
Mines Physique 1 PC 2008
| Thème de l'épreuve | Quelques oscillations |
| Principaux outils utilisés | mécanique du solide, électrocinétique |
| Mots clefs | oscillations, modes propres, analogie mécanique-électrocinétique, rail, sphère |
Corrigé
:👈 gratuite pour tous les corrigés si tu crées un compte
👈 l'accès aux indications de tous les corrigés ne coûte que 1 € ⬅ clique ici
👈 gratuite pour tous les corrigés si tu crées un compte
- - - - - - -
👈 gratuite pour ce corrigé si tu crées un compte
- - - - - - - - - - -
Énoncé complet
(télécharger le PDF)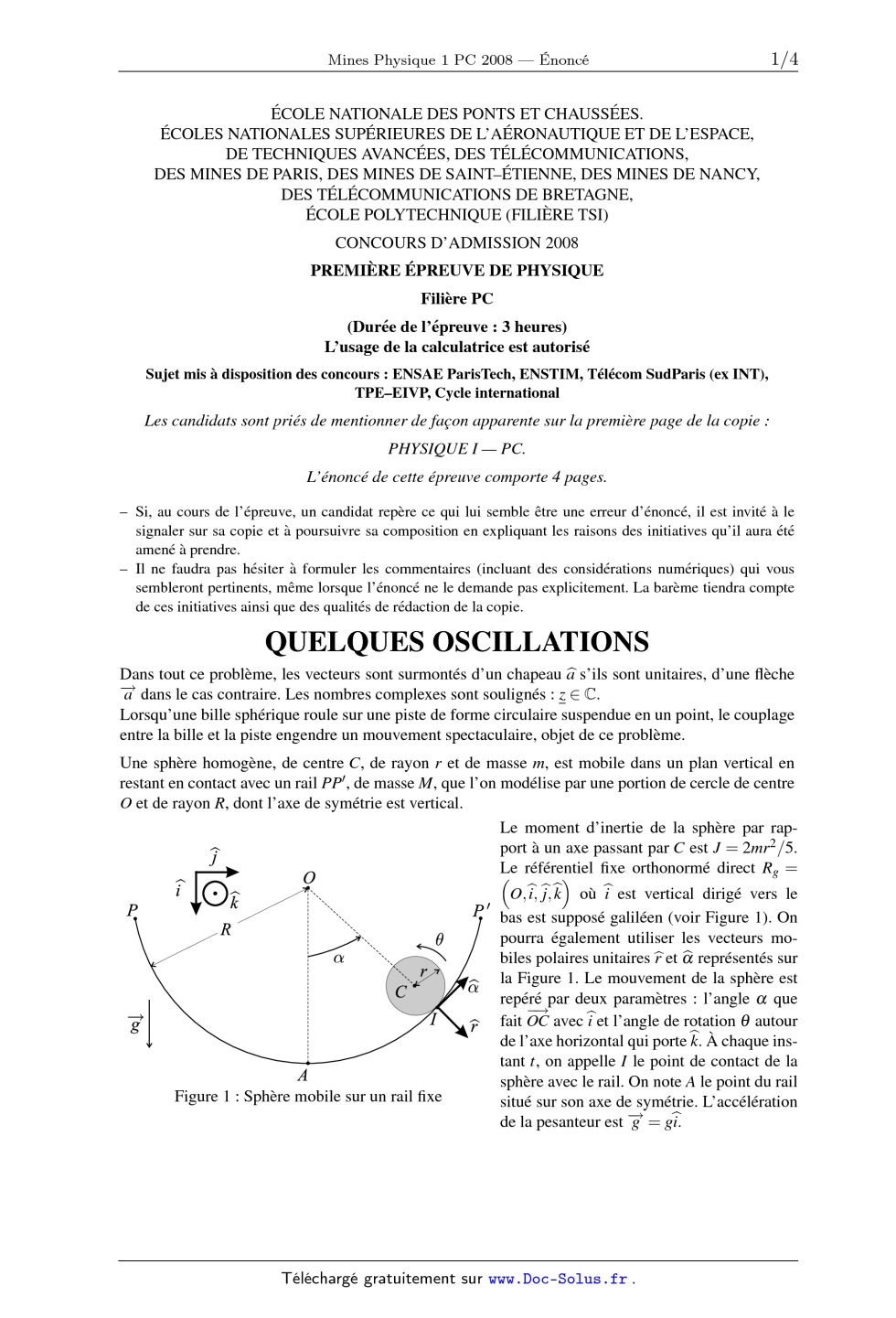

Rapport du jury
(télécharger le PDF)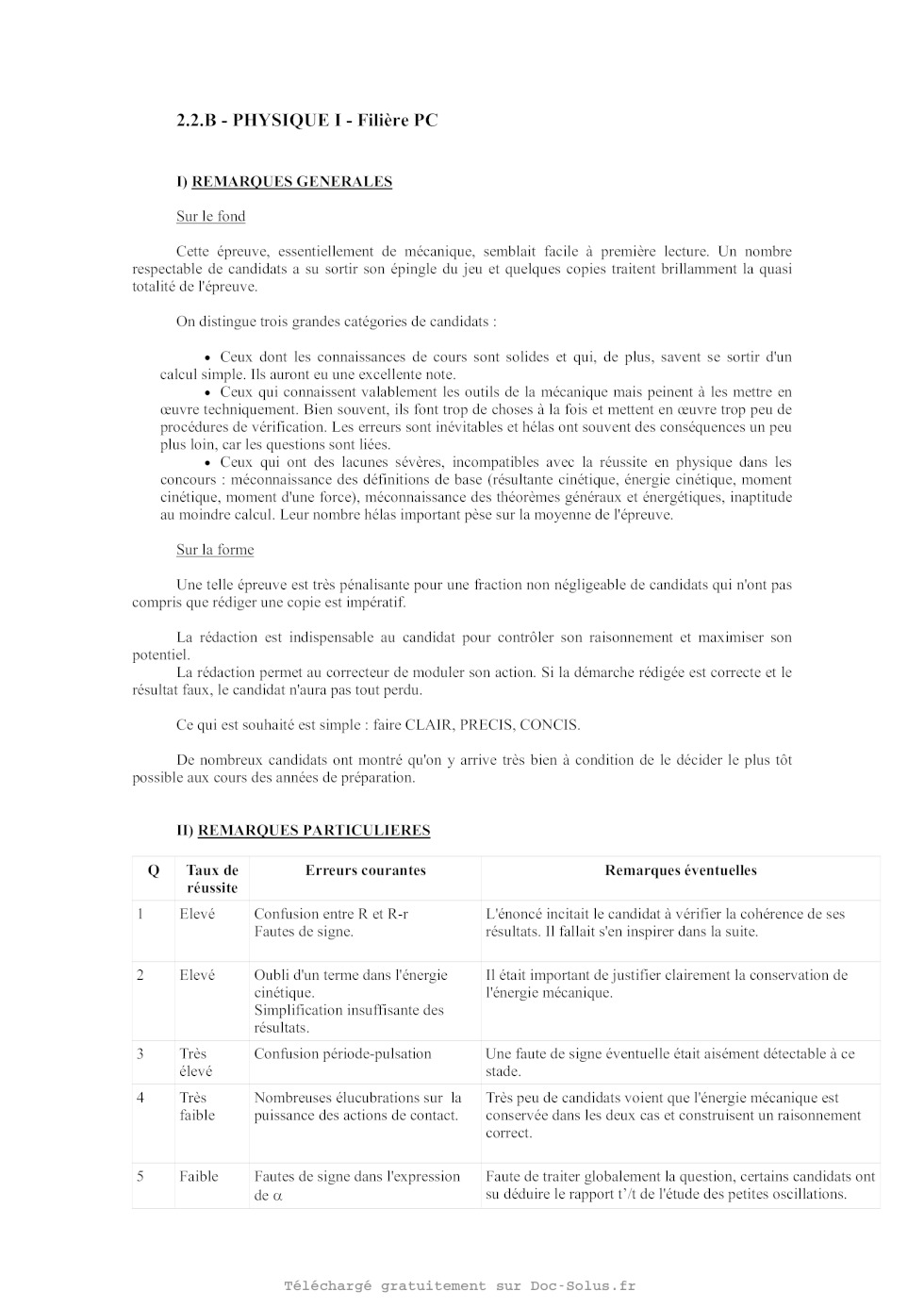
Énoncé obtenu par reconnaissance optique des caractères
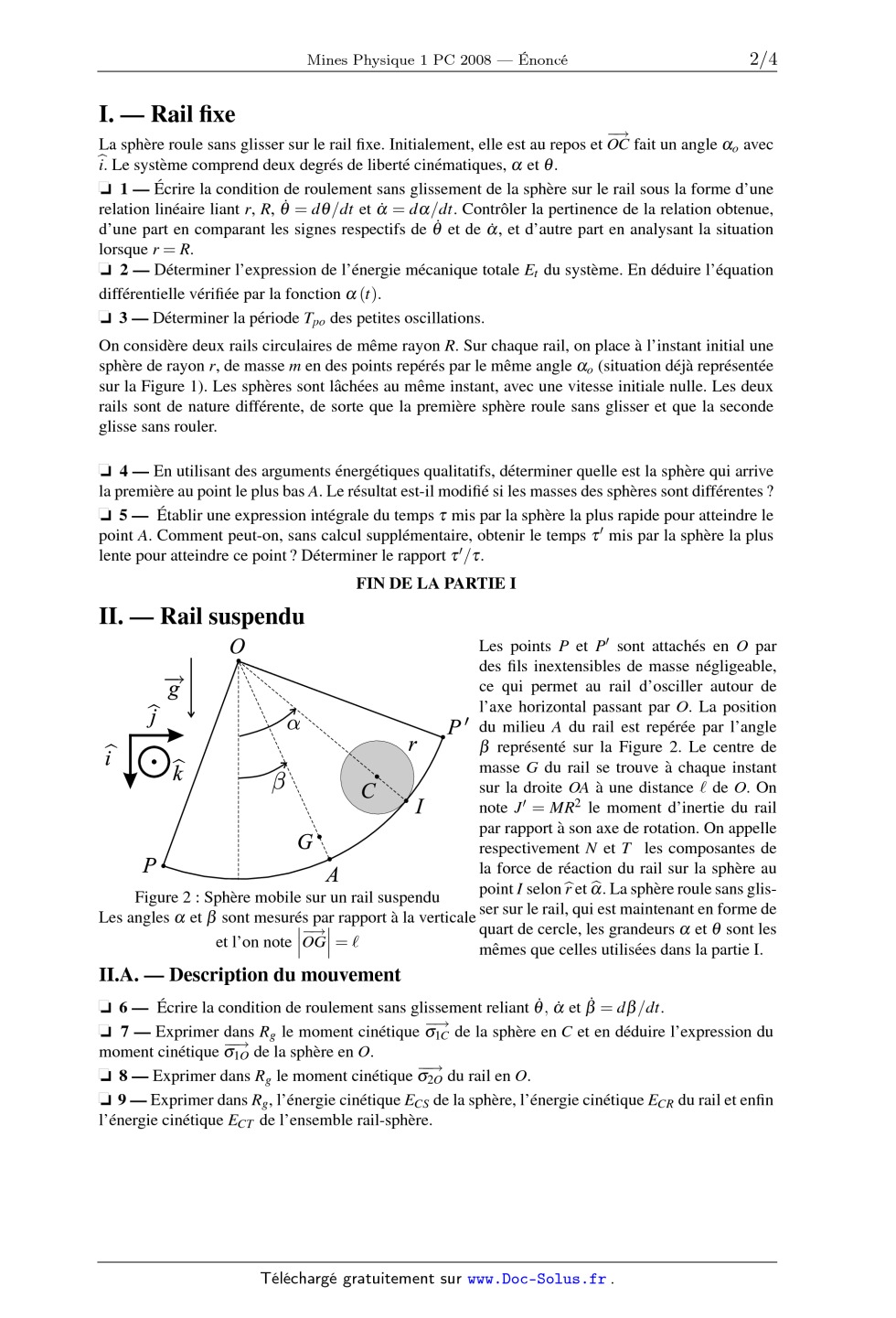
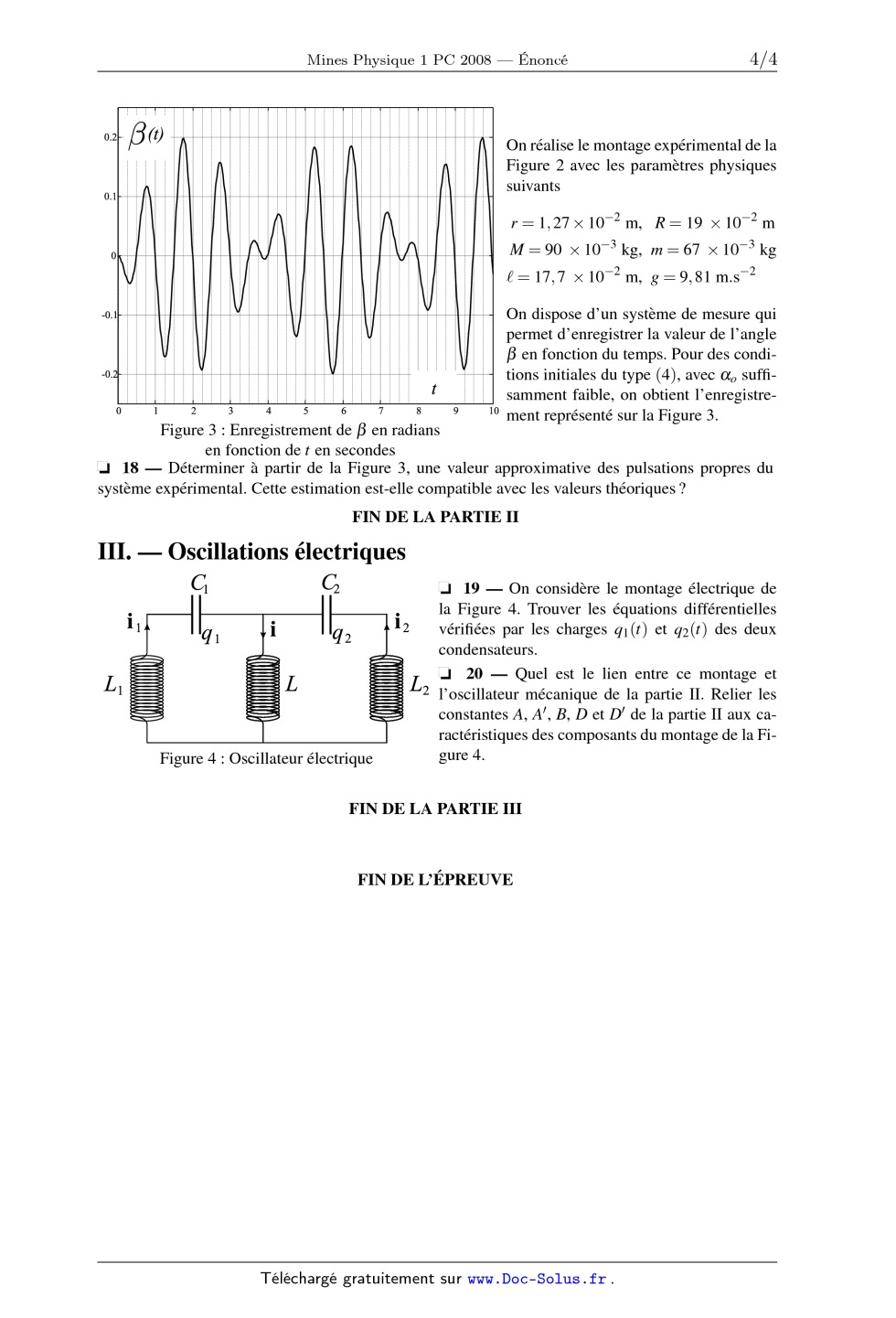
ECOLE NATIONALE DES PONTS ET CHAUSSEES. ECOLES NATIONALES SUPERIEURES DE L'AERONAUTIQUE ET DE L'ESPACE, DE TECHNIQUES AVANCEES, DES TELECOMMUNICATIONS, DES MINES DE PARIS, DES MINES DE SAINTETIENNE, DES MINES DE NANCY, DES TELECOMMUNICATIONS DE BRETAGNE, ECOLE POLYTECHNIQUE (FILIERE TSI) CONCOURS D'ADMISSION 2008 PREMIERE EPREUVE DE PHYSIQUE Filiere PC (Duree de l'epreuve : 3 heures) L'usage de la calculatrice est autorise Sujet mis a disposition des concours : ENSAE ParisTech, ENSTIM, Telecom SudParis (ex INT), TPEEIVP, Cycle international Les candidats sont pries de mentionner de facon apparente sur la premiere page de la copie : PHYSIQUE I -- PC. L'enonce de cette epreuve comporte 4 pages. Si, au cours de l'epreuve, un candidat repere ce qui lui semble etre une erreur d'enonce, il est invite a le signaler sur sa copie et a poursuivre sa composition en expliquant les raisons des initiatives qu'il aura ete amene a prendre. Il ne faudra pas hesiter a formuler les commentaires (incluant des considerations numeriques) qui vous sembleront pertinents, meme lorsque l'enonce ne le demande pas explicitement. La bareme tiendra compte de ces initiatives ainsi que des qualites de redaction de la copie. QUELQUES OSCILLATIONS Dans tout ce probleme, les vecteurs sont surmontes d'un chapeau ab s'ils sont unitaires, d'une fleche - a dans le cas contraire. Les nombres complexes sont soulignes : z C. Lorsqu'une bille spherique roule sur une piste de forme circulaire suspendue en un point, le couplage entre la bille et la piste engendre un mouvement spectaculaire, objet de ce probleme. Une sphere homogene, de centre C, de rayon r et de masse m, est mobile dans un plan vertical en restant en contact avec un rail PP , de masse M, que l'on modelise par une portion de cercle de centre O et de rayon R, dont l'axe de symetrie est vertical. Le moment d'inertie de la sphere par rapport a un axe passant par C est J = 2mr2 /5. Le fixe orthonorme direct Rg = referentiel O, bi, b j, b k ou bi est vertical dirige vers le Figure 1 : Sphere mobile sur un rail fixe bas est suppose galileen (voir Figure 1). On pourra egalement utiliser les vecteurs mob representes sur biles polaires unitaires b r et la Figure 1. Le mouvement de la sphere est repere par deux parametres : l'angle que - fait OC avec bi et l'angle de rotation autour de l'axe horizontal qui porte b k. A chaque instant t, on appelle I le point de contact de la sphere avec le rail. On note A le point du rail situe sur son axe de symetrie. L'acceleration - de la pesanteur est g = gbi. QUELQUES OSCILLATIONS I. -- Rail fixe - La sphere roule sans glisser sur le rail fixe. Initialement, elle est au repos et OC fait un angle o avec bi. Le systeme comprend deux degres de liberte cinematiques, et . 1 -- Ecrire la condition de roulement sans glissement de la sphere sur le rail sous la forme d'une relation lineaire liant r, R, = d /dt et = d /dt. Controler la pertinence de la relation obtenue, d'une part en comparant les signes respectifs de et de , et d'autre part en analysant la situation lorsque r = R. 2 -- Determiner l'expression de l'energie mecanique totale Et du systeme. En deduire l'equation differentielle verifiee par la fonction (t). 3 -- Determiner la periode Tpo des petites oscillations. On considere deux rails circulaires de meme rayon R. Sur chaque rail, on place a l'instant initial une sphere de rayon r, de masse m en des points reperes par le meme angle o (situation deja representee sur la Figure 1). Les spheres sont lachees au meme instant, avec une vitesse initiale nulle. Les deux rails sont de nature differente, de sorte que la premiere sphere roule sans glisser et que la seconde glisse sans rouler. 4 -- En utilisant des arguments energetiques qualitatifs, determiner quelle est la sphere qui arrive la premiere au point le plus bas A. Le resultat est-il modifie si les masses des spheres sont differentes ? 5 -- Etablir une expression integrale du temps mis par la sphere la plus rapide pour atteindre le point A. Comment peut-on, sans calcul supplementaire, obtenir le temps mis par la sphere la plus lente pour atteindre ce point ? Determiner le rapport / . FIN DE LA PARTIE I II. -- Rail suspendu Les points P et P sont attaches en O par des fils inextensibles de masse negligeable, ce qui permet au rail d'osciller autour de l'axe horizontal passant par O. La position du milieu A du rail est reperee par l'angle represente sur la Figure 2. Le centre de masse G du rail se trouve a chaque instant sur la droite OA a une distance de O. On note J = MR2 le moment d'inertie du rail par rapport a son axe de rotation. On appelle respectivement N et T les composantes de la force de reaction du rail sur la sphere au b . La sphere roule sans glispoint I selon b r et Figure 2 : Sphere mobile sur un rail suspendu ser sur le rail, qui est maintenant en forme de Les angles et sont mesures par rapport a la verticale quart de cercle, les grandeurs et sont les - et l'on note OG = memes que celles utilisees dans la partie I. II.A. -- Description du mouvement 6 -- Ecrire la condition de roulement sans glissement reliant , et = d /dt. - de la sphere en C et en deduire l'expression du 7 -- Exprimer dans Rg le moment cinetique 1C -- de la sphere en O. moment cinetique 1O -- du rail en O. 8 -- Exprimer dans Rg le moment cinetique 2O 9 -- Exprimer dans Rg , l'energie cinetique ECS de la sphere, l'energie cinetique ECR du rail et enfin l'energie cinetique ECT de l'ensemble rail-sphere. Page 2/4 Physique I, annee 2008 -- filiere MP 10 -- Appliquer le theoreme du moment cinetique en O a l'ensemble rail-sphere et en deduire une equation differentielle liant les fonctions (t) et (t). 11 -- Appliquer le theoreme du moment cinetique en C a la sphere seule et en deduire l'expression de T en fonction de = d 2 /dt 2 , puis, en utilisant le resultat de la question 6, en fonction de = d 2 /dt 2 et = d 2 /dt 2 . 12 -- Appliquer le theoreme du moment cinetique en O au rail seul et en deduire la relation differentielle A d2 d2 - B = -Mg sin dt 2 dt 2 (1) On exprimera la constante A en fonction de M, m et R et la constante B en fonction de m, r et R 13 -- Deduire des resultats precedents la relation A d2 d2 - B = -mg (R - r) sin dt 2 dt 2 (2) On exprimera la constante A en fonction de m, r et R. Verifier que l'equation (2) est en accord avec le resultat de la question 2. 14 -- Retrouvez les equations (1) et (2) a partir de considerations energetiques. Demontrer que AA > B2 . 15 -- Que traduit l'absence de termes en et dans les equations (1) et (2) ? II.B. -- Modes d'oscillation On considere dans cette sous-partie que les angles et sont l'un et l'autre voisins de zero, ce qui permet de lineariser les equations (1) et (2). On pose D = Mg et D = mg (R - r). On cherche les solutions du systeme linearise sous la forme (t) = Re o e i t i t et (t) = Re o e (3) ou o et o sont deux nombres complexes, i2 = -1. On appelle pulsation propre du systeme tout reel positif qui permet d'obtenir des solutions non nulles du systeme linearise sous la forme (3). 16 -- Determiner les pulsations propres 1 et 2 du systeme (1 > 2 ) en fonction de A, A , B, D et D . On considere dorenavant que les conditions initiales du systeme sont (t = 0) = o et (t = 0) = (t = 0) = (t = 0) = 0 (4) 17 -- Montrer que si o 6= 0, la solution du systeme linearise est une fonction de la forme (t) = [cos (1t) - cos (2t)]. On ne cherchera pas forcement a determiner la constante en fonction des parametres du systeme. Page 3/4 Tournez la page S.V.P. QUELQUES OSCILLATIONS On realise le montage experimental de la Figure 2 avec les parametres physiques suivants r = 1, 27 × 10-2 m, R = 19 × 10-2 m M = 90 × 10-3 kg, m = 67 × 10-3 kg = 17, 7 × 10-2 m, g = 9, 81 m.s-2 On dispose d'un systeme de mesure qui permet d'enregistrer la valeur de l'angle en fonction du temps. Pour des conditions initiales du type (4), avec o suffisamment faible, on obtient l'enregistrement represente sur la Figure 3. Figure 3 : Enregistrement de en radians en fonction de t en secondes 18 -- Determiner a partir de la Figure 3, une valeur approximative des pulsations propres du systeme experimental. Cette estimation est-elle compatible avec les valeurs theoriques ? FIN DE LA PARTIE II III. -- Oscillations electriques Figure 4 : Oscillateur electrique 19 -- On considere le montage electrique de la Figure 4. Trouver les equations differentielles verifiees par les charges q1 (t) et q2 (t) des deux condensateurs. 20 -- Quel est le lien entre ce montage et l'oscillateur mecanique de la partie II. Relier les constantes A, A , B, D et D de la partie II aux caracteristiques des composants du montage de la Figure 4. FIN DE LA PARTIE III FIN DE L'EPREUVE Page 4/4