
Centrale Physique 1 PC 2005
| Thème de l'épreuve | Étude d'un capteur interférométrique de déplacement ou de déformation |
| Principaux outils utilisés | ondes électromagnétiques dans les diélectriques, interférences |
Corrigé
:👈 gratuite pour tous les corrigés si tu crées un compte
👈 l'accès aux indications de tous les corrigés ne coûte que 1 € ⬅ clique ici
👈 gratuite pour tous les corrigés si tu crées un compte
- - - - - - - - - - - -
👈 gratuite pour ce corrigé si tu crées un compte
- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
Énoncé complet
(télécharger le PDF)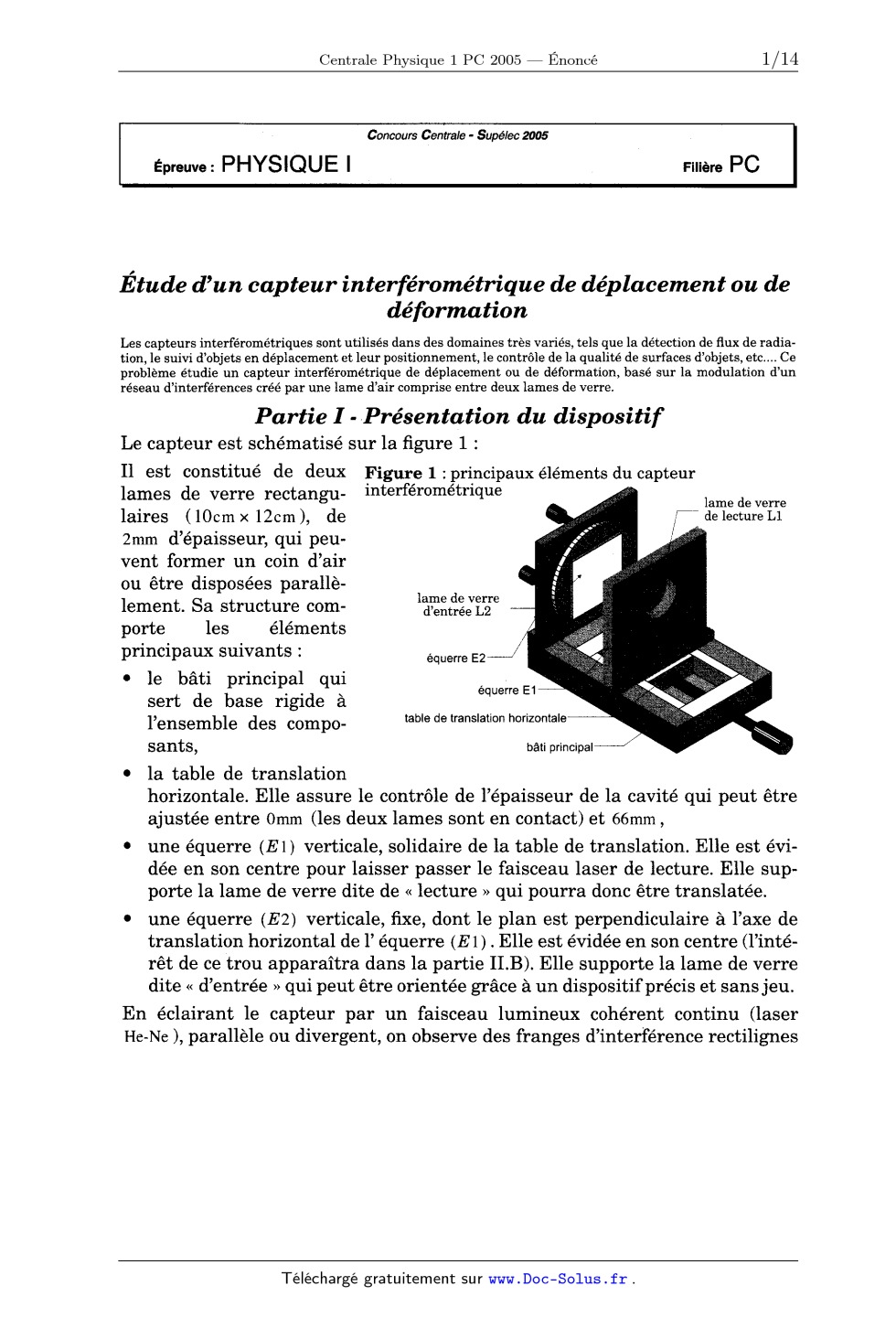
Rapport du jury
(télécharger le PDF)
Énoncé obtenu par reconnaissance optique des caractères
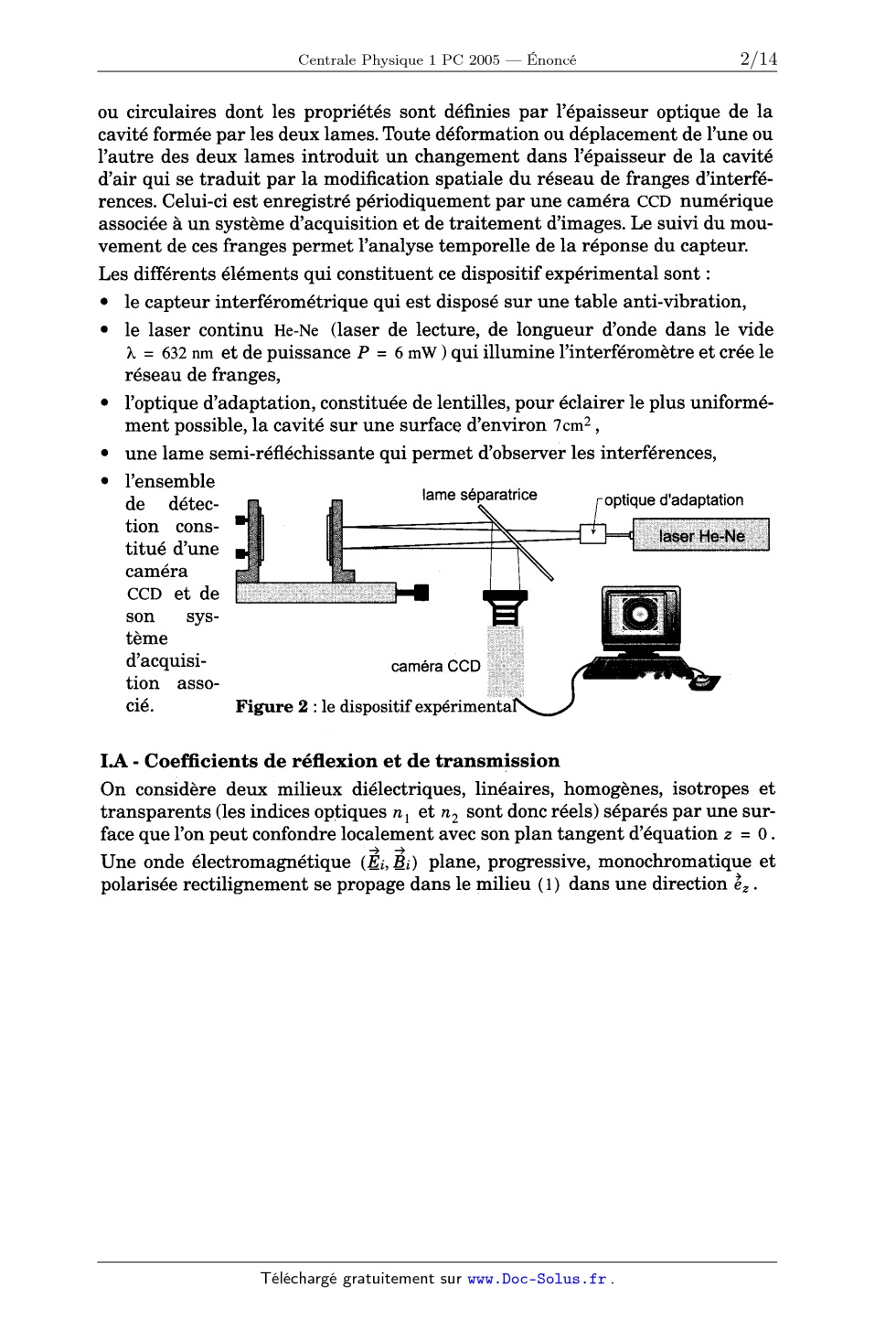
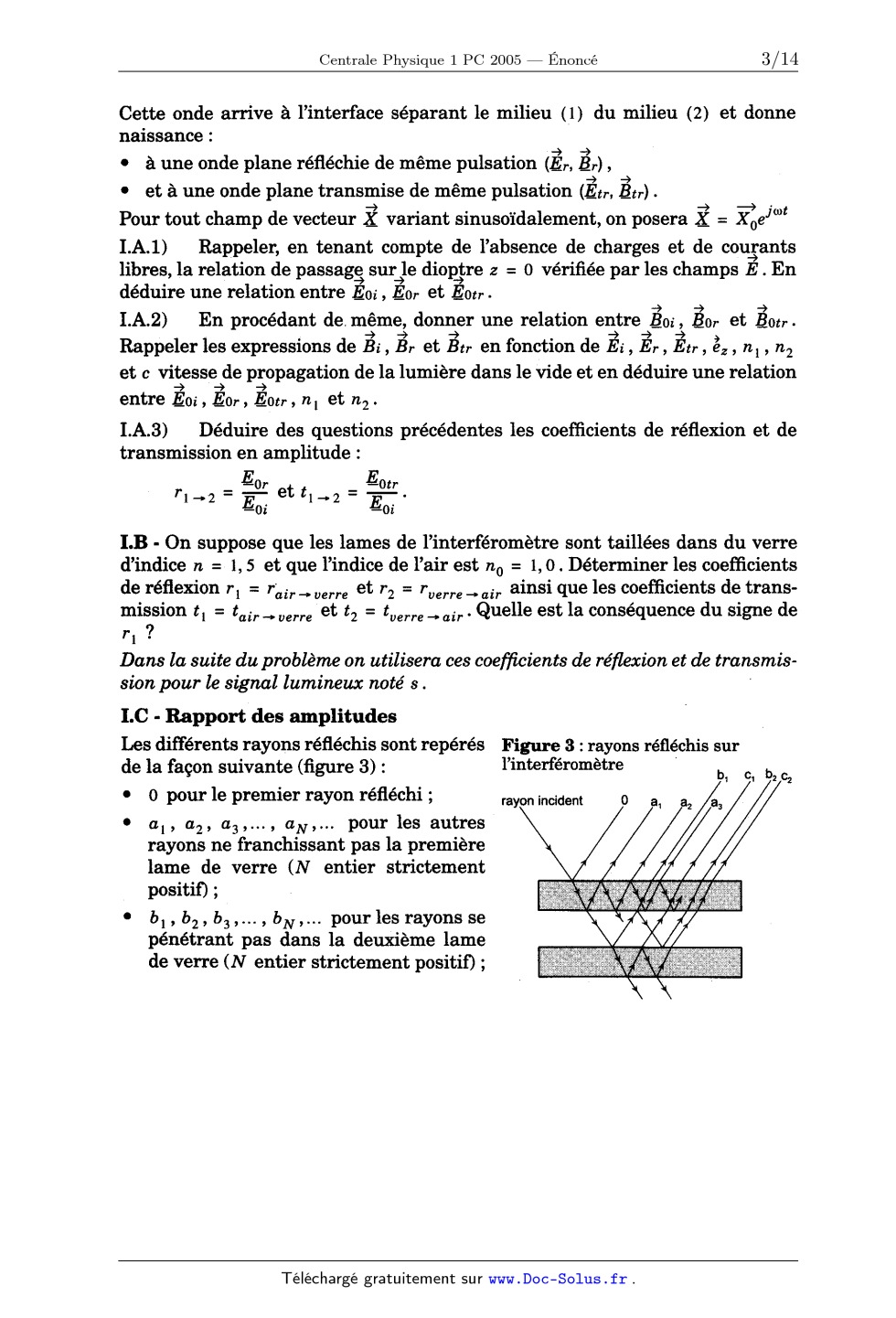
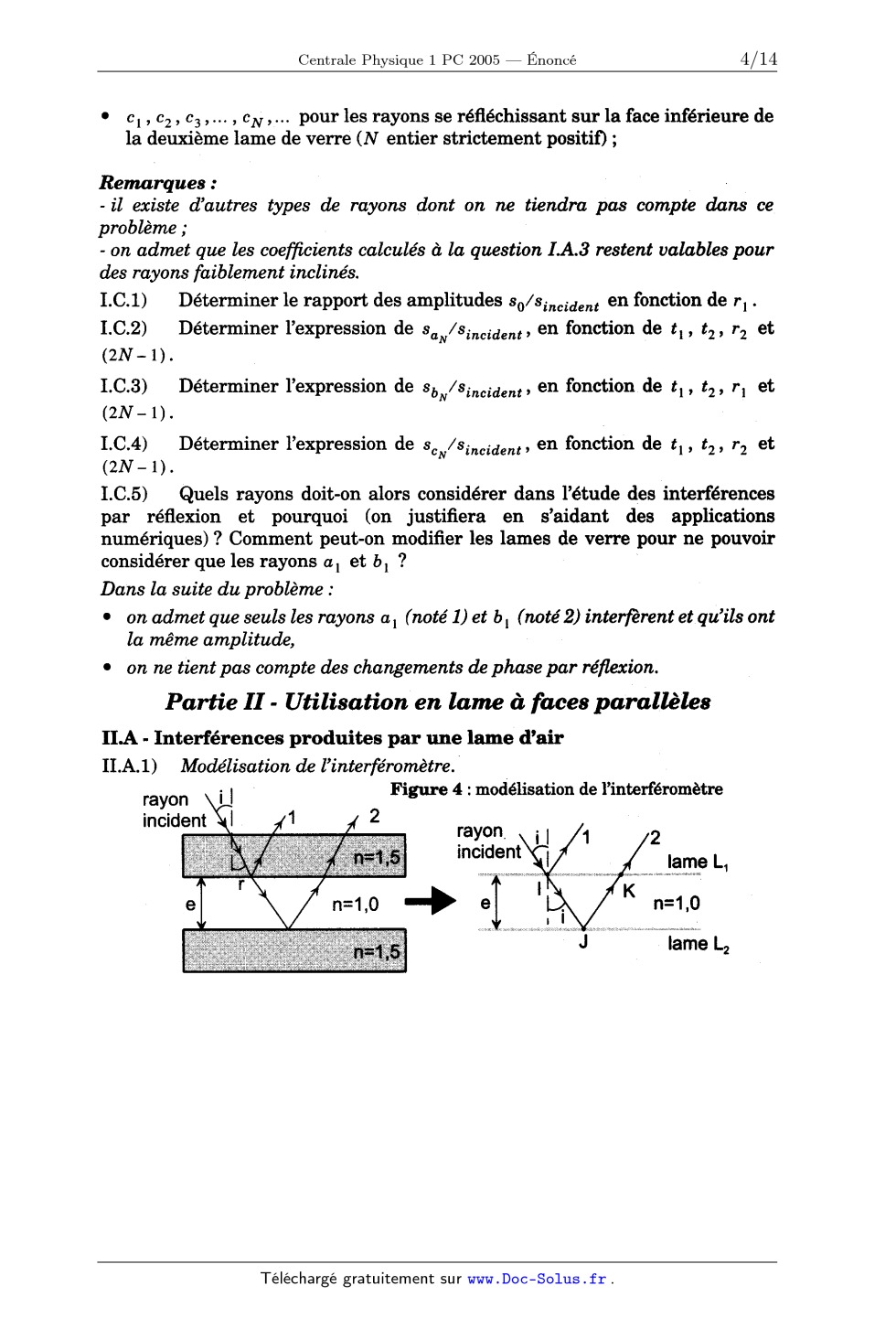
On-- _m..@_=u , _ u _ . , . _ ...DÛ_OE>In_ 5>=Êaw m8w umä%OE .. &OEÈmU &:880 Étude d'un capteur interférométrique de déplacement au de déformation Les capteurs interférométriques sont utilisés dans des domaines très variés, tels que la détection de flux de radia- tion, le suivi d'objets en déplacement et leur positionnement, le contrôle de la qualité de surfaces d'objets, etc.... Ce problème étudie un capteur interférométrique de déplacement ou de déformation, basé sur la modulation d'un réseau d'interférences créé par une lame d'air comprise entre deux lames de verre. Partie I - Présentation du dispositif Le capteur est schématisé sur la figure 1 : Il est constitué de deux lames de verre rectangu- laires (10cm >< 120m ), de 2mm d'épaisseur, qui peu- vent former un coin d'air ou être disposées parallè-- lement. Sa structure com- porte les éléments principaux suivants : ° le bâti principal qui sert de base rigide à l'ensemble des compo-- sauts, 0 la table de translation Figure 1 : principaux éléments du capteur interférométrique lame de verre de lecture L1 lame de verre d'entrée L2 équerre E2 équerre E1 table de translation horizontale bâti principal horizontale. Elle assure le contrôle de l'épaisseur de la cavité qui peut être ajustée entre Omm (les deux lames sont en contact) et 66mm , une équerre (El) verticale, solidaire de la table de translation. Elle est évi-- dée en son centre pour laisser passer le faisceau laser de lecture. Elle sup-- porte la lame de verre dite de « lecture » qui pourra donc être translatée. une équerre (EZ) verticale, fixe, dont le plan est perpendiculaire à l'axe de translation horizontal del' équerre (E 1) . Elle est évidée en son centre (l'inté- rêt de ce trou apparaîtra dans la partie ILE). Elle supporte la lame de verre dite « d'entrée » qui peut être orientée grâce à un dispositif précis et sans jeu. En éclairant le capteur par un faisceau lumineux cohérent continu (laser He--Ne ), parallèle ou divergent, on observe des franges d'interférence rectilignes ou circulaires dont les propriétés sont définies par l'épaisseur optique de la cavité formée par les deux lames. Toute déformation ou déplacement de l'une ou l'autre des deux lames introduit un changement dans l'épaisseur de la cavité d'air qui se traduit par la modification spatiale du réseau de franges d'interfé- rences. Celui-ci est enregistré périodiquement par une caméra CCD numérique associée à un système d'acquisition et de traitement d'images. Le suivi du mou-- vement de ces franges permet l'analyse temporelle de la réponse du capteur. Les différents éléments qui constituent ce dispositif expérimental sont : ° le capteur interférométrique qui est disposé sur une table anti-vibration, ° le laser continu He--Ne (laser de lecture, de longueur d'onde dans le vide >» = 632 nm et de puissance P = 6 mW ) qui illumine l'interféromètre et crée le réseau de franges, ° l'optique d'adaptation, constituée de lentilles, pour éclairer le plus uniformé- ment possible, la cavité sur une surface d'environ 7 cm2 , 0 une lame semi--réfléchissante qui permet d'observer les interférences, . l'ensemble de détec- tion cons- titué d'une caméra CCD et de son sys- tème d'acquisi- tion asso- cié. Figure 2 :le dispositif expérimehta lame séparatrice optique d'adaptation caméra CCD , I.A - Coefficients de réflexion et de transmission On considère deux milieux diélectriques, linéaires, homogènes, isotropes et transparents (les indices optiques n1 et n2 sont donc réels) séparés par une sur-- face que l'on peut confondre localement avec son plan tangent d'équation z 0 . Une onde électromagnétique (Êi, Ë5) plane, progressive, monochromatique et polarisée rectilignement se propage dans le milieu (1) dans une direction' ez. Cette onde arrive à l'interface séparant le milieu (1) du milieu (2) et donne naissance : 0 à une onde plane réfléchie de même pulsation (Êr. Êr) , \ _ A _ --> --) 0 et a une onde plane transm1se de meme pulsatmn (E... I_3tr) . "> . . .. "> ""> joet Pour tout champ de vecteur X var1ant s1nusmdalement, on posera X = X Oe LA 1) Rappeler, en tenant compte de l'absence de charges et de courants libres, la relation de passage sur le dioptre z = 0 vérifiée par les champs E. En déduire une relation entre Eoi , Êg,-- et Eau--. I.A.2) En procédant de. même, donner une relation entre Êoi , Êm-- et Êon. . _ --> -> --> _ --> --> --> , Rappeler les express1ons de Bi , Br et Btr en fonctmn de Et , Er , Etr , ez , n1 , n2 et c vitesse de propagation de la lumière dans le vide et en déduire une relation ---> ---> --> entre an, E0r, Een--, n1 et n,. I.A.3) Déduire des questions précédentes les coefficients de réflexion et de transmission en amplitude : E E --Or '-- l LB - On suppose que les lames de l'interféromètre sont taillées dans du verre d'indice n = 1,5 et que l'indice de l'air est "0 = 1, 0 . Déterminer les coefficients de réflexion r1 : fair--> verre et r2 : "verre __ air a1ns1 que les coeffic1ents de trans- mission t1-- : t et t2 : tverre __ air. Quelle est la conséquence du signe de ? r 1 . atr "' verre Dans la suite du problème on utilisera ces coefficients de réflexion et de transmis- sion pour le signal lumineux noté 8. I. C - Rapport des amplitudes Les différents rayons réfléchis sont repérés Figure 3: rayons réfléchis sur de la façon suivante (figure 3): l'interféromètre b1 c1 % c, ° 0 pour le premier rayon réfléchi ; ray... incident 0 81 32 33 ° a,, a2, a3,..., aN,... pour les autres rayons ne franchissant pas la première lame de verre (N entier strictement _ positif) ; ' b1 , b2 , b3 ,... , bN,... pour les rayons se pénétrant pas dans la deuxième lame de verre (N entier strictement positif) ; 0 c1 , c2 , c3 , , c N , pour les rayons se réfléchissant sur la face inférieure de la deuxième lame de verre (N entier strictement positif) ; Remarques: - il existe d' autres types de rayons dont on ne tiendra pas compte dans ce problème ; . - on admet que les coefficients calculés à la question IA.3 restent valables pour des rayons faiblement inclinés. I.C.1) Déterminer le rapport des amplitudes SO/Sincident en fonction de r] . I.C.2) Déterminer l'expression de sa N-/s en fonction de tl , .t2 , r2 et incident ' (2N -- l) . I.C.3) Déterminer l'expression de sbN/sinc,dent, en fonction de t1 , t2, r1 et (2N -- l). I.C.4) Déterminer l'expression de se N--/s en fonction de t1 , t2 , r2 et (2N--1). I.C.5) Quels rayons doit--on alors considérer dans l'étude des interférences par réflexion et pourquoi (on justifiera en s 'aidant des applications numériques) ? Comment peut-on modifier les lames de verre pour ne pouvoir considérer que les rayons a1 et b ? incident ' Dans la suite du problème . 0 on admet que seuls les rayons a1 (noté 1) et b1 (noté 2) interférent etqu'ils ont la même amplitude, 0 on ne tient pas compte des changements de phase par réflexion. Partie II - Utilisation en lame à faces parallèles II.A - Interférences produites par une lame d'air II.A.1) Modélisation de l'interféromêtreQ _ i | ' Figure 4 : modélisation de l'interféromètre rayon incident .............. _ , rayon incident Dans la suite du problème on modélise l'interféromètre par une lame d'air située entre deux lames infiniment minCes L1 et L2 semi--réfléchissantes, parallèles et distantes de e (figure 4). Justifier brièvement cette modélisation. Déterminer en fonction de n , e et i , la différence de marche 62,1 que présente, dans un plan perpendiculaire aux rayons 1 et 2 , le rayon réfléchi 2 par rapport au rayon réfléchi 1 . Dans la suite du problème on ne fera plus apparaître l'indice n car n = 1, 0 . II.A.2) Cas d'une source ponctuelle à distance finie. L'interféromètre est éclairé par» une e source ponctuelle 'monochromatique de longueur d'onde ?» , placée en S sur l'axe le àunedistance 018 = d de la lame. On observe les interférences,par réflexion, sur un écran E placé à une distance D de 01 . On suppose qu'un écran opaque P supprime la lumière directe de S sur E. lame L2 _ ' lame L ' a) Montrer que le dispositif est alors Fi 5: lame d'air et Source P0nctuelle équivalent à deux sources ponctuellesà iStanoe fime placées en S1 et S.,. Déterminer les longueurs S 0 et S20 .On pose a = SZS. Donner l'expression de a. Quelle distance DT sépare l'écran du milieu de [S 321 ? b) Qu' observe t-on sur l'écran. " Justifier sans calcul. Les interférences obtenues par ce dispositif sont--elles localisées ? c) Soit M un point de l'écran situé à une distance p du point 0 . Déterminer, en fonction de a , k , DT et p , l'expression du déphasage % /1(p) en M de l'onde issue de 82 par rapport à celle issue de S1 . On donnera le résultat sous la forme d'un développement limité d'ordre 2 en p (M reste au voisinage du point 0 ). d) Soit I0 l'intensité lumineuse du faisceau issu de la source S (et donc de 82 ) Etablir l'expression de l'intensité I (p) d'un point M de l'écran en fonction de I 0 , e) Donner l'expression de l'ordre d'interférence po au centre de la figure. On suppose que le centre de la figure correspond à un maximum de luminosité. Que peut--on en conclure sur po. ? On numérote les franges lumineuses à partir de 0 par l'entier K (valeur nulle au centre). Exprimer le rayon p K du K anneau lumineux en fonction de DT , K et pc. En déduire l'expression de p K + 1/ p K en fonction de K. D Application numérique ': on mesure sur l'écran p1 : 6, 6m . En déduire _p2 et p3 . Sachant que X = 632nm , D = 80cm et d = 20cm , calculer e. Que pensez vous de la précision de la mesure de e ? g) Qu'observe t-on sur l'écran si l'on augmente progressivement la taille de la source S ? Proposer une explication qualitative du phénomène. II.A.3) Cas d' une source étendue à distance finie. L'interféromètre est éclairé par une source étendue monochromatique de lon- gueur d'onde À . a) Soit un point de la source émettant un rayon lumineux sous une incidence i. Rap- source étendue peler l'expression, en fonction de i et e , de la différence de marche 62 /1 que présentent, dans un plan perpendiculaire aux rayons 1 et 2 , le rayon réfléchi 2 par rapport au rayon réfléchi ] . " rayon incident b) La différence de marche précédente ne J , lame L2 , ,. . . . Figure 6. lame d air et source depend que de lmc1dence l et pas du pomt étendue à distance finie de la source. Que peut-on en conclure sur la localisation des franges d'interférences. ? La largeur de la source intervient-elle sur le contraste ? Que détermine t-elle? c) Donner l'expression de l'intensité I (l) obtenue à l'infini dans la direction i en fonction de e , i et I () l'intensité lumineuse que l'on aurait sur l'écran si seule la lame L1 était présente. II.A.4) Observation avec une caméra CCD. L'interféromètre, CAMERA CCD model1se, par une laserHe_Ne I-- ---- -- -- ÏÆ&ZaiBÏÏ --: lame d a1r, est = au capteur CCD éclairé par le laser de lecture. Grâce àla lame semi-réfléchis-- sante et à la caméra CCD On enregistre la . . rence. La caméra est réglée, dans _ _ un premier Figure 7. enreg1strement de la figure d'interférence temps, pour que le plan d'observation (capteur CCD) soit confondu avec le plan focal image de l'objectif de la caméra assimilé à une lentille convergente de focale f" = 50... . a) Soit M un point du capteur CCD . On pose p : FM . Déterminer, en fonction de p , e et [' l'expression dela différence de marche 62 /1 entre les rayons réfléchis de type _ 2 et 1 convergeant en M (on effectuera, en les justifiant, les approximations usuelles). Faire un schéma des lames (L1 , L2 et semi-transpa- rente), de l'objectif et du capteur CCD en indiquant précisément les angles. b) Donner l'expression de l'ordre d'interférence p0 au centre de la figure. On suppose que le centre de la figure correspond à un maximum de luminosité. On numérote les franges lumineuses à partir de F par l'entier K (valeur nulle au centre). Exprimer le rayon p K du K 1ème anneau lumineux en fonction de f' , K et Po . :" c) On assimile le capteur CCD à un carré formé de pixels carrés jointifs. Soit 1 la longueur du côté d'un pixel. Les diamètres des anneaux sont déterminés en analysant le profil suivant un axe horizontal passant par le centre du système de franges. Soit N K le nombre de pixels correspondant au diamètre dK du K 1ème anneau. Déterminer l'expression de l'épaisseur e de la cavité en fonction de f" , >. , K , N K , et l . d) Application numérique: }" : 50mm et l : 23um. Pour K = 1, on mesure N1 : 28 pixels. Calculer e. e) La détermination précédente de e repose donc sur la mesure de N 1 . Estimer l'incertitude absolue sur N 1 et en déduire un encadrement de e . Conclure. On souhaite diminuer l'incertitude relative sur la mesure de e . 1ère méthode : " 0 On suppose, uniquement dans cette question, que l'objectif de la caméra est interchangeable (ou possède un réglage permettant de choisir différentes foca-- les). Que pr0posez-vous pour augmenter la précision de la mesure de e ? 2ème méthode : g) En supposant que le laser et son optique d'adaptation peuvent--être assimilés à une sOurce ponctuelle, que peut-on dire sur la localisation des franges ? À quelle distance D de la lame doit--on placer un écran pour observer des anneaux 4 fois plus grands que dans le plan focal de l'objectif de la caméra ? h) On suppose que la distance objectif-capteur CCD peut varier entre f et 2 f' . On souhaite former une image-réelle d'un objet réel. On suppose que la distance objet-objectif peut prendre toutes les valeurs possibles. Quelle distance objectif- capteur CCD doit--on choisir pour obtenir la plus grande image posSible ? Quelle doit-être alors la distance objet--objectif ? Quel est alors le grandissement de l'objectif ? ' i) En déduire la distance (lame de l'interféromètre) - (objectif de la caméra) pour obtenir sur le capteur CCD des anneaux 4 fois plus grands que ceux obser-- vés à la question II.A.4--a dans le plan focal image de l'objectif. Dans la suite du problème, le système est réglé de façon à obtenir" ce grandisse- ment de 4. On pourra, pour simplifier les raisonnements et les schémas, supposer que l'observation est réalisée à l'infini avec 'un objectif de distance focale feq = 4f -- , ILB - Méthode de suivi de franges circulaires. D'après la section II.A, l'observation des franges d'interférences renseigne sur l'épaisseur optique de la cavité formée par les deux lames. La figure d'interfé-- rence est enregistrée périodiquement par une caméra CCD numérique associée à un système d'acquisition et de traitement d'images. La déformation de la cavité optique est obtenue par l'action d'un deuxième fais- ceau laser (longueur d'onde - 800nm ) sur la lame de verre d'entrée revêtue d'une couche de gélatine, d'une épaisseur de 6um environ, qui absorbe l'énergie lumi- neuse d'excitation déposée. L'échaufl'ement local qui en résulte provoque une déformation mécanique et donc une variation de l'épaisseur de la cavité. La méthode proposée est basée sur le calcul de la variation de l'épaisseur de la lame d'air en fonction de la variation du rayon d'une frange circulaire. II.B.1) On considère une frange brillante donnée. Comment varie le rayon de cet anneau lorsq'ue l'épaisseur de la lame d'air diminue ? Déterminer l'expres- sion approchée de Ae / e (variation relative de l'épaisseur de la lame) en fonction de p , Ap et f'eq . On donnera le résultat sous la forme d'un développement limité à l'ordre 1 en p . ' Mise en oeuvre -- expérimentale : ' profil B ° on enregistre l'inter-- -- \ férogramme à un ins-- profil A _ tant t1 . Grâce à cette image, dite de réfé- rence, on trace un profil des niveaux de gris le long d'une droite horizontale . passant par le centre de la figure. 0 On détermine alors le. rayon d'une frange brillante donnée à ,. . . -4o so au 100 120 140 160 130 zo lmstant t1 ' Numéro du 5er o 1: x = a \ o 2 z Figure 8 : enregistrement du déplacement ' des franges circulaires 0 on procède de même à un instant t2 et on détermine le nouveau rayon de la - même frange brillante. . gràce àla relation entre Ae /e et Ap/p, on peut en déduire la variation rela-- tive de l'épaisseur de la lame. II.B.2) La figure 8 résume les résultats obtenus à l'aide de cette méthode. Les profils diamétraux correspondent, respectivement, à l'image de référence et à la première image après le début de l'excitation. On cherche à identifier le profil de l'image de référence. a) Chaque profil devrait admettre un axe de symétrie vertical. Pourquoi ? Citer une des causes possibles de cette absence de symétrie. Malgré l'absence de symétrie, comment peut--on repérer les pics correspondants au premier anneau? b) On rappelle que là cavité Optique est excitée par l'action d'un deuxième fais- ceau laser sur la lame de verre d'entrée. Quelle est, selon vous, la conséquence de l'action du laser __ sur cette lame ? Com-- ment varie alors l'épaisseur-- de la cavité optique ? c) En déduire le pro-- fil de l'image de réfé-- rence (A ou B ). Justifier. II.B.3) Donner une estimation du rayon , ' _ 1oeo mo ' ' Tem - s en millisecondes du prem1er anneau, , _ _ _ , _ , _ _ avant - et après Figure 9 . variation de ] épaisseur de la cav1té opt1que , _ , en fonction du temps exc1tat1on . "1, avan, et rl, après ' , Application numérique : largeur d'un pixel : l = 23 nm. II.B.4) En utilisant les questions II.A.4-c et II.B.1, déterminer une expression de la variation d'épaisseur Ae de la lame en fonction de "1, avant , "1, après et >. . Application numérique: >... = 632m_n ;largeur d'un pier : l : '23um. II.B.5) En répétant cette opération pour tous les instants d'échantülonnage, on peut tracer la courbe de variation de l'épaisseur de la cavité optique en fonc- tion du temps (figure 9). Déterminer la durée T de l'excitation. Grâce à un logi-- ciel informatique, la réponse a été modéli8ée par un système linéaire d'ordre 1 (courbe en traits pointillés). Déterminer le temps caractéristique r associé àla réponse de la lame (on précisera la méthode utilisée). Partie III - Utilisation en coin d'air On rappelle qu'on ne tient pas compte des changements de phase par réflexion. On se propose d'améliorer la méthode précédente. Pour cela on règle l'interféro-- mètre en coin d'air. HLA - Interférences produites par un coin d'air III.A.1) On éclaire un coin d'air sous incidence rayfln quasi normale. Reproduire et compléter la . incident figure 10 en traçant les rayons lumineux inter-- férant. En déduire la surface de localisation des . interférences dans le cas d'une source ponc-- tuelle, puis étendue. On utilise de nouveau le montage de la partie II. A. 4 (figure 7). L'interféromètre forme un coin Figure 10- inærférométre réglé d'air et le laser de lecture fournit un éclairage en coin d'air sous incidence quasi normale. On suppose que les franges sont visibles (entre autres) sur la lame d'entrée. La caméra est réglée pour former l'image d'une partie de cette lame d'entrée sur le capteur CCD. Le grandissement est égal à 1 en valeur absolue. On adopte donc les mêmes coor-- données sur la lame d'entrée et sur le capteur CCD. III. A. 2) Soient (x, y) les coordonnées d'un point M du capteur (et donc de la lame d'entrée). Donner l'expression de la différence de marche 62,1 en fonction de e(x, y) . En déduire l'expression de l'intensité 1 (x, y) au point M en fonCtion de e(x, y) , ). et IO intensité maximale. III.A.3) Déterminer, en fonction de k , 1 (x, y) , I 0 et d'un entier m , l'expression des épaisseurs e(x, y) possibles pour un point M (x, y) où l'intensité est I (x, y) . 111. B- Méthode de suivi des niveaux de gris Pour chaque point M (x, y) de la lame d'entrée, la détermination expérimentale des variations de e(x, y) comporte deux étapes: . l'extraction du signal interférométrique . on exploite les images enregistrées périodiquement pour suivre l'évolution du niveau de gris d'un pixel de la figure d'interférence. On obtient ainsi une courbe discrétisée qui représente la variation de l'intensité du, pixel sélectionné en fonction du temps. (figure 11) . "l'île traitement du signal interférométrique : on convertit l'intensité enregistrée en déplacement. III.B.1) Décrire qualitativement le mouvement de la lame avant, pendant et après l'excitation. Déduire de la figurell le mouvement des franges au point M considéré (on pré- cisera en particulier le nombre de franges défilant dans chaque phase). En déduire les instants tdébut et tfi_n de début et fin d'excitation de la lame. ' ' . III.B.2) Pour simplifier, on supp0se que le point étudié _ cor-- respond à une intensité nulle lorsque la lame est au repos. a) Montrer que, . pour o 800 1200 1000 mon 2400 t E [t 400ms] _ 7 Temps en müisecondæ début' _ , ' gare: vanatmn . e 1ntens1t . u p1xe s - ectmnn en le deplacement fonction du temps - de la lame est donné par : _è._1_ ' M- _ Ae--'4 harccos( Io l) l]. b) Déterminer l'expression de Ae pour t E [400ms,500ms]. III.B.3) Déterminer l'expression de Ae pour t E [tdébut,tfin] ; on pourra intro- duire un entier N 1 correspondant au nombre de franges ayant déjà défilé depuis le début de l'excitation et distinguer deux cas : I est localement une fonction croissante, ou décroissante, du temps. III.B.4) Reprendre la question précédente pour t > tñn ; on pourra introduire deux entiers : N "... , valeur maximum de N 1 , et N 2 correspondant au nombre de franges ayant déjà: défilé depuis la fin de l'excitation. On distinguera deux cas : I est localement une fonction croissante, ou décroissante, du temps. IIÏ.B.5) Grâce aux expressions précédentes, on peut tracer la variation de l'épaisseur de la cavité en fonction du temps. Le tracé ci-contre (figure 12) donne le déplacement de la lame en fonction du temps. Déterminer graphiquement le déplacement maximal _ dmax de la lame au point M considéré. Quelle relation peut--on écrire entre dmax et -Aemax. Valider les expres-- sions précédentes de Ae en déterminant graphiquement grâce à la figure 11 une deuxième valeur de dmax . Cette méthode donne les variations d'épaisseur pour les différents points de la lame à différents instants. Il est alors possible de créer une animation de la défor- _mation. La figure 13 représente, à un instant donné, l'aspect de la déformation ' locale de la lame suite à une excita- tion ponctuelle et centrée. 400 800 1200 1800 2000 2400 Temps en millisecondes Figure 12 ': déplacement de la lame en fonction "du temps Figure 13 : déformation locale de la lame Partie IV - Méthode de décalagede phase « Phase Shifting » La méthode de « Phase Shifting » (PSI) est une méthode d'analyse et de traite- ment d'un nombre élevé de données, en l'occurrence ici, les images obtenues par le capteur de la caméra CCD. Il existe plusieurs systèmes de traitement, celui décrit ici est l'algorithme de Hariharan. On reprend l'expérience décrite au III.B, le but étant d'obtenir une mesure locale de la phase (x, y) d'interférence. Au cours de l'expérience cette phase varie lentement au cours du temps. La caméra CCD enregistre F interféro- grammes par seconde. Entre deux acquisitions succeSsives la phase varie donc de Ad) . La fréquence d'acquisition F étant assez élevée on peut considérer que, sur un court intervalle de temps, la phase varie linéairement dans le temps et donc que A' est constant sur une courte durée. IV.A- En supposant que la lame d'entrée L2 se déplace a la vitesse moyenne 0 , déterminer l'expression de ACI). Faire l'application numérique avec v : lum s 1 , F= 50Hz etk= 632nm. IV.B - Si on note a l'accélération de la lame, évaluer l'erreur relative que l'on commet en considérant A(I> constant entre deux acquisitions successives, on exprimera le résultat en fonction de a , v et F. Évaluer numériquement cette erreur relative dans le cas où le déplacement de la lame est régi par un système du premier ordre de constante de temps 17 : 400ms . Pour mesurer la phase à l'instant t l'algorithme de Hariharan, prend en compte les intensités mesurées aux instants t -- 2T , t --- T , t, t + T et t + 2T . On peut les noter : ' I 1»(x,y) = I_0(x,y)[l +V(x,y)COS(®(x,y)f 2A)l, Iz(an) = Io(x,y)[l + V(x,y)c08(®(x,y)--A®)l, I3(x,y) ; Io(x,y)[l +V(x,y)COS(OE(x,y))l, , I4(x, y) = Io(x,y)[l +V(x,y)COS(®(x,y)+/m)l, IS(x, y) : IO(x, y)[1 + V(x, y)cos(d>(x, y) + 2A)] . IV.C- Comment interpréter le fait que I() eSt une fonction des coordonnées du point de mesure. '7 Quelle est la signification du terme V(x, y) dans ces expressions. " IV.D- Exprimer, en fonction de MD le rapport IS(x,y)_ I 1(x:y) R : I4(x, y)-- --Iz(x,y) IV.E - Exprimer, en fonction de (x, y) et Ad) , le rapport Is(x, y)+I (x,y )-- 213,(x y) R2: I,(x y)-- I,(x, y) et donc de e(x, y) , IV.G - Quels sont les avantages du « Phase Shifting » par rapport aux méthodes de mesure du II.B et III.B ? À titre documentaire, une application de la méthode PSI est donnée ci-dessous (figure 14) : Figure 14 : méthode PSI ooo FIN ooo