
CCINP Modélisation et Ingénierie numérique PSI 2017
| Thème de l'épreuve | Modélisation d'une machine frigorifique |
| Principaux outils utilisés | thermodynamique, induction, puissance en régime sinusoïdal forcé |
| Mots clefs | machine frigorifique, diagramme (P, h), évaporation, changement d'état, modélisation acausale, moteur asynchrone, pince ampère-métrique, facteur de puissance, FTBO, correcteur proportionnel intégral, marges de phase et de gain |
Corrigé
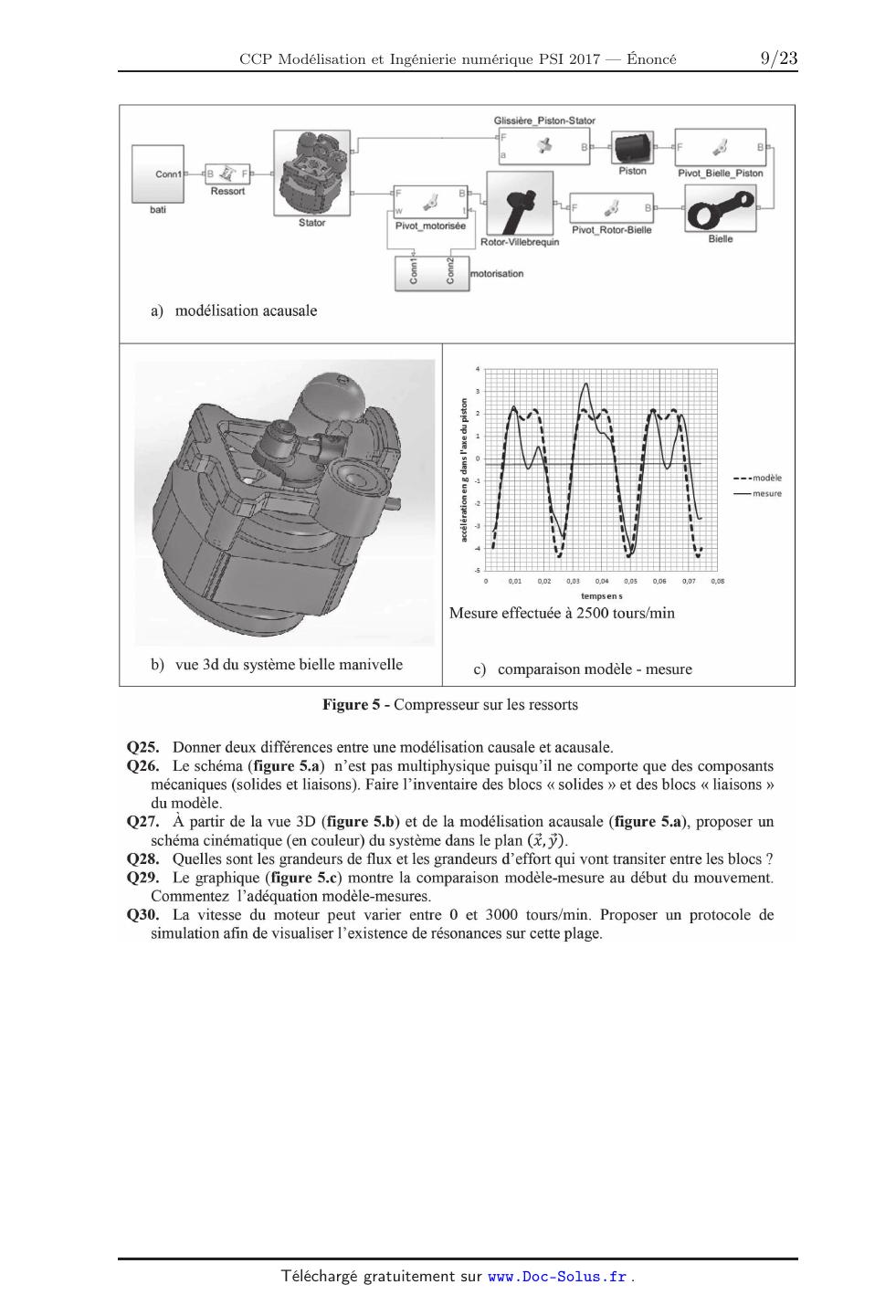
:👈 gratuite pour tous les corrigés si tu crées un compte
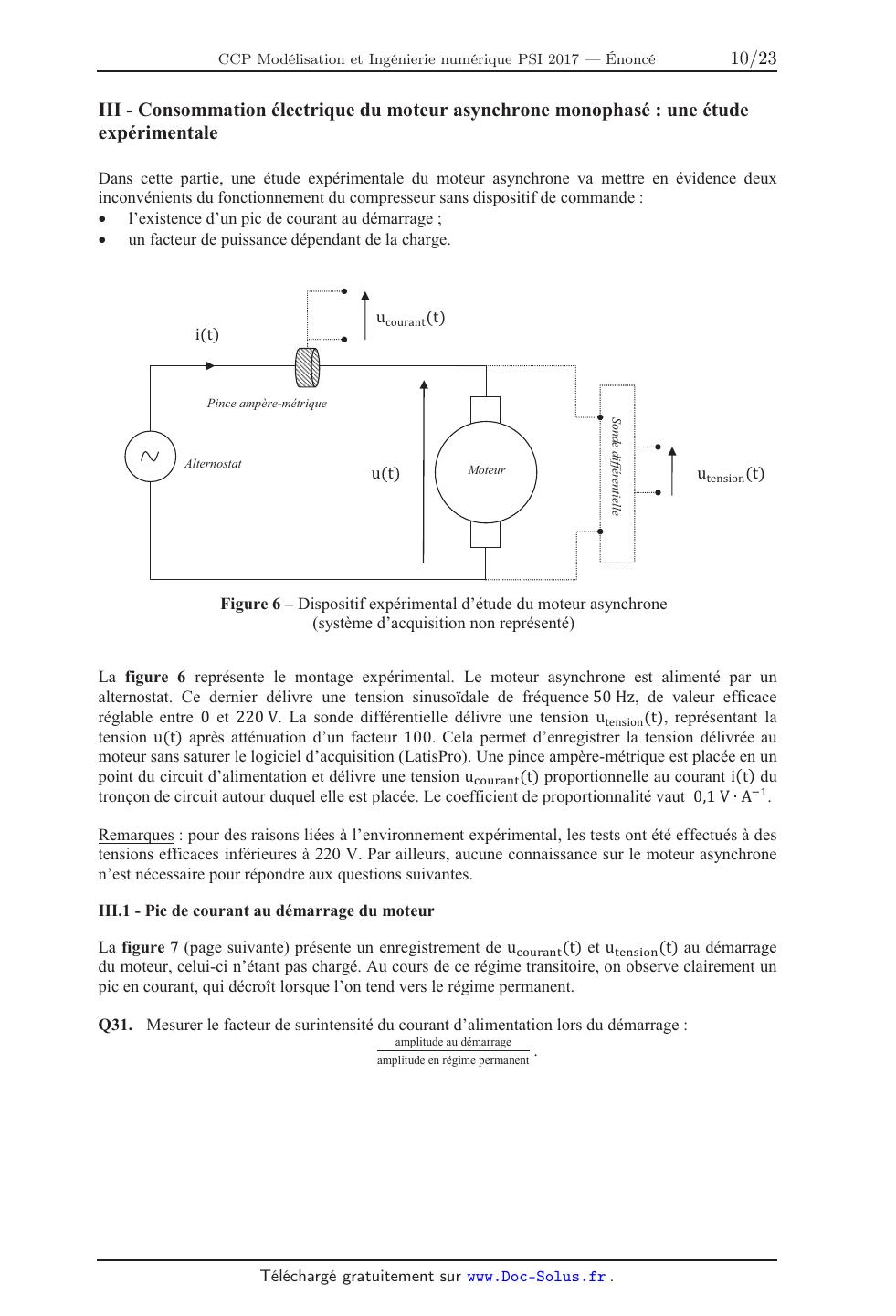
👈 l'accès aux indications de tous les corrigés ne coûte que 1 € ⬅ clique ici
👈 gratuite pour tous les corrigés si tu crées un compte
- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
👈 gratuite pour ce corrigé si tu crées un compte
- - - - - - - - - -
Énoncé complet
(télécharger le PDF)

Rapport du jury
(télécharger le PDF)
Énoncé obtenu par reconnaissance optique des caractères
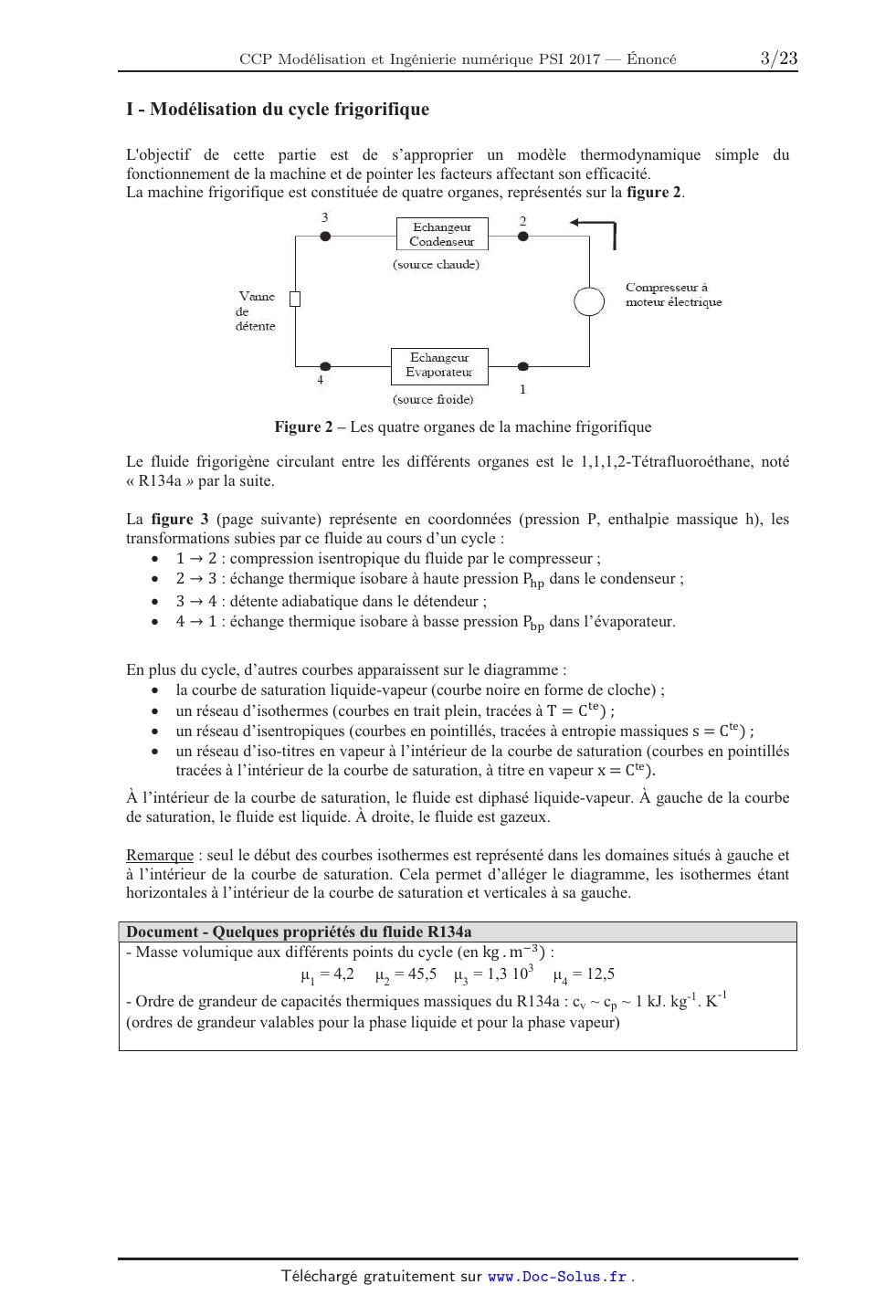
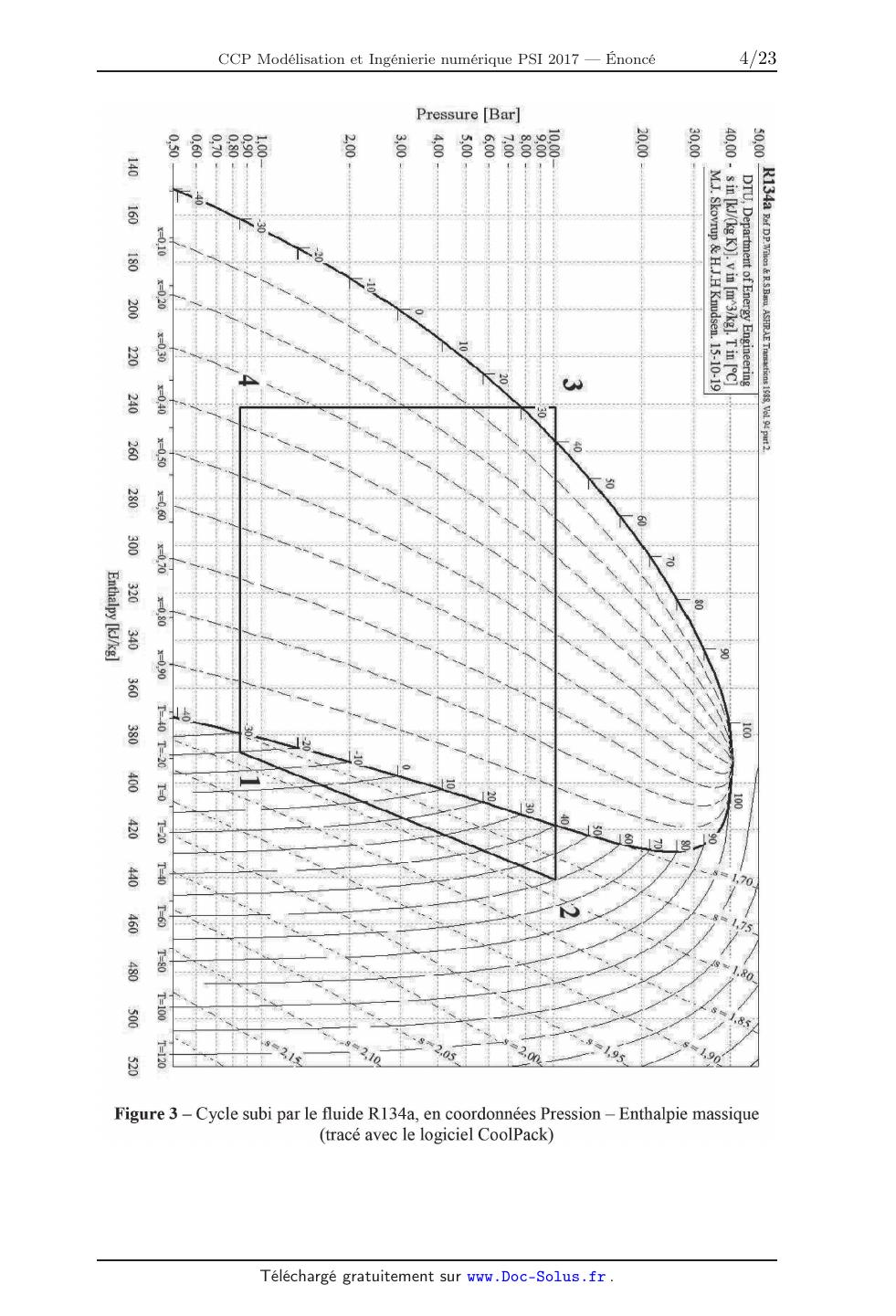
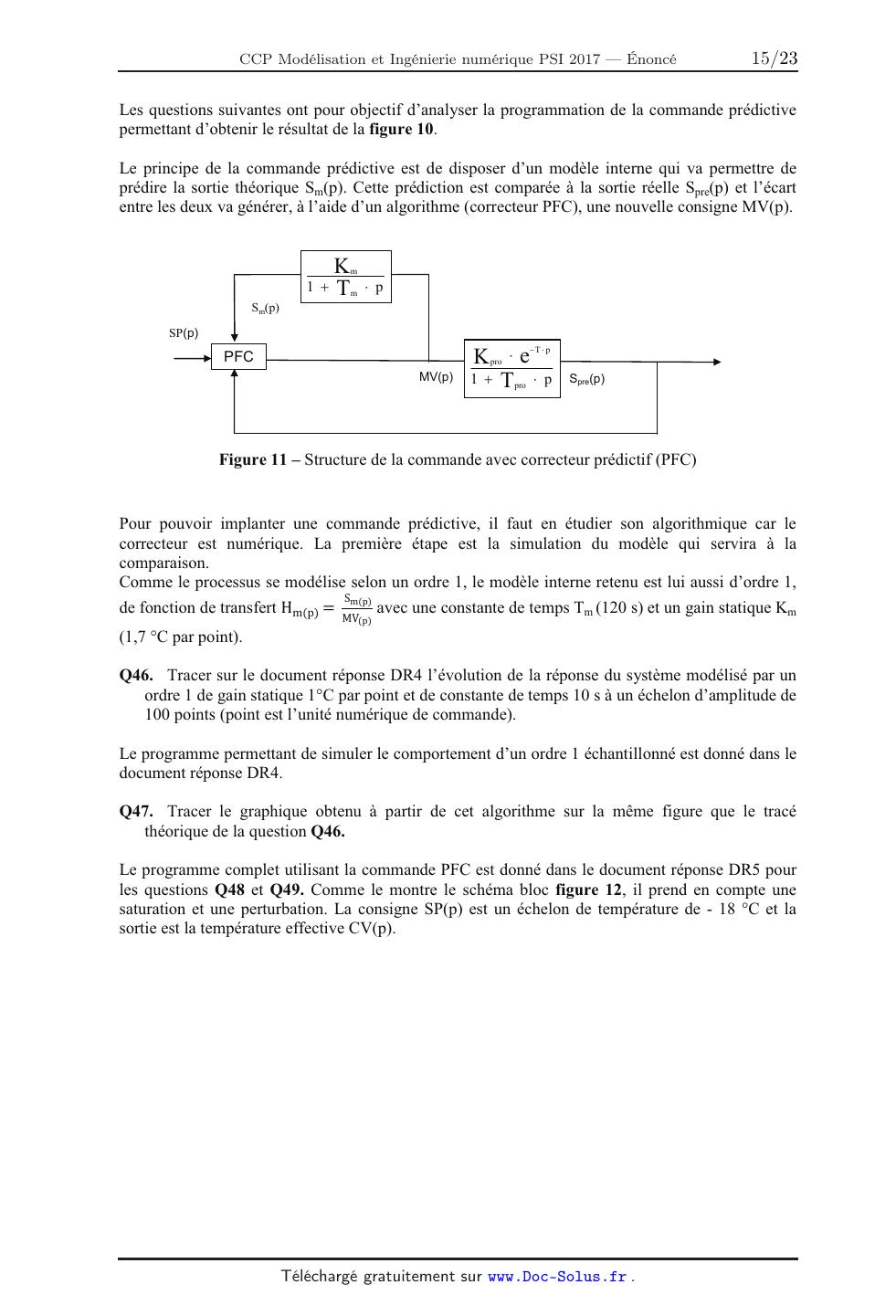
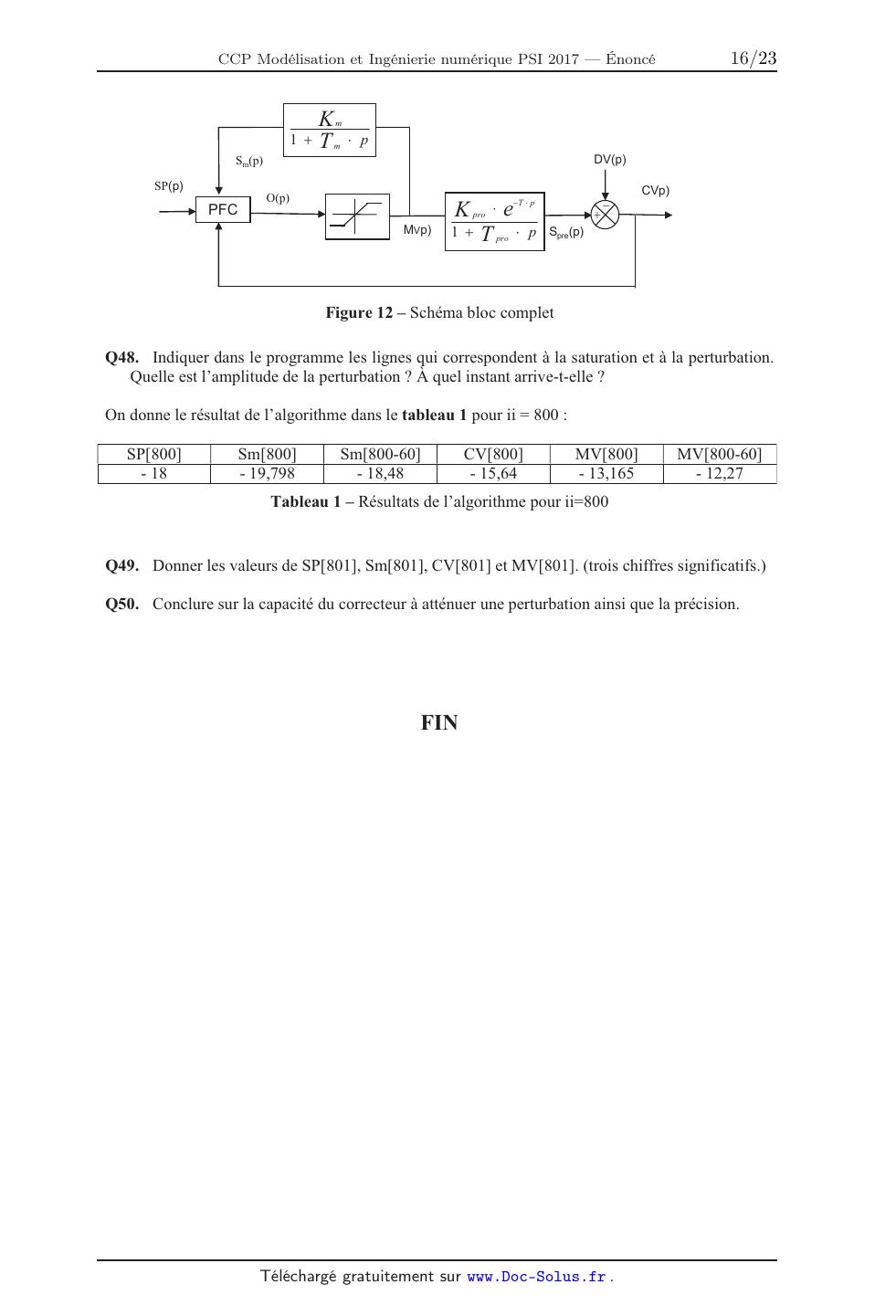
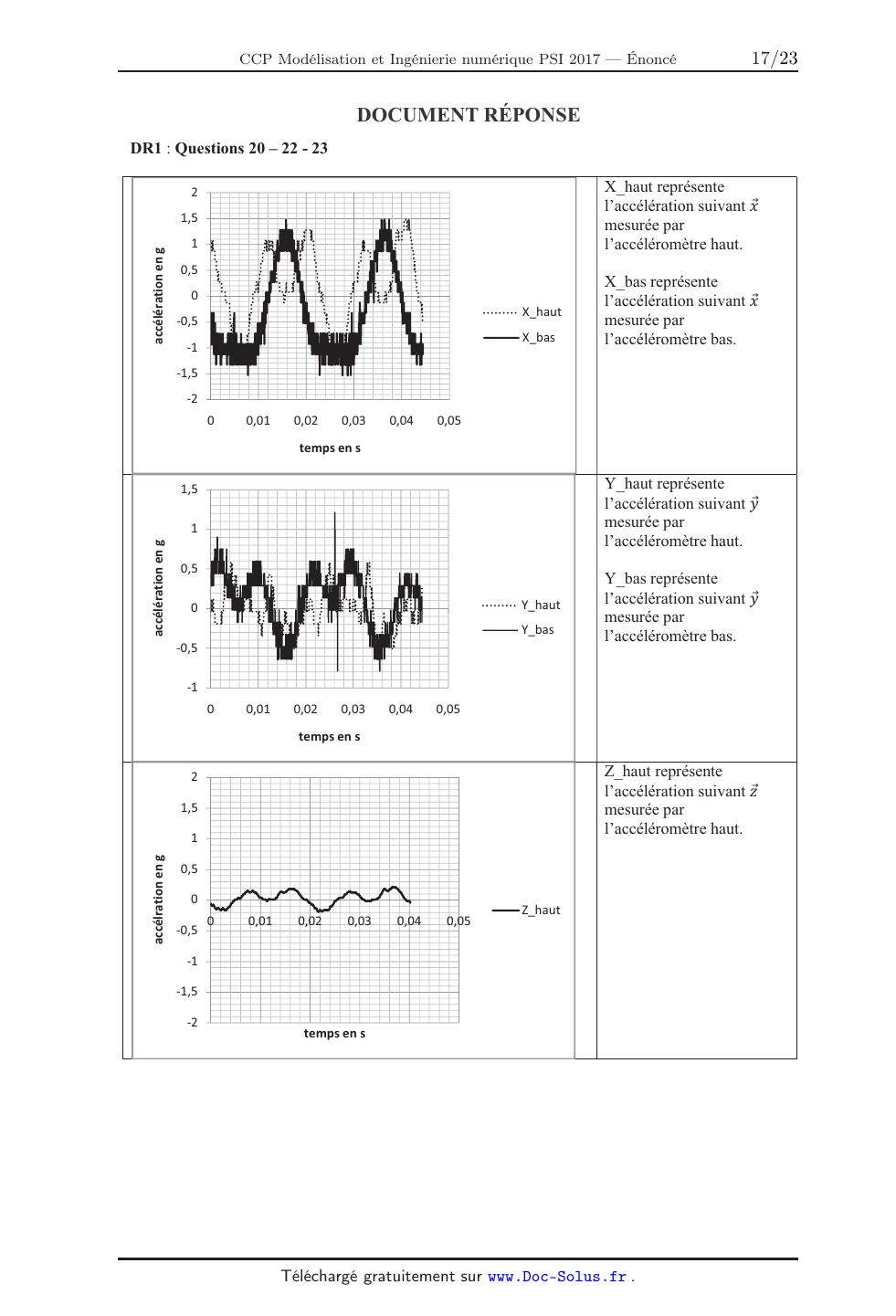
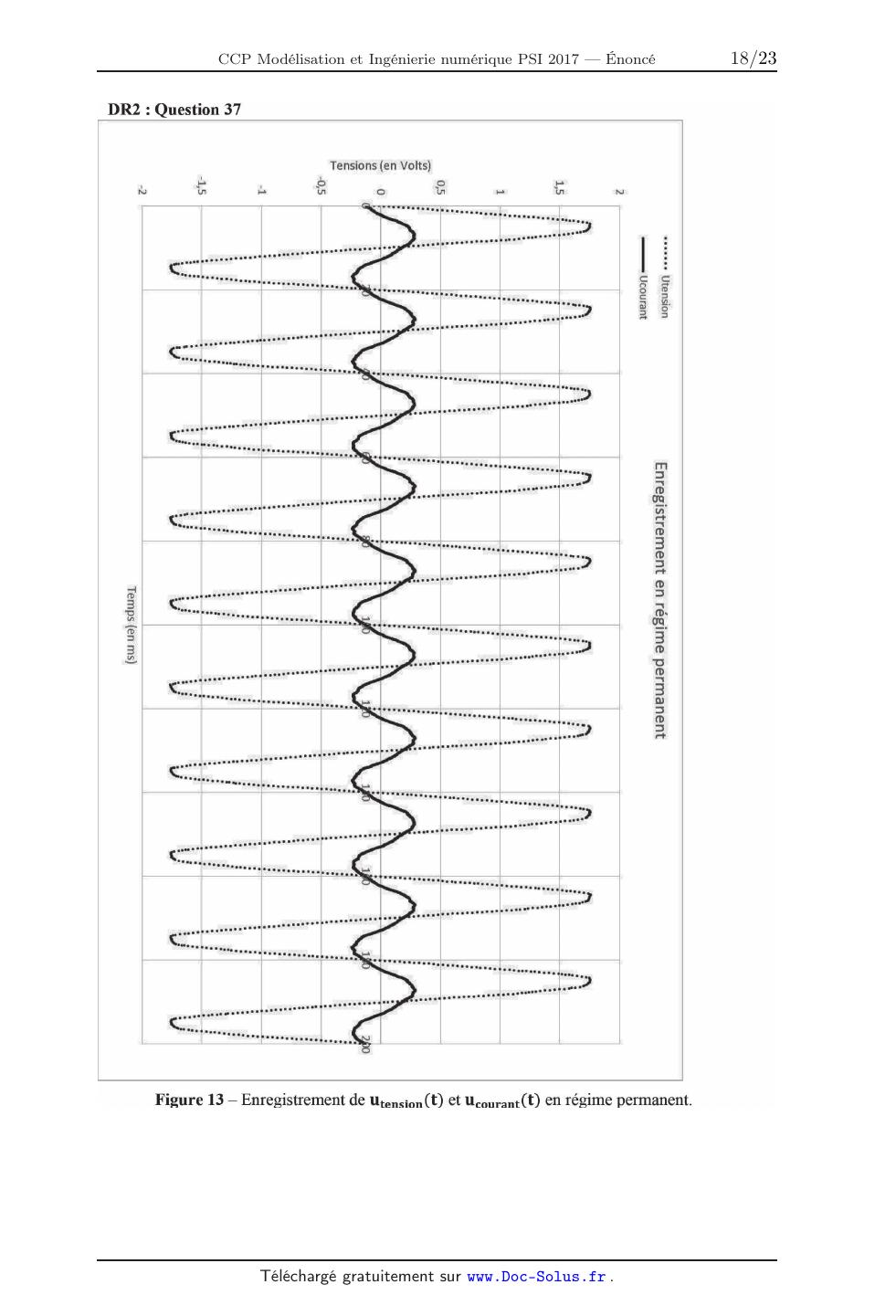
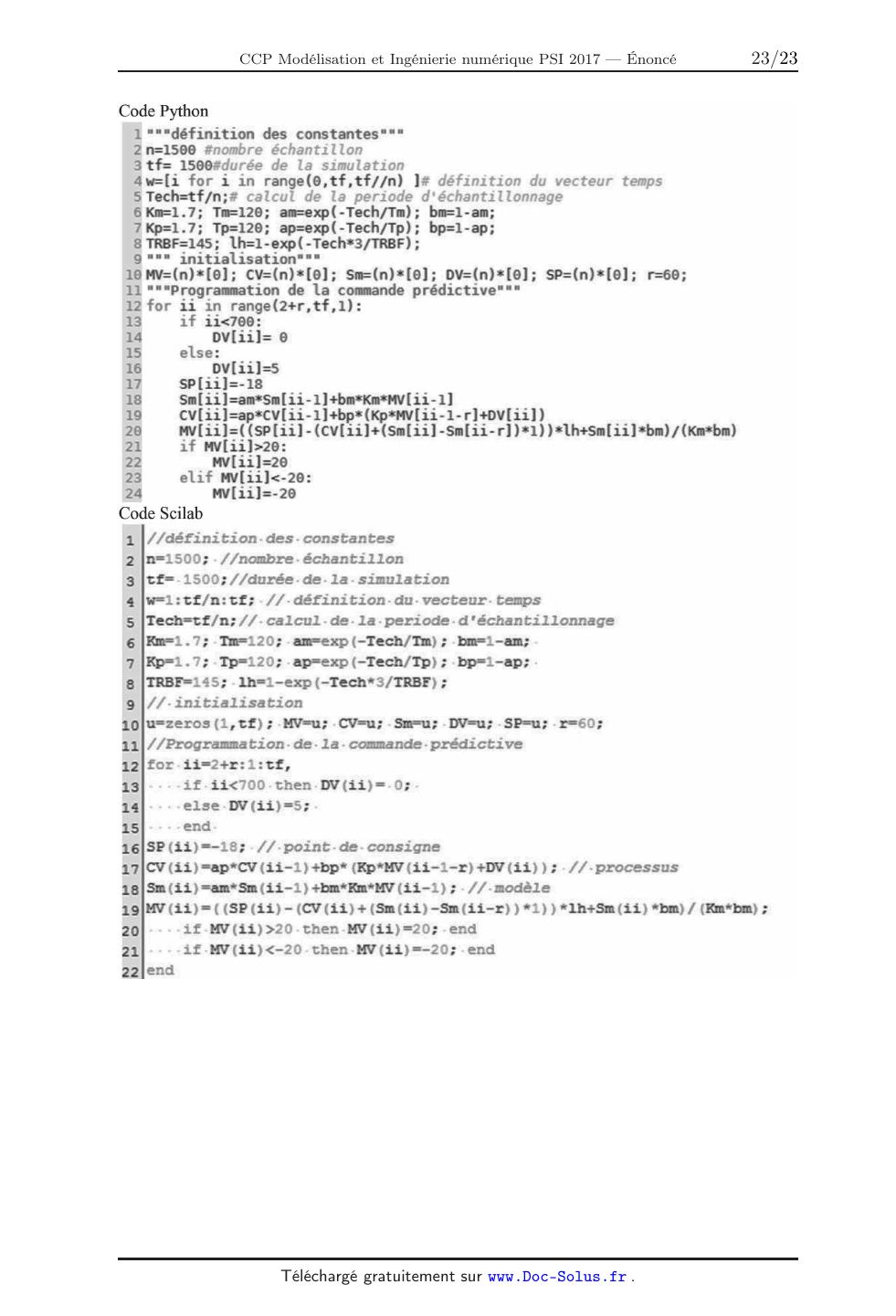
SESSION 2017 PSIMI06 ! ! ! ! ! ! ! ! EPREUVE SPECIFIQUE - FILIERE PSI! ! !!!!!!!!!!!!!!!!!!!!" ! ! ! MODELISATION ET INGENIERIE NUMERIQUE ! ! Jeudi 4 mai! : 8 h - 12 h! !!!!!!!!!!!!!!!!!!!!" ! ! ! N.B. : le candidat attachera la plus grande importance à la clarté, à la précision et à la concision de la !"#$%&'()*+,'+-)+%$)#'#$&+./&+$0.)"+1+!.2"!.!+%.+3-'+2.-&+4-'+/.054.!+6&!.+-).+.!!.-!+#7")()%"8+'4+4.+ ! signalera sur sa copie et devra poursuivre sa composition en expliquant les raisons des ini&'$&'9./+3-7'4+ ! a été amené à prendre.! ! ! ! !!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!" ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! Les calculatrices sont autorisées ! ! ! ! ! ! ! ! Le sujet est composé de 16 pages dénoncé et de 8 pages de document réponse. ! Il comporte 4 parties indépendantes. !! ! ! ! ! ! ! ! ! 1/16 A ! MODÉLISATION DUNE MACHINE FRIGORIFIQUE Présentation générale Un des enjeux majeurs de la grande distribution, de lindustrie et du tertiaire dans les années à venir sera de diviser sa consommation dénergie de moitié. La production frigorifique dun magasin représente entre 40 et 60 % de la consommation électrique (selon la superficie). La figure 1 montre une implantation. La production de froid doit être efficace malgré toutes les perturbations douverture et de fermeture des portes des congélateurs. Figure 1 Photographies dun magasin de produits surgelés et dun compresseur Aujourdhui, de nouveaux types de machines permettent dadapter la puissance du compresseur aux besoins de linstallation frigorifique en effectuant un réglage en continu de la vitesse du compresseur. Ce type dinstallation permet de gagner jusquà 25 % de consommation dénergie. Le sujet porte sur la modélisation et la justification des modèles de ces nouvelles machines. Le sujet comporte 4 parties indépendantes avec pour objectif de : !! comprendre un modèle simple du cycle frigorifique et de pointer les paramètres affectant lefficacité thermodynamique de la machine. Le contrôle en vitesse du compresseur permet de commander la puissance thermique soutirée à la source froide (nommée « puissance frigorifique ») ; !! trouver les fréquences propres de vibration du compresseur afin déviter de se placer à une vitesse critique lors de la variation de vitesse. En effet, une vibration trop grande engendrerait du bruit désagréable pour les clients ; !! mettre en évidence expérimentalement les inconvénients dune utilisation du compresseur sans dispositif de commande de la vitesse de rotation (pic de courant au démarrage et ses conséquences éventuelles, facteur de puissance dépendant de la charge) ; !! modéliser et justifier la commande prédictive de lasservissement en température. La commande prédictive est comparée à la commande Proportionnelle Intégrale qui savère moins performante pour ce type dutilisation. Remarque : dans lénoncé du sujet, une égalité notée ! représente une définition. 2/16 I - Modélisation du cycle frigorifique L'objectif de cette partie est de sapproprier un modèle thermodynamique simple du fonctionnement de la machine et de pointer les facteurs affectant son efficacité. La machine frigorifique est constituée de quatre organes, représentés sur la figure 2. Figure 2 Les quatre organes de la machine frigorifique Le fluide frigorigène circulant entre les différents organes est le 1,1,1,2-Tétrafluoroéthane, noté « R134a » par la suite. La figure 3 (page suivante) représente en coordonnées (pression P, enthalpie massique h), les transformations subies par ce fluide au cours dun cycle : !! " # $ : compression isentropique du fluide par le compresseur ; !! $ # % : échange thermique isobare à haute pression P&' dans le condenseur ; !! % # ( : détente adiabatique dans le détendeur ; !! ( # " : échange thermique isobare à basse pression P)' dans lévaporateur. En plus du cycle, dautres courbes apparaissent sur le diagramme : !! la courbe de saturation liquide-vapeur (courbe noire en forme de cloche) ; !! un réseau disothermes (courbes en trait plein, tracées à*+ , -./ 0*1* !! un réseau disentropiques (courbes en pointillés, tracées à entropie massique2*2*,*-te 0*1* !! un réseau diso-titres en vapeur à lintérieur de la courbe de saturation (courbes en pointillés tracées à lintérieur de la courbe de saturation, à titre en vapeur 3*,*-te 04* À lintérieur de la courbe de saturation, le fluide est diphasé liquide-vapeur. À gauche de la courbe de saturation, le fluide est liquide. À droite, le fluide est gazeux. Remarque : seul le début des courbes isothermes est représenté dans les domaines situés à gauche et à lintérieur de la courbe de saturation. Cela permet dalléger le diagramme, les isothermes étant horizontales à lintérieur de la courbe de saturation et verticales à sa gauche. Document - Quelques propriétés du fluide R134a - Masse volumique aux différents points du cycle (en kg 4 m56 0 : !1 "#"$%&"""""!2 "#"$'%'""""!3 = 1,3 103 !4 = 12,5 - Ordre de grandeur de capacités thermiques massiques du R134a : cv ~ cp ~ 1 kJ. kg-1 . K-1 (ordres de grandeur valables pour la phase liquide et pour la phase vapeur) 3/16 ...0...oo UHOE... ÜêËË» &. m--Ë.OE mnmämmnäm Ë 8 - .... E ËÈ...m...Ë. <=... ?>...ËE. .....5 fin... Ë..--. mWOÊ%«OEFOENB:ÊÊ. G.. 3. G Pressure [Bar] ;. ......... . .......................L , .....Î...... .... J.. ....A.......... --h--wâ-- Ë E.. .Ës ...... FÊË ÊeËfimä ë....... EUR. ...: ...Es. Ëo EG 50 N8 umo NË wH©..Ë. wUPwo uflo.Ë .....IË .HIË HHOEo _ _ , N|Pm0 Nl0.â » c..--° .... Pad » Pwo .... È .-- une file woe© Nm: m8 ...mo w&o wmQ woec 58 ème Èo bac È...o moe wNo mË.Ë--Ë =...SË Figure 3 -- Cycle subi par le fluide Rl34a, en coordonnées Pression -- Enthalpie massique (tracé avec le logiciel CoolPack) 4/16 On rappelle l'expression du premier principe de la thermodynamique en écoulement stationnaire appliqué à un système ouvert 1 (1) ! "h #$ v 2 #$gz% &$w #$q 2 !! !'$($'sortie - hentrée est la variation d'enthalpie massique entre l'entrée et la sortie ; 1 !! ! )2 v 2 * est la variation d'énergie cinétique massique du fluide entre l'entrée et la sortie ; !! !+gz, est la variation d'énergie potentielle massique de pesanteur entre l'entrée et la sortie ; !! w est le travail massique utile, apporté au fluide par toute pièce mobile en contact avec lui ; !! q est le transfert thermique massique reçu par le fluide. On rappelle aussi l'expression du deuxième principe de la thermodynamique en écoulement stationnaire (2) !-$&$se #$sc !! !-$($-sortie - sentrée est la variation d'entropie massique entre l'entrée et la sortie ; !! s. est l'entropie massique échangée et s/ est l'entropie massique créée. On rappelle enfin la définition du titre en vapeur d'un corps diphasé liquide-vapeur 0$($ m mvap liq #1vap . Notations : les grandeurs associées à l'état 1 du cycle sont indicées "1". Les quantités échangées entre le fluide et l'extérieur au cours de la transformation 2 3 4 sont indicées par "12". Exemples : enthalpie massique h1 et travail massique utile w12 . On peut en déduire les autres notations. I.1 - Questions préalables sur le principe de fonctionnement d'une machine frigorifique Le principe d'une machine frigorifique ditherme est le suivant : « Un fluide frigorigène circule entre les différents organes de la machine. Mis en mouvement par le compresseur, ce fluide refroidit la source froide et réchauffe la source chaude. » Q1. !Donner et justifier les signes des quantités algébriques suivantes : w12 , q 23 et q 41 . Q2. !Lors de la traversée du condenseur, le fluide frigorigène a-t-il une température supérieure ou inférieure à celle de la source chaude ? Lors de la traversée de l'évaporateur, le fluide a-t-il une température supérieure ou inférieure à celle de la source froide ? Q3. !Si l'on considère le réfrigérateur que l'on possède à la maison, où se situe la source froide ? Et la source chaude ? I.2 - Questions préalables sur l'expression utile du premier principe Q4. !On considère une section de l'écoulement. En supposant les champs uniformes sur cette section, exprimer le débit de masse en fonction notamment de la vitesse d'écoulement. Q5. !D'après les données, on remarque que la masse volumique du fluide est minimale juste avant compression (état 1). En admettant que la section des canalisations est approximativement uniforme au cours du cycle, en déduire qu'en régime permanent la vitesse du fluide est maximale juste avant compression (état 1). 5/16 Q6. !La vitesse maximale au cours du cycle est de l'ordre de 1 m. s!" . En prenant comme référence la variation d'enthalpie massique au cours de la compression, en déduire que les variations d'énergie cinétique peuvent être négligées dans l'expression du premier principe de la thermodynamique. Q7. !De la même façon, justifier que le terme #$%& peut aussi être retiré de l'expression du premier principe de la thermodynamique. On utilisera par la suite l'expression simplifiée suivante du 1er principe en écoulement stationnaire : (3) '()*)w +)q . I.3 - Lecture du diagramme et intérêt de la vaporisation Pour ne pas dégrader le compresseur, il est crucial que le fluide caloporteur soit purement gazeux à l'entrée de cet organe, toute goutte de liquide entraînant son usure prématurée. C'est pourquoi le fluide à la sortie de l'évaporateur est « surchauffé » : sa température T" dans l'état 1 est supérieure à celle de la vapeur saturante Tsat #,bp &. La surchauffe est une marge de sécurité qui permet de garantir que le fluide sera bien gazeux à l'entrée du compresseur, même si le fonctionnement de la machine est perturbé. Q8. !Déterminer graphiquement la valeur numérique de la surchauffe : T1 - Tsat #,bp &. Q9. !Le fluide à la sortie du condenseur (état 3) est dit « sous-refroidi » : sa température de sortie T3 est plus basse que la température de vapeur saturante Tsat #,(- &. Déterminer graphiquement la valeur numérique du sous-refroidissement : T3 - Tsat #,(- &. Q10. ! La transformation . / 0 est une détente de Joule-Thomson. Le détendeur peut être assimilé à un simple étranglement local de la conduite. Il n'y a pas de pièce mobile et les parois sont calorifugées. Justifier que cette étape est isenthalpique. L'enthalpie massique d'un corps pur est définie par : , 4 où)2#3& est l'énergie interne massique, supposée indépendante de la pression. ()1)2#3&)+) Q11. ! Dans la zone située à gauche de la courbe de saturation, les isothermes sont verticales, donc confondues avec les isenthalpiques. Le R134a étant liquide dans cette zone, cela correspond à l'approximation usuelle stipulant que)'( 5 67 '3 pour une phase condensée. On souhaite ici vérifier la validité de cette approximation sur la première phase de la détente du R134a, avant vaporisation (du point 3 jusqu'à la courbe de saturation). Déterminer numériquement la variation de température sur cette première phase et vérifier qu'une isenthalpique est effectivement assimilable à une isotherme. 6/16 Q12. ! La suite de la détente provoque une vaporisation du R134a. Etablir qu'au cours de cette vaporisation, la variation d'enthalpie massique peut s'écrire : !"#$#L%&' (T) *!xvap #+#c' (T) , T- * (4) L%&' (.) * / "%&' (.) * , "012 (T) * étant la chaleur latente de vaporisation à la température T) et !3vap étant la variation du titre en vapeur au cours de la vaporisation. On justifiera clairement la démarche utilisée. Q13. ! Mesurer graphiquement L%&' (.) *. En déduire par le calcul une valeur numérique de la variation de température (.4 #4#.3 * attendue lors de la transformation 5 6 7. Cette valeur est-elle du même ordre de grandeur que celle lue sur le diagramme ? Conclusion : la vaporisation, provoquée mécaniquement, génère une chute de température du fluide frigorigène permettant d'orienter le transfert thermique dans le sens souhaité lors de son passage dans l'évaporateur : de la source froide vers le fluide. I.4 - Hypothèses simplificatrices et efficacité de la machine Q14. ! Quel phénomène faut-il négliger pour modéliser les échanges thermiques considérés comme étant isobares ? Q15. ! Quelles hypothèses faut-il faire pour modéliser la compression comme étant isentropique ? On rappelle la définition qualitative de l'efficacité d'une machine thermique : :;8<=>8#?@AA>BC8#CD>E8 8#/ 9:;8<=>8#?@AA>BC8#FGHD8CA89 . Q16. ! À quoi correspondent ces deux termes énergétiques dans le cas de la machine frigorifique et identifier dans le cycle la transformation associée à chacun. Déterminer leur valeur numérique par lecture graphique sur le diagramme (IJ "*. En déduire la valeur de l'efficacité. Q17. ! En appliquant à K#L= de fluide frigorigène les deux principes de la thermodynamique sur un cycle réversible, établir l'expression de l'efficacité de Carnot en fonction des températures de la source froide et de la source chaude (TF"@CM #$#NO#PQ#et TRM #$ Faire l'application numérique et comparer cette valeur à l'efficacité calculée dans le cadre du modèle étudié. Le résultat de cette comparaison était-il prévisible ? Quelles sont les sources d'irréversibilité du cycle avec lequel a été modélisée la machine frigorifique ? Q18. ! Aucune transformation réelle n'est réversible. La compression réelle qui amène le fluide de Pbp à P"T est nécessairement irréversible, contrairement à l'hypothèse simplificatrice de notre modèle. Proposer une modification simple de l'allure de la courbe K6N du diagramme (IJ "* pour tenir compte de l'irréversibilité. En déduire graphiquement une conséquence sur l'efficacité. (L'explication sera faite sur la copie.) Q19. ! Expliquer en quoi le sous-refroidissement permet d'augmenter l'efficacité de la machine, tous les autres paramètres étant gardés identiques. 7/16 II - Modélisation des vibrations générées lors du fonctionnement L'objectif de cette partie est de trouver les conditions de résonance du compresseur. Le compresseur repose sur 4 appuis élastiques. Le piston a un mouvement de translation alternatif suivant !" généré par un mécanisme bielle manivelle. Ainsi, lorsque le piston va se translater, il va créer un effort alternatif qui va générer des vibrations. Bielle Piston Accéléromètre Haut $" #" !" Accéléromètre Bas Appui élastique Figure 4 - Compresseur sur 4 appuis élastiques Analyse expérimentale à laide daccéléromètres Afin de pouvoir proposer un modèle le plus simple possible, une étude expérimentale est réalisée à laide daccéléromètres qui sont placés en haut et en bas du compresseur (figure 4). Les résultats doivent permettre deffectuer des hypothèses simplificatrices. Les courbes sont données dans le document réponse DR1. Q20. ! Tracer sur le document réponse la période des signaux X_haut et X_bas. En déduire la fréquence associée à cette période du signal observé sur les courbes. Q21. ! Le signal est assez bruité. Proposez une technique analogique et une technique numérique permettant davoir une courbe lissée. Expliquez le principe de vos solutions (sans calcul). Q22. ! En analysant les mesures daccélération du mouvement du compresseur, indiquer sur la copie en quoi leffet de la translation suivant !" est prépondérant devant celui de la translation suivant #" et celui de la rotation autour de #". Quel élément en mouvement peut expliquer cela ? Q23. ! Justifier lutilisation dune modélisation plane. Q24. ! La raideur dun des 4 appuis élastiques (modélisé comme des ressorts) suivant !" est de 20 N/mm. Calculer la raideur suivant !" du ressort équivalent aux 4 appuis en parallèle (le mouvement considéré est uniquement suivant !"). Ces hypothèses permettent de réaliser la modélisation acausale en mécanique dans le plan. 8/16 Glissièæ_Pismn--Stælor .; " , a ' 9. F o., Bu Piston Pivot_Biella_Piston b [ ' F |." B : u . a | ., ! Pivot_Rotor--Bæfle . Rotor--Wiebrequin Buelle a) modélisation acausale -----modèle --mesure accélération en ; dans l'axe du piston 0 cm 0,02 0,03 0,04 0,05 0,05 0,07 0,08 tempsen 5 Mesure effectuée à 2500 tours/min b) vue 3d du système bielle manivelle c) comparaison modèle _ mesure Figure 5 - Compresseur sur les ressorts Q25. Donner deux différences entre une modélisation causale et acausale. Q26. Le schéma (figure 5.a) n'est pas multiphysique puisqu'il ne comporte que des composants mécaniques (solides et liaisons). Faire l'inventaire des blocs « solides » et des blocs « liaisons » du modèle. Q27. À partir de la vue 3D (figure 5.b) et de la modélisation acausale (figure 5.a), proposer un schéma cinématique (en couleur) du système dans le plan (55, ÿ). Q28. Quelles sont les grandeurs de flux et les grandeurs d'effort qui vont transiter entre les blocs ? Q29. Le graphique (figure 5.c) montre la comparaison modèle--mesure au début du mouvement. Commentez l'adéquation modèle-mesures. Q30. La vitesse du moteur peut varier entre 0 et 3000 tours/min. Proposer un protocole de simulation afin de visualiser l'existence de résonances sur cette plage. 9/16 III - Consommation électrique du moteur asynchrone monophasé : une étude expérimentale Dans cette partie, une étude expérimentale du moteur asynchrone va mettre en évidence deux inconvénients du fonctionnement du compresseur sans dispositif de commande : !! lexistence dun pic de courant au démarrage ; !! un facteur de puissance dépendant de la charge. ucourant !t# i!t# Pince ampère-métrique Moteur u!t# Sonde différentielle Alternostat utension !t# Figure 6 Dispositif expérimental détude du moteur asynchrone (système dacquisition non représenté) La figure 6 représente le montage expérimental. Le moteur asynchrone est alimenté par un alternostat. Ce dernier délivre une tension sinusoïdale de fréquence 50 Hz, de valeur efficace réglable entre 0 et 220 V. La sonde différentielle délivre une tension utension !"#, représentant la tension $!"# après atténuation dun facteur 100. Cela permet denregistrer la tension délivrée au moteur sans saturer le logiciel dacquisition (LatisPro). Une pince ampère-métrique est placée en un point du circuit dalimentation et délivre une tension u%&'()*+ !"# proportionnelle au courant i!t# du tronçon de circuit autour duquel elle est placée. Le coefficient de proportionnalité vaut ,-./0 1 234 . Remarques : pour des raisons liées à lenvironnement expérimental, les tests ont été effectués à des tensions efficaces inférieures à 220 V. Par ailleurs, aucune connaissance sur le moteur asynchrone nest nécessaire pour répondre aux questions suivantes. III.1 - Pic de courant au démarrage du moteur La figure 7 (page suivante) présente un enregistrement de u%&'()*+ !"# et u+5*67&* !"# au démarrage du moteur, celui-ci nétant pas chargé. Au cours de ce régime transitoire, on observe clairement un pic en courant, qui décroît lorsque lon tend vers le régime permanent. Q31. ! Mesurer le facteur de surintensité du courant dalimentation lors du démarrage : amplitude au démarrage . amplitude en régime permanent 10/16 0,75 0,65 Enregistrement au démarrage du moteur Uoourant ------- Utension .! AVOE. || \\ \ ..."! !' A \\ -. fll| !' A Il|| [V O' A \\l ": fifi! IV llw « A A 7 - , "| ' \VI) II""- A -Hl I'll \\ |" A fl.l|| \...N -.. 5 A 1||| ru ..-: \) \) ... 'llll" IIJV n L" du! : F 8, .m ...m , s .............. m ." fl % Ü . t C ' U H, T; n Tl . m - .............. 1 || % J rJ ... . 5; 0 \ Z ll...llllllll IIIIIIIII 0 1 H ( (\ w f oe @ 9 0 -.. ........ \S) 0 m ... ......... m ... U ... ..w @ d e , .:J e T ou . ..., -::.--- M. T 8 ... r ... m ......... ...... le rm d d w , ..... & t , t ......... n ...... m m 0 .| ... m 8 -ru-u S o "b ' mu ... ........ .Il E F ..1Ù .... ......... o, ... S. n m ........ m n... U .... u _ " 1 ... .......... 1 m ... 0 O; 5 5 U 5 5 2 9 5 8 5 7 5 ..D. 5 5 8 6 4 2 1 8 6 4 2 1. O; @; ...... . 1: .... L U; 1; M; 1. clfl 1: _|, L 1: 1: O; D, U, D, A......_o> =3 Ëo...Ëoe.--. ....Ëo> :...; mco_mcw ... ...Ëo> Go.... 28589. 0.35 0,45 0,55 Temps (en 5) 0,25 0.15 Figure 7 -- Enregistrement de uoension(t) et ucouram(t) lors du démarrage du moteur non-chargé. Les deux figures du dessous sont des zooms séparés de uoension(t) et ucouram(t) 11/16 On modélise lalternostat par un générateur de Thévenin sinusoïdal. On note E lamplitude de sa tension à vide et r!" sa résistance interne. À laide de la figure 7, on peut montrer que limpédance électrique du moteur sécrit Z = - jY, où j2 #$ régime permanent, on suppose que Y,-!" (il nest pas demandé de démontrer ces affirmations). On notera que lévolution temporelle de limpédance électrique du moteur est suffisamment lente pour considérer que le régime sinusoïdal forcé est réalisé à chaque instant. Q32. ! À partir des mesures expérimentales, déterminer les valeurs numériques de E et de r!" . Q33. ! En général, lenceinte dans laquelle est placée la machine frigorifique contient plusieurs prises de courant, alimentant différents appareils. En supposant ces prises en parallèle, expliquer pourquoi il est préférable déviter le pic de courant au démarrage du moteur. Conclusion : une commande de la machine frigorifique du type « marche arrêt » génère des pics en courant qui peuvent perturber le réseau dalimentation électrique. Une commande progressive de la vitesse de rotation du compresseur permet déviter ce désagrément. Cela est étudié dans la dernière partie du sujet. III.2 - Dépendance du facteur de puissance avec la charge du moteur (régime permanent) Les trois figures nécessaires au traitement de cette partie se trouvent dans le document réponse DR2 à rendre avec la copie. La figure 13 présente un enregistrement de ucourant ./0 et utension ./0 en régime permanent, le moteur étant chargé par une génératrice à courant continu connectée à un rhéostat (résistance variable). La figure 14 est un zoom de la figure 13. La figure 15 représente le facteur de puissance cos.120 en fonction de la puissance moyenne électrique consommée par le moteur. On rappelle que 13#4#3u #%#3i est le déphasage tension-courant aux bornes du moteur. La pince ampère-métrique délivre une tension proportionnelle au courant traversant le fil dalimentation autour duquel elle a été placée. La pince peut être assimilée à une bobine torique en circuit ouvert, similaire à celle représentée sur la figure 8. Sur ce schéma, le fil dalimentation serait placé selon laxe z. Q34. ! Expliquer en quelques mots et sans calcul le principe de fonctionnement de la pince, en donnant : !! le nom et lexpression mathématique de la loi physique à lorigine du fonctionnement de la pince ; !! les différents paramètres physiques influençant le facteur de proportionnalité entre le courant mesuré et la tension délivrée. Figure 8 Schéma dune moitié de bobine torique Q35. ! Expliquer pourquoi la position de la pince ampère-métrique le long du fil dalimentation na pas dincidence sur la mesure du déphasage tension-courant. Q36. ! Donner (sans démonstration) lexpression de la puissance électrique moyenne 5P6 consommée par le moteur en fonction de lamplitude I du courant qui le traverse, de lamplitude U!"#!$%!&#'()*'!+!(#(!,*-'#(!#&!".!"/01%(%2#!34!&#'()*'56*.-%'&7! 12/16 Q37. ! À partir des figures 13 et 14, déterminer le facteur de puissance et la puissance électrique moyenne consommée par le moteur lors de cet enregistrement. On fera apparaître explicitement sur ces figures les grandeurs relevées. On précisera sur la copie les difficultés rencontrées pour extraire les données nécessaires à la détermination des deux grandeurs recherchées. La figure 15 a été tracée d'après huit autres enregistrements similaires à celui présenté sur les figures 13 et 14. Chaque point correspond à une charge différente du moteur. Plus le moteur est chargé, plus la puissance moyenne consommée est élevée. Q38. ! Ajouter sur la figure 15 le point correspondant aux mesures effectuées à la question précédente. On souhaite à présent estimer un ordre de grandeur des incertitudes de mesure sur le facteur de puissance et la puissance moyenne consommée par le moteur : !! repérer la source d'incertitude dominante sur la mesure du déphasage, puis estimer sa valeur. Donner alors l'intervalle dans lequel se trouve la valeur expérimentale de !" ; !! pour estimer l'incertitude sur cos#!"$, calculer les cosinus aux bornes de l'intervalle précédent et en déduire l'incertitude sur le facteur de puissance ; !! estimer les incertitudes relatives sur U, puis sur I ; !! en déduire la source d'incertitude principale sur la puissance moyenne ; !! en déduire l'incertitude sur la puissance moyenne ; !! finalement, dessiner les barres d'incertitudes au niveau du point ajouté sur la figure 15. Q39. ! Rappeler la raison pour laquelle le fournisseur d'énergie électrique (EDF par exemple) oblige les utilisateurs à avoir un facteur de puissance élevé. Conclusion : le facteur de puissance n'est optimal que pour une charge élevée, donc lorsque la machine frigorifique fonctionne à pleine puissance. Une commande du moteur en vitesse peut permettre d'optimiser le facteur de puissance quelle que soit la charge du moteur. IV - Commande de la variation en température L'objectif est de mettre en place une commande de variation en température de la source froide. L'objectif principal de la commande est de maintenir les sorties proches d'une valeur de consigne en température C(p) et de se stabiliser après une perturbation. L'objectif de précision est d'avoir un écart statique de 0 % après 3s pour une consigne en échelon. L'ensemble {variateur de vitesse moteur système frigorifique} sera appelé processus et se modélise par un premier ordre avec retard de constante de temps Tpro (120 s) de gain statique !"pro (1,7) et de retard T (50 s). Sa fonction de transfert est H%&'#%$ ()( S%&'#%$ MV#%$ . Le premier correcteur envisagé est un correcteur proportionnel intégral (PI) de constante de temps Ti et de gain statique K (figure 9). 13/16 C#$%& '$()#$%& K ! $1 " Ti ! p % K pro ! e !"#$%& 1 " Ti ! p Tpro ! p #T ! p + - Figure 9 Structure de la commande avec correcteur PI Q40. ! Justifier lutilisation du correcteur proportionnel intégral vis-à-vis du critère de précision. Q41. ! Donner la valeur de Ti afin de compenser le pôle dominant du processus. La courbe du document réponse DR3 montre le diagramme de Bode de la FTBO sans retard avec K = 1 et la valeur de Ti réglée à la question Q41. Q42. ! Tracer sur le document réponse DR3 la courbe de phase modifiée par le retard. Rappel : le retard est modélisé par la fonction e-T.p !"#$!%!#&!'%$&!#&$(%$)*!*(!#&*!+,%-*!.*!/012! Q43. ! Mesurer les marges de phases et de gain. Q44. ! Régler K afin davoir une marge de gain de 12 dB minimum et de phase de 45° minimum. La figure 10 montre la simulation de lévolution de la température du système pour le correcteur PI réglé dans les questions précédentes, mais aussi pour un correcteur à commande prédictive que nous étudierons par la suite car adapté à ce type dapplication. Les conditions de simulation sont un retard de 60 s, une consigne échelon de - 18 °C et une perturbation de + 5 °C à linstant t = 700 s. Figure 10 Comparaison réponse temporelle pour un correcteur PI et un correcteur prédictif Q45. ! Commenter la capacité du correcteur prédictif à atténuer la perturbation. 14/16 Les questions suivantes ont pour objectif d'analyser la programmation de la commande prédictive permettant d'obtenir le résultat de la figure 10. Le principe de la commande prédictive est de disposer d'un modèle interne qui va permettre de prédire la sortie théorique Sm(p). Cette prédiction est comparée à la sortie réelle Spre(p) et l'écart entre les deux va générer, à l'aide d'un algorithme (correcteur PFC), une nouvelle consigne MV(p). 1 " K T m ! p m Sm(p)& SP#$%& K *+,& !"#$%& pro 1 " ! T #T ! p e pro ! p '$()#$%& Figure 11 Structure de la commande avec correcteur prédictif (PFC) Pour pouvoir implanter une commande prédictive, il faut en étudier son algorithmique car le correcteur est numérique. La première étape est la simulation du modèle qui servira à la comparaison. Comme le processus se modélise selon un ordre 1, le modèle interne retenu est lui aussi d'ordre 1, %'!"#$ de fonction de transfert H!"#$% &% MV "#$ avec une constante de temps $m (120 s) et un gain statique %m (1,7 °C par point). Q46. ! Tracer sur le document réponse DR4 l'évolution de la réponse du système modélisé par un ordre 1 de gain statique 1°C par point et de constante de temps 10 s à un échelon d'amplitude de 100 points (point est l'unité numérique de commande). Le programme permettant de simuler le comportement d'un ordre 1 échantillonné est donné dans le document réponse DR4. Q47. ! Tracer le graphique obtenu à partir de cet algorithme sur la même figure que le tracé théorique de la question Q46. Le programme complet utilisant la commande PFC est donné dans le document réponse DR5 pour les questions Q48 et Q49. Comme le montre le schéma bloc figure 12, il prend en compte une saturation et une perturbation. La consigne SP(p) est un échelon de température de - 18 °C et la sortie est la température effective CV(p). 15/16 1 ! K T m m # p Sm(p)% SP'#$% ,-(% &"'#$% ("#$% O(p)% K !"#$% pro 1 ! # T "T # p e pro "% !% # p )#*+'#$% Figure 12 Schéma bloc complet Q48. ! Indiquer dans le programme les lignes qui correspondent à la saturation et à la perturbation. Quelle est lamplitude de la perturbation ? À quel instant arrive-t-elle ? On donne le résultat de lalgorithme dans le tableau 1 pour ii = 800 : SP[800] - 18 Sm[800] - 19,798 Sm[800-60] - 18,48 CV[800] - 15,64 MV[800] - 13,165 MV[800-60] - 12,27 Tableau 1 Résultats de lalgorithme pour ii=800 Q49. ! Donner les valeurs de SP[801], Sm[801], CV[801] et MV[801]. (trois chiffres significatifs.) Q50. ! Conclure sur la capacité du correcteur à atténuer une perturbation ainsi que la précision. 16/16 I M P R I M E R I E N A T I O N A L E 17 1188 D'après documents fournis FIN NE RIEN ÉCRIRE Examen ou Concours : Concours Communs Polytechniques Série* : PSI Spécialité/option : Repère de l'épreuve : Épreuve/sous-épreuve : Modélisation et Ingénierie Numérique Si votre composition comporte plusieurs feuilles, numérotez-les et placez les intercalaires dans le bon sens. (Préciser, s'il y a lieu, le sujet choisi) Appréciation du correcteur* : Note : 20 * Uniquement s'il s'agit d'un examen. PSIMI06 DOCUMENT RÉPONSE !"#$ B %&'!"!()*+,-./+$!0$1$!!$2$!3! ! #$%&'(!)*+),-*.(*! /0&11,/,)&(23.!-'24&.(!!"! 5*-'),*!+&)! /0&11,/,)356()*!%&'(7! ! #$8&-!)*+),-*.(*! /0&11,/,)&(23.!-'24&.(!!"! 5*-'),*!+&)! /0&11,/,)356()*!8&-7! ! " !""#$#%!&'()*+)*, #$% # &$% & )*+,-. !&$% )*/,0 !# !#$% !" & &$&# &$&" &$&' &$&( &$&% &+-./*+)*/ ! 9$%&'(!)*+),-*.(*! /0&11,/,)&(23.!-'24&.(!#"! 5*-'),*!+&)! /0&11,/,)356()*!%&'(7! ! 9$8&-!)*+),-*.(*! /0&11,/,)&(23.!-'24&.(!#"! 5*-'),*!+&)! /0&11,/,)356()*!8&-7! ! #$% !""#$#%!&'()*+)*, # &$% 1*+,-. & 1*/,0 !&$% !# & &$&# &$&" &$&' &$&( &$&% &+-./*+)*/ ! :$%&'(!)*+),-*.(*! /0&11,/,)&(23.!-'24&.(!$"! 5*-'),*!+&)! /0&11,/,)356()*!%&'(7! ! ! " #$% !""#$%!&'()*+)*, # &$% & !&$% & &$&# &$&" &$&' &$&( &$&% 2*+,-. !# !#$% !" &+-./*+)*/ ! ! ! ! !"#$ DR2 : Question 37 Tensions (en Volts) | 'IH | 'le p !-- N ... H ... ° ... H U" N ......n.........+..-.---o.-.qou-.ZJ canon.-fl"... . ...-nn: ......»....o"""""' : ...»....:"nu...-"'"...u.. : .::.-. : ".......ICIOCDICD'IIQIOI... % S rl...'u ""..IIIIÙDDOIICCIII " g g u...-..... ......) a %- . .-nn.l"" ?? : oui-"'... lol...-"'...l ...-n...-...un....qo0"".'..'.l. --°' Il.._ooonoouuhtnlonnnnl n-_._g- wnrlî-o... b . ...... ....- . .co.u-n-lno-.u..... lo...-"'...) ll.ll.I..ll.l....l'...... un.-Jun-...o-nocuunl""""' nl..."'...'. (."--O'Ôlollnnnonlloo' ro......o-n.n.=g... ' alu.-lib. ... |...-nnun.-ooo.........n-uol"".'- 8 nu.-«..-....n.o.n.o..u-M""' %. nic-"'. c'" : .Il-...l- .-.I.IQIII'DIICJDIIIDUDCÙ . m 0 ,un. uv ii.ï."'" ' ." [l'...-IICIIICÜÇII.IQIOO 3 ...-p.... (D ..) : ......oO'... " ..:-onpnnnnnnnuu.09nu. un.-!"...." 5 EUR. " 'U u...-un.... m' ... .......n...o.uou...nnnn. un î ' [l'...-......IDDQOIID _- : .m-n-nngonn-npu-nu 3 s m & "... "."___._..-.-nohu..un » -U nue-non......q-nnl-DO (D 'lolloooll'...- " (:«-..... â o.-....-.o.-.u.u.. .. . onp ..u- vu:noou.nonÈ-uon.uçcn : ,...--' "* ... hun-nu. no.-un..."... ou...-......uu. .- .. ...un-,....- ...-.....- { .....ionl.u--unol . rul-uouln...nnooug uno-cunn-uou'uuoou J ill... boll...lnIn'lool.nlloiloo gun-n....o-upo-...ou-...q o.n-n.--.n.o-.n.n Î. I ............p....uo.u.-... ... ...-J .........ou-u......uuiu «...-"' u...-......- ...-on...- :un.- "'-D-u-o.... y...-u......"um _" __ .....Ioclnooolllnd Figure 13 -- Enregistrement de utension (t) et ucourant (t) en régime permanent. 3/8 DR2 : Question 37 Tensions (en Volts) O W 00 (sw ua) sd...aj_ .n-ctn"'°" ... Slopo-Ü"'"" '" ' 1umnoan Figure 14 -- Zoom de la DR2 Figure 13 4/8 uo!sualn ...-.n- m : -1 0 °.". UI |.... H 0 3 m = f'.' 0 : "1 (D-- ".". 3 0 'U (D --1 3 m : t'D : P? 1? ° ° 3 V $$$$$$$$$$%&'$($)*+,-./0$1#! ! ! 2.3*4+$5!$6$"#$%&'(&)%!'*!+(),%*-!'%!$*.//(&)%!(0%)!1(!$*.//(&)%!234%&&%!)3&/322#%!$(-! 1%!23,%*-5! !"#$ ! %&'$"!()*+,-./$01!#!$%&'(&))*!+*!,-+*! ! ! ! !"#$ DR4 : Questions 46 et 47 Code Python 1 n=5 #nombre échantillon 2tf= 109#durée de la simulation 3w=[i for i in range(0,tf,tflln) l# définition du vecteur temps 4TI=IO# constante de temps du modèle 5Kn=l# gain du modèle 6Tech=tf/n;# calcul de la periode d'échantillonnage 7 an=exp( --Tech/Tm) 85n=(n)*[91 9for ii in range(n-ll: 19 snlü+11=aæs.liil+mt(1æu)*190 Code Scilab 1 nFS:.//nombre-échantillon 1:15- 100://durée - de- la - simulation w=1 : ttln: tt: - // -- définition du-- vecteur- temps 1'm=10://-- constante- dew temps- du modèle Rm=l: , //gain-du-modè1e Tech=t£/n: // - calcul - de- la -periode- d 'échantillonnage wexp (--Iech/Tm} : //constante- au fill--zero: (1,11) : » 9 to:: -- 11-1:1:n--1, 10 Sm(ii+ll=m*3m(ii)+lün* (l--an) * (10°) : //--EOdèle 11 end D--lûtflü'ùN 100 30 20 10 l I 0 10 20 30 40 50 60 70 80 90 100 7/8 DRS : Questions 48 et 49 Code Python 1 "'définition des constantes'" 2 n=1560 #nombre échantillon 3tf= lSOE#durée de la simulation 4u=[i for i in range(fl.tf,tfiln) l# définition du vecteur temps 5Tech=tfin;# calcul de la periode d'échantillonnage 6Kn=l.7; Tn=120; au=exp(-Tech/Tn); bn=1--am; 7Kp=1.7; Tp=126: ap=exp(--Techflp): bp=l-ap; & TRBF=I45; lh=1-exp( -Tech*3/TRBF) ; 9 "" initialisatim'" 16W=(n)*[61; cv=h)*lel; Su=(n)*[01; DV=(n)*[O]; SP=(n)*IOI; r=68; 11 "'Progrmtion de la c...nde prédictive'" 12 for ii in range(2+r,tf,l): 13 if ii.-(700: 14 wifi]: a 15 else: _ _ 16 DVliil=5 17 SP[iil=--18 18 s.liil=æ*sælii-11+bvxæ*nvlü-1] 19 CV[iil=ap'CVlii--ll+bp*(Kp'flVlii-1-- rl+DV[iil ) ze mliil=((svliil - (cvlül+(s--liil -soelii-d )*1) )*1h+s--lül*bæ)1(wboel 21 if mliil>20: 22 _ mliçl=ze 23 ehf HV[J_.1]<-26: 24 Whil=-ZO Code Scilab 1 //de'fini tion - des- constantes 2 n=1500: -//nombre- échantillon t£- - 1500:l/durée- de» la-- simulation w=1 : tit/n: tt: -- //-- définition- du-- vecteur temps Tech--till:: // - calcul - de- la - periode - d 'échantillonnage [th-1.7: i'm--120: mxpl--Iech/I'n) : tm=1---an; -- [(p-1.7: -1'p-120: -arexp (--1'echlïp} : -bp'l--ap: -- 8 mar--145: ' 1h'1--exp (--Tech*3lïRflï) : g //- initialisation 10 u-zerostl,tf) : -HV-u: -CV'": -Sm-u: -W'll: -SP'u: l',--60: 11 //Programation- de- la- amande-prédictive 12 for _ ii-2+r: :t£, cam--tu 13 ..,.ig.n<7oo.thean(ü)'°:> 14 ......e15eW(ii)'5:-- 15 » . - end- 15 SP(1i)-18: f/-point-de- consigne 17 CV(ii)=ap'CV(ii--l)+bp* (Rp'bN(ii--l-r)+N(ii) ) : -//--pmessus 13 &!ii)=m*âtii--l) +M*M*W(ii--l) : - //--modèle 19 HV(ii)=( (SP(11)-(W(ii)+(Sn(ii)--Sm(ii--r) )*1) )*1h+Sn(ii) *bm)/ (Rn*hn) : 20 »...-if-W(ii)>20--then-!N(ii)=20: -end 21 r----if-lN(ii)<-ZO-then-HV(11)=--20: end 22 end 8/8