
CCINP Modélisation et Ingénierie numérique PSI 2016
| Thème de l'épreuve | Suspension magnétorhéologique |
| Principaux outils utilisés | sciences de l'ingénieur, mécanique des fluides, magnétostatique |
| Mots clefs | suspension, magnétorhéologie, asservissement, amortisseur, identification de paramètres |
Corrigé
:👈 gratuite pour tous les corrigés si tu crées un compte
👈 l'accès aux indications de tous les corrigés ne coûte que 1 € ⬅ clique ici
👈 gratuite pour tous les corrigés si tu crées un compte
- - - - - - - - - - - - - - - - - - -
👈 gratuite pour ce corrigé si tu crées un compte
- - - - - - - - - - - - - - - - - - - - - - - -
Énoncé complet
(télécharger le PDF)



Rapport du jury
(télécharger le PDF)
Énoncé obtenu par reconnaissance optique des caractères
SESSION 2016
PSIMI06
!
!
!
EPREUVE SPECIFIQUE - FILIERE PSI!
!!!!!!!!!!!!!!!!!!!!"
!
MODELISATION ET INGENIERIE NUMERIQUE
Jeudi 5 mai : 8 h - 12 h!
!!!!!!!!!!!!!!!!!!!!"
N.B. : le candidat attachera la plus grande importance à la clarté, à la
précision et à la concision de
la rédaction. Si un candidat est amené à repérer ce qui peut lui sembler être
une erreur d'énoncé, il le
signalera sur sa copie et devra poursuivre sa composition en expliquant les
raisons des initiatives
qu'il a été amené à prendre.!
!
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!"
!
!
!
!
!
!
Les calculatrices sont interdites
!
! Le sujet comporte 19 pages de texte de présentation et énoncé du sujet.
! Le sujet est composé d'une mise en situation et de 3 parties, indépendantes.
!
Toute documentation autre que celle fournie est interdite.
!
!
!
!
REMARQUES PRÉLIMINAIRES
!
!
!
!
! Il est conseillé d'utiliser des feuilles de papier brouillon afin de mettre
au point les développements
! mathématiques, schémas, graphes et courbes, avant de les recopier au propre
sur la copie.
!
! Il est demandé au candidat de bien vouloir inscrire les résultats et les
développements nécessaires aux
! différentes questions sur sa copie, en précisant bien le numéro de la
question traitée et, si possible,
! dans l'ordre des questions. Les résultats attendus seront obligatoirement
encadrés.
! Même s'il est conseillé de traiter les parties dans l'ordre du sujet pour
comprendre la logique d'enchaî! nement des questions, le candidat pourra, s'il
le souhaite, tirer profit de l'indépendance des parties.
! Chaque partie possède ses propres notations.
!
1/19
!
Suspension magnétorhéologique
I
Mise en situation
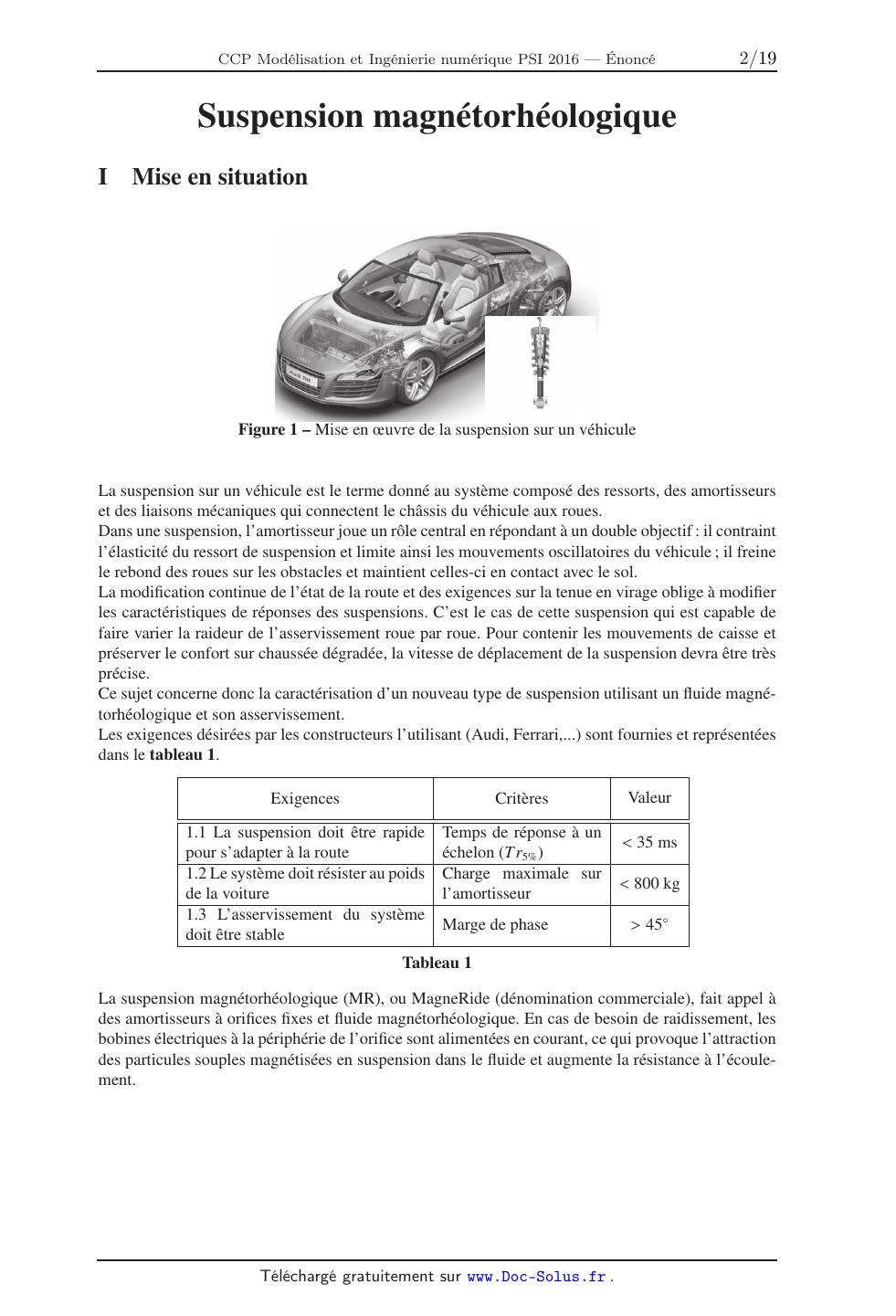
Figure 1 Mise en oeuvre de la suspension sur un véhicule
La suspension sur un véhicule est le terme donné au système composé des
ressorts, des amortisseurs
et des liaisons mécaniques qui connectent le châssis du véhicule aux roues.
Dans une suspension, l'amortisseur joue un rôle central en répondant à un
double objectif : il contraint
l'élasticité du ressort de suspension et limite ainsi les mouvements
oscillatoires du véhicule ; il freine
le rebond des roues sur les obstacles et maintient celles-ci en contact avec le
sol.
La modification continue de l'état de la route et des exigences sur la tenue en
virage oblige à modifier
les caractéristiques de réponses des suspensions. C'est le cas de cette
suspension qui est capable de
faire varier la raideur de l'asservissement roue par roue. Pour contenir les
mouvements de caisse et
préserver le confort sur chaussée dégradée, la vitesse de déplacement de la
suspension devra être très
précise.
Ce sujet concerne donc la caractérisation d'un nouveau type de suspension
utilisant un fluide magnétorhéologique et son asservissement.
Les exigences désirées par les constructeurs l'utilisant (Audi, Ferrari,...)
sont fournies et représentées
dans le tableau 1.
Exigences
Critères
1.1 La suspension doit être rapide
pour s'adapter à la route
1.2 Le système doit résister au poids
de la voiture
1.3 L'asservissement du système
doit être stable
Temps de réponse à un
échelon (T r5% )
Charge maximale sur
l'amortisseur
Marge de phase
Valeur
< 35 ms < 800 kg > 45
Tableau 1
La suspension magnétorhéologique (MR), ou MagneRide (dénomination commerciale),
fait appel à
des amortisseurs à orifices fixes et fluide magnétorhéologique. En cas de
besoin de raidissement, les
bobines électriques à la périphérie de l'orifice sont alimentées en courant, ce
qui provoque l'attraction
des particules souples magnétisées en suspension dans le fluide et augmente la
résistance à l'écoulement.
2/19
Pour caractériser les paramètres de cette suspension, une suspension MR de
taille réduite sera montée
sur un banc d'essai et sollicitée.
Tout d'abord, il faut identifier les paramètres importants de ce type
d'amortisseur. Une modélisation
de cet amortisseur sur un véhicule est réalisée dans la première partie. La
deuxième partie porte sur
l'étude d'une suspension réduite utilisée pour l'expérimentation. Cette partie
étudie une modélisation
de l'écoulement du fluide dans l'amortisseur, puis une modélisation de
l'influence du caractère ferromagnétique du fluide et enfin une modélisation du
circuit magnétique et du circuit électrique de
l'amortisseur. Dans la dernière partie, une expérimentation sur le quart d'un
véhicule réel est réalisée.
Ce système est soumis à des sollicitations sinusoïdales. Cette partie comporte
une identification de
l'amortisseur pour des sollicitations sinusoïdales puis la caractérisation du
correcteur afin de valider
le critère de stabilité de la suspension.
II
Caractérisation et modélisation de l'amortisseur
L'étude effectuée dans cette partie repose sur un modèle de quart de véhicule
simplifié qui sera expérimenté dans la suite. Ce modèle permet de saisir le
comportement vertical de l'ensemble caisse-rouepneu. Il est constitué d'une
masse suspendue (caisse) qui repose, par l'intermédiaire de la suspension,
sur la masse non suspendue (roue) qui repose elle-même sur le sol par
l'intermédiaire du pneumatique. La masse suspendue représente le quart de la
masse de la caisse du véhicule. La suspension
proprement dite est représentée par un ressort monté en parallèle avec un
amortisseur.
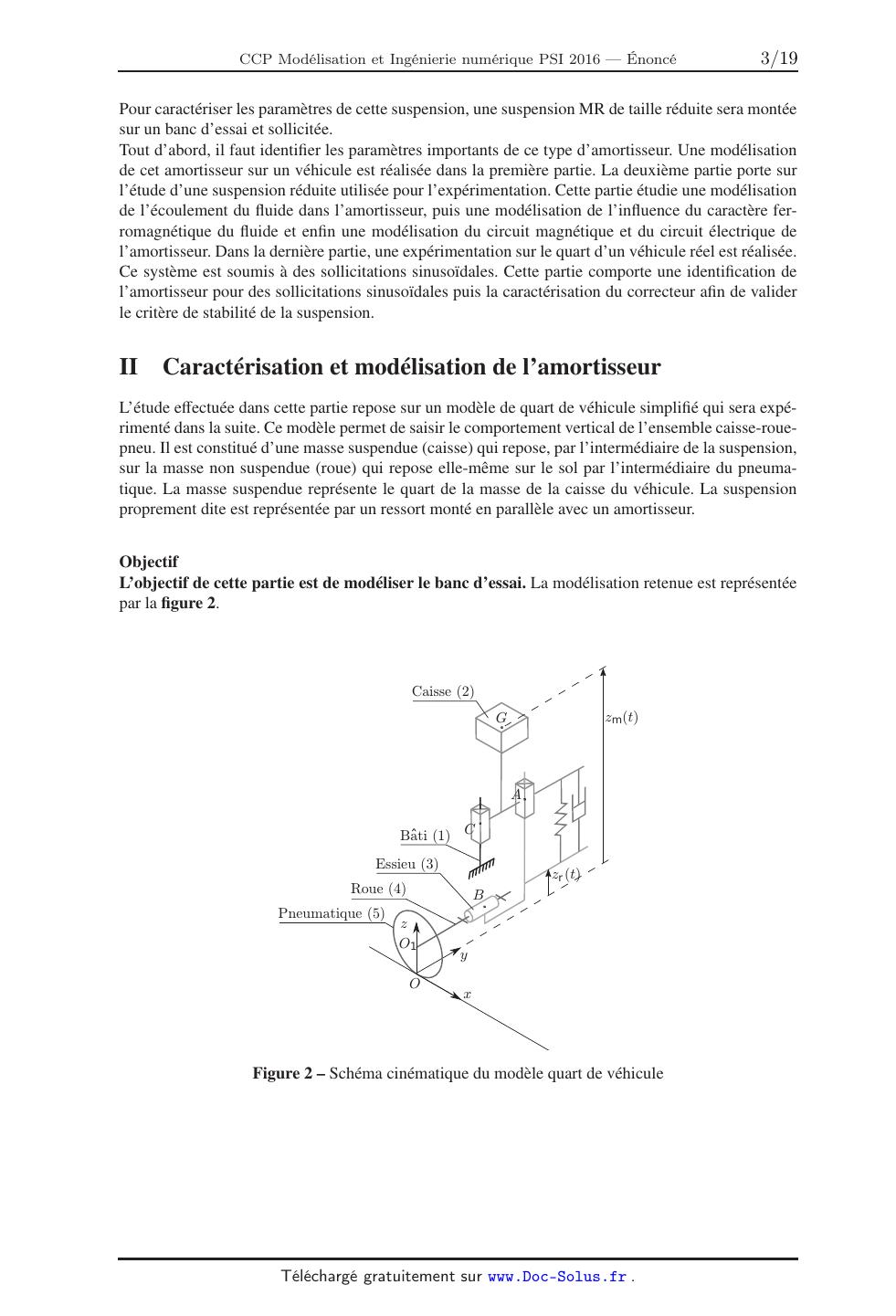
Objectif
L'objectif de cette partie est de modéliser le banc d'essai. La modélisation
retenue est représentée
par la figure 2.
#$%&&' !("
&
(
)$
$*% !+" '
,&&%'- !."
#" !%"
/0-' !1"
23'-4$*%5-' !6"
)
#
$!
$
"
!
Figure 2 Schéma cinématique du modèle quart de véhicule
3/19
Hypothèses
Aucun frottement sec n'est considéré.
Seul le mouvement vertical de la voiture (caisse-essieu-roue) est pris en
compte.
Le rayon de la roue est négligé.
Le contact roue/sol est permanent.
La masse de l'essieu est négligée.
La masse de la roue est négligée.
On considère que la vitesse et l'accélération de la roue sont négligeables
devant celle de la
caisse zr (t) = 0 et z¨r (t) = 0.
La masse m est associée à la portion de poids du quart de véhicule reposant sur
la roue comme cela
est expliqué dans l'introduction.
Soit R(O,x,y,z) le repère galiléen prenant la route comme solide de référence.
Soit G le centre de
gravité de la caisse, tel que : O1G = ay + (zm (t) - zr (t))z.
On note :
m la masse du quart de la caisse en kg.
k la constante de raideur du ressort en N.m-1 .
c le coefficient de frottement fluide dans l'amortisseur en N.(m.s-1 )-1 .
Données
Action mécanique due à l'amortisseur sur la caisse en négligeant zr (t) :
Fa = -c(zm (t))z
.
{TAmortisseurcaisse } =
-
0
(1)
A
Action mécanique due au ressort sur la caisse :
Fr = -k(zm (t) - zr (t))z
{TRessortcaisse } =
-
0
A
On notera une action mécanique de la forme :
Xi j Li j
Y
M
Ti j =
ij
ij
Z
N
i
j
i
j
R
P
.
(2)
(3)
où
Xi j , Yi j , Zi j sont les composantes de la résultante du torseur Ti j dans
le repère R(O,x,y,z).
Li j , Mi j , Ni j sont les composantes du moment du torseur Ti j au point de
réduction P dans le
repère R(O,x,y,z).
Q1. Donner la forme du torseur d'action mécanique transmissible des liaisons
en A, B et C.
Exprimer le torseur de l'action mécanique de la pesanteur sur la caisse T
pesanteurcaisse .
4/19
Q2. Appliquer le Principe Fondamental de la dynamique à la caisse en résultante
suivant z. Écrire
l'équation différentielle en fonction de zm (t) et zr (t) et de leurs dérivées
temporelles éventuelles.
On pose : zm0 (t) -
mg
= zm (t).
k
Q3. Réécrire l'équation différentielle précédente en effectuant le changement
de variable défini
ci-dessus.
Q4. Effectuer le passage de l'équation différentielle dans le domaine de
Laplace en considérant des
conditions initiales nulles. On notera Zm0 (p) = L [zm0 (t)] et Zr (p) = L [zr
(t)]. La mettre sous
la forme donnée ci-dessous en exprimant les constantes K, 0 et 0 .
H(p) =
Zm0 (p)
=
Zr (p)
1+
K
20
0
p+
1
20
p2
.
H(j!)=2e0j
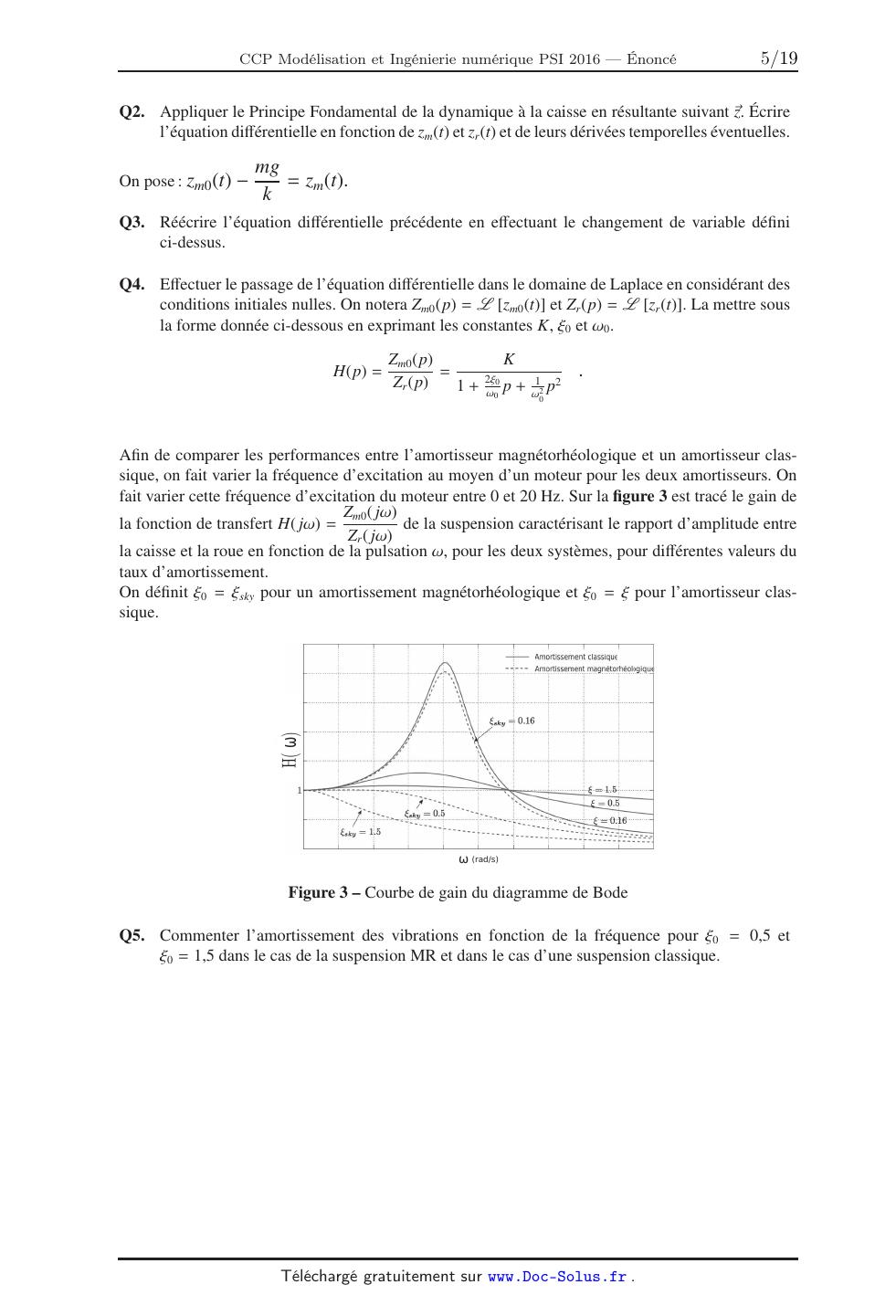
Afin de comparer les performances entre l'amortisseur magnétorhéologique et un
amortisseur classique, on fait varier la fréquence d'excitation au moyen d'un
moteur pour les deux amortisseurs. On
fait varier cette fréquence d'excitation du moteur entre 0 et 20 Hz. Sur la
figure 3 est tracé le gain de
Zm0 ( j)
la fonction de transfert H( j) =
de la suspension caractérisant le rapport d'amplitude entre
Zr ( j)
la caisse et la roue en fonction de la pulsation , pour les deux systèmes, pour
différentes valeurs du
taux d'amortissement.
On définit 0 = sky pour un amortissement magnétorhéologique et 0 = pour
l'amortisseur classique.
"#$%&'(
(avec !=1)
Figure 3 Courbe de gain du diagramme de Bode
Q5. Commenter l'amortissement des vibrations en fonction de la fréquence pour 0
= 0,5 et
0 = 1,5 dans le cas de la suspension MR et dans le cas d'une suspension
classique.
5/19
III
Description de l'amortisseur à fluide magnétorhéologique
Objectif
Modéliser l'écoulement du fluide dans l'amortisseur et montrer que
l'amortisseur exerce sur
= - V
où V
est la vitesse de la roue
la roue une force d'amortissement de la forme F
perpendiculairement à la route.
-z ). À l'inL'amortisseur est constitué d'un fluide enfermé dans un cylindre de
révolution d'axe (O
térieur de ce cylindre se trouve un piston, de même diamètre que le cylindre,
percé d'une valve. On
suppose que le piston coulisse sans frottements à l'intérieur du cylindre.
Le fluide enfermé dans le cylindre est ici une huile, que l'on supposera
newtonienne (en absence de
champ magnétique) et incompressible. Lorsque le véhicule roule sur une
anfractuosité de la route, le
piston se déplace dans le cylindre et le fluide passe d'un coté à l'autre du
piston en s'écoulant par la
valve.
Le corps du piston est constitué d'un matériau ferromagnétique doux (acier) et
d'une bobine parcourue par un courant électrique d'intensité i. Le tout forme
un circuit magnétique dont la valve est
l'entrefer.
Données et notations utilisées
Les données ci-dessous sont celles de l'amortisseur de taille réduite utilisé
pour réaliser les expériences :
coefficient de viscosité dynamique de l'huile MR : = 1,0 Pa.s ;
masse volumique de l'huile MR : = 3,0 kg.L-1 ;
splitéabilité magnétique relative de l'acier : µ1 5 000 ;
splitéabilité magnétique relative de l'huile MR : µ2 2,5 ;
rayon du piston (S p sa surface) : r p = 10 mm ;
rayon interne de la valve : r1 = 7,0 mm ;
rayon externe de la valve : r2 = 8,0 mm;
rayon moyen de la valve : rm ;
circonférence moyenne de la valve : w = 2rm ;
épaisseur de la valve : e = 1,0 mm ;
longueur du piston : L = 20 mm ;
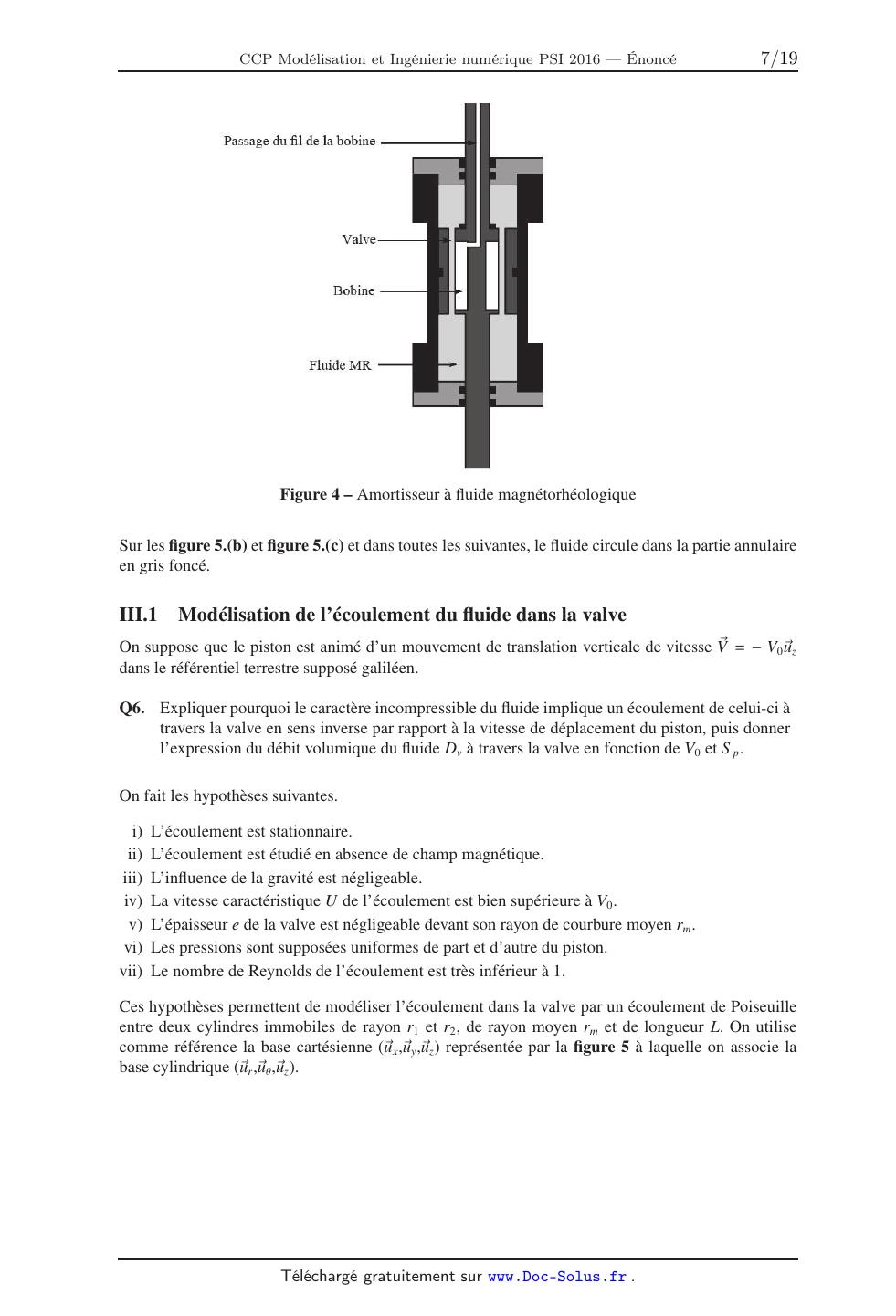
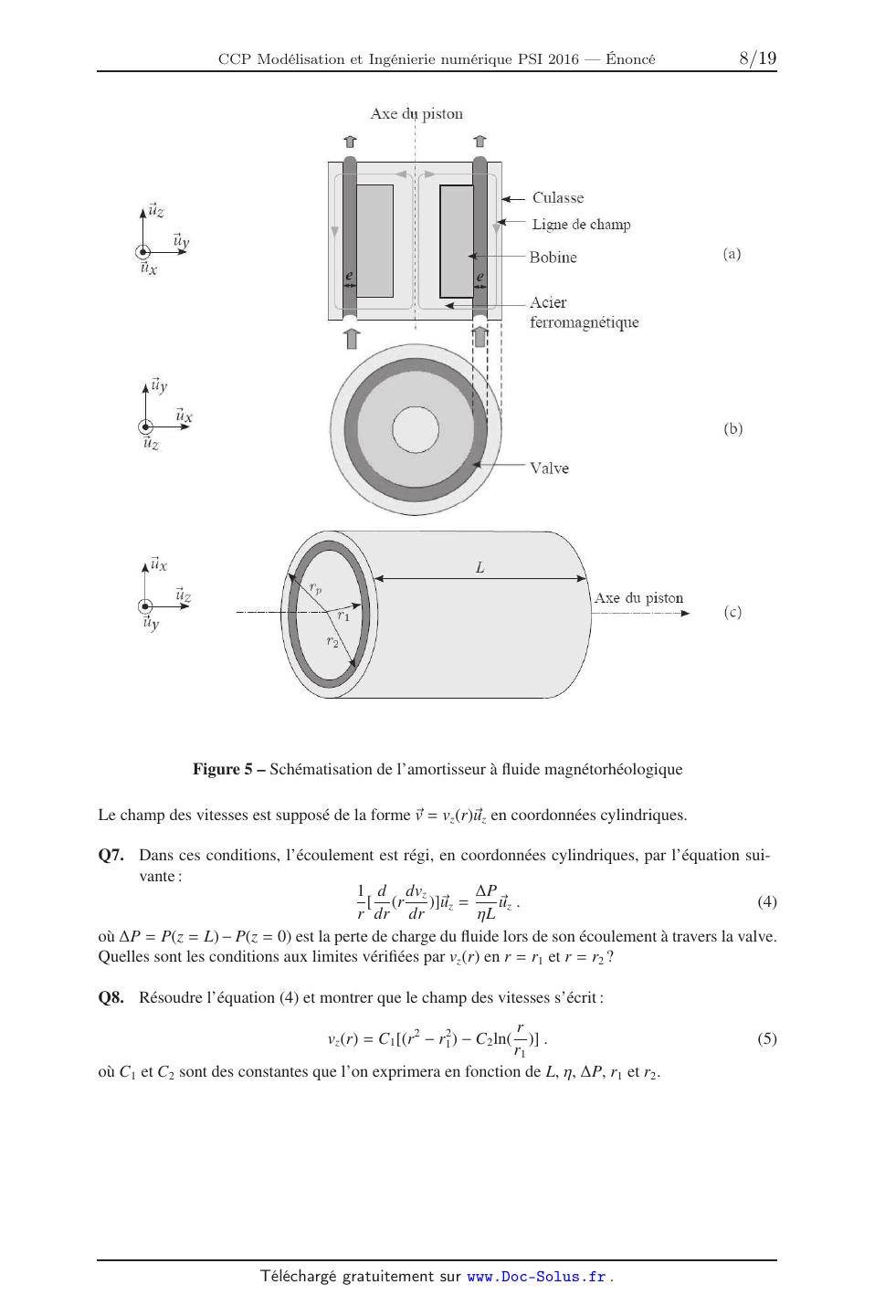
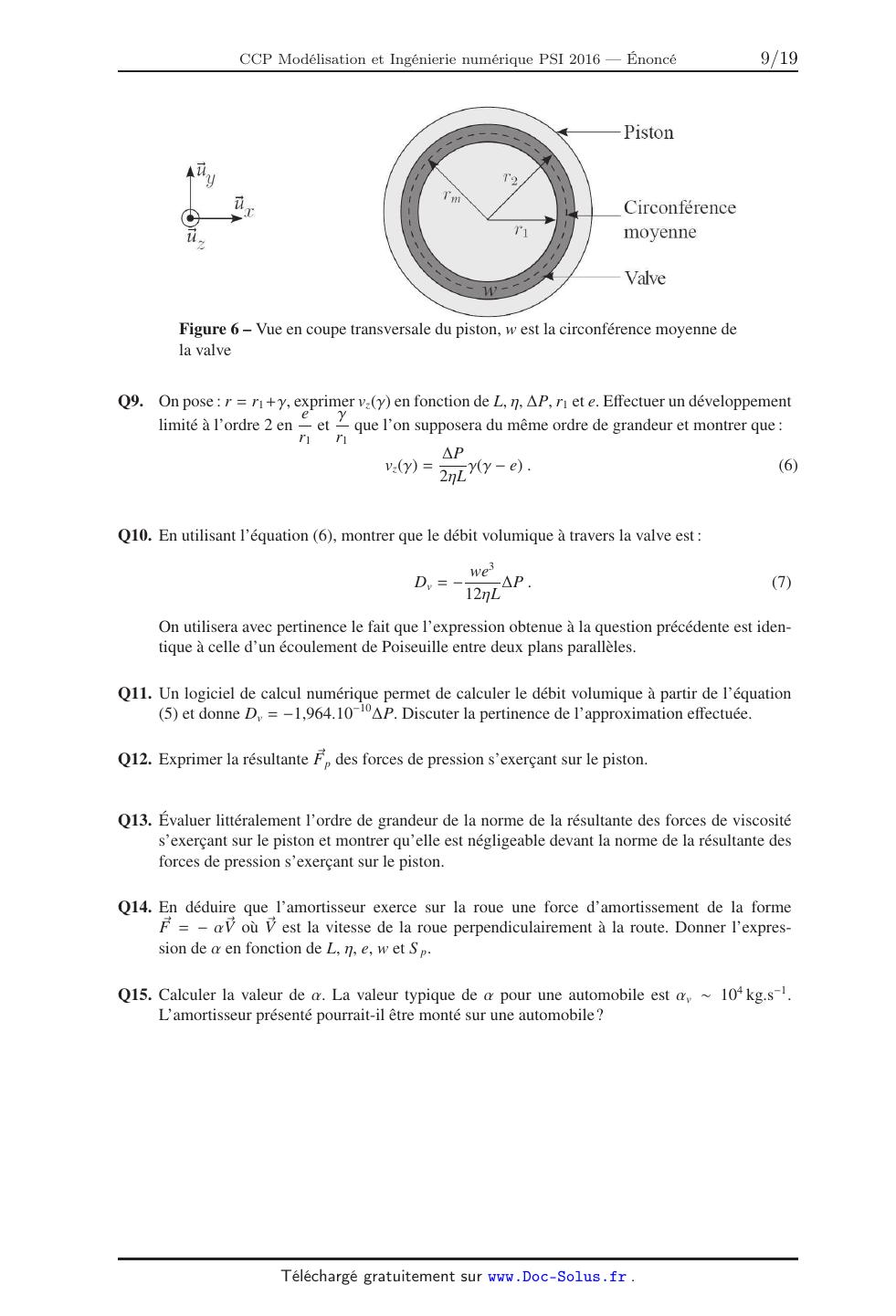
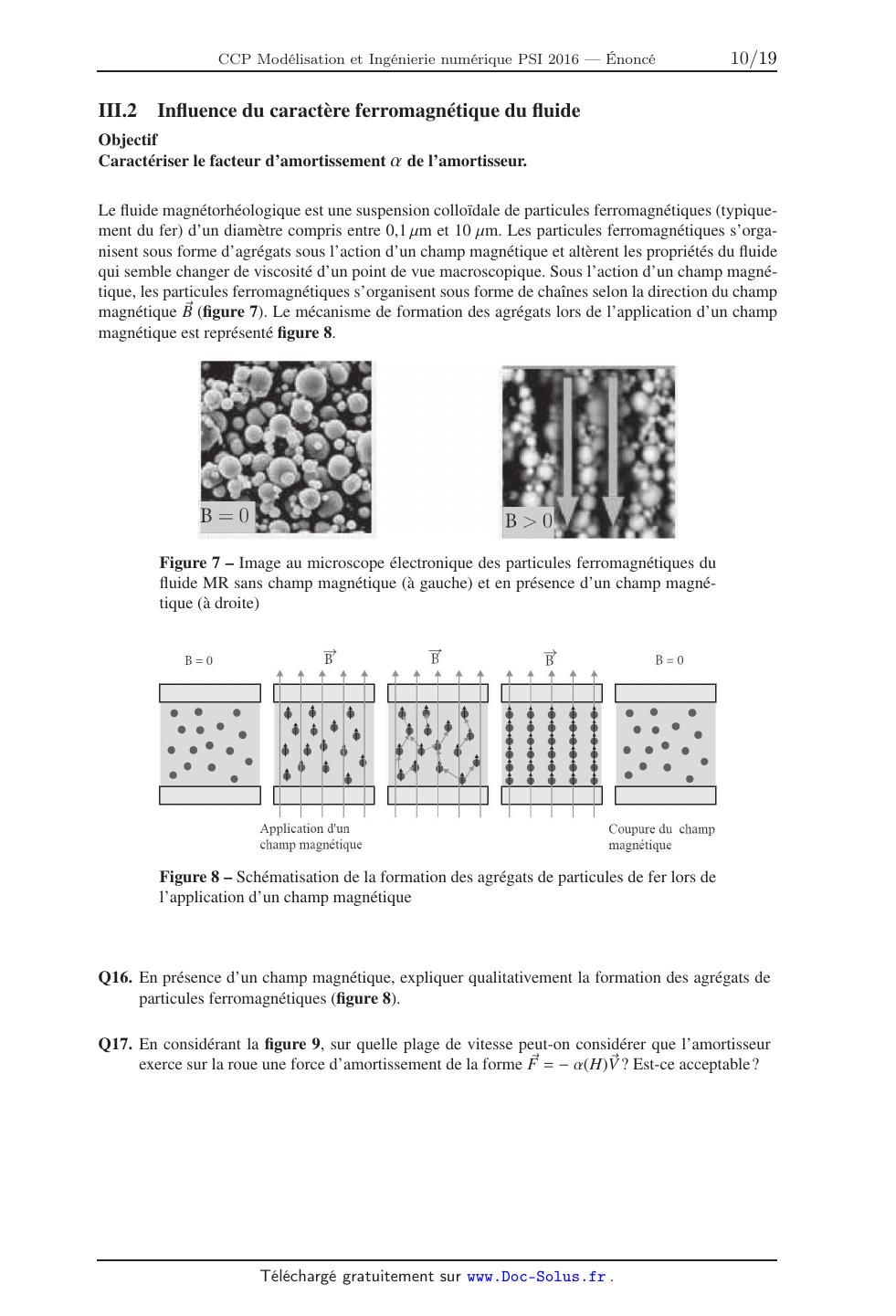
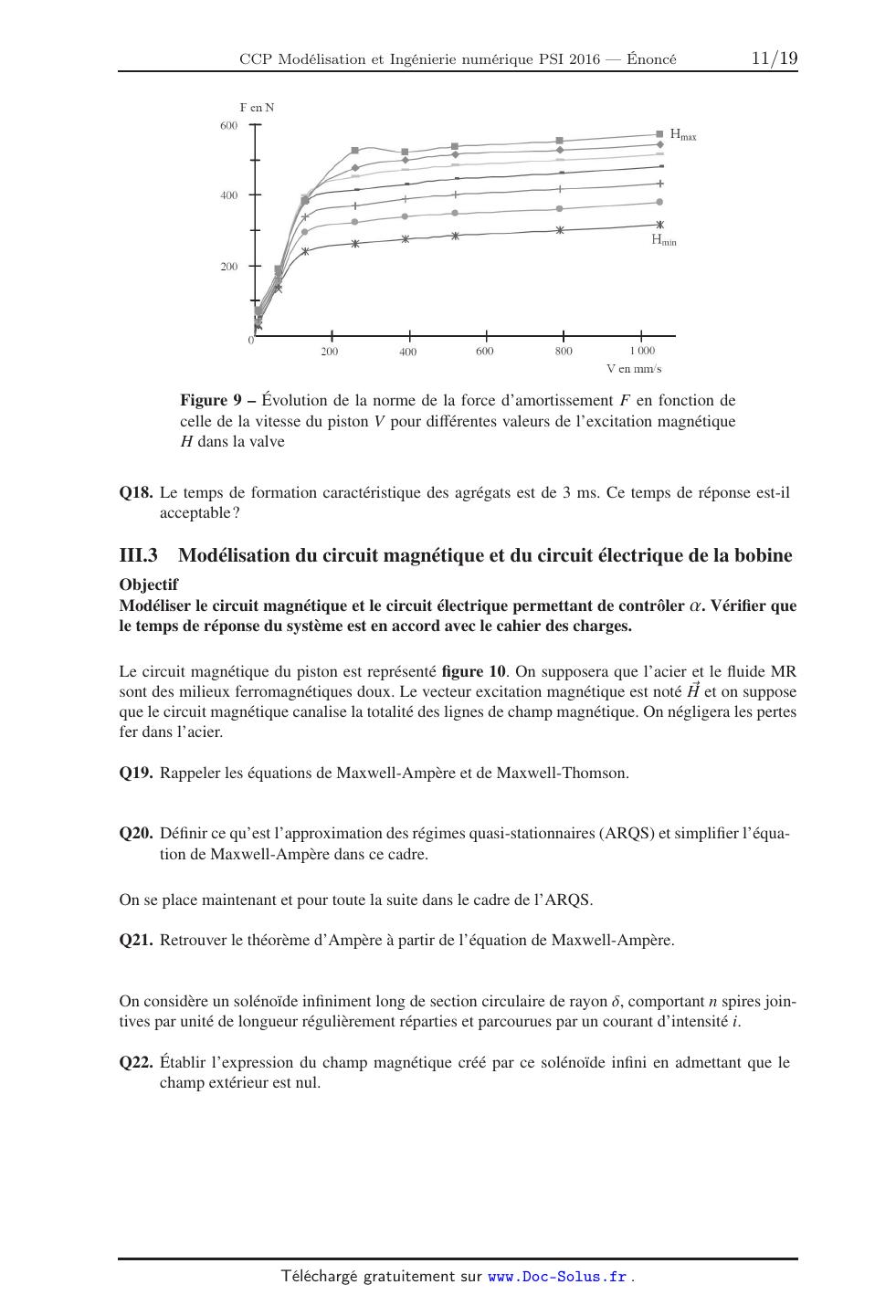
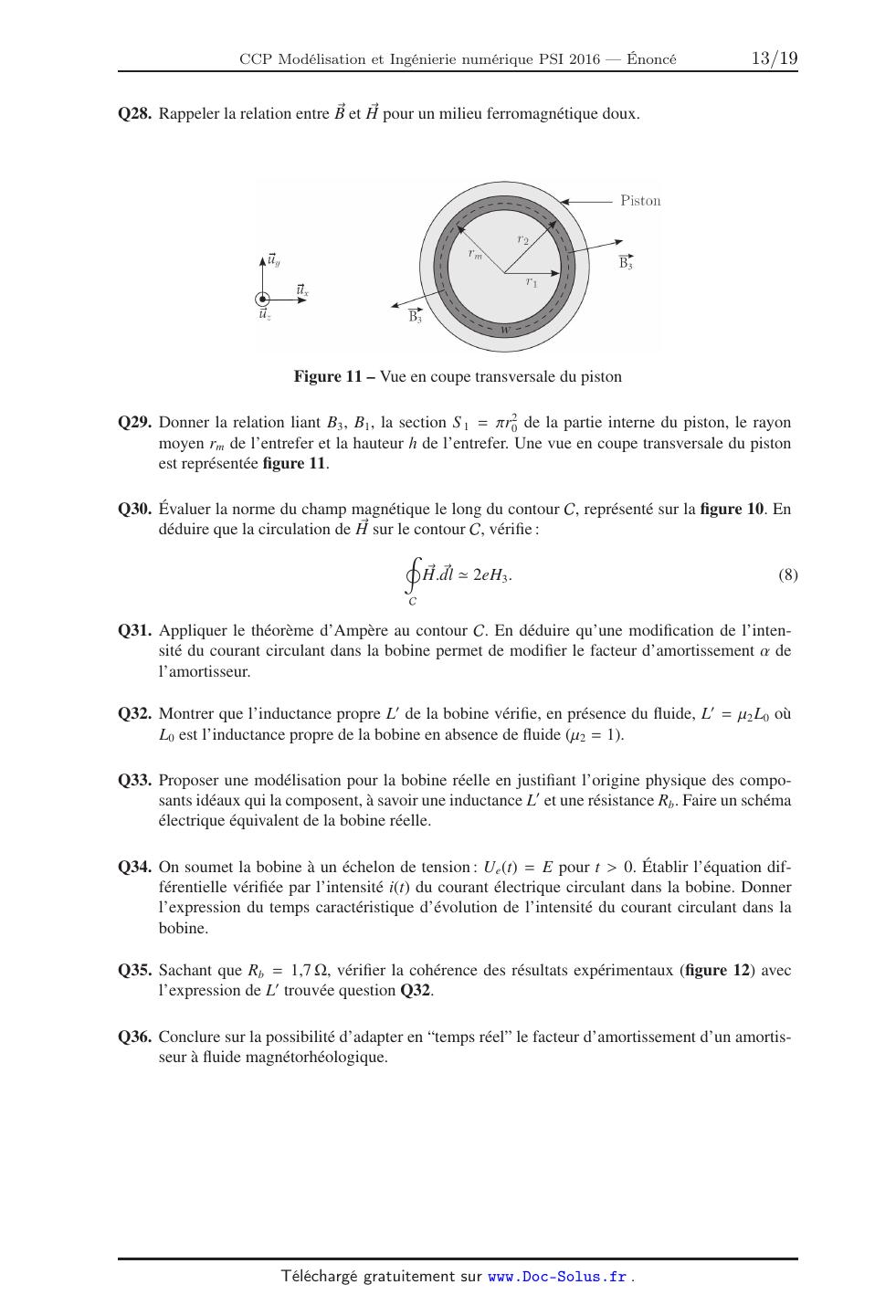
vitesse caractéristique de déplacement du piston : 0 < V0 < 100 mm.s-1 ; intensité du courant électrique circulant dans la bobine : i ; nombre de spires (jointives) de la bobine : N ; rayon interne de la bobine : r0 = 3,0 mm ; hauteur de l'entrefer : h = 1,0 mm ; développements limités en 0 : ( - 1) 2 (1 + x) = 1 + x + x + (x2 ) ; x0 2 x2 + (x2 ) ; ln(1 + x) = x - x0 2 lors des applications numériques, on utilisera les données suivantes : 16 50 ; 0,1963. 16 6/19 Figure 4 Amortisseur à fluide magnétorhéologique Sur les figure 5.(b) et figure 5.(c) et dans toutes les suivantes, le fluide circule dans la partie annulaire en gris foncé. III.1 Modélisation de l'écoulement du fluide dans la valve = - V0uz On suppose que le piston est animé d'un mouvement de translation verticale de vitesse V dans le référentiel terrestre supposé galiléen. Q6. Expliquer pourquoi le caractère incompressible du fluide implique un écoulement de celui-ci à travers la valve en sens inverse par rapport à la vitesse de déplacement du piston, puis donner l'expression du débit volumique du fluide Dv à travers la valve en fonction de V0 et S p . On fait les hypothèses suivantes. i) ii) iii) iv) v) vi) vii) L'écoulement est stationnaire. L'écoulement est étudié en absence de champ magnétique. L'influence de la gravité est négligeable. La vitesse caractéristique U de l'écoulement est bien supérieure à V0 . L'épaisseur e de la valve est négligeable devant son rayon de courbure moyen rm . Les pressions sont supposées uniformes de part et d'autre du piston. Le nombre de Reynolds de l'écoulement est très inférieur à 1. Ces hypothèses permettent de modéliser l'écoulement dans la valve par un écoulement de Poiseuille entre deux cylindres immobiles de rayon r1 et r2 , de rayon moyen rm et de longueur L. On utilise comme référence la base cartésienne (u x ,uy ,uz ) représentée par la figure 5 à laquelle on associe la base cylindrique (ur ,u ,uz ). 7/19 Figure 5 Schématisation de l'amortisseur à fluide magnétorhéologique Le champ des vitesses est supposé de la forme v = vz (r)uz en coordonnées cylindriques. Q7. Dans ces conditions, l'écoulement est régi, en coordonnées cylindriques, par l'équation suivante : 1 d dvz P uz . [ (r )]uz = (4) r dr dr L où P = P(z = L) - P(z = 0) est la perte de charge du fluide lors de son écoulement à travers la valve. Quelles sont les conditions aux limites vérifiées par vz (r) en r = r1 et r = r2 ? Q8. Résoudre l'équation (4) et montrer que le champ des vitesses s'écrit : r vz (r) = C1 [(r2 - r12 ) - C2 ln( )] . r1 où C1 et C2 sont des constantes que l'on exprimera en fonction de L, , P, r1 et r2 . 8/19 (5) Figure 6 Vue en coupe transversale du piston, w est la circonférence moyenne de la valve Q9. On pose : r = r1 +, exprimer vz () en fonction de L, , P, r1 et e. Effectuer un développement e limité à l'ordre 2 en et que l'on supposera du même ordre de grandeur et montrer que : r1 r1 P vz () = ( - e) . (6) 2L Q10. En utilisant l'équation (6), montrer que le débit volumique à travers la valve est : Dv = - we3 P . 12L (7) On utilisera avec pertinence le fait que l'expression obtenue à la question précédente est identique à celle d'un écoulement de Poiseuille entre deux plans parallèles. Q11. Un logiciel de calcul numérique permet de calculer le débit volumique à partir de l'équation (5) et donne Dv = -1,964.10-10 P. Discuter la pertinence de l'approximation effectuée. Q12. Exprimer la résultante F p des forces de pression s'exerçant sur le piston. Q13. Évaluer littéralement l'ordre de grandeur de la norme de la résultante des forces de viscosité s'exerçant sur le piston et montrer qu'elle est négligeable devant la norme de la résultante des forces de pression s'exerçant sur le piston. Q14. En déduire que l'amortisseur exerce sur la roue une force d'amortissement de la forme où V est la vitesse de la roue perpendiculairement à la route. Donner l'expresF = - V sion de en fonction de L, , e, w et S p . Q15. Calculer la valeur de . La valeur typique de pour une automobile est v 104 kg.s-1 . L'amortisseur présenté pourrait-il être monté sur une automobile? 9/19 III.2 Influence du caractère ferromagnétique du fluide Objectif Caractériser le facteur d'amortissement de l'amortisseur. Le fluide magnétorhéologique est une suspension colloïdale de particules ferromagnétiques (typiquement du fer) d'un diamètre compris entre 0,1 µm et 10 µm. Les particules ferromagnétiques s'organisent sous forme d'agrégats sous l'action d'un champ magnétique et altèrent les propriétés du fluide qui semble changer de viscosité d'un point de vue macroscopique. Sous l'action d'un champ magnétique, les particules ferromagnétiques s'organisent sous forme de chaînes selon la direction du champ (figure 7). Le mécanisme de formation des agrégats lors de l'application d'un champ magnétique B magnétique est représenté figure 8. Figure 7 Image au microscope électronique des particules ferromagnétiques du fluide MR sans champ magnétique (à gauche) et en présence d'un champ magnétique (à droite) Figure 8 Schématisation de la formation des agrégats de particules de fer lors de l'application d'un champ magnétique Q16. En présence d'un champ magnétique, expliquer qualitativement la formation des agrégats de particules ferromagnétiques (figure 8). Q17. En considérant la figure 9, sur quelle plage de vitesse peut-on considérer que l'amortisseur ? Est-ce acceptable? exerce sur la roue une force d'amortissement de la forme F = - (H)V 10/19 Figure 9 Évolution de la norme de la force d'amortissement F en fonction de celle de la vitesse du piston V pour différentes valeurs de l'excitation magnétique H dans la valve Q18. Le temps de formation caractéristique des agrégats est de 3 ms. Ce temps de réponse est-il acceptable? III.3 Modélisation du circuit magnétique et du circuit électrique de la bobine Objectif Modéliser le circuit magnétique et le circuit électrique permettant de contrôler . Vérifier que le temps de réponse du système est en accord avec le cahier des charges. Le circuit magnétique du piston est représenté figure 10. On supposera que l'acier et le fluide MR et on suppose sont des milieux ferromagnétiques doux. Le vecteur excitation magnétique est noté H que le circuit magnétique canalise la totalité des lignes de champ magnétique. On négligera les pertes fer dans l'acier. Q19. Rappeler les équations de Maxwell-Ampère et de Maxwell-Thomson. Q20. Définir ce qu'est l'approximation des régimes quasi-stationnaires (ARQS) et simplifier l'équation de Maxwell-Ampère dans ce cadre. On se place maintenant et pour toute la suite dans le cadre de l'ARQS. Q21. Retrouver le théorème d'Ampère à partir de l'équation de Maxwell-Ampère. On considère un solénoïde infiniment long de section circulaire de rayon , comportant n spires jointives par unité de longueur régulièrement réparties et parcourues par un courant d'intensité i. Q22. Établir l'expression du champ magnétique créé par ce solénoïde infini en admettant que le champ extérieur est nul. 11/19 Figure 10 Schématisation du circuit magnétique du piston Q23. Que pouvez-vous dire des lignes de champ magnétique dans le cas d'un solénoïde infini? Q24. Dessiner l'allure des lignes de champ magnétique dans le cas d'un solénoïde de longueur finie. Rappeler le lien entre l'équation de Maxwell-Thomson et l'allure des lignes de champ que vous venez de tracer. Q25. Dans le cas du solénoïde infini, exprimer le flux magnétique à travers une spire. Q26. On note Nt le nombre total de spires et l la longueur du solénoïde. Exprimer, toujours en considérant le solénoïde comme infini, le flux propre p à travers les Nt spires. En déduire l'expression de l'inductance propre L p de ce solénoïde. On considère que le vecteur excitation magnétique et le champ magnétique sont uniformes au niveau de la bobine et dans l'entrefer. On note : H1 = H1uz et B1 = B1uz au niveau de la bobine ; H3 = H3ur et B3 = B3ur entre E et D (entrefer). Q27. Au vu de ce qui précède, justifier cette modélisation. 12/19 et H pour un milieu ferromagnétique doux. Q28. Rappeler la relation entre B Figure 11 Vue en coupe transversale du piston Q29. Donner la relation liant B3 , B1 , la section S 1 = r02 de la partie interne du piston, le rayon moyen rm de l'entrefer et la hauteur h de l'entrefer. Une vue en coupe transversale du piston est représentée figure 11. Q30. Évaluer la norme du champ magnétique le long du contour C, représenté sur la figure 10. En sur le contour C, vérifie : déduire que la circulation de H 2eH3 . dl H. (8) C Q31. Appliquer le théorème d'Ampère au contour C. En déduire qu'une modification de l'intensité du courant circulant dans la bobine permet de modifier le facteur d'amortissement de l'amortisseur. Q32. Montrer que l'inductance propre L de la bobine vérifie, en présence du fluide, L = µ2 L0 où L0 est l'inductance propre de la bobine en absence de fluide (µ2 = 1). Q33. Proposer une modélisation pour la bobine réelle en justifiant l'origine physique des composants idéaux qui la composent, à savoir une inductance L et une résistance Rb . Faire un schéma électrique équivalent de la bobine réelle. Q34. On soumet la bobine à un échelon de tension : Ue (t) = E pour t > 0.
Établir l'équation différentielle vérifiée par l'intensité i(t) du courant
électrique circulant dans la bobine. Donner
l'expression du temps caractéristique d'évolution de l'intensité du courant
circulant dans la
bobine.
Q35. Sachant que Rb = 1,7 , vérifier la cohérence des résultats expérimentaux
(figure 12) avec
l'expression de L trouvée question Q32.
Q36. Conclure sur la possibilité d'adapter en "temps réel" le facteur
d'amortissement d'un amortisseur à fluide magnétorhéologique.
13/19
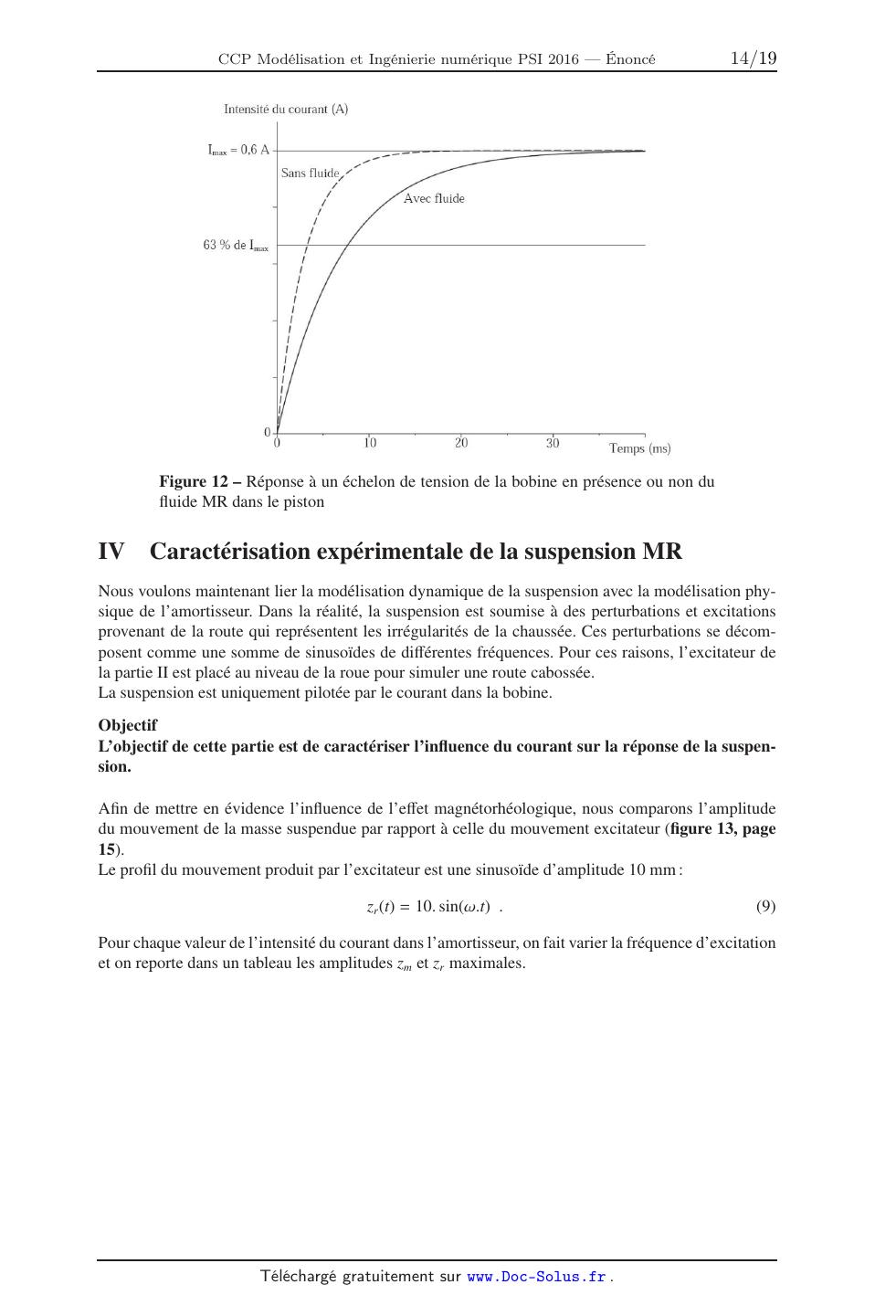
Figure 12 Réponse à un échelon de tension de la bobine en présence ou non du
fluide MR dans le piston
IV Caractérisation expérimentale de la suspension MR
Nous voulons maintenant lier la modélisation dynamique de la suspension avec la
modélisation physique de l'amortisseur. Dans la réalité, la suspension est
soumise à des perturbations et excitations
provenant de la route qui représentent les irrégularités de la chaussée. Ces
perturbations se décomposent comme une somme de sinusoïdes de différentes
fréquences. Pour ces raisons, l'excitateur de
la partie II est placé au niveau de la roue pour simuler une route cabossée.
La suspension est uniquement pilotée par le courant dans la bobine.
Objectif
L'objectif de cette partie est de caractériser l'influence du courant sur la
réponse de la suspension.
Afin de mettre en évidence l'influence de l'effet magnétorhéologique, nous
comparons l'amplitude
du mouvement de la masse suspendue par rapport à celle du mouvement excitateur
(figure 13, page
15).
Le profil du mouvement produit par l'excitateur est une sinusoïde d'amplitude
10 mm :
zr (t) = 10. sin(.t) .
(9)
Pour chaque valeur de l'intensité du courant dans l'amortisseur, on fait varier
la fréquence d'excitation
et on reporte dans un tableau les amplitudes zm et zr maximales.
14/19
#$%&&' !("
&
(
)$$*% !+" '
,&&%'- !."
#" !%"
/0-' !1"
23'-4$*%5-' !6"
)
#
$!
$
%"&'(
"
!
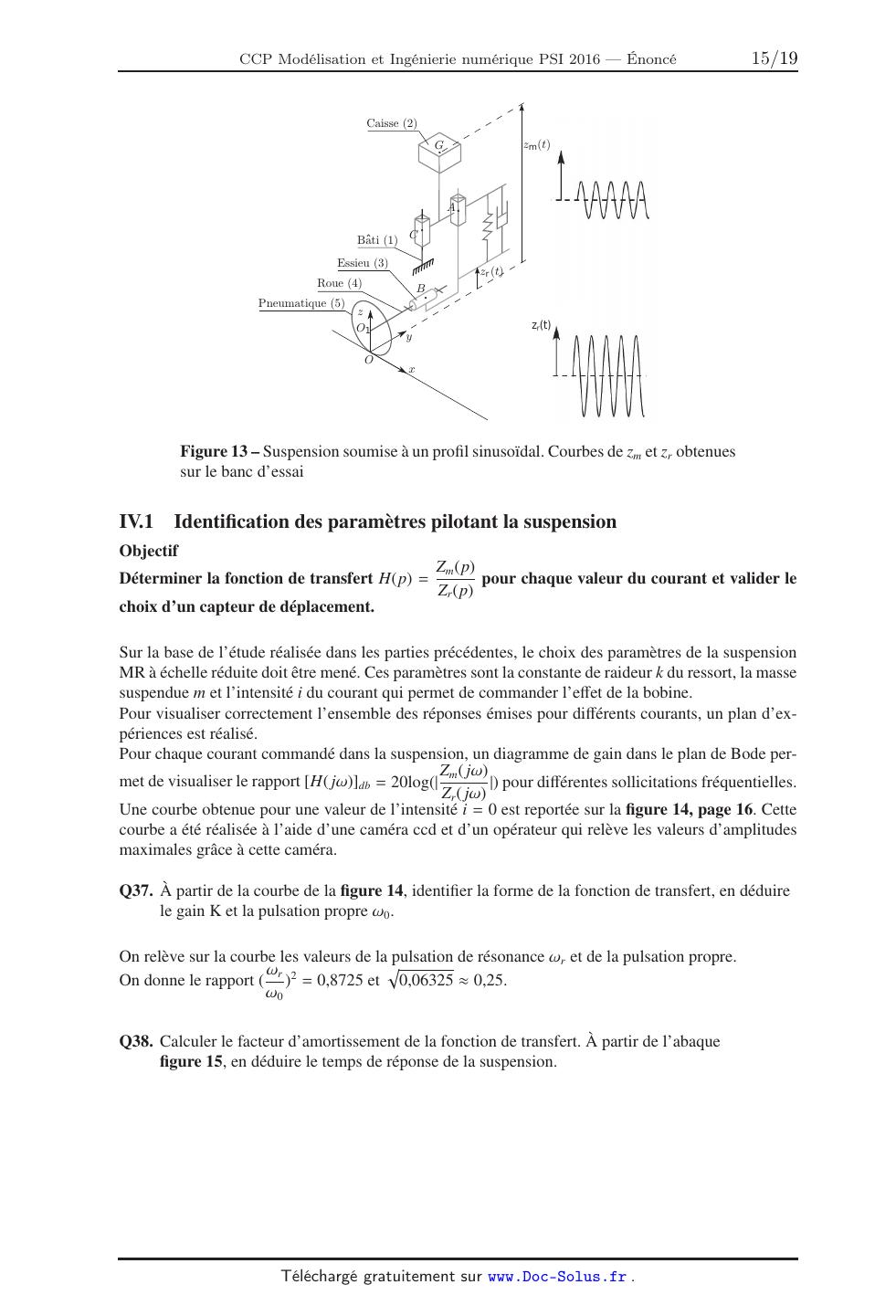
Figure 13 Suspension soumise à un profil sinusoïdal. Courbes de zm et zr
obtenues
sur le banc d'essai
IV.1
Identification des paramètres pilotant la suspension
Objectif
Déterminer la fonction de transfert H(p) =
Zm (p)
pour chaque valeur du courant et valider le
Zr (p)
choix d'un capteur de déplacement.
Sur la base de l'étude réalisée dans les parties précédentes, le choix des
paramètres de la suspension
MR à échelle réduite doit être mené. Ces paramètres sont la constante de
raideur k du ressort, la masse
suspendue m et l'intensité i du courant qui permet de commander l'effet de la
bobine.
Pour visualiser correctement l'ensemble des réponses émises pour différents
courants, un plan d'expériences est réalisé.
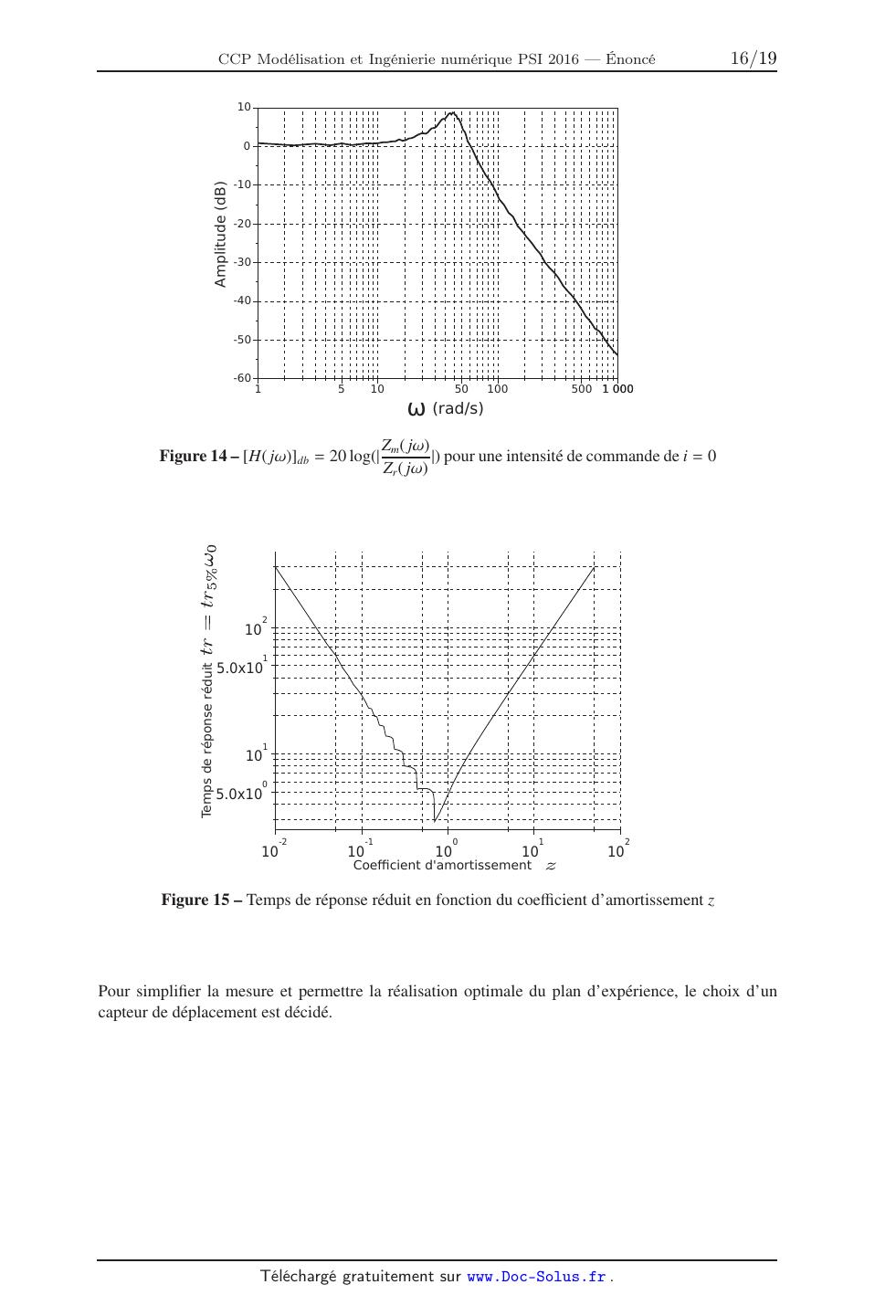
Pour chaque courant commandé dans la suspension, un diagramme de gain dans le
plan de Bode perZm ( j)
met de visualiser le rapport [H( j)]db = 20log(|
|) pour différentes sollicitations fréquentielles.
Zr ( j)
Une courbe obtenue pour une valeur de l'intensité i = 0 est reportée sur la
figure 14, page 16. Cette
courbe a été réalisée à l'aide d'une caméra ccd et d'un opérateur qui relève
les valeurs d'amplitudes
maximales grâce à cette caméra.
Q37. À partir de la courbe de la figure 14, identifier la forme de la fonction
de transfert, en déduire
le gain K et la pulsation propre 0 .
On relève sur la courbe les valeurs de la pulsation de résonance r et de la
pulsation propre.
r
On donne le rapport ( )2 = 0,8725 et 0,06325 0,25.
0
Q38. Calculer le facteur d'amortissement de la fonction de transfert. À partir
de l'abaque
figure 15, en déduire le temps de réponse de la suspension.
15/19
!"
*+,-./012#3145
"
%!"
%("
%)"
%'"
%$"
%&"
!
$
!"
$"
!""
$"" !#"""
37819:5
(avec 6=1)
Figure 14 [H( j)]db = 20 log(|
7*48601*0598).6*0591:-/
#$
Zm ( j)
|) pour une intensité de commande de i = 0
Zr ( j)
"
#
%&$'#$
#
#$
$
%&$'#$
!"
!"
#$
!#
#$
$
#
#$
()*+,-*./01234)5/-66*4*./
#$
"
Figure 15 Temps de réponse réduit en fonction du coefficient d'amortissement z
Pour simplifier la mesure et permettre la réalisation optimale du plan
d'expérience, le choix d'un
capteur de déplacement est décidé.
16/19
IV.2
Caractérisation du capteur de déplacement
On se restreint à deux types de capteur de déplacement :
un capteur de type capacitif dont le principe repose sur la mesure d'une
capacité dont la valeur
dépend de la position de l'objet cible ;
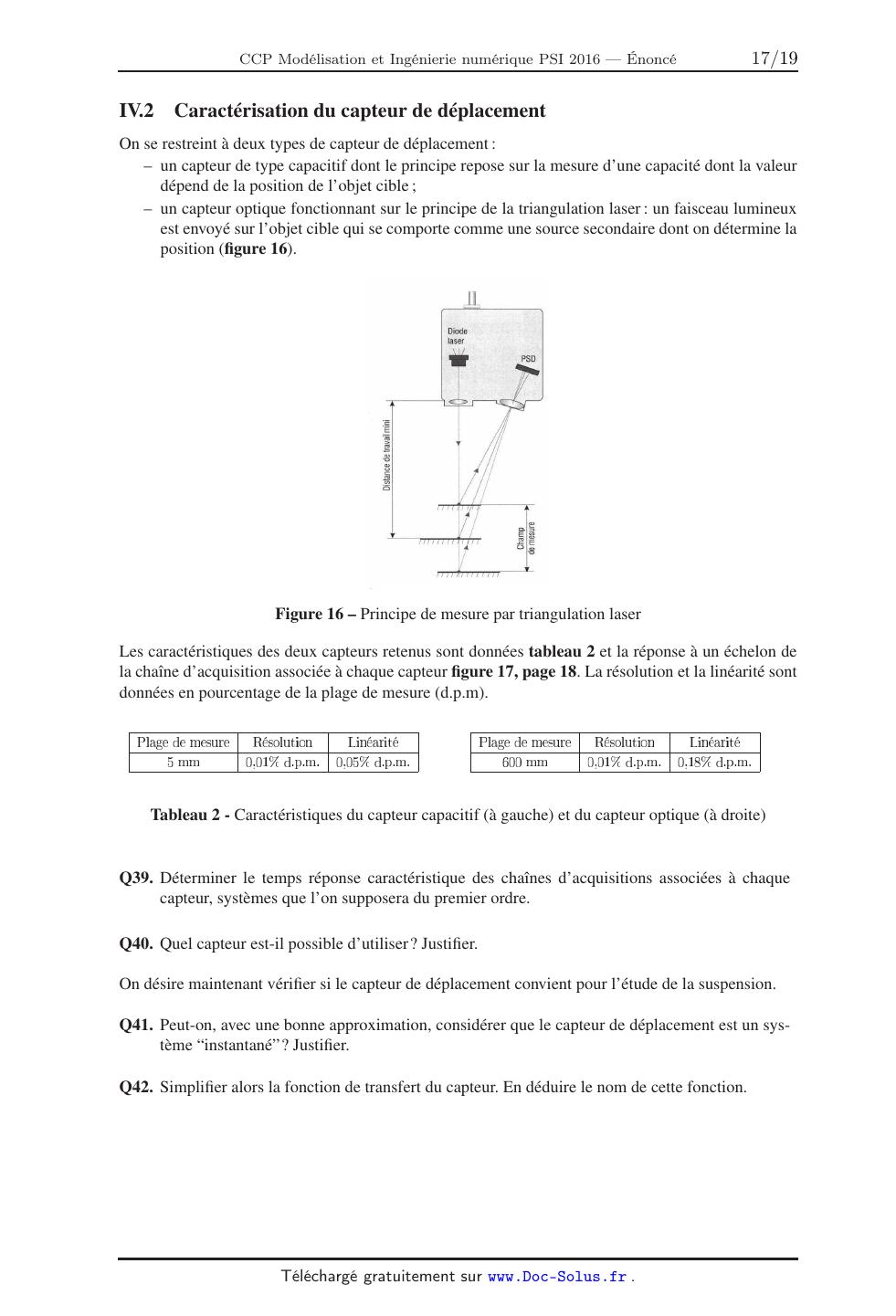
un capteur optique fonctionnant sur le principe de la triangulation laser :
un faisceau lumineux
est envoyé sur l'objet cible qui se comporte comme une source secondaire dont
on détermine la
position (figure 16).
Figure 16 Principe de mesure par triangulation laser
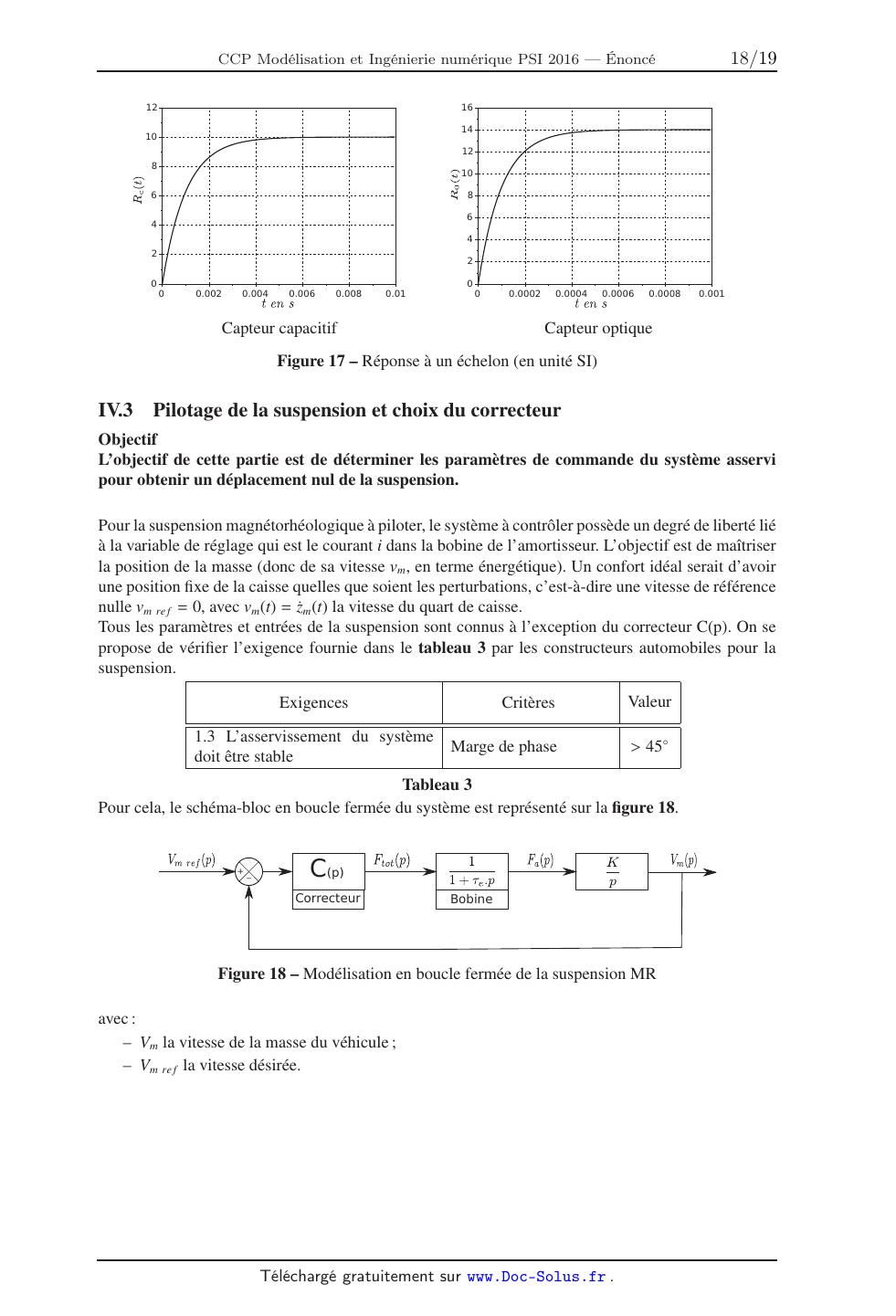
Les caractéristiques des deux capteurs retenus sont données tableau 2 et la
réponse à un échelon de
la chaîne d'acquisition associée à chaque capteur figure 17, page 18. La
résolution et la linéarité sont
données en pourcentage de la plage de mesure (d.p.m).
Tableau 2 - Caractéristiques du capteur capacitif (à gauche) et du capteur
optique (à droite)
Q39. Déterminer le temps réponse caractéristique des chaînes d'acquisitions
associées à chaque
capteur, systèmes que l'on supposera du premier ordre.
Q40. Quel capteur est-il possible d'utiliser? Justifier.
On désire maintenant vérifier si le capteur de déplacement convient pour
l'étude de la suspension.
Q41. Peut-on, avec une bonne approximation, considérer que le capteur de
déplacement est un système "instantané"? Justifier.
Q42. Simplifier alors la fonction de transfert du capteur. En déduire le nom de
cette fonction.
17/19
()*+,-
()*+,-
#&
#$
#%
#!
#$
'
#!
'
&
&
%
%
$
$
!
!
!
!"!!$
!"!!%
!"!!&
!"!!'
!"!#
!
Capteur capacitif
!"!!!$
!"!!!%
!"!!!&
!"!!!'
!"!!#
Capteur optique
Figure 17 Réponse à un échelon (en unité SI)
IV.3
Pilotage de la suspension et choix du correcteur
Objectif
L'objectif de cette partie est de déterminer les paramètres de commande du
système asservi
pour obtenir un déplacement nul de la suspension.
Pour la suspension magnétorhéologique à piloter, le système à contrôler possède
un degré de liberté lié
à la variable de réglage qui est le courant i dans la bobine de l'amortisseur.
L'objectif est de maîtriser
la position de la masse (donc de sa vitesse vm , en terme énergétique). Un
confort idéal serait d'avoir
une position fixe de la caisse quelles que soient les perturbations,
c'est-à-dire une vitesse de référence
nulle vm re f = 0, avec vm (t) = zm (t) la vitesse du quart de caisse.
Tous les paramètres et entrées de la suspension sont connus à l'exception du
correcteur C(p). On se
propose de vérifier l'exigence fournie dans le tableau 3 par les constructeurs
automobiles pour la
suspension.
Critères
Valeur
Marge de phase
> 45
Exigences
1.3 L'asservissement du système
doit être stable
Tableau 3
Pour cela, le schéma-bloc en boucle fermée du système est représenté sur la
figure 18.
!"
#$%&
#'(()*+),(
-'./0)
Figure 18 Modélisation en boucle fermée de la suspension MR
avec :
Vm la vitesse de la masse du véhicule ;
Vm re f la vitesse désirée.
18/19
De gauche à droite, le premier bloc C(p) représente le correcteur. La sortie
correspond àla force totale
de référence F mt en N. Le deuxième bloc est l'amortisseur, dont on tient
compte du temps de réponse
électrique Te. La sortie obtenue est la force d'amortissement F a en N et le
dernier bloc représente la
caisse sur laquelle on applique la deuxième loi de Newton.
Nous désirons valider le critère de stabilité du système.
Q43. Calculer la fonction de transfert en boucle ouverte FTBO(p) du système
pour C(p)=l. Ce
système est-il précis pour une entrée temporelle Vm ref en échelon?
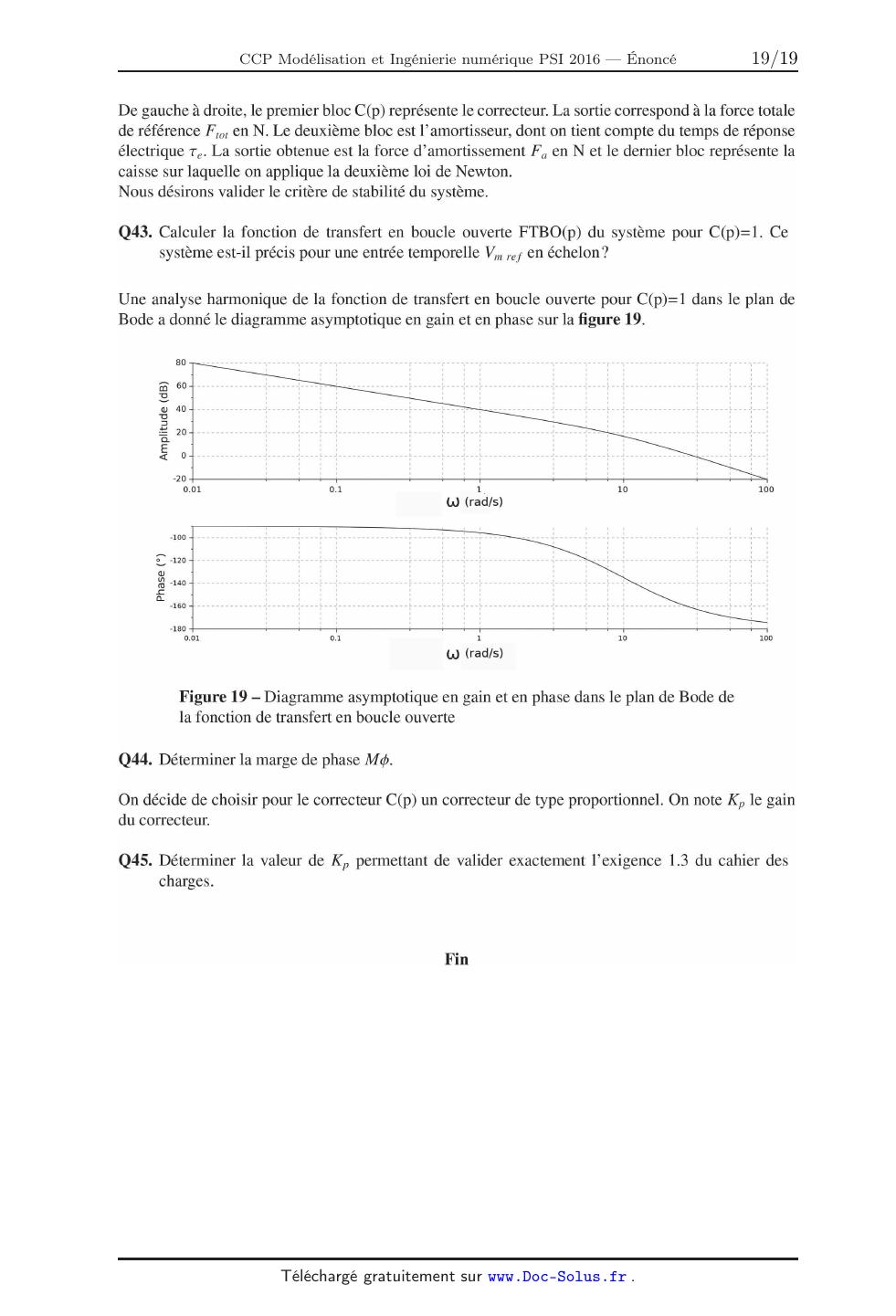
Une analyse harmonique de la fonction de transfert en boucle ouverte pour
C(p)=l dans le plan de
Bode a donné le diagramme asymptotique en gain et en phase sur la figure 19.
Amplitude (dB)
N -l> au 00
O O 0 O 0
vb
::
0.01 0.1 10 100
1.
00 (rad/s)
-100
--120
-140
Phase (°)
-160
-180 . . . . . . . . . . ,
0.01 0.1 1 10 100
w (rad/S)
Figure 19 -- Diagramme asymptotique en gain et en phase dans le plan de Bode de
la fonction de transfert en boucle ouverte
Q44. Déterminer la marge de phase M (,à.
On décide de choisir pour le correcteur C(p) un correcteur de type
proportionnel. On note K,] le gain
du correcteur.
Q45. Déterminer la valeur de Kp permettant de valider exactement l'exigence 1.3
du cahier des
charges.
Fin
19/19