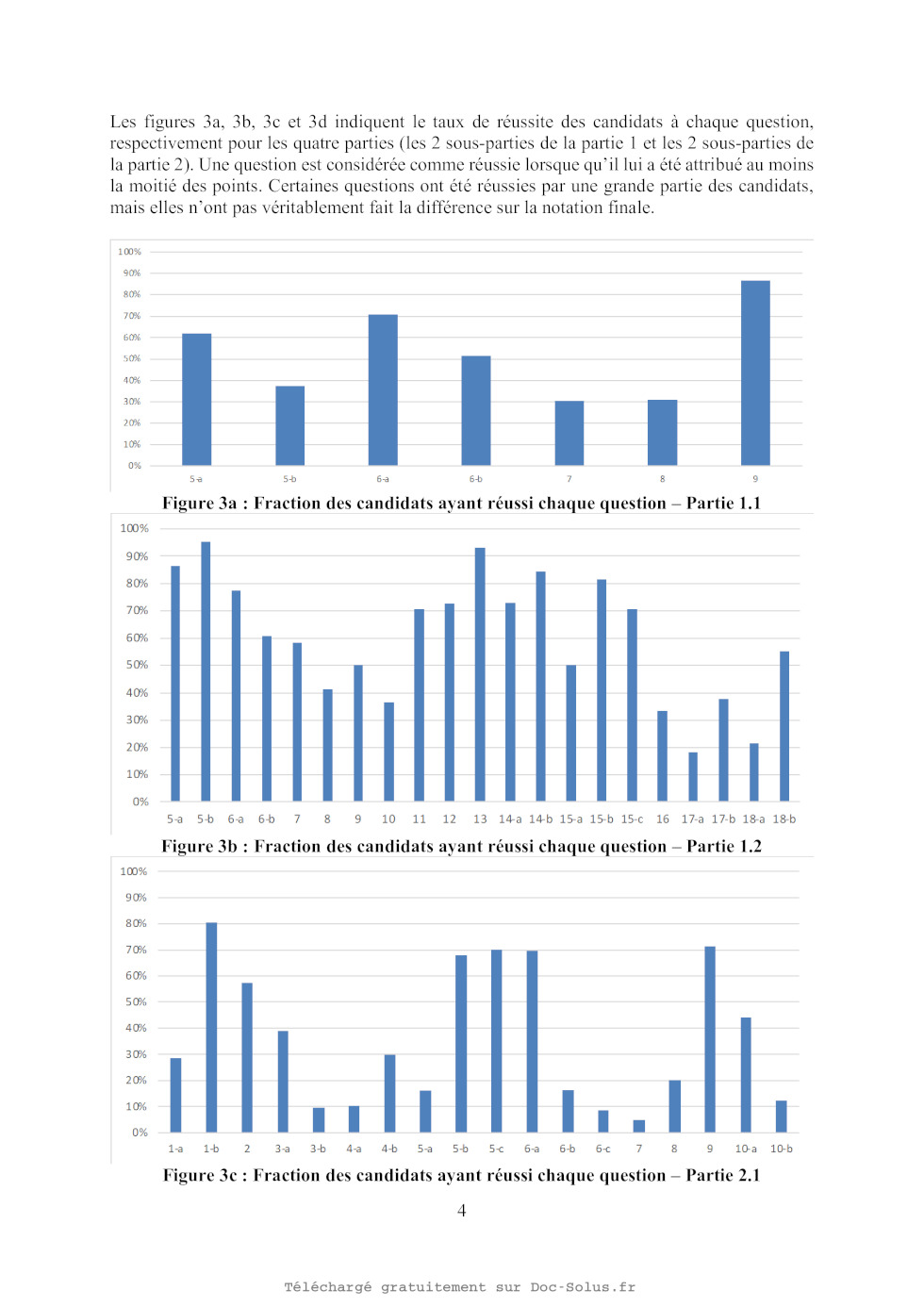
Rapport du jury
(télécharger le PDF)
Énoncé obtenu par reconnaissance optique des caractères
ÉCOLE POLYTECHNIQUE
CONCOURS D'ADMISSION 2024
MARDI 16 AVRIL 2024
14h00 -- 18h00
FILIÈRE MP --- Épreuve n°4
PHYSIQUE ET SCIENCES
DE L'INGÉNIEUR (X)
Durée : 4 heures
L'utilisation de calculatrices n'est pas autorisée pour cette épreuve.
Cette composition ne concerne qu'une partie des candidats de la filière MP, les
autres
candidats effectuant parallèlement la composition d'informatique À.
Pour la filière MP, il y a donc deux enveloppes de sujets, pour cette séance.
10
15
20
25
Cette épreuve comprend deux parties indépendantes. La première porte sur
l'étude des conditions de
synchronisation des rebonds d'une balle sur une surface horizontale oscillant
verticalement, de manière
harmonique. La seconde propose d'étudier un dispositif haptique à six degrés de
liberté actifs, permettant
de piloter des robots à distance et d'interagir avec un environnement virtuel.
--+ Îl est conseillé de ne pas consacrer plus de deux heures par partie.
--+ Les applications numériques seront effectuées avec la précision qu'un
calcul à la main permet aisément, et
sans excéder deux chiffres significatifs. Les ordres de grandeur seront donnés
avec un seul chiffre significatif.
--+ Les réponses aux questions relevant de considérations qualitatives devront
être argumentées.
--+ Les références des questions abordées devront être indiquées de façon
claire.
Partie Physique
Rebonds d'une balle sur une surface en mouvement périodique
Cette étude comprend deux parties, chacune pouvant être abordée de façon
indépendante. La première est
consacrée à la modélisation viscoélastique d'un solide durant un choc. La
seconde s'intéresse aux conditions
de synchronisation des rebonds d'une balle sur une surface plane en mouvement
vertical harmonique.
1 Une modélisation du comportement viscoélastique d'un solide lors d'un choc
contre une
surface rigide.
Le modèle adopté du solide est représenté sur la figure (1). Il comprend un
élément indéformable (M),
auquel est affectée la masse totale m du solide, en liaison avec un pied (P)
par l'intermédiaire d'un élément
élastique et d'un élément amortisseur agissant parallèlement. Ces derniers sont
supposés sans masse et se
comporter linéairement vis-à-vis du déplacement (ou déformation) s. La surface
(S), fixe dans le référentiel
d'étude R(O, x) (supposé galiléen), est supposée indéformable.
Nous notons k (qui a la dimension d'une force sur une longueur) la raideur de
l'élément élastique et À
(qui a la dimension d'une force sur une vitesse) le coefficient d'amortissement
(k > 0 et À > 0). Sur la figure
(1)-(a), le solide n'est pas en contact avec la surface, il se déplace à la
vitesse Vo = Vo x (Vo = Cste > 0)
dans sa direction. La figure (1)-(b) représente la situation lors du choc. La
distance d définit l'origine du
déplacement s du solide (c'est la longueur du solide non déformé). L'action de
la pesanteur n'est pas prise
en compte dans cette modélisation.
(a) -- | (b)
=
Surface rigide fixe (S)
E
Surface rigide fixe (S)
Y
Y
À
À
| | |
LÉ LÉ
O! X O X
FIGURE 1 - Modélisation viscoélastique d'un solide : (a) Solide non déformé en
progression à vitesse constante
VW = Ve, en direction de la surface rigide fixe (S) ; (b) Déformation du solide
durant la phase de son contact
avec la surface (S). Cette déformation est paramétrée par l'abscisse s.
N \/ k t À N < 1 OUS pOsOns Wo = 1/ -- et a -- . Nous supposons que @ | m 2Vkm -- Page 1/16 - 30 35 40 45 . Établir l'expression de la dépendance temporelle s = s(t) du déplacement de l'élément (M) au cours du choc. On indiquera l'intervalle de temps I. sur lequel cette dépendance doit être considérée. On fera intervenir les constantes wo, à et Vo. . Nous notons A -- Ve, la vitesse du solide après la phase de rebond sur la surface rigide. Établir que le coefficient de restitution en vitesse r, défini par le rapport r = --Vi/V5, s'exprime selon la relation suivante : r -- exp (- 7) (1) Commenter cette expression. Expliquer pourquoi r ne dépend pas de la vitesse initiale W. . Il s'agit d'accéder à la valeur du coefficient de restitution en vitesse r caractérisant les rebonds d'une balle de tennis de table sur une surface rigide horizontale et immobile. À cette fin, on effectue un lâché vertical, dans le champ de pesanteur, de la balle depuis une hauteur initiale ho. On détecte les impacts à l'aide d'un microphone. La figure (2) représente la dépendance du temps de vol 7} = ty+1 -- tn, relatif au rebond n (n > 1),
de la balle entre ses impacts n (instant t,) et n + 1 (instant t{,:1) contre la
surface. La hauteur ho
est choisie de telle manière qu'elle n'induise pas de retournement de la
convexité (flambage) de la
surface-enveloppe de la balle, au cours du choc. Par ailleurs, nous nous
plaçons sur un intervalle de
temps tel que l'on peut négliger la durée du choc devant chacun des temps de
vol considérés.
EE PE
In (Tn/T1)
0 2 . 6 8 10 12 14 16
FIGURE 2 -- Durée 7» = tn+1 -- tn du rebond n (n > 1), entre les impacts n et n
+1 de la balle contre la
surface, en fonction de n (représentation dans le système de coordonnées
linéaire-logarithmique).
Exprimer, dans le cadre du modèle adopté (illustré sur la figure (1)), la
dépendance de la variable
In (7r}/T1) en fonction du coefficient r et de n.
Ce modèle paraît-il en accord avec les résultats présentés sur la figure (2)
(pour la gamme de vitesses
d'impact considérée) ?
Estimer, à partir de ce tracé, la valeur du coefficient de restitution en
vitesse r.
-- Page 2/16 -
50
55
60
65
70
75
2 Synchronisation des rebonds d'une balle sur une surface en mouvement vertical
oscillant.
Nous nous proposons d'étudier les rebonds d'une balle de tennis de table sur
une surface rigide qui oscille
verticalement, de façon sinusoïdale. En pratique, cette surface est fixée sur
la partie mobile (noyau) d'un
pot vibrant !. Ce dernier est commandé en courant par l'intermédiaire d'un
amplificateur de puissance
commandé par un générateur de tension sinusoïdale ?. Le paramétrage du système
constitué de la surface
rigide (S) oscillant verticalement et de la balle (B) est représenté sur la
figure (3).
À
Z
Balle (B) IE
7 À
[F
na h
Surface (S)|
|
s Origine des altitudes
O
FIGURE 3 -- Système constitué de la surface rigide (S) en mouvement vertical (4
= z(t)) et de la balle (B)
en mouvement balistique (h = h(t)) dans le champ de pesanteur g.
e Nous notons :
e R = R(O,z), le référentiel d'étude, supposé galiléen (ce n'est plus celui
utilisé dans la partie (1)):
e j -- ---ge,, l'accélération de la pesanteur ;
e m, la masse de la balle;
e 2 et Us = UE, (Us = À), respectivement l'altitude et la vitesse de la surface
mobile ;
+ hetü--=ve, (v = h), respectivement l'altitude et la vitesse de la balle:
e U O--v ee, (v <0)et V7 = vTé,, respectivement les vitesses de la balle immédiatement avant et après un choc contre la surface ; e r (r EURl0,1|), le coefficient de restitution en vitesse caractérisant le choc entre la balle (B) et la surface rigide (S) (r = --vT/v. dans le cas particulier où vs = 0). Ce coefficient est supposé indépendant de la vitesse d'impact. e Nous considérons que les chocs entre la surface et la balle sont "instantanés" et, par ailleurs, qu'ils ne perturbent pas le mouvement de la surface. L'évolution temporelle z = z{(t) de son altitude est donc imposée par la différence de potentiel délivrée par le générateur, indépendamment de l'action qu'exerce la balle sur la surface lors d'un choc. 4. Établir que la vitesse v* de la balle s'exprime selon la relation suivante : = ru + (1+r)u(t;) (2) où {; est l'instant de l'impact balle-surface considéré. 2.1 Condition de synchronisation. Il s'agit de déterminer à quelle condition les rebonds de la balle (B), sur la surface (S) oscillant verti- calement de façon sinusoïdale, sont synchronisés sur le mouvement de cette dernière. La figure (4) donne une illustration, dans un cas quelconque, des évolutions temporelles z = z{t) et h -- h(t) des altitudes respectives de la surface en mouvement et de la balle, centrées sur le rebond n. 1. Un pot vibrant possède une structure analogue à celle d'un haut-parleur électrodynamique. 2. Afin d'assurer la stabilité des rebonds dans le plan horizontal, la balle peut être guidée par un tube en plexiglass. On peut également utiliser une surface (S) présentant une légère concavité. 3. La masse de l'ensemble mobile constitué de la surface et du noyau du pot vibrant est très supérieure à celle de la balle. -- Page 3/16 - Z 7 TT » N + VA NN fr / | Balle (B) V4 Rebondn \ / , / h-- \ / \ ÿ h=h(t) \ / ù ' \ / \ / | , \ / \ / EN L .... \ + (uv, À , /(vn) (v11 (vx) D. \y 0 Fu | >
A
0 DA ln RNA Ln+1 N
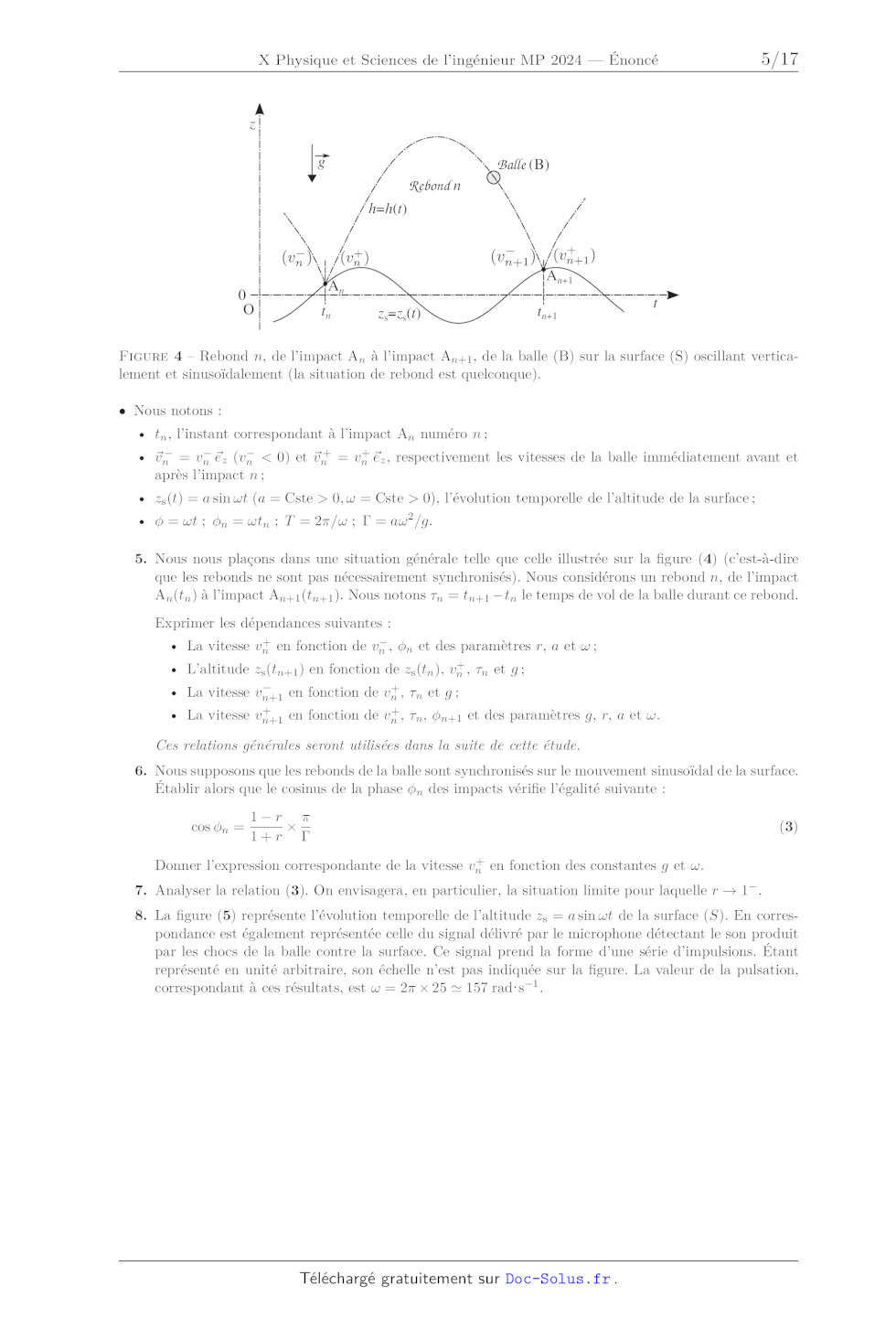
FIGURE 4 -- Rebond n, de l'impact A, à l'impact A,:1, de la balle (B) sur la
surface ($) oscillant vertica-
lement et sinusoïdalement (la situation de rebond est quelconque).
e Nous notons :
LE SR LE Le .
° tn, l'instant correspondant à l'impact À, numéro n ;
80 eo D, --=v,e, (v, <0)et w} = v} EUR,, respectivement les vitesses de la balle immédiatement avant et après l'impact n ; e zs(t) = asinwt (a = Cste > 0,w = Cste > 0), l'évolution temporelle de
l'altitude de la surface :
° D = Ut ; On = Wtn ; T'= 27 /w ; D = aw"/g.
5. Nous nous plaçons dans une situation générale telle que celle illustrée sur
la figure (4) (c'est-à-dire
85 que les rebonds ne sont pas nécessairement synchronisés). Nous considérons
un rebond n, de l'impact
An(tn) à l'impact A,11(t4n+1). Nous notons 7y = tn11 --tn le temps de vol de la
balle durant ce rebond.
Exprimer les dépendances suivantes :
e La vitesse vf en fonction de v, , d, et des paramètres r, a et w;
+ L'altitude z,(4,11) en fonction de Ztn), 7
nn & g;
90 « La vitesse v,,, en fonction de vf, 7 et g:
e La vitesse uv}. en fonction de uT, 7». dn11 et des paramètres g, r, a et w.
n+1 n ? ) + P g, Tr,
Ces relations générales seront utilisées dans la suite de cette étude.
6. Nous supposons que les rebonds de la balle sont synchronisés sur le
mouvement sinusoïdal de la surface.
Etablir alors que le cosinus de la phase ©, des impacts vérifie l'égalité
suivante :
1+r T (8)
05 Donner l'expression correspondante de la vitesse vf en fonction des
constantes g et w.
7. Analyser la relation (3). On envisagera, en particulier, la situation limite
pour laquelle r -- 17.
8. La figure (5) représente l'évolution temporelle de l'altitude z = asinwt de
la surface (S). En corres-
pondance est également représentée celle du signal délivré par le microphone
détectant le son produit
par les chocs de la balle contre la surface. Ce signal prend la forme d'une
série d'impulsions. Étant
100 représenté en unité arbitraire, son échelle n'est pas indiquée sur la
figure. La valeur de la pulsation,
correspondant à ces résultats, est w = 27 x 25 © 157 rad:s !.
-- Page 4/16 -
105
z, (mm)
0.6 | 0.8
wt/(2r)
FIGURE 5 -- Évolution temporelle de l'altitude z; = asinuwt de la surface (S)
et celle du signal de détection
des chocs de la balle contre cette dernière (w = 27 x 25 + 157 rad-s7!). Sur
l'intervalle de temps considéré,
ce signal fait apparaître deux impulsions correspondant, chacune, à un choc.
Estimer, à partir de ces données, la valeur du coefficient de restitution en
vitesse r. Afin de faciliter
les calculs numériques, on tirera parti des indications suivantes : la valeur
de r est proche de l'unité
et celle de D, proche de x/4.
2.2 Condition de stabilité.
Nous nous proposons d'analyser la stabilité de la situation de synchronisation
des rebonds sur la période
T' des oscillations harmoniques de la surface. Pour cela, nous supposons que
l'instant d'impact et la vitesse
de la balle immédiatement après cet instant s'écartent légèrement de la
condition de synchronisation. La
figure (6), centrée sur le rebond n, illustre cette situation.
À
z PR
7 "
--- f ù
E VA N\ Balle (B)
Î Rebondn
/ | /
4 h=h(t) \ | A
/ \ /
/ +/ LAN +!
A, A', AUA ) CE } (vi )
WATN AR UN
------ AS
0 DA ln RNA Lu Au
[ U l nl
FIGURE 6 -- Rebond n, de l'impact A", à l'impact A,,,, de la balle (B) sur la
surface (S) oscillant vertica-
lement et sinusoïdalement : situation s'écartant légèrement de la condition de
synchronisme correspondant
à la suite (A,) des impacts.
-- Page 5/16 -
110
115
120
125
130
140
Les variables (t},, vi 1. ......) auxquelles est affecté le signe " se
rapportent à la situation pour laquelle les rebonds
sont légèrement désynchronisés par rapport au mouvement périodique de la
surface. Les autres (tn, v},....)
correspondent à la situation de synchronisme étudiée dans la section (2.1).
Indication : Pour traiter les questions (9) et (10), on s'appuiera sur les
résultats généraux établis en réponse
à la question (5).
9. Nous considérons le rebond n de la balle entre les impacts A!, et A/,,,.
Établir la relation liant les
phases #/,,1 = wt!,, et 4}, = wt!,. Cette relation fait intervenir la vitesse +
et les constantes g, a et
W.
/ / \
10. Pour le rebond n, exprimer la vitesse v,, en fonction de vf , 4,11, d, et
des paramètres r, g, a et
W.
e Afin d'étudier la stabilité de la situation pour laquelle les rebonds sont
synchronisés, nous considérons
que chaque impact A' reste voisin de son correspondant "synchronisé" A,.
Ecrivons alors les variables d!,
/ .
et v} sous la forme suivante :
Dn = Pn + 2TEn Où Enl K 1
(4)
ve = vu (1+mn) où [nl K1
I s'agit d'étudier les propriétés des suites (£:) et (nn). Dans cette étude
perturbative, toutes les fonctions
et équations seront développées au voisinage de la situation de synchronisme
(9,,v7), en se limitant au
premier ordre vis-à-vis des termes d'écart £n et Mn.
Dans ces conditions, le développement des relations obtenues en réponse aux
questions (9) et (10) conduit
aux relations de récurrence linéaires suivantes :
En © En + ET mn (5)
Mn+1 -- -- (27 (1 = r) tan On) En + (r° En (1 = r°) tan On) Tn (tan On -- Cste)
(6)
Afin de rendre ces relations plus aisément maniables, nous les écrivons sous la
forme suivante :
En+1 = An + Bnn où (A4,B)EEUR R°
Nnai = CEn+Dnn où (C,D)ER°
Par ailleurs, nous les étendons aux suites complexes (EUR,) et (n,) telles EUR,
= Re(e,) et mn = Im(m,).
11. Former la relation de récurrence ne portant que sur des termes de la suite
(£EUR,,), liant EUR,,9, EUR et en.
On conservera les paramètres À, B, Cet D sans expliciter leur dépendance
vis-à-vis des paramètres
r et tan @h.
e Nous recherchons les solutions générales de cette suite récurrente linéaire
du deuxième ordre sous la forme
suivante :
En = Ku" où K=Cste EC et u=CsteEe CC (8)
12. Indiquer à quelle condition générale, portant sur la raison y, la suite
(£,) converge vers zéro.
13. Établir que la raison u vérifie l'équation algébrique suivante :
du? -- 2Qru +r° = 0 (9)
On exprimera le produit 2Qr en fonction des constantes r et tan ®.
14. Nous nous plaçons dans le cas où Q EUR Di = |-1, +1]. Exprimer, en fonction
de r et Q, les solutions
u- et + de l'équation (9). Analyser le comportement correspondant de la suite
(£,). Préciser quelle
en est la conséquence sur la stabilité de la situation de synchronisation des
rebonds, dans ce cas.
-- Page 6/16 -
145
150
155
160
e Nous envisageons le cas où Q EUR Da =] -- æ, -- 1] U[1I, + ol.
15. Exprimer, en fonction de r et Q, les solutions u_ et 4 de l'équation (9).
Représenter l'allure graphique
de la dépendance de chacune d'elles vis-à-vis du paramètre Q.
16. En s'appuyant sur l'allure des représentations graphiques des dépendances
u+ = u+(Q) et u- --
u_(Q), déterminer la condition de stabilité des rebonds synchronisés, sur le
domaine D2. On fera
porter cette condition sur le produit 2Qr.
17. Établir que la condition de stabilité de la situation pour laquelle les
rebonds sont synchronisés, sur la
réunion des deux domaines D, et D), prend la forme suivante :
2(1 +7) (O 500 N.m ! > 0.6 N.mrad !
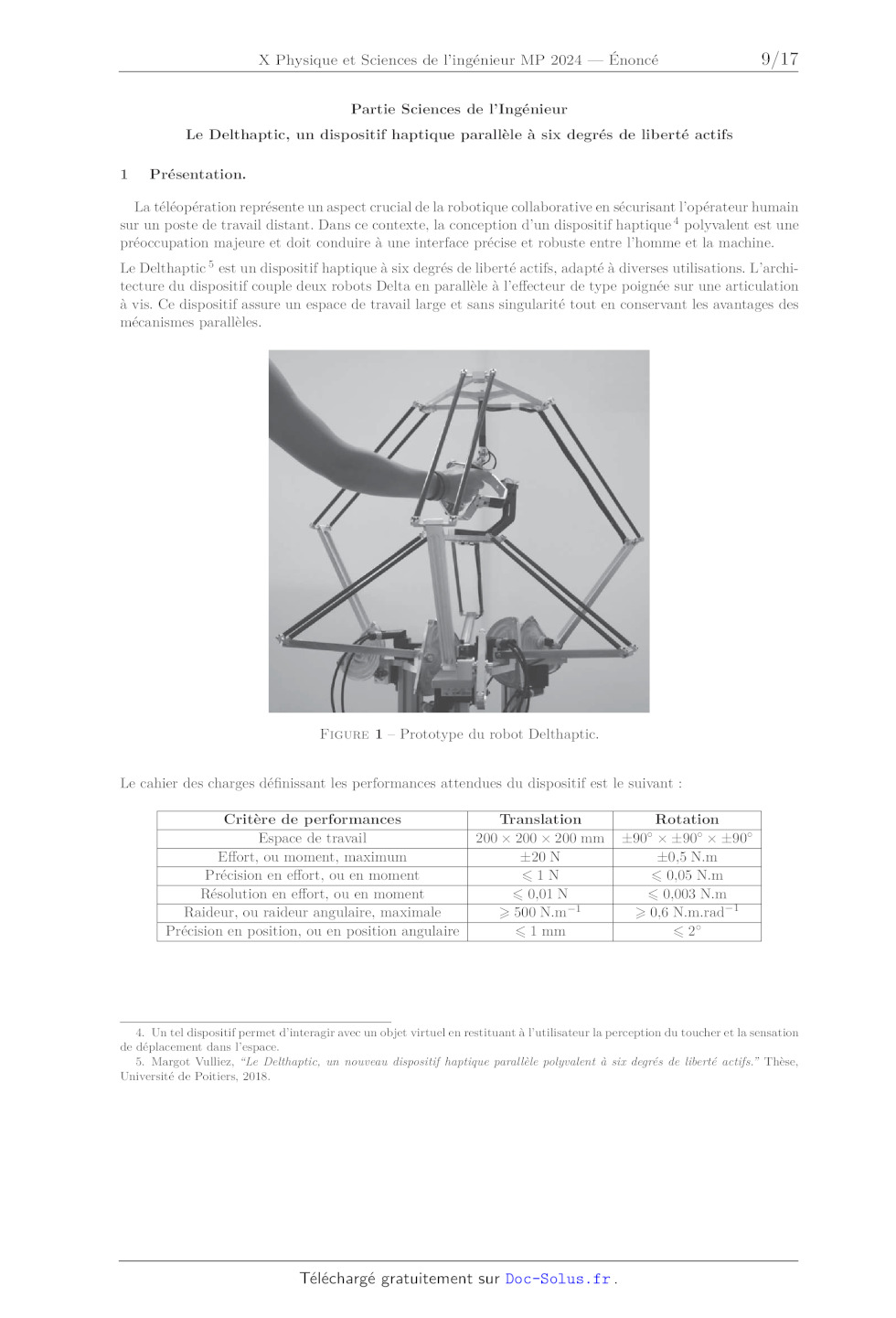
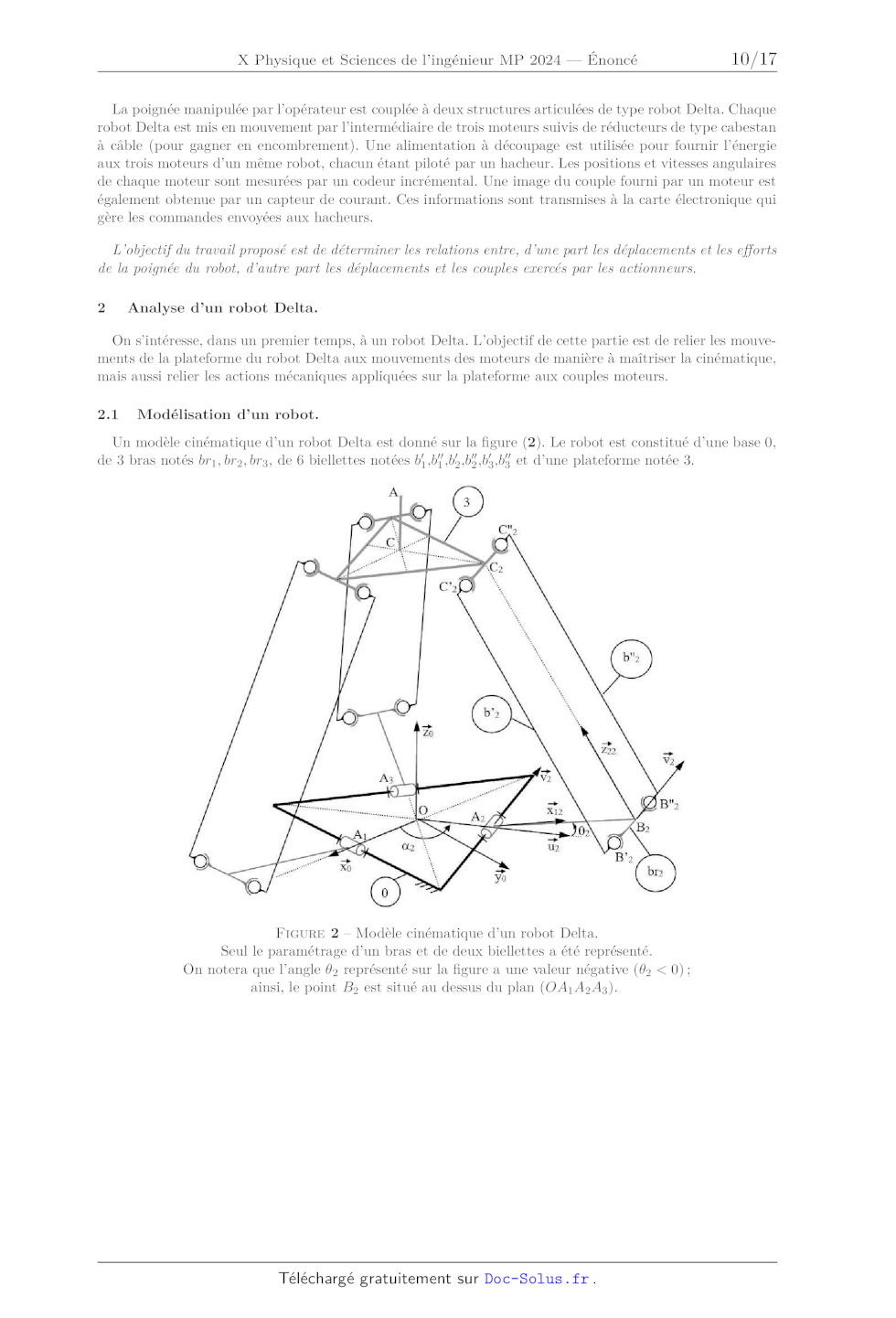
Précision en position, ou en position angulaire < 1 mm < 2° 4. Un tel dispositif permet d'interagir avec un objet virtuel en restituant à l'utilisateur la perception du toucher et la sensation de déplacement dans l'espace. 5. Margot Vulliez, "Le Delthaptic, un nouveau dispositif haptique parallèle polyvalent à six degrés de liberté actifs." Thèse, Université de Poitiers, 2018. -- Page 8/16 - 180 190 La poignée manipulée par l'opérateur est couplée à deux structures articulées de type robot Delta. Chaque robot Delta est mis en mouvement par l'intermédiaire de trois moteurs suivis de réducteurs de type cabestan à câble (pour gagner en encombrement). Une alimentation à découpage est utilisée pour fournir l'énergie aux trois moteurs d'un même robot, chacun étant piloté par un hacheur. Les positions et vitesses angulaires de chaque moteur sont mesurées par un codeur incrémental. Une image du couple fourni par un moteur est également obtenue par un capteur de courant. Ces informations sont transmises à la carte électronique qui gère les commandes envoyées aux hacheurs. L'objectif du travail proposé est de déterminer les relations entre, d'une part les déplacements et les efforts de la poignée du robot, d'autre part les déplacements et les couples exercés par les actionneurs. 2 Analyse d'un robot Delta. On s'intéresse, dans un premier temps, à un robot Delta. L'objectif de cette partie est de relier les mouve- ments de la plateforme du robot Delta aux mouvements des moteurs de manière à maîtriser la cinématique, mais aussi relier les actions mécaniques appliquées sur la plateforme aux couples moteurs. 2.1 Modélisation d'un robot. Un modèle cinématique d'un robot Delta est donné sur la figure (2). Le robot est constitué d'une base 0, de 3 bras notés br1,bro,br3, de 6 biellettes notées b',b7,b5,05,b3,b% et d'une plateforme notée 3. A 3 \ C" KR. (os #0 { PA C2 : C'2 b'2 -- ae Z22 + V2 -- A3 --$ "3 ET 27 B" mn a NO ï Me À D à - | o) B>
--+
Le: u2
L]
ed 4 '
és k * =.
0
FIGURE 2 --- Modèle cinématique d'un robot Delta.
Seul le paramétrage d'un bras et de deux biellettes a été représenté.
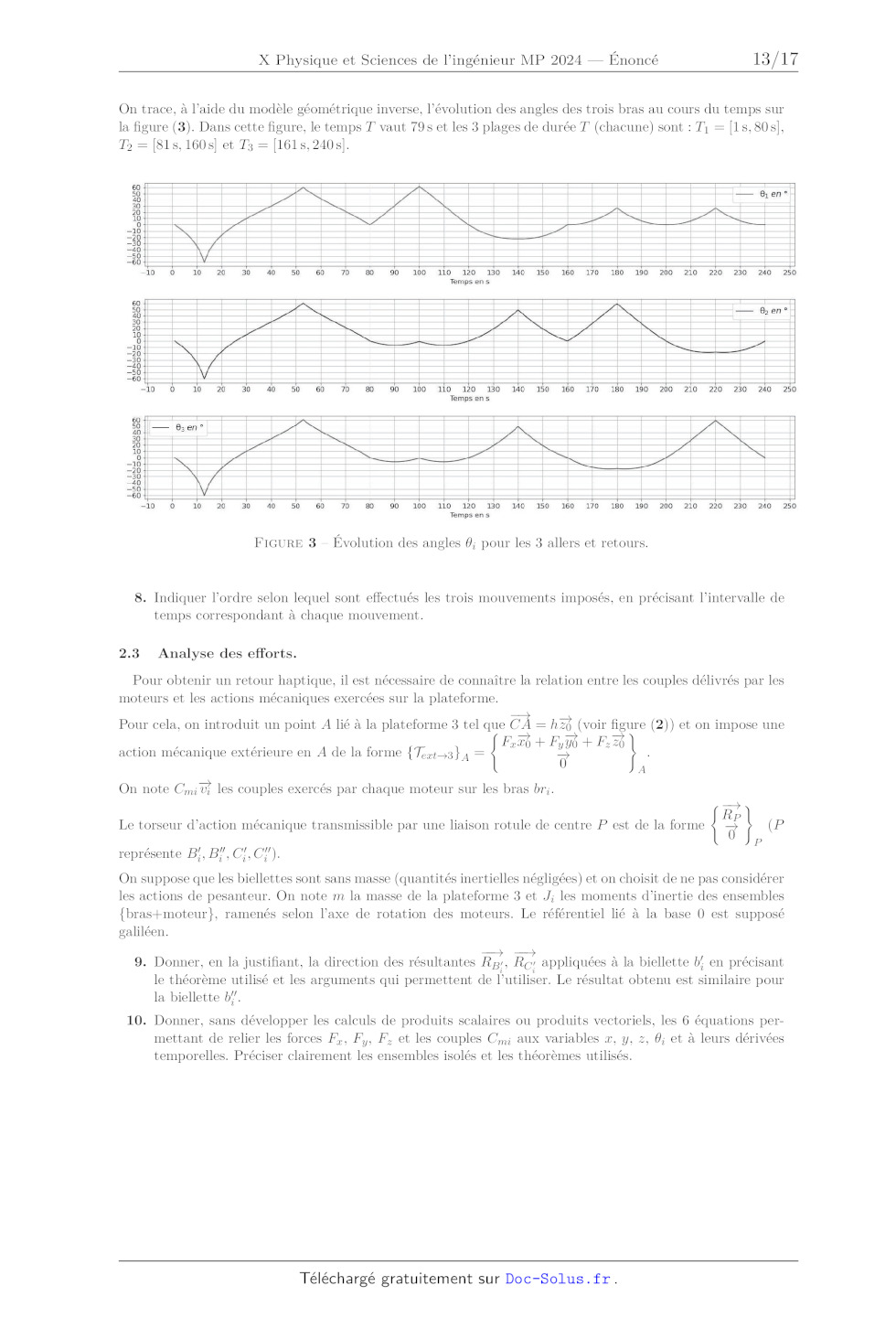
On notera que l'angle @ représenté sur la figure à une valeur négative (02 < 0) ; ainsi, le point B2 est situé au dessus du plan (OA: 4243). -- Page 9/16 - -- 195 ° On associe, à la base 0, le repère Ro -- (O,x6,y6, 2%). Les points À;, à EUR {1,2,3} sont tels que OA; -- Lou? avec (x0,u) = (you) = a, où o, à EUR {1,2,3} sont des angles constants (à n'utiliser que sous forme littérale dans tout le sujet). e On associe, à chaque bras br;, le repère R1; -- (AT, yr5,215) tel que Uri = y et (Z6,21) -- (ui ,x1;) -- Ô,;, où 0, E [---r/2, + 7/2]. Le point B,; est défini par A;B; -- Lx et il est situé au milieu des centres B; 1! a: 1B. = B.B" = ev! 200 et B; de 2 liaisons rotules, de sorte que B;B; = B;B; = evi. « Les biellettes b{ et b7 sont de même longueur L2, ce qui se traduit par B'C* = BC? = L2 où C! et C' sont les centres de 2 liaisons rotules avec la plateforme 3. Le point C; est situé au milieu des points Cet C? et on a C{C? = BB! = 2e. On associe, à l'ensemble des deux biellettes b{ et b!/, le repère Rai = (Bit. yr.22) où BC = Liza. 205 e On associe, à la plateforme 3, le repère R3 -- (C,x$,y3,24) tel que CC -- Lau : les points C;, C* et C7 sont situés dans le plan de la plateforme 3 et les segments (C/C") et (C;C) sont orthogonaux. On rappelle que tous les trièdres (ti UE 2) introduits dans ce problème sont orthonormés et directs. 1. Montrer que les plans (C1C2C3) et (A1 4243) sont parallèles et justifier que la base associée au solide 3 est la même que celle associée à la base 0. 210 2. Préciser les degrés de liberté que possède la plateforme 3 et indiquer le type de mouvement qu'elle peut faire. 2.2 Analyse des configurations du robot Delta. On pose oO = xT0 + yyd +224. On cherche, dans cette partie, à mettre en relation les coordonnées x, y, 2 et les angles motorisés (ou pilotés) 6;. 215 3. Montrer, à partir du paramétrage proposé, que l'on obtient 3 équations de la forme : a + y +27 + A;x + Biy + Ciz = D; (1) On précisera les expressions des termes À;, B;, C; et D; en fonction des angles à; et 0; et des constantes géométriques Lo, Li, Lo, L3. 4. En combinant les relations (1), montrer que x, y, z vérifient les équations linéaires prenant la forme suivante : A1,2.% + Bi2.y +Ci2.2 = Dio A2,3.T +- B2 3.y +- C2,3.2 -- 3 (2) A3,1.T + B31.y + D3 1.2 -- 3; 220 Préciser les expressions des termes A;;,B;;,C;,D;; en fonction des À;,B;,C;,D;, puis en fonction des angles 6;, a; et des paramètres géométriques Lo, Li, Lo, et La. En utilisant deux des trois équations du système (2) et une équation (1), on peut déterminer les expressions de x,y,z en fonction des angles 0; pilotés, ce qui correspond à ce qu'on appelle, en robotique, le modèle géométrique direct. -- Page 10/16 - 225 230 235 240 245 255 e Les bras ont un débattement angulaire limité à +60°. 5. On s'intéresse ici aux configurations du robot Delta où les 3 angles pilotés 4; sont égaux, soit : Vi EUR {1,2,3}, 0; -- 0. Dans cette question, on pourra, si besoin, utiliser les valeurs des angles a;. On à : aj = 0, a2 = 27/3 et a3 -- Ar /3. a) En utilisant les relations (2), montrer que ces configurations conduisent toutes à æ = y = 0. En déduire la nature du mouvement du point C de la plateforme lorsqu'on fait varier 6. b) Montrer que les points ©, À;, B;, C; et C sont situés dans un même plan. Quelle forme particulière présente le parallélogramme B!B?C?C!7? c) Justifier que les configurations du robot Delta étudiées ici sont invariantes par une rotation d'axe et d'angle à préciser, et qu'elles possèdent aussi plusieurs plans de symétrie que l'on précisera. 6. En se limitant aux configurations du robot Delta possédant les symétries identifiées précédemment pour lesquelles x = y = 0, déterminer les expressions des valeurs minimale Zmin et maximale Zzmax de z, compte tenu du débattement angulaire des bras br;. En déduire l'expression du débattement linéaire Az selon 2. Calculer ce débattement Az en prenant Lo = 80 mm, Li = 200 mm, Lo -- 250 mm et L3 -- 100 mm. Commenter la valeur obtenue par rapport au cahier des charges. e On rappelle les valeurs des angles à; : @; = (i -- 1)2x/3 pour à EUR {1,2,3}. On s'intéresse maintenant aux configurations du robot Delta où deux des angles pilotés 4; sont maintenus égaux, le troisième angle piloté étant libre de varier indépendamment des deux premiers. On choisit ici de maintenir égaux 62 et 03 et on pose 02 -- 03 = 0. Ainsi le robot Delta possède 2 degrés de liberté, 41 et 6. 7. Dans ces configurations, le robot Delta présente-t-il des symétries particulières. Si oui, lesquelles ? Quel mouvement obtient-on en faisant varier les angles 0; et 0 en conservant 02 = 03 = 0 au cours du mouvement ? Ces deux questions sont intimement liées. Pour y répondre, on pourra s'aider du modèle cinématique du robot Delta et, si nécessaire, des relations (1) ou (2). e En agençant différemment les termes de l'équation (1), il est possible de déterminer les évolutions des angles 0; en fonction des paramètres de position du point C (x, y et z). On parle de modèle géométrique indirect. En se donnant des lois x(t), y(t) et z(t), on peut alors calculer les angles 4;(t) à imposer aux différents bras. On choisit de réaliser successivement des allers et retours selon les trois directions (T6,0 , 2) de la base Po entre des positions extrêmes, à partir de la position x = 0, y = 0, z = 20 du point © (position obtenue pour 0; = 0). Les trois mouvements imposés sont les suivants (l'ordre de description est arbitraire) : e Déplacement du point C selon xQ en maintenant y = 0, z = 20, et pour x évoluant linéairement de 0 à xo, puis de xzo à --%0, et enfin de --x0 à 0, selon le profil A représenté ci-contre (d = x) ; e Déplacement du point C selon ms en maintenant x -- L 0, z = 20, et pour y évoluant linéairement de 0 à vo, puis de Yo à --Yo, et enfin de --y0 à 0, selon le profil R . Ë t représenté ci-contre (d = Yo) ; Le / Cd e Déplacement du point C selon z4 en maintenant x -- mener | 0, y = 0, et pour z évoluant linéairement de 29 à Zmnax: puis de Zmax à Zmin. et enfin de Zmin à 20, selon un profil en dents de scie analogue aux précédents. -- Page 11/16 - 260 265 275 280 On trace, à l'aide du modèle géométrique inverse, l'évolution des angles des trois bras au cours du temps sur la figure (3). Dans cette figure, le temps T vaut 795 et les 3 plages de durée T (chacune) sont : 71 = [1s, 805], T} = [81s,160s] et T3 -- [1615s,2405s]. 60 + EE 20! 30 + 1 Se 2: 0 - --20 + ! --30 + --40 + --50 + --10 0 10 20 30 40 50 60 70 80 90 100 110 120 130 140 150 160 170 180 190 200 210 220 230 240 250 Temps en s 60 - 4 20 | 30 - 20 - 110 120 130 140 150 160 170 180 190 200 210 220 230 240 250 Temps en s _10 O 10 20 30 40 50 60 70 80 90 100 110 120 130 140 150 160 170 180 190 200 210 220 230 240 250 Temps en s FIGURE 3 -- Évolution des angles #; pour les 3 allers et retours. 8. Indiquer l'ordre selon lequel sont effectués les trois mouvements imposés, en précisant l'intervalle de temps correspondant à chaque mouvement. 2.3 Analyse des efforts. Pour obtenir un retour haptique, il est nécessaire de connaître la relation entre les couples délivrés par les moteurs et les actions mécaniques exercées sur la plateforme. -->
Pour cela, on introduit un point À lié à la plateforme 3 tel que C'À = Az (voir
figure (2)) et on impose une
-- -- --
/ . F326 + Fyy6 + F220
action mécanique extérieure en À de la forme {Tez+_3} 4 = au
(ææ)
A
On note Cu: les couples exercés par chaque moteur sur les bras br;.
RP
. L . .. P
Le torseur d'action mécanique transmissible par une liaison rotule de centre P
est de la forme 4 -- (P
P
représente B;, B7,C,C?).
Ü
On suppose que les biellettes sont sans masse (quantités inertielles négligées)
et on choisit de ne pas considérer
les actions de pesanteur. On note m la masse de la plateforme 3 et J; les
moments d'inertie des ensembles
{bras+moteur}, ramenés selon l'axe de rotation des moteurs. Le référentiel lié
à la base 0 est supposé
galiléen.
> --
9. Donner, en la justifiant, la direction des résultantes Rp, Ro appliquées à
la biellette b; en précisant
le théorème utilisé et les arguments qui permettent de l'utiliser. Le résultat
obtenu est similaire pour
la biellette b7.
10. Donner, sans développer les calculs de produits scalaires ou produits
vectoriels, les 6 équations per-
mettant de relier les forces F3, F,,, F, et les couples Ch; aux variables x, y,
z, 0; et à leurs dérivées
temporelles. Préciser clairement les ensembles isolés et les théorèmes utilisés.
-- Page 12/16 -
285
290
295
300
On pourrait dériver les modèles géométriques obtenus précédemment pour relier
les vitesses angulaires 0;
aux vitesses linéaires #, y et Z.
Ainsi, l'étude d'un robot Delta a permis de montrer que l'on peut relier les
couples moteurs et les vitesses
angulaires aux efforts appliqués sur une plateforme et aux vitesses linéaires
de celle-ci.
3 Analyse de la structure mécanique du Delthaptic.
Dans toute la suite, on considère seulement les plateformes a et b des deux
robots Delta constitutifs du
Delthaptic, et on suppose qu'elles peuvent fournir des forces «motrices» (F3,
F,, F,) et des vitesses linéaires
(+, y, 2) aux points À et B respectivement liés aux plateformes a et b (se
reporter à la figure (4)).
3.1 Conception du Delthaptic.
Le schéma cinématique du mécanisme complet, limité aux 2 plateformes Delta a et
b, à la tige { et à la
poignée p, est donné sur la figure (4).
Les deux plateformes sont en translation pure par rapport au bâti 0, compte
tenu du fonctionnement des
robots Delta.
FIGURE 4 -- Modèle cinématique du robot Delthaptic.
11. Représenter le graphe des liaisons associé au modèle décrit par le schéma
cinématique de la figure (4).
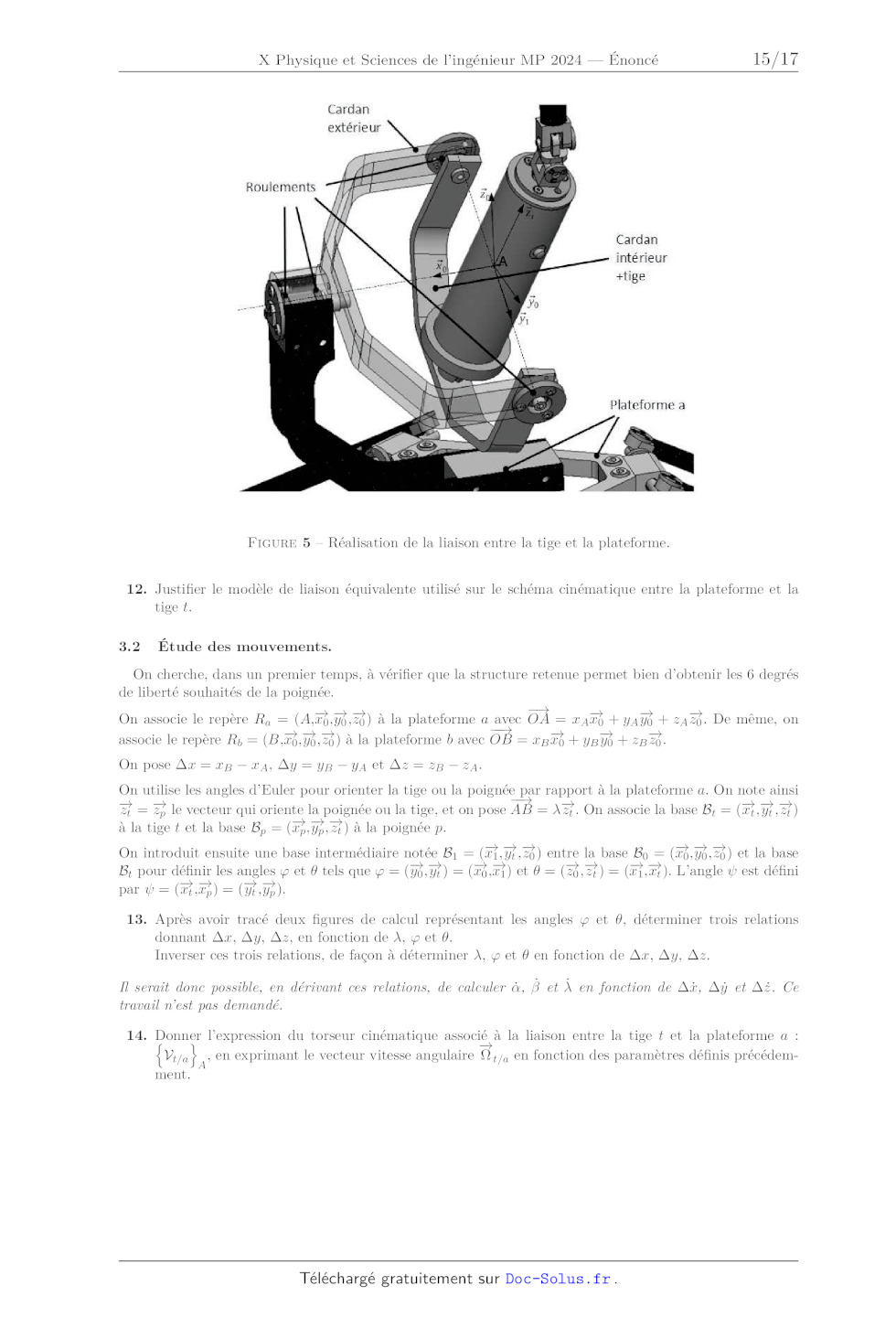
e La figure (5) fournit un zoom de la réalisation de la liaison entre la tige t
et la plateforme a. Une pièce
appelée cardan extérieur est placée entre la tige { et la plateforme a. La
partie appelée cardan intérieur est
solidaire de la tige t. On rappelle qu'un roulement à billes entre deux pièces
modélise, en première approche,
une liaison rotule entre ces deux pièces.
-- Page 13/16 -
305
310
315
320
Cardan
extérieur
Roulements
Cardan
intérieur
+tige
Plateforme a
FIGURE 5 -- Réalisation de la liaison entre la tige et la plateforme.
12. Justifier le modèle de liaison équivalente utilisé sur le schéma
cinématique entre la plateforme et la
tige £.
3.2 Étude des mouvements.
On cherche, dans un premier temps, à vérifier que la structure retenue permet
bien d'obtenir les 6 degrés
de liberté souhaités de la poignée.
| \ + A
On associe le repère R, -- (A,x6,ÿ0.2) à la plateforme a avec OA -- TATQ --
YAUQ -- ZA. De même, on
associe le repère À} -- (B,x0,y0 , 2) à la plateforme b avec O = xpTO + yBU0 LB.
On pose Az = 2pB --xA, Ay = yB -- YA et AZ = 2B -- ZA.
On utilise les angles d'Euler pour orienter la tige ou la poignée par rapport à
la plateforme a. On note ainsi
A -- 2} le vecteur qui oriente la poignée ou la tige, et on pose AB -- XZ{. On
associe la base B; = (x, y, 2)
à la tige t et la base B,, -- (x), y, 2) à la poignée p.
entre la base Bo = (T0 ,u0, 2) et la base
On introduit ensuite une base intermédiaire notée B; -- 2 re
-- (xô,x1) et 0 -- (4,2) -- (xi,2}). L'angle 4 est défini
B, pour définir les angles 4 et 0 tels que & = (y6 vi)
D >
par d = (xi,2») = (yi,Up).
13. Après avoir tracé deux figures de calcul représentant les angles & et 0,
déterminer trois relations
donnant Ax, Ay, Az, en fonction de À, w et 6.
Inverser ces trois relations, de façon à déterminer À, w et 0 en fonction de
Ax, Ay, Az.
Il serait donc possible, en dérivant ces relations, de calculer à, B et À en
fonction de Aïÿ, Aÿ et AG. Ce
travail n'est pas demandé.
14. Donner l'expression du torseur cinématique associé à la liaison entre la
tige & et la plateforme a :
{v ja} à en exprimant le vecteur vitesse angulaire {?;,/, en fonction des
paramètres définis précédem-
ment.
-- Page 14/16 ---
325
330
335
340
345
350
e Le pas de la liaison entre la tige t et la poignée p est noté pas et est
supposé à droite.
15. a) Exprimer le torseur cinématique associé à la liaison entre p et #, 2 #},
en fonction de À et , en
précisant la relation signée entre ces deux grandeurs.
b) Donner, sans calcul, les torseurs cinématiques 22 po} et {v oo}. en fonction
des composantes
des vitesses de À et de B dans le référentiel Ro = (O, TO, y6, 20).
e Pour analyser les mouvements de la poignée, on introduit le centre de masse G
de la poignée p situé sur
--
Q (p/0
son axe (B,z;) tel que BG = _H7% où H est une constante et on pose {y (p/0)
0}. =
Ja | V(G,»/0)
Les degrés de liberté associés à ces 2 vecteurs correspondent aux 6 mouvements
que l'utilisateur doit pouvoir
réaliser.
16. Montrer que l'on peut exprimer le vecteur vitesse angulaire d(p/ 0) et la
vitesse linéaire V'(G;p/ 0) en
fonction des paramètres définis ou déterminés précédemment. Il est demandé de
poser les calculs de
produits vectoriels mais de ne pas les effectuer. Il n'est pas nécessaire, dans
cette question, d'exprimer
ces vecteurs dans la base Bo.
On constate, au vu des résultats obtenus, qu'il est donc possible d'obtenir 6
degrés de liberté indépendants
en pilotant les 2 plateformes Della.
e On se place dans une configuration initiale où la poignée est verticale
(dirigée selon %) et À = Ào, pour
laquelle les angles w, 0 et 4 sont nuls. On note V (V > 0) une vitesse positive.
17. Recopier le tableau ci-dessous. À l'aide du schéma cinématique, compléter
ses cases par les valeurs 0.
V ou --V pour indiquer quelle vitesse imposer à chacun des degrés de liberté de
chacune des deux
plateformes, en vue d'obtenir les mouvements et sens souhaités.
Mouvement et sens souhaités TA | YA | ZA | TB | YB | ZB
Translation selon +1 : Ty
Translation selon +2zf : T 20
Rotation selon (G,x6), sens direct : Ry,
Rotation selon (G',z6), sens direct : Re
3.3 Action ressentie sur la poignée.
On applique une action mécanique sur la poignée de la forme {Text-p}e = ï
G
On rappelle que l'action mécanique appliquée par l'intermédiaire de la
plateforme a au point À, transmise
F --
par la liaison en À, sur la tige t{ est de la forme {7,5} 4 = " avec FA = Farto
+ FAyy0 + F1,20. De
même, l'action mécanique appliquée par l'intermédiaire de la plateforme b au
point B sur la poignée p est
F --
de la forme {T5_p}p = 1 avec FR = Fpyt0 + Fyy0 + Fp,20.
B
A --D ---E
On note m, la masse de la poignée et on pose 1,(G) = | --D B ---F la matrice
d'inertie en
--E --F C
(pUp, 2)
G de la poignée p. Afin de simplifier, on suppose négligeables les éléments
d'inertie m, et I, de la tige t.
-- Page 15/16 -
18. Compte tenu de la forme de la poignée, visible sur la figure (5), proposer
une simplification pour la
matrice d'inertie Z,(G). Calculer ensuite le moment cinétique en G de p/0 : &
(G,p/0) en le décompo-
sant dans la base B; -- (x? , y, 2) et en exprimant ses coordonnées en fonction
des angles 4, 6, 4 (et
355 de leurs dérivées temporelles) et des éléments pertinents de la matrice
d'inertie Z,(G).
-- -- --
19. Déterminer les relations vectorielles entre F1, FB et F. M en fonction des
paramètres géométriques
et cinétiques. Préciser le(s) théorème(s) ou principe(s) utilisé(s) et le
système isolé.
On ne développera pas les calculs de produits vectoriels ou de dérivées.
Cette étude a permis de montrer qu'il était possible de relier les efforts
appliqués sur la poignée aux efforts
360 sur les plateformes et, à l'aide du travail de la première partie, de les
relier aux couples des moteurs des robots
Delta. Des simulations permettraient d'analyser la précision et la raideur dans
les différentes directions en
vue de valider le cahier des charges.
-- Page 16/16 -