
X Physique 1 PC 2007
| Thème de l'épreuve | Analyse d'un mouvement « collé-glissé » (stick-slip) et de l'une de ses conséquences, le chant des verres |
| Principaux outils utilisés | mécanique générale, portraits de phase, lois de Coulomb |
| Mots clefs | frottement solide, collé-glissé, chant des verres, oscillation entretenue |
Corrigé
:👈 gratuite pour tous les corrigés si tu crées un compte
👈 l'accès aux indications de tous les corrigés ne coûte que 1 € ⬅ clique ici
👈 gratuite pour tous les corrigés si tu crées un compte
- - - - - - - - - - - - - - - - - - -
👈 gratuite pour ce corrigé si tu crées un compte
- - - - - - -
Énoncé complet
(télécharger le PDF)


Énoncé obtenu par reconnaissance optique des caractères
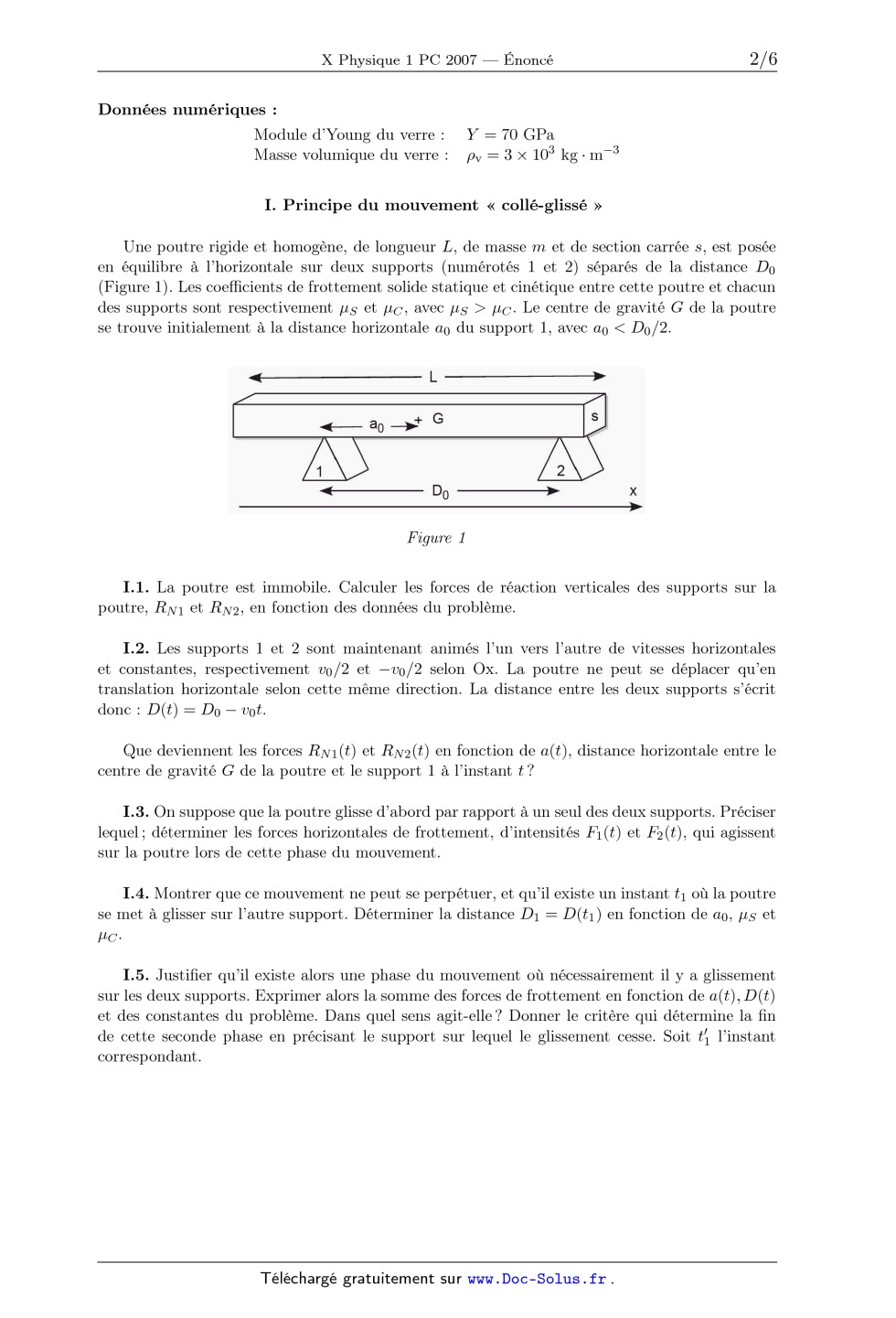
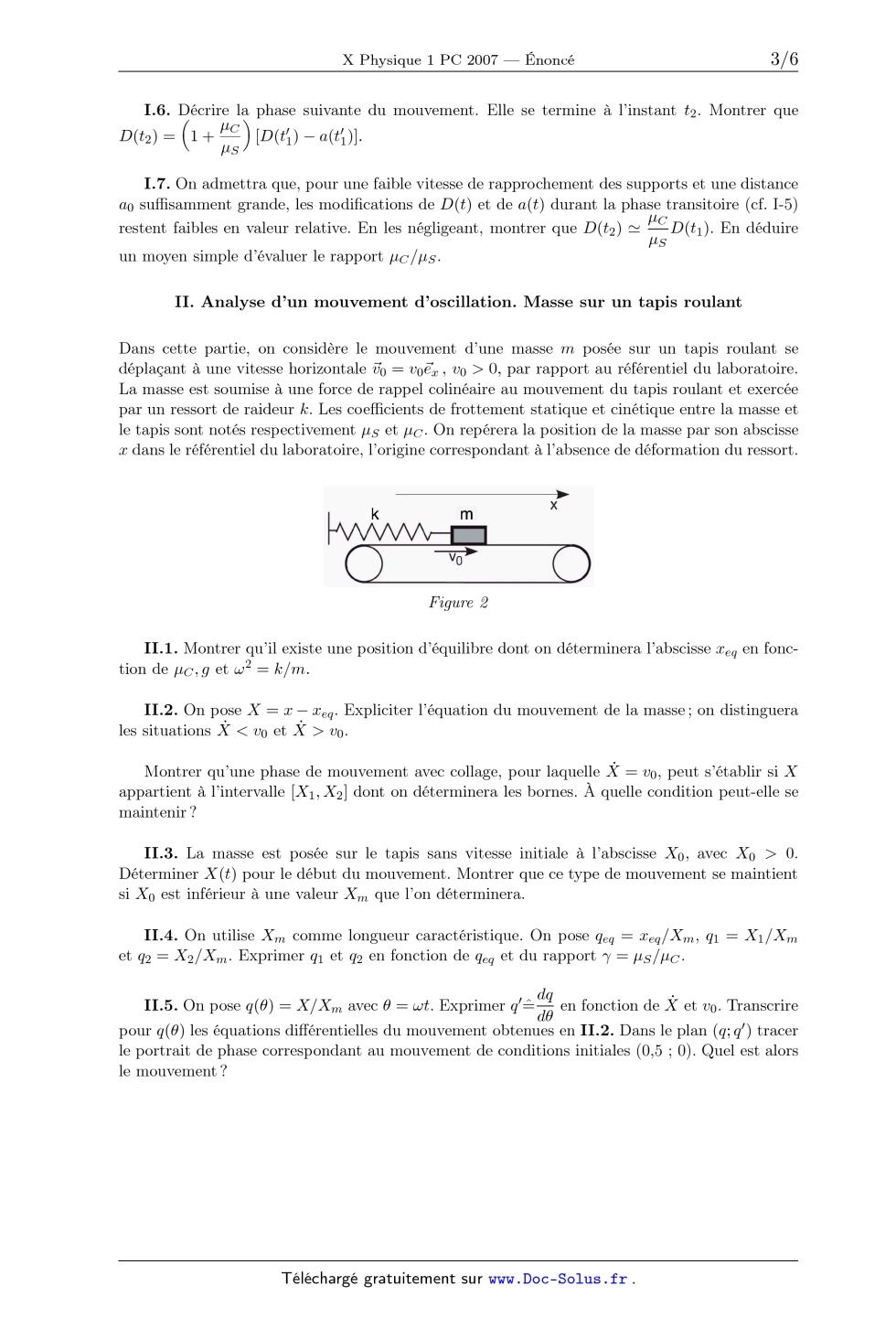
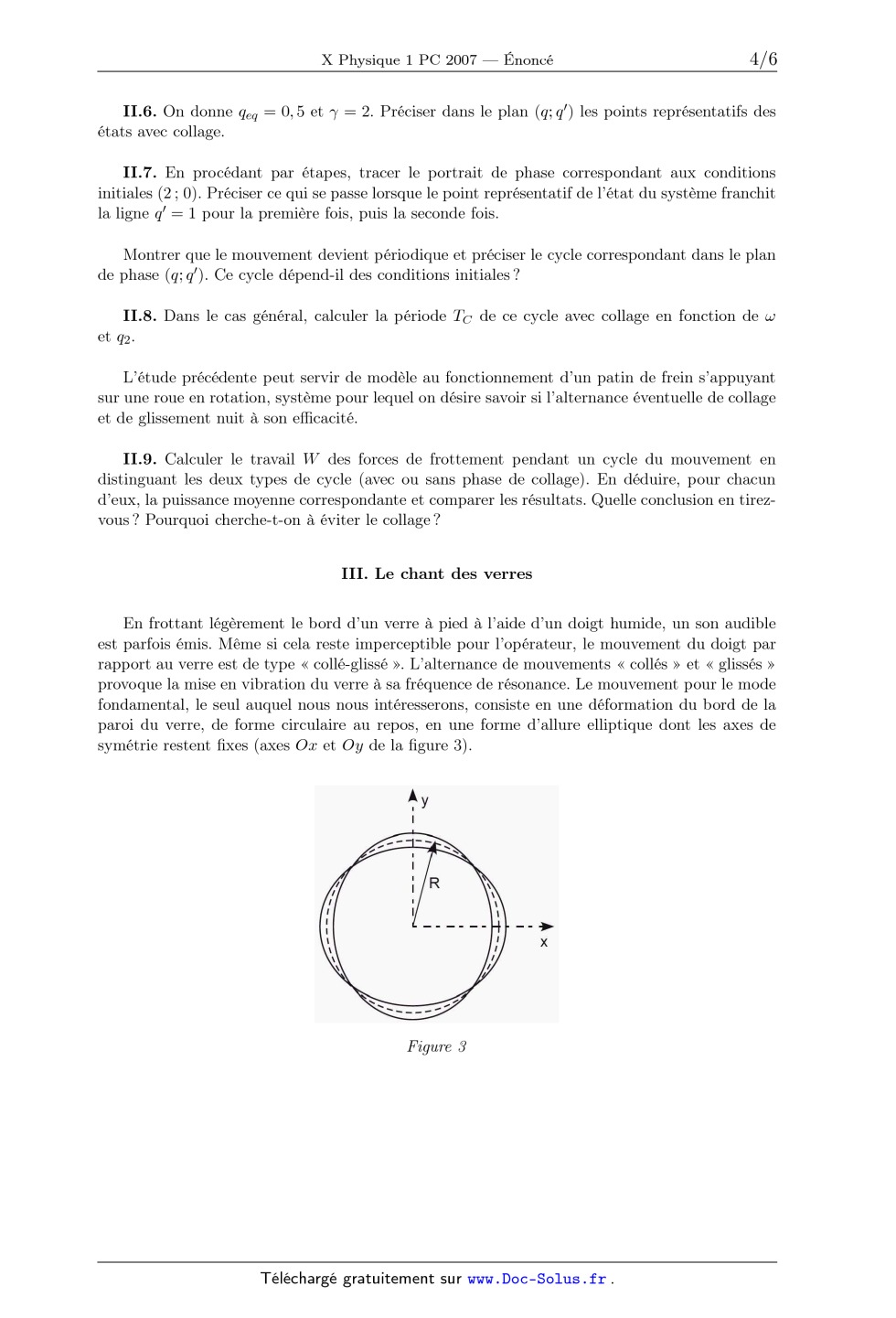
ECOLE POLYTECHNIQUE ÉCOLE SUPÉRIEURE DE PHYSIQUE ET CHIMIE INDUSTRIELLES CONCOURS D'ADMISSION 2007 FILIÈRE PC PREMIÈRE COMPOSITION DE PHYSIQUE (Durée : 4 heures) L'utilisation des calculatrices est autorisée pour cette épreuve. *** Analyse d'un mouvement << collé-glissé >> (stick-slip) et l'une de ses conséquences, le chant des verres Le frottement solide joue un rôle considérable dans de nombreuses situations, statiques ou dyna-- miques. Nous allons analyser ici quelques aspects du mouvement d'un solide qui peut soit glisser (<< slip >>) soit adhérer (<< stick >>) sur son support. Ce phénomène a pour origine le fait que les coefficients de frottement statique et cinétique différent. Il est ainsi responsable du grincement des portes, du crissement des craies sur le tableau noir, ou dans un registre plus harmonieux, de la mise en vibration d'une corde de violon. Un tel type de mouvement est étudié dans les parties 1 et 2, et dans la partie 3 nous nous intéresserons a un phénomène de vibration qui trouve aussi son origine dans le mouvement << collé--glissé >> : le chant des verres. Les parties 1, 2 et 3 sont indépendantes. Dans tout le problème on désigne par a. la norme de tout vecteur d', et par d: la dérivée de a:(t) par rapport au temps. Définitions et rappels : . Lois du frottement solide / solide (lois de Coulomb) : f et ]\_f étant respectivement les com-- posantes tangentielle et normale de l'action de contact exercée par un solide sur un autre, ,LL5 et ac les coefficients de frottement << statique >> et << cinétique >> avec ,LL5 > ,Lbc, -- si la vitesse de glissement est nulle, alors H fll < ,LL5HN' H -- si la vitesse de glissement est non nulle, alors f est de sens opposé a cette vitesse et de module llfll = ucllNll . Relation entre la déformation (allongement ou contraction relatif) 5l/l d'une tige solide et la contrainte normale (force de traction ou de compression longitudinale par unité de surface de section) F/ S : ÿ_1E _ S l Y , Y désignant le module d'Young . Données numériques : Module d'Young du verre : Y = 70 GPa Masse volumique du verre : pv : 3 >< 103 kg - m--3 I. Principe du mouvement « collé--glissé » Une poutre rigide et homogène, de longueur L, de masse m et de section carrée s, est posée en équilibre a l'horizontale sur deux supports (numérotés 1 et 2) séparés de la distance DO (Figure 1). Les coefficients de frottement solide statique et cinétique entre cette poutre et chacun des supports sont respectivement ,uS et ,uç, avec pas > ,uc. Le centre de gravité G de la poutre se trouve initialement a la distance horizontale ao du support 1, avec ao < DO / 2. < L > $ 4---- a0 -->+ G : Do > X Figure ] L1. La poutre est immobile. Calculer les forces de réaction verticales des supports sur la poutre, RN1 et RN2, en fonction des données du problème. I.2. Les supports 1 et 2 sont maintenant animés l'un vers l'autre de vitesses horizontales et constantes, respectivement @@ / 2 et --vO / 2 selon Ox. La poutre ne peut se déplacer qu'en translation horizontale selon cette même direction. La distance entre les deux supports s'écrit donc : D(É) = DO -- Dot. Que deviennent les forces RN1(t) et RN2(t) en fonction de a(t), distance horizontale entre le centre de gravité G de la poutre et le support 1 a l'instant t ? I.3. On suppose que la poutre glisse d'abord par rapport a un seul des deux supports. Préciser lequel, déterminer les forces horizontales de frottement, d'intensités F1(t) et F2(É), qui agissent sur la poutre lors de cette phase du mouvement. 1.4. Montrer que ce mouvement ne peut se perpétuer, et qu'il existe un instant 151 où la poutre se met a glisser sur l'autre support. Déterminer la distance D1 : D(t1) en fonction de CLO, ,uS et Mc. I.5. Justifier qu'il existe alors une phase du mouvement où nécessairement il y a glissement sur les deux supports. Exprimer alors la somme des forces de frottement en fonction de a(t), D(t) et des constantes du problème. Dans quel sens agit-elle? Donner le critère qui détermine la fin de cette seconde phase en précisant le support sur lequel le glissement cesse. Soit t'1 l'instant correspondant. 1.6. Décrire la phase suivante du mouvement. Elle se termine a l'instant 152. Montrer que NC D<æ> = (1 + --) [D-- a(tâ)l-- HS 1.7. On admettra que) pour une faible vitesse de rapprochement des supports et une distance @@ suffisamment grande7 les modifications de D(t) et de a(t) durant la phase transitoire (cf. 1--5) restent faibles en valeur relative. En les négligeant, montrer que D(t2) : "'--CD(t1). En déduire Ms un moyen simple d'évaluer le rapport ,uC/u5. II. Analyse d'un mouvement d'osci11ation. Masse sur un tapis roulant Dans cette partie) on considère le mouvement d'une masse m posée sur un tapis roulant se déplaçant a une vitesse horizontale 170 : voë'oe , @@ > 0, par rapport au référentiel du laboratoire. La masse est soumise a une force de rappel colinéaire au mouvement du tapis roulant et exercée par un ressort de raideur [EUR. Les coefficients de frottement statique et cinétique entre la masse et le tapis sont notés respectivement ,uS et ,uC. On repérera la position de la masse par son abscisse a: dans le référentiel du laboratoire, l'origine correspondant a l'absence de déformation du ressort. "v F igure 2 11.1. Montrer qu'il existe une position d'équilibre dont on déterminera l'abscisse a:eq en fonc-- tion de ,uC,g et w2 : k/m. II.2. On pose X = a: -- a:eq. Expliciter l'équation du mouvement de la masse; on distinguera les situations X < vo et X > vo. Montrer qu'une phase de mouvement avec collage7 pour laquelle X : @... peut s'établir si X appartient a l'intervalle [X1, X2] dont on déterminera les bornes. À quelle condition peut--elle se maintenir ? 11.3. La masse est posée sur le tapis sans vitesse initiale a l'abscisse XO, avec XO > 0. Déterminer X (t) pour le début du mouvement. Montrer que ce type de mouvement se maintient si X0 est inférieur a une valeur Xm que l'on déterminera. II.4. On utilise Xm comme longueur caractéristique On pose qeq : greg/X..., q1 : X1/Xm et (12 : Xg/X.... Exprimer (11 et (12 en fonction de qeq et du rapport y : pts/Nc. d . II.5. On pose q(9) : X/Xm avec 9 : cat. Exprimer q'£d--g en fonction de X et oO. Transcrire pour q(9) les équations différentielles du mouvement obtenues en II.2. Dans le plan (q; q' ) tracer le portrait de phase correspondant au mouvement de conditions initiales (0,5 ; 0). Quel est alors le mouvement ? II.6. On donne qeq : 0,5 et y = 2. Préciser dans le plan (q; q' ) les points représentatifs des états avec collage. II.7 . En procédant par étapes, tracer le portrait de phase correspondant aux conditions initiales (2 , 0). Préciser ce qui se passe lorsque le point représentatif de l'état du système franchit la ligne q' = 1 pour la première fois, puis la seconde fois. Montrer que le mouvement devient périodique et préciser le cycle correspondant dans le plan de phase (q; q' ) Ce cycle dépend--il des conditions initiales ? II.8. Dans le cas général, calculer la période To de ce cycle avec collage en fonction de w et (12. L'étude précédente peut servir de modèle au fonctionnement d'un patin de frein s'appuyant sur une roue en rotation, système pour lequel on désire savoir si l'alternance éventuelle de collage et de glissement nuit a son efficacité. II.9. Calculer le travail W des forces de frottement pendant un cycle du mouvement en distinguant les deux types de cycle (avec ou sans phase de collage). En déduire, pour chacun d'eux, la puissance moyenne correspondante et comparer les résultats. Quelle conclusion en tirez-- vous ? Pourquoi cherche--t--on a éviter le collage ? III. Le chant des verres En frottant légèrement le bord d'un verre a pied a l'aide d'un doigt humide, un son audible est parfois émis. Même si cela reste imperceptible pour l'opérateur, le mouvement du doigt par rapport au verre est de type << collé--glissé >>. L'alternance de mouvements << collés >> et << glissés >> provoque la mise en vibration du verre a sa fréquence de résonance. Le mouvement pour le mode fondamental, le seul auquel nous nous intéresserons, consiste en une déformation du bord de la paroi du verre, de forme circulaire au repos, en une forme d'allure elliptique dont les axes de symétrie restent fixes (axes 0913 et Oy de la figure 3). F igure 3 Les déformations géométriques d'un verre étant en réalité fort complexes, il ne sera effectué ici qu'une première approche en étudiant les oscillations libres d'un système plus simple, un tube cylindrique. La modélisation est donc celle d'un cylindre de révolution d'axe zz' , de rayon R et de hauteur H. L'épaisseur de la paroi est a avec 0. << R. La déformation est supposée plane, orthogonale a l'axe, et indépendante de z (déformation cylindrique) , sa composante radiale, en coordonnées cylindriques (T, 9, z) est supposée de la forme : 5r(9,t) : 50 cos 29 cos wt avec 50 << R . III.1. Analyse énergétique de la vibration III.1.1 Justifier que l'expression de 5r(9,t) permet de décrire correctement l'allure géomé-- trique de la déformation représentée en figure 3. III.1.2 Soit 5(t) le déplacement d'un point du bord du verre situé a un ventre de vibration (sur l'axe 0:13 par exemple), ce déplacement est radial. Si l'on suppose que les déformations restent dans le domaine élastique, justifier que l'énergie mécanique E d'un tel système peut dé 2 s'écrire @ priori sous la forme E = A (--) + B52 où A et B sont deux constantes que l'on ne dt cherchera pas pour l'instant a expliciter. III.1.3 Que vaut alors la fréquence propre au du mode en fonction de A et B si l'on suppose qu'il n'y a pas d'amortissement ? III.2. Énergie cinétique du tube cylindrique III.2.1 Écrire la masse dm d'un élément de la paroi du tube situé entre 9 et 9 + d9. On désignera par pu la masse volumique du verre. III.2.2 Donner l'expression de la vitesse radiale instantanée du point de coordonnées au repos (R, 9). III.2.3 La déformation étudiée s'effectue sans modification du périmètre de la section du tube (bord du verre). De ce fait, un point situé en dehors des axes 0:17 et Oy subira également un léger déplacement tangentiel, soit 3(9, t) pour un point de coordonnées au repos (R, 9), avec ls(9,t)l << R. On admettra sans démonstration que, compte tenu des hypothèses, la condition ds 9,15 de conservation du périmètre peut s'écrire ( ) + 5r(9, t) = 0. d9 Donner l'expression de ce déplacement tangentiel et la vitesse correspondante. III.2.4 Calculer alors l'énergie cinétique totale EC du tube a l'instant t. III.3. Analyse énergétique de la vibration. Énergie potentielle élastique III.3.1 Considérons une petite portion de la paroi du tube de hauteur ôz (52 << R) et de longueur lg au centre de la paroi, formant un segment d'anneau (figure 4). l'.../'" F igurc 4 Donner la longueur d'un << filament >> d'épaisseur du situé a la distance u de la ligne centrale de cet élément en fonction du rayon de courbure au repos R de cette ligne. Lors de la déformation, ce rayon de courbure passe de R a R' . Montrer que le changement 1 1 de longueur du filament est donné par (% : lg u (Ë -- Ê> . III.3.2 En supposant la déformation homogène, exprimer la force de tension (ou de compres-- sion) 5F le long de ce filament (du, 5.2) en fonction du module d'Young Y du matériau. III.3.3 Compte tenu de l'hypothèse ôg << R, calculer l'énergie potentielle élastique associée a ce filament, puis celle associée au segment d'anneau de longueur lg et d'épaisseur &. III.3.4 La déformation de l'anneau dépend en fait de 9. On admettra que la courbure (inverse du rayon de courbure) d'une portion élémentaire de l'anneau (située entre 9 et 9 + d9, donc pour 1 1 57" 57" lequel lg : Rd9) qui a subi un déplacement radial 5r(9, 15) (<< R) est donné par ? : Ë_% 257" où 57""£--2. En utilisant le résultat de la question précédente, exprimer l'énergie potentielle élastique de l'anneau de hauteur 5.2. 111.4. Fréquence de vibration du tube Pour passer de l'anneau de hauteur ôz au tube complet, il faut tenir compte des contraintes latérales internes qui font que le tube ne se décompose pas en éléments << anneaux >> indépendants. Mais dans cette géométrie de déformation particulière, on montre que l'on peut procéder comme s'ils l'étaient, a condition de multiplier le résultat par le facteur (1 -- 02)_1 où a est un coefficient caractéristique du matériau. Ondonne:R=3cm,H=5cm,a=1,4mm,0=0,2. Calculer la fréquence du mode de vibration étudié.