
CCINP Modélisation et Ingénierie numérique PSI 2019
| Thème de l'épreuve | Optimisation de la masse d'un drone de prise de vue |
| Principaux outils utilisés | mécanique des fluides, mécanique, électrochimie, électrocinétique, induction |
| Mots clefs | drone, inductance mutuelle, accumulateur, bobine, accumulateur lithium-polymère, LiPo, drone, éléments d'inertie, modes propres, liaisons équivalentes |
Corrigé
:👈 gratuite pour tous les corrigés si tu crées un compte
👈 l'accès aux indications de tous les corrigés ne coûte que 1 € ⬅ clique ici
👈 gratuite pour tous les corrigés si tu crées un compte
- - - - - - - - - -
👈 gratuite pour ce corrigé si tu crées un compte
- - - - - - - - - - - - - - - - - - - - - - - - - - -
Énoncé complet
(télécharger le PDF)





Rapport du jury
(télécharger le PDF)
Énoncé obtenu par reconnaissance optique des caractères
SESSION 2019 C PSIMI06
CONCOURS
COMMUN
INP
ÉPREUVE SPÉCIFIQUE - FILIÈRE PSI
MODÉLISATION ET INGÉNIERIE NUMÉRIQUE
Jeudi2mai:8h-12h
N.B. : le candidat attachera la plus grande importance à la clarté, à la
précision et à la concision de
la rédaction. Si un candidat est amené à repérer ce qui peut lui sembler être
une erreur dénoncé, il le
signalera sur Sa copie et devra poursuivre sa composition en expliquant les
raisons des initiatives
qu'il a été amené à prendre.
Les calculatrices sont autorisées
Le sujet est composé de quatre parties, toutes indépendantes.
1/23
Optimisation de la masse d'un drone de prise de vue
Les drones de prise de vue sont aujourd'hui utilisés pour de nombreuses
applications professionnelles
ou ludiques : surveillance militaire ou civile, agriculture, inspection des
bâtiments et des ponts, mais
aussi pour le cinéma, la télévision ou des loisirs tels que les courses de
modèles réduits.
La plupart d'entre eux utilisent une nacelle motorisée à 2 ou 3 axes asservis
qui a pour fonction de
stabiliser les images acquises par la caméra ou l'appareil-photo embarqué. Pour
le reste, on retrouve
les composants de base d'un drone classique : structure légère en plastique ou
en carbone, moteurs
synchrones à aimants permanents (brushless) avec leur électronique de commande
et de puissance
ainsi qu'une batterie.
Figure 1 -- Drone de prise de vue avec nacelle motorisée 3 axes (modèle : DJI
Phantomd4)
Les principaux inconvénients des drones à caméra restent leur poids
(comparativement aux drones
classiques) et leur faible autonomie, de l'ordre de la dizaine de minutes. Une
réduction de la masse
permettrait des vols plus dynamiques et une consommation inférieure. Les
problématiques de réduc-
tion de masse et d'augmentation de l'autonomie sont donc liées.
L'essentiel de la masse est concentré dans les moteurs, la nacelle de la caméra
et la batterie. Une
fois les moteurs convenablement dimensionnés, les pistes d'allègement
concernent les deux derniers
éléments cités.
Le problème s'intéresse ainsi à des évolutions dont la finalité est la
réduction de la masse du drone et
est construit en quatre parties indépendantes :
la partie I s'intéresse au rapport entre la masse du drone et sa consommation
énergétique ;
la partie IT étudie une ingénieuse alternative à la lourde nacelle motorisée ;
la partie IIT porte sur les batteries Li-ion alimentant les drones et en
particulier sur l'optimisa-
tion de leurs capacités massiques ;
enfin, la partie IV explore la possibilité de se passer de batterie en lui
substituant un dispositif
d'alimentation sans fil.
Partie I - Quel rapport entre masse et autonomie ?
Objectif : déterminer la relation entre l'autonomie (en vol stationnaire) et la
masse d'un drone.
L.1 - Modélisation de la force de sustentation
La force nécessaire à la sustentation est obtenue à l'aide de plusieurs hélices
mises en rotation par
des moteurs synchrones à aimants permanents à rotor externe (moteurs brushless
outrunner). Ces
moteurs, généralement au nombre de quatre, sont placés aux extrémités d'une
structure en étoile (ou
structure étoilée) añn d'assurer la stabilité du drone. IIs sont alimentés par
une batterie via un onduleur
commandé par un système électronique d'autopilotage.
2/23
Bilans pour un fluide en écoulement permanent
J1N . v 1: . -->
On considère un fluide en écoulement permanent sous un débit massique D,,. On
note V,, pr, ea
et e,1, la vitesse, la pression, l'énergie cinétique massique et l'énergie
potentielle massique au ni-
° , -- A 7
veau de la section amont S, d'un tube de courant et V:, pr, ec et er, ces mêmes
quantités sur la
section aval S, (figure 2).
__--...
u--
i % , LT
' ' sn
1 1 % ' % + Lu
N 4 ' s ' +
'{: 12
: u 1 3 ' 2 4
'
te. i-- nos ne
cl "V : , : V
I 1 ù 1 l 9
! --+ | : l 1 C --Yà--
! 1 : : 1 ç2 1
! 1 3 a \ !
:
1. EUR "Ch ;
' 1 s \ p2
d pi 1 s : A ,
. : $ : + ?
, s ' .-
' : + dom
' ' + 9 onu"
$ + mm"
* ' AS
D am
+ + ss" 2
+ =.
mm"
Figure 2 -- Tube de courant
Un bilan d'énergie mécanique entre les sections S, et S, donne, pour un
écoulement homogène et
incompressible de masse volumique p,
Ap
P
avec P, la puissance des actions mécaniques utiles exercées par les parties
solides et P;,, celles des
actions internes au fluide. La notation Ax = x, -- x; désigne la différence
aval-amont.
De même, un bilan de quantité de mouvement permet d'obtenir
Duo = V9) = Fou (2)
avec F,... résultante des actions extérieures appliquées au système coïncidant
avec le tube de courant.
Relation Puissance-Force pour une seule hélice
Nous considérons le flux stationnaire d'air, de masse volumique p supposée
constante, mis en mou-
vement par une des hélices du drone. Une représentation schématique du tube de
courant traversant
l'hélice est proposée en figure 3, page 4. À l'entrée du tube de courant, l'air
est immobile et la pres-
sion égale à la pression atmosphérique po.
On note v, la vitesse immédiatement en sortie de l'hélice et v, la vitesse de
l'air suffisamment en aval
de l'hélice pour qu'il soit considéré à l'équilibre mécanique avec l'atmosphère
ambiante (p,; = Po).
1 ve . » , > -- e
L'hélice, balayant une section d'aire S, exerce sur l'air une force F = F 7
tout en lui cédant une
' 4 - > --> 2
puissance mécanique P, = Fv,. On note g = g7, avec g = 9,8 m/s", le champ de
pesanteur
terrestre.
3/23
ns
e* ..
\.
Sn. ..
name
nn nn nn nn nm mn nm mme c ana me am ana n en eemmnmememmenseseettt tt ee
Co
-
e
DO
-
Y
Z
Figure 3 -- Écoulement de l'air à travers l'hélice
Q1. Modélisation de l'écoulement d'air
- Justifier le choix d'une vitesse nulle à l'entrée du tube de courant (loin de
l'hélice).
- Formuler une hypothèse supplémentaire sur la nature de l'écoulement
permettant de
négliger la puissance des actions internes P;,,.
- En proposant des ordres de grandeurs cohérents de vitesse et dénivelé,
justifier qu'il est
possible de négliger, en première approche, la variation d'énergie potentielle.
Q2. En tenant compte de ces hypothèses, appliquer les relations (1) puis (2) au
système afin d'ex-
P YP PP P y
primer P,, puis F en fonction du débit massique D, et de v.. En déduire que vy
= v,/2.
1 --
Q3. Montrer que P, = ------F*", En déduire l'expression de la force Il exercée
par l'air sur
1/2pS
l'hélice, en fonction de P,,, p, S et du vecteur unitaire TZ.
I.2 - Validation expérimentale
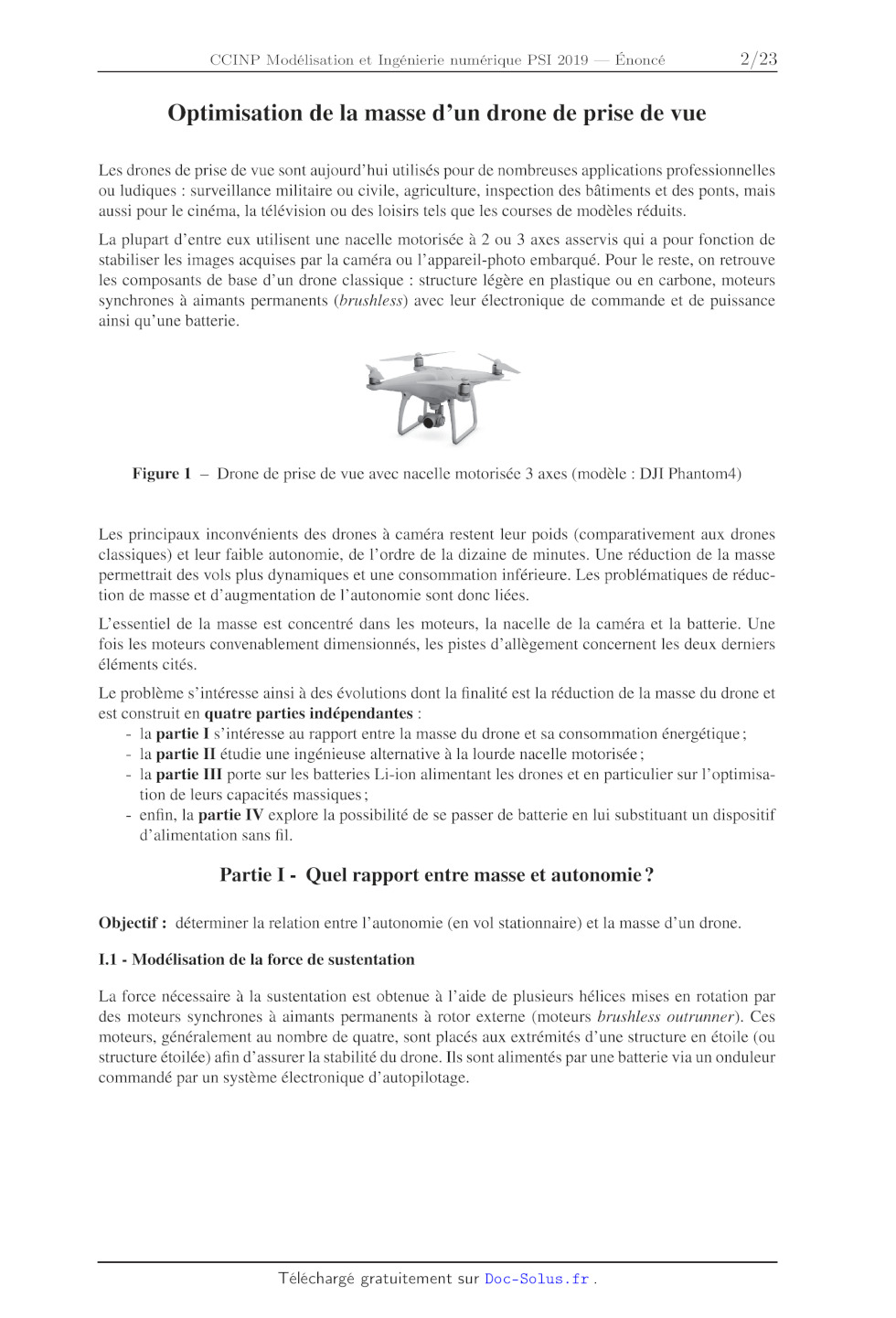
Afin de valider la relation obtenue en question Q3, des mesures expérimentales
de la force de sus-
. > D, 9 , _? . . » » . » _»
tentation IT ont été réalisées. Le dispositif expérimental est décrit et
schématisé en figure 4, page S :
le drone 1, dont un seul moteur est actif, est maintenu à un banc 0 par deux
liaisons pivots situées
en À et À', l'axe de rotation (AA) passant par le centre de gravité G de
l'aéronef miniature. On note
_; --_--_--> ----
Z0o = AA'/|JAA'||.
La branche du drone comprenant le seul moteur en fonctionnement est reliée à
une balance (faisant
office de capteur de force) par un cordon vertical 2 de masse négligeable. On
note F. = F;ÿ) la force
exercée par ce fil sur le capteur. Le point d'attache du cordon sur le drone et
celui d'application de Ii
sont supposés confondus en un même point M et II = Ily; est orthogonale au
vecteur GM = Lx. Un
défaut d'horizontalité est pris en compte et quantifié par l'angle & = (x, xi).
Le circuit d'électronique de puissance est alimenté par une source de tension
remplaçant la batterie
du drone ; l'interface utilisateur permet d'ajuster la vitesse de rotation de
l'hélice et ainsi la puissance
mécanique cédée à l'air.
Q4. Effectuer le bilan des actions mécaniques extérieures exercées sur le drone
et le cordon. En
déduire l'expression de la norme IT de la force de sustentation en fonction de
F. et de a.
4/23
Figure 4 -- Dispositif expérimental. Seules l'action de l'air sur une hélice et
la force exercée sur le
capteur sont représentées
Q5.
La force mesurée par le capteur est assimilée à la force de sustentation :
Iesurée = Fe:
Exprimer, à l'ordre 2 en @, l'erreur relative faite. Rappel du développement
limité de
2
x
cos x en 0 : cos x = 1] -- 5 + o(x°).
Sachant que le protocole expérimental assure que l'angle a ne dépasse pas 5",
estimer numé-
riquement l'écart relatif maximal (en %) et discuter de la validité du
protocole de mesure.
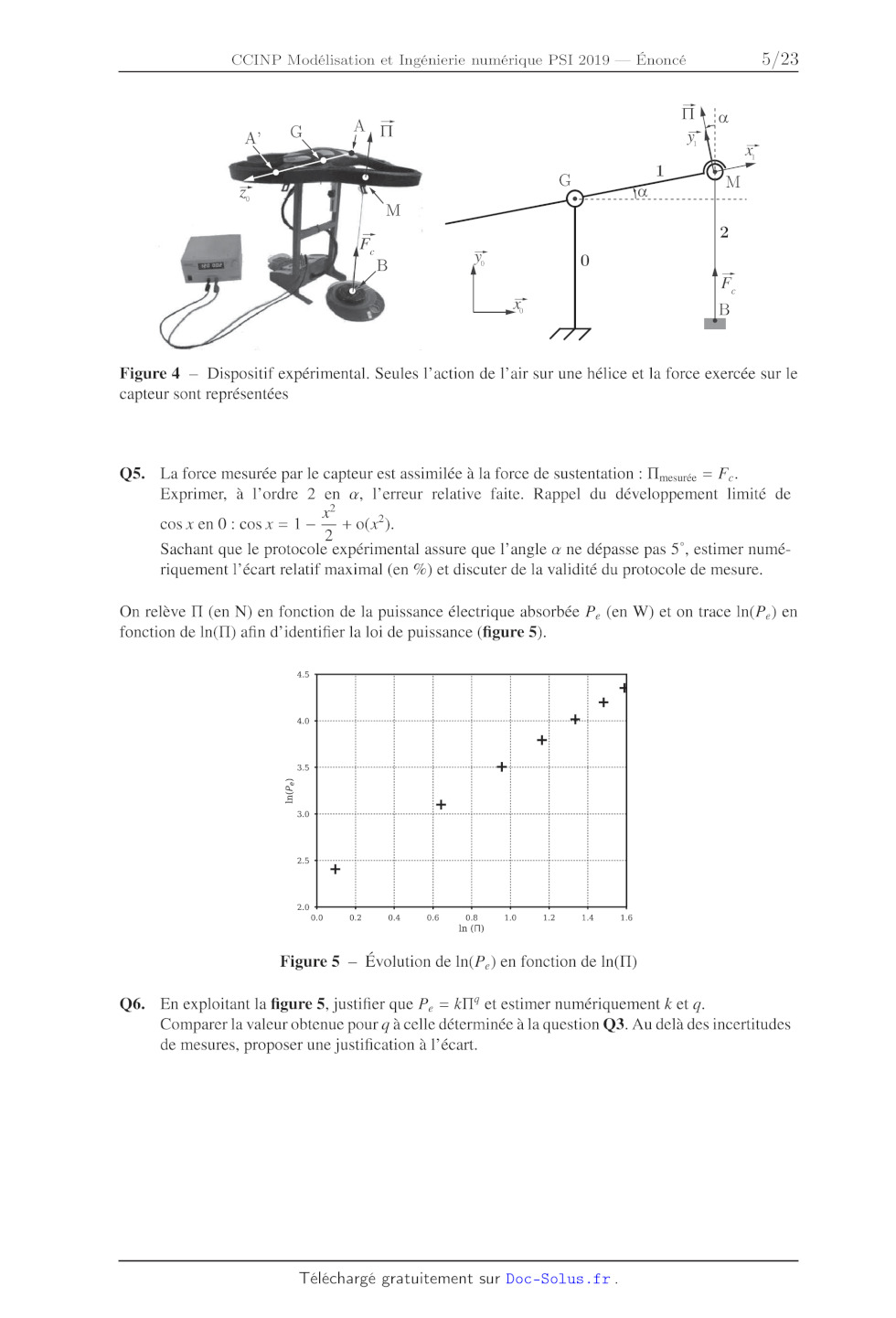
On relève IT (en N) en fonction de la puissance électrique absorbée P, (en W)
et on trace In(P,) en
fonction de In(Il) afin d'identifier la loi de puissance (figure S).
Q6.
4.5
4.0 Fe
+
3.9
In(Pe)
3.0
2.5
2.0
0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6
In (M)
Figure 5 -- Évolution de In(P,) en fonction de In(IT)
En exploitant la figure 5, justifier que P, = KIT et estimer numériquement & et
g.
Comparer la valeur obtenue pour q à celle déterminée à la question Q3. Au delà
des incertitudes
de mesures, proposer une justification à l'écart.
5/23
1.3 - Masse et autonomie en vol stationnaire
On considère un drone, de masse totale m, alimenté par une batterie de force
électromotrice U et de
capacité Q (en A:h) et disposant de quatre hélices et moteurs identiques.
Chaque moteur absorbe une
puissance P, et chaque hélice reçoit une force de norme IT, ces deux quantités
étant reliées par la
relation établie en question Q6.
On définit l'autonomie Af comme la durée d'une décharge complète de batterie
lors d'un vol station-
naire ; On Supposera que seuls les moteurs consomment de la puissance.
Q7. Exprimer P,,4, la puissance totale consommée en vol stationnaire, en
fonction de K, m, g et q.
En déduire l'autonomie Af. Faire l'application numérique pour un drone Bebop 2
de masse
m = 500 g alimenté par une batterie LiPo 3$S de tension U = 11,1 V et de
capacité
Q = 2,70 Ah. On donne g = 1,3 et k = 9,5 SI.
L'autonomie décroit donc fortement quand la masse augmente, soulignant
l'intérêt d'alléger le drone.
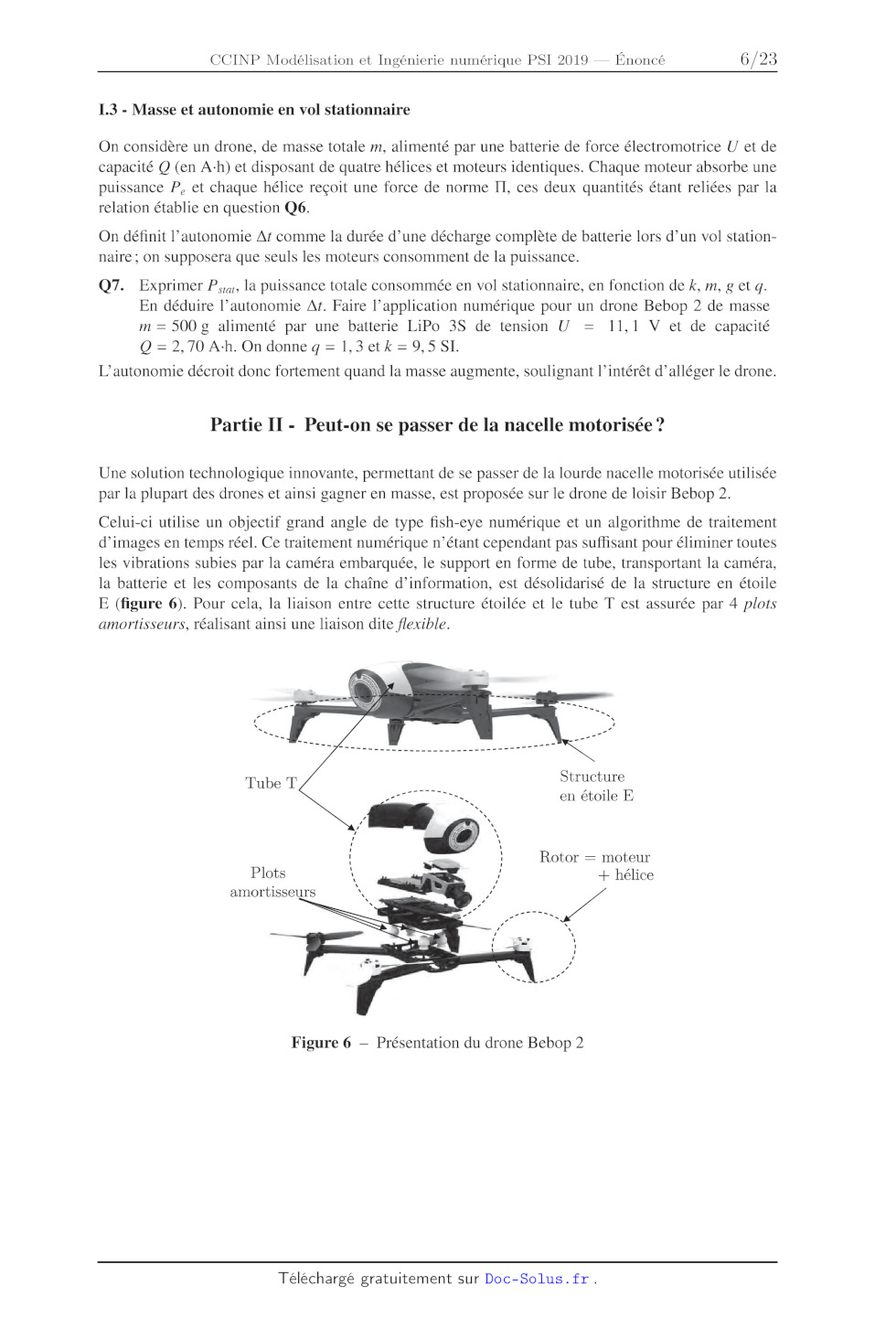
Partie II - Peut-on se passer de la nacelle motorisée ?
Une solution technologique innovante, permettant de se passer de la lourde
nacelle motorisée utilisée
par la plupart des drones et ainsi gagner en masse, est proposée sur le drone
de loisir Bebop 2.
Celui-c1 utilise un objectif grand angle de type fish-eye numérique et un
algorithme de traitement
d'images en temps réel. Ce traitement numérique n'étant cependant pas suffisant
pour éliminer toutes
les vibrations subies par la caméra embarquée, le support en forme de tube,
transportant la caméra,
la batterie et les composants de la chaîne d'information, est désolidarisé de
la structure en étoile
E (figure 6). Pour cela, la liaison entre cette structure étoilée et le tube T
est assurée par 4 plots
amortisseurs, réalisant ainsi une liaison dite flexible.
_--_--
gs _----
__--
_--...
-_
-
"7
e
_
_
_--_-- _
--_-- es LE
------ __--
Te mmmmmmmmmm--m--m--m--m------
Structure
en étoile E
Rotor = moteur
+ hélice
Figure 6 -- Présentation du drone Bebop 2
6/23
Objectif : vérifier que de simples plots amortisseurs suffisent à isoler le
tube de caméra de la structure
étoilée, source de vibrations.
IL.1 - Modes propres de la structure déformable en étoile E et exigences
Toutes les structures continues qui nous entourent (comme les ponts, les
bâtiments, les véhicules,
etc.) sont susceptibles de subir, suite à des excitations extérieures
périodiques, des phénomènes de
résonance qui apparaissent au voisinage des fréquences propres, fréquences des
oscillations libres
de la structure. Les vibrations observées aux fréquences propres sont appelées
modes propres de
déformation.
Le choix d'une structure en étoile permet de tenir éloigné du centre d'inertie
l'ensemble des axes de
poussée afin d'assurer une meilleure stabilité en vol. Néanmoins, cette
solution présente des modes
propres de déformation en basse fréquence.
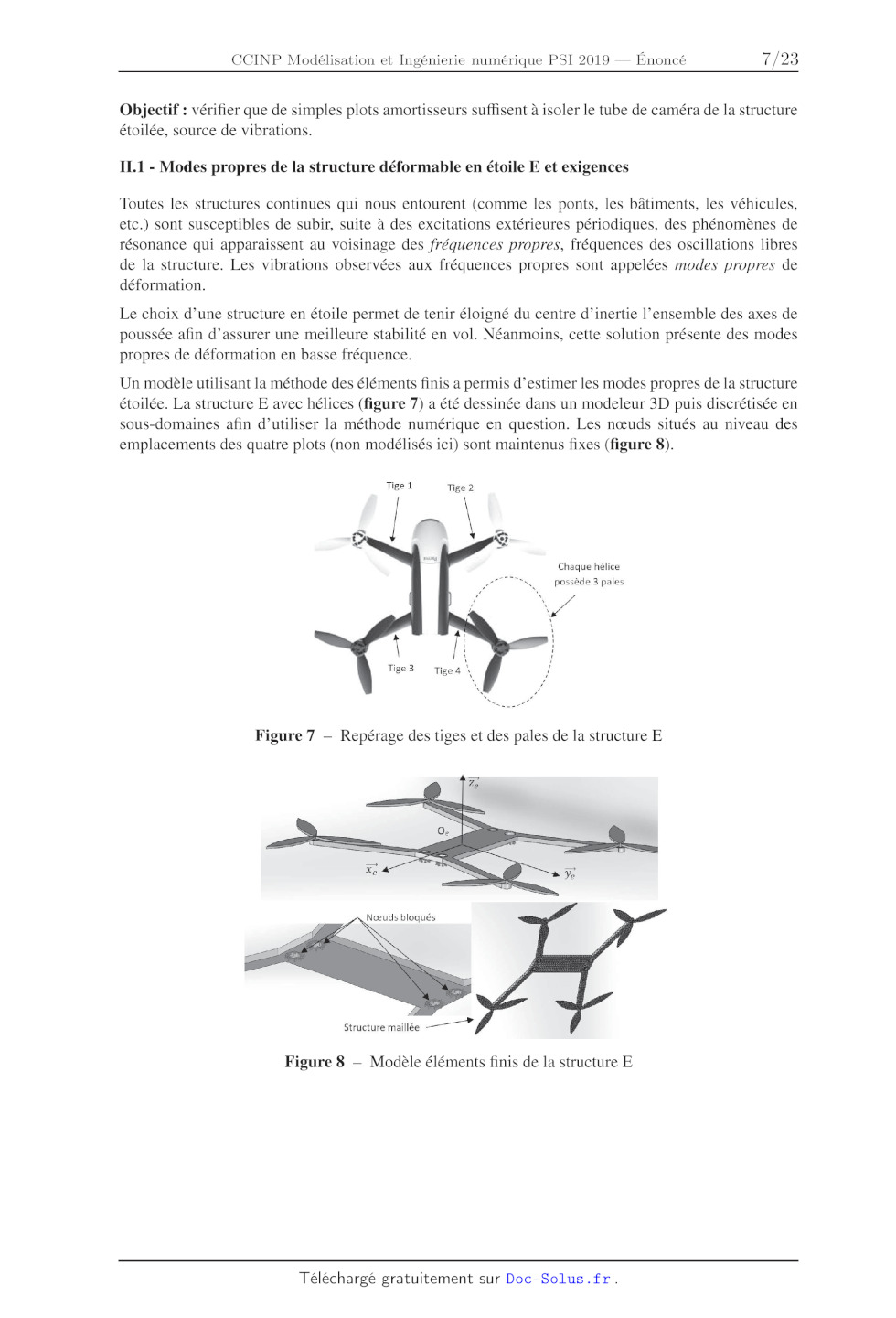
Un modèle utilisant la méthode des éléments finis a permis d'estimer les modes
propres de la structure
étoilée. La structure E avec hélices (figure 7) a été dessinée dans un modeleur
3D puis discrétisée en
sous-domaines afin d'utiliser la méthode numérique en question. Les noeuds
situés au niveau des
emplacements des quatre plots (non modélisés 1c1) sont maintenus fixes (figure
8).
Tige 1 Tige 2
Chaque hélice
possède 3 pales
Structure maillée ge
Figure 8 --- Modèle éléments finis de la structure E
7/23
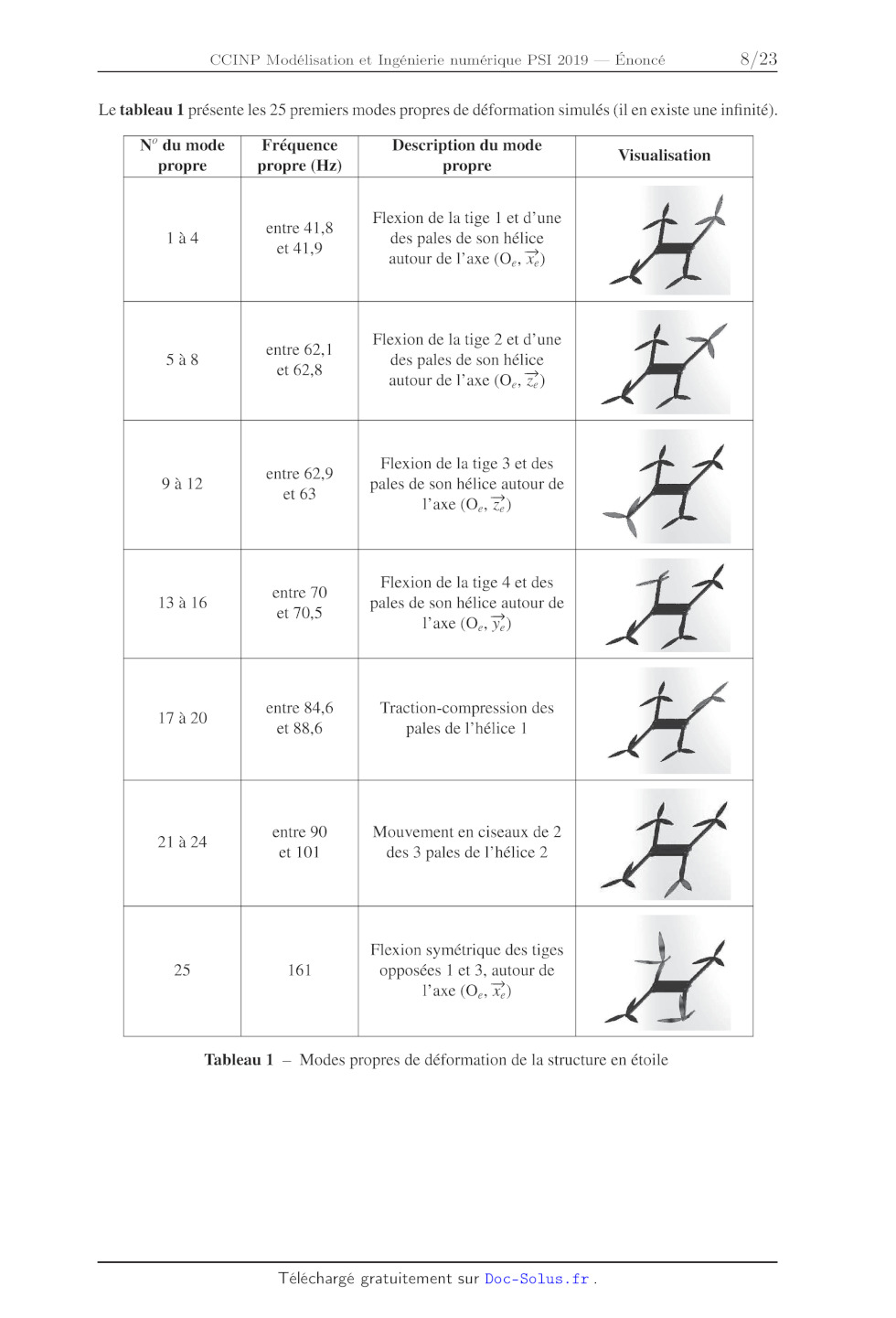
Le tableau 1 présente les 25 premiers modes propres de déformation simulés (il
en existe une infinité).
N° du mode Fréquence Description du mode .
Visualisation
propre propre (Hz) propre
| entre 41.8 Flexion de la tige 1 et d une
Ï à 4 etALO des pales de son hélice
| autour de l'axe (O,, X)
| entre 62,1 Flexion de la tige 2 et d une
5 à8 et 628 des pales de son hélice
| autour de l'axe (O,, Z)
| entre 62.9 Flexion de la tige 3 et des
9à 12 pales de son hélice autour de
et 63 , --
l'axe (O,, z:)
entre 70 Flexion de la tige 4 et des
13 à 16 pales de son hélice autour de
et 70,5 , --
l'axe (O,, y.)
17 à 20 entre 84,6 Traction-compression des
et 88,0 pales de l'hélice 1
21 à 24 entre 90 Mouvement en ciseaux de 2
et 101 des 3 pales de l'hélice 2
Flexion symétrique des tiges
25 161 opposées | et 3, autour de
l'axe (O,, x)
Xe 2
Tableau 1 -- Modes propres de déformation de la structure en étoile
8/23
Ces modes propres de déformation de E prennent naissance à partir de
sollicitations cycliques. Ces
dernières sont multiples : déséquilibrage statique et dynamique des rotors,
couplage air-hélices, etc.
Un extrait du cahier des charges est donné dans Île tableau 2 :
Id Nom Texte
La fréquence de rotation des rotors ne doit pas excéder
Plage |
1.2 ee E® 6 000 tours/min. Le vol stationnaire doit correspondre à une
d'utilisation h .
fréquence de rotation des rotors de 4 500 tours/min.
Sources Les sollicitations cycliques agissant sur le drone ne doivent pas
1.3 L perturber la caméra embarquée dans la plage d'utilisation de
vibratoires
celui-ci.
Tableau 2 -- Tableau des exigences
Cet extrait du cahier des charges se traduit comme suit : la plage
d'utilisation du drone impose une
plage de fréquence de rotation des rotors située entre 0 et 100 Hz. Ainsi, afin
que la caméra (située
dans le tube T) ne ressente pas les sollicitations cycliques dans cette plage,
1l est primordial de s'as-
surer que les fréquences propres du tube n'interfèrent pas avec celles de la
structure en étoile. Si c'est
le cas, on parle de couplage.
La suite du sujet consistera à élaborer des modèles permettant d'estimer les
fréquences propres du
tube et de vérifñer s1 celles-c1 se situent loin des fréquences des modes
propres de la structure étorlée
présentés dans le tableau I.
IL.2 - Modélisation des plots amortisseurs
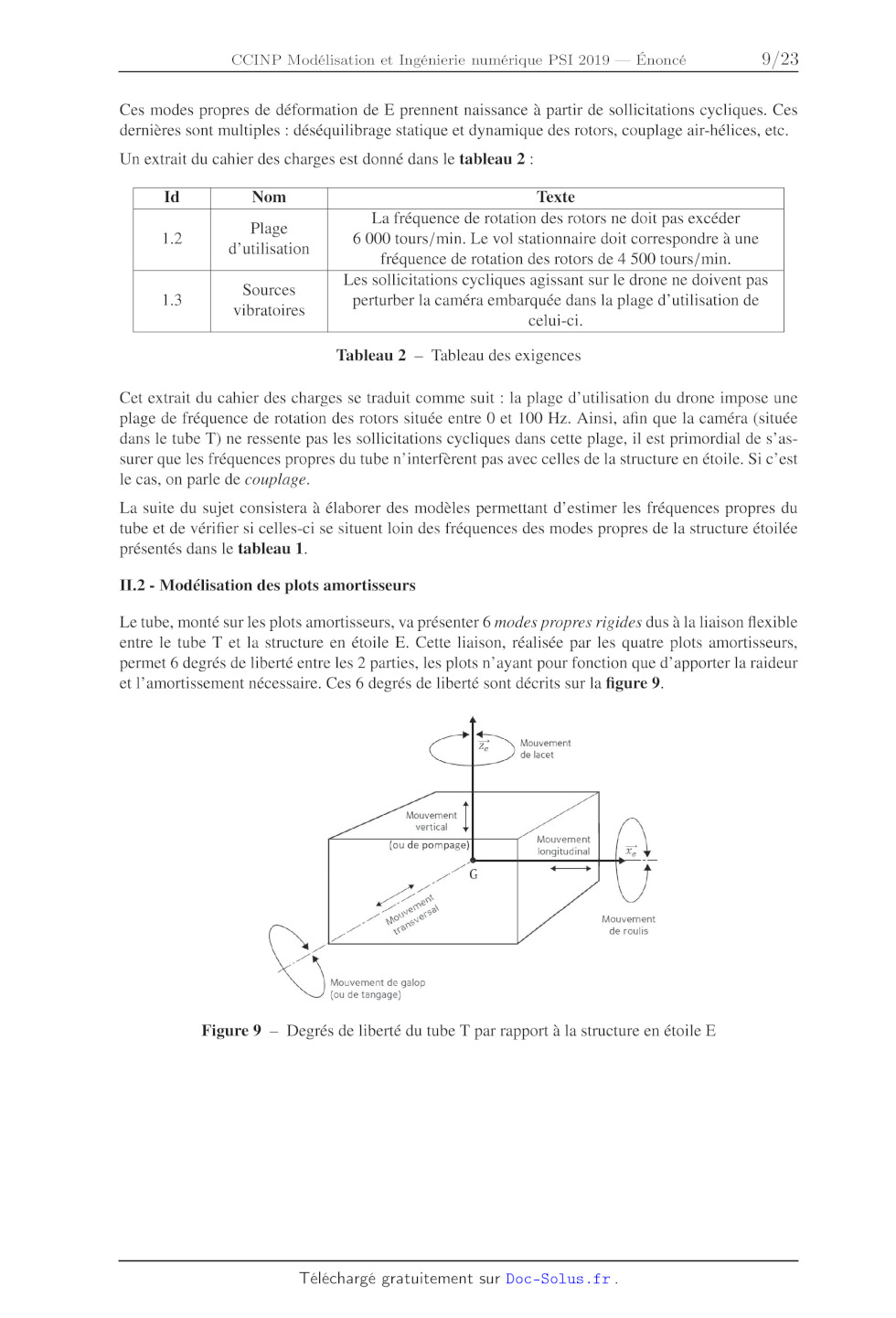
Le tube, monté sur les plots amortisseurs, va présenter 6 modes propres rigides
dus à la liaison flexible
entre le tube T et la structure en étoile E. Cette liaison, réalisée par les
quatre plots amortisseurs,
permet 6 degrés de liberté entre les 2 parties, les plots n'ayant pour fonction
que d'apporter la raideur
et l'amortissement nécessaire. Ces 6 degrés de liberté sont décrits sur la
figure 9.
A
A Mouvement
e
de lacet
Mouvement
vertical
{ou de pompage) Mouvement
POMPeE longitudinal ke
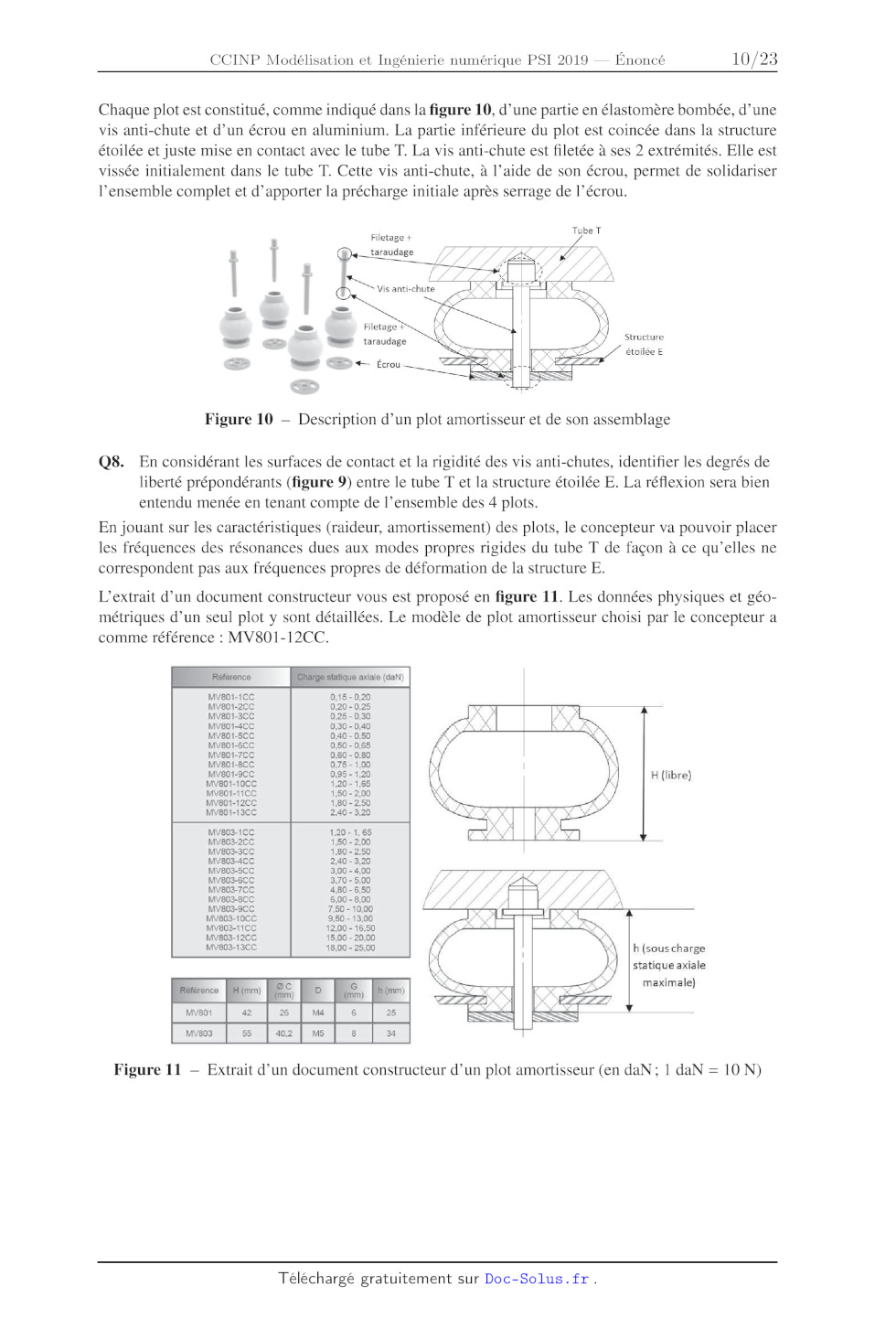
el < » _ 7 G 7 27 LS TT AO ° Mouvement vu? de roulis PA Mouvement de galop (ou de tangage) Figure 9 -- Degrés de liberté du tube T par rapport à la structure en étoile E 9/23 Chaque plot est constitué, comme indiqué dans la figure 10, d'une partie en élastomère bombée, d'une vis anti-chute et d'un écrou en aluminium. La partie inférieure du plot est coincée dans la structure étoilée et juste mise en contact avec le tube T. La vis anti-chute est fletée à ses 2 extrémités. Elle est vissée initialement dans le tube T. Cette vis anti-chute, à l'aide de son écrou, permet de solidariser l'ensemble complet et d'apporter la précharge initiale après serrage de l'écrou. | Tube T Filetage + taraudage oo -- Fr Filetage + -- . MN taraudage Structure étoilée E =" CD <-- Écrou Figure 10 -- Description d'un plot amortisseur et de son assemblage Q8. En considérant les surfaces de contact et la rigidité des vis anti-chutes, identifier les degrés de liberté prépondérants (figure 9) entre le tube T et la structure étoilée E. La réflexion sera bien entendu menée en tenant compte de l'ensemble des 4 plots. En jouant sur les caractéristiques (raideur, amortissement) des plots, le concepteur va pouvoir placer les fréquences des résonances dues aux modes propres rigides du tube T de façon à ce qu'elles ne correspondent pas aux fréquences propres de déformation de la structure E. L'extrait d'un document constructeur vous est proposé en figure 11. Les données physiques et géo- métriques d'un seul plot y sont détaillées. Le modèle de plot amortisseur choisi par le concepteur a comme référence : MV801-12CC. Référence Charge statique axiale (daN) MV801-1CC 0,15 - 0,20 MV801-2CC 0,20 - 0,25 à MV801-3CC 0,25 - 0,30 MV801-4CC 0,30 - 0,40 MV801-5CC 0,40 - 0,50 MV801-6CC 0,50 - 0,65 MV801-7CC 0.60 - 0,80 MV801-8CC 0,75 - 1,00 MV801-9CC 0.95 - 1,20 H (libre) MV801-10CC 1,20 - 1,65 MV801-11CC 1,50 - 2,00 MV801-12CC 1,80 - 2,50 MV801-13CC 2,40 - 3,20 MV803-1CC 1,20 - 1,65 MV803-2CC 1,50 - 2,00 MV803-3CC 1,80 - 2,50 MV803-4CC 2,40 - 3,20 MV803-5CC 3,00 - 4,00 MV803-6CC 3,70 - 5,00 MV803-7CC 4,80 - 6,50 MV803-8CC 6,00 - 8,00 MV803-9CC 7,50 - 10,00 à MV803-10CC 9,50 - 13,00 MV803-11CC 12.00 - 16,50 MV803-12CC 15,00 - 20.00 MV803-13CC 18,00 - 25,00 h (sous charge statique axiale oc G maximale) | Référence | Himm) (mm) | D | (mm) | h(mm) | MV801 | 42 | 26 | M4 | 2 25 v | MV803 | 55 | 40,2 | M5 | 8 34 FT Figure 11 -- Extrait d'un document constructeur d'un plot amortisseur (en daN ; 1 daN = 10 N) 10/23 Q9. Pour le seul plot amortisseur en question, déduire du document constructeur présenté la course que celui-ci atteindra sous charge statique axiale maximale. En déduire la valeur numérique (en N/m) de la constante de raideur £ d'un plot amortisseur. IL3 - Analyse d'un modèle de connaissance à 1 degré de liberté On s'intéresse ici au seul mode propre de pompage qui correspond au mouvement de translation rectiligne verticale du tube T par rapport à E (figure 9). Afin de déterminer la fréquence de résonance associée, nous pouvons associer l'ensemble {T + plots} ° A7 . e .. » . . . -->
à un modèle masse-ressort-amortisseur élémentaire sollicité par une excitation
verticale f (f).
On donne la raideur et le coefficient de frottement visqueux d'un seul plot : k
= 1,5 kKN/m et
c = 1,0 kg/s, les frottements visqueux étant supposés linéaires en vitesse.
Q10. Donner, sans justifications, les expressions et valeurs numériques de la
raideur équivalente K
et du coefficient de frottement équivalent C de l'association de 4 plots
amortisseurs.
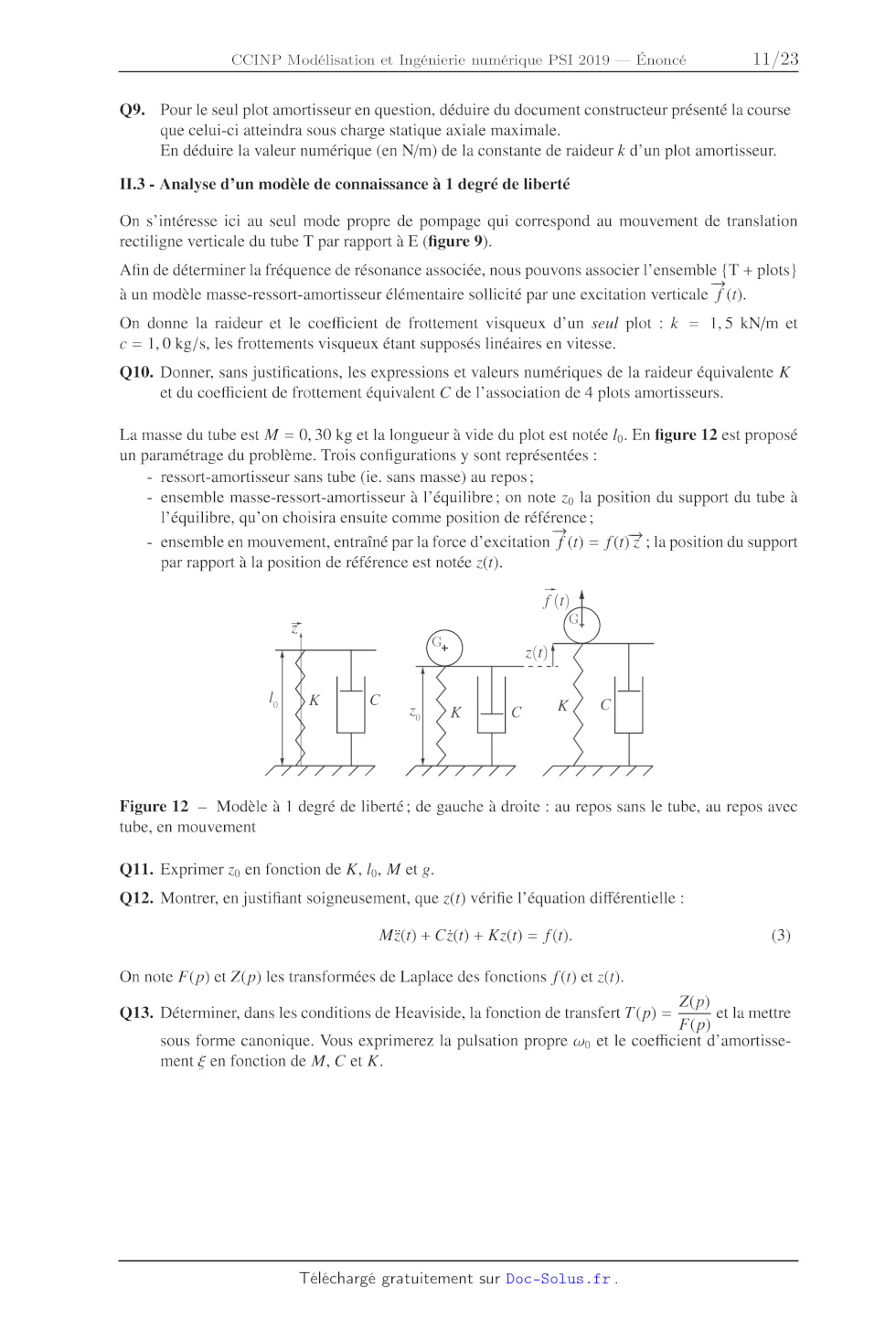
La masse du tube est M = 0, 30 kg et la longueur à vide du plot est notée l,.
En figure 12 est proposé
un paramétrage du problème. Trois configurations y sont représentées :
- ressort-amortisseur sans tube (ie. sans masse) au repos ;
- ensemble masse-ressort-amortisseur à l'équilibre ; on note z, la position du
support du tube à
l'équilibre, qu'on choisira ensuite comme position de référence ;
--> CC
- ensemble en mouvement, entraîné par la force d'excitation f (f) = f(t)2 ; la
position du support
par rapport à la position de référence est notée z(f).
Fo
z
Ge) zu
> À a
( L
LI DK C
' d | DK c Ke
)
\
JITTTTIT JTITTTTIT J'lll ll
Figure 12 --- Modèle à 1 degré de liberté ; de gauche à droite : au repos sans
Île tube, au repos avec
tube, en mouvement
Q11. Exprimer z, en fonction de K, lo, M et g.
Q12. Montrer, en justifiant soigneusement, que Zz(f) vérifie l'équation
différentielle :
ME) + CZ(E) + KZ?) = f(?). (3)
On note F(p) et Z(p) les transformées de Laplace des fonctions f(?) et z(f).
Z(p)
F(p)
sous forme canonique. Vous exprimerez la pulsation propre w, et le coeflicient
d'amortisse-
ment & en fonction de M, C et K.
et la mettre
Q13. Déterminer, dans les conditions de Heaviside, la fonction de transfert
T'(p) =
11/23
On montre que la pulsation de résonance w, est liée à w0 par la relation
suivante : w, = w9 V1 -- 2EUR.
Q14. Quantifier l'influence de l'amortissement apporté par les plots
amortisseurs sur la pulsation
de résonance. Quels sont donc les seuls paramètres physiques permettant au
concepteur de
positionner la résonance du mode rigide de pompage ?
IL.4 - Analyse d'un modèle de connaissance à 3 degrés de liberté
Modélisation de la solution à 3 degrés de liberté
Le but est de construire 1c1 un modèle de connaissance qui permettra d'estimer
3 des fréquences
propres de vibration rigide du tube T supportant la caméra. Comme 1l à été
précédemment démontré
que l'amortissement apporté par les plots amortisseurs avait peu d'influence
sur la position de ces
fréquences propres, ces derniers ne seront modélisés que par des ressorts.
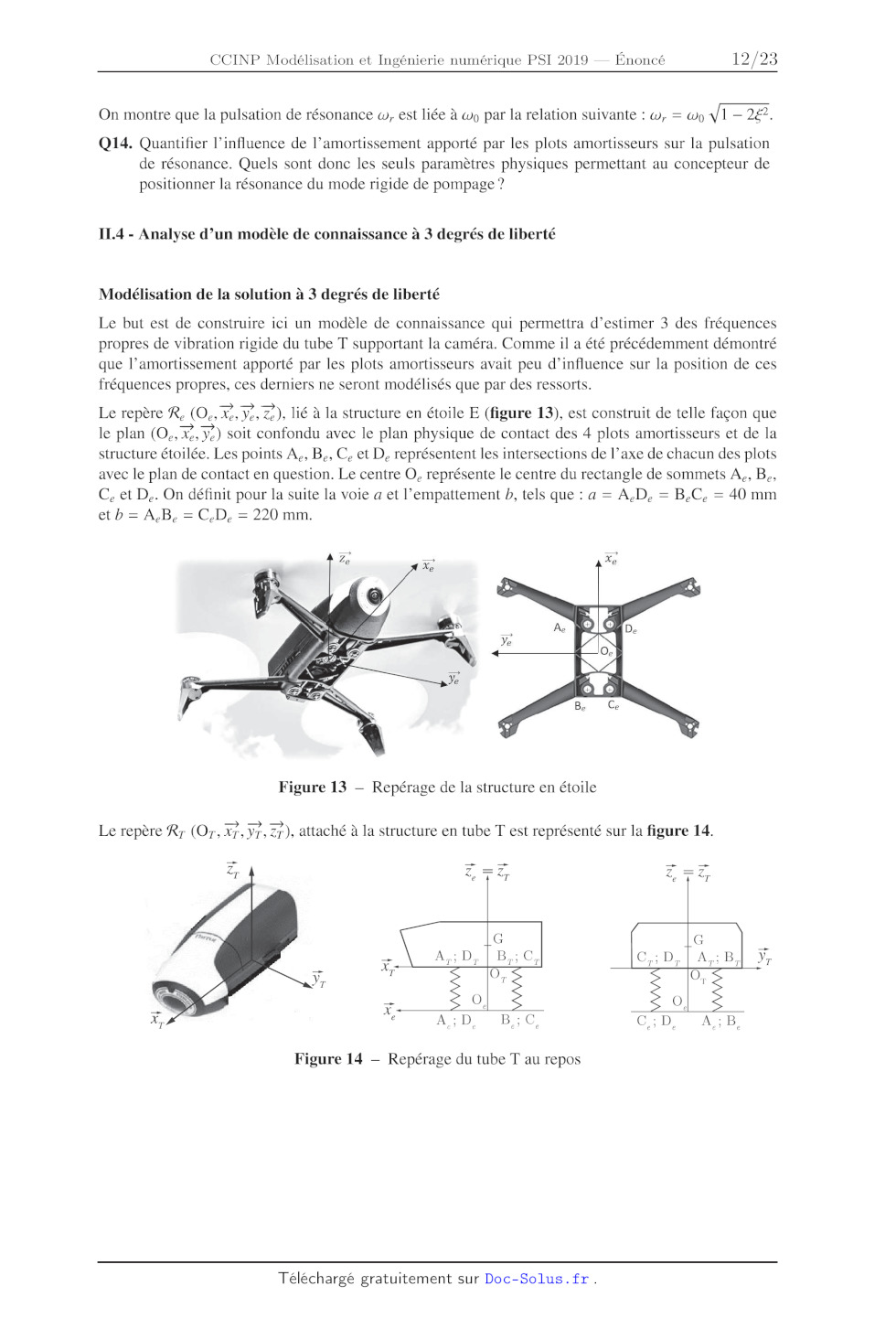
Le repère K, (O,, x, y, 2), lié à la structure en étoile E (figure 13), est
construit de telle façon que
le plan (O,, x, y) soit confondu avec le plan physique de contact des 4 plots
amortisseurs et de la
structure étoilée. Les points À,, B,, C, et D, représentent les intersections
de l'axe de chacun des plots
avec le plan de contact en question. Le centre O, représente le centre du
rectangle de sommets À,, B.,
C, et D,. On définit pour la suite la voie a et l'empattement b, tels que : a =
A,D, = B,C, = 40 mm
et b = A,B, = CD, = 220 mm.
Figure 13 -- Repérage de la structure en étoile
k -- > -- ZX / /
Le repère Rr (Or, xr, yr, zr), attaché à la structure en tube T est représenté
sur la figure 14.
Z, T £r £, T LT
Figure 14 -- Repérage du tube T au repos
12/23
Au repos, les plans (O,, x, 2) et (Or, X7., Yr) sont parallèles et distants de
z1 = O,07 et les deux
\ A . -- --? . L .
repères partagent le même axe vertical z, = zr. Les points A7, Br, Cr et D7
représentent les intersec-
tons de l'axe de chacun des plots avec le plan de contact de ces derniers et la
partie inférieure du tube
T'et Or est le centre du rectangle de sommets Ar, Br, Cr et D-. En conséquence
de l'étude menée
dans la sous-partie IL.2, on peut considérer que O reste situé sur l'axe (O,,
2). G est le centre de
masse de la structure T que l'on supposera sur l'axe (0,07) au repos.
Afin de décrire le mouvement du tube, on utilise les paramétrages proposés sur
la figure 15 :
- les degrés de rotation autour de l'axe y> (axe de tangage) et autour de l'axe
x7. (axe de roulis)
sont décrits par les deux angles d'Euler v et 0 et par le repère R (Or, ü, V,W)
- Je degré de translation suivant l'axe z? (mouvement de pompage) est
paramétré, comme dans la
sous-partie IL.3, par la longueur z(f), définie par rapport à la position de
référence 2.
£, 7 £r
-- Le F W" ,
W Zr À G :
D N Vr
O(r) 1: _
(#) a + Le
d Yr 40 G © Xe
le = (00) to è è
(#)_A = Y
u / CD, A,5B,
Tangage Roulis Pompage
Figure 15 -- Paramétrages angulaires et linéaire
L'allongement relatif étant très faible, on se place dans l'hypothèse de petits
déplacements : Z(t) EUR 20,
O(r) EUR 1 et o(r) EUR I.
Modélisation de l'action des plots amortisseurs sur le tube T
L'action du plot A sur le tube T peut être modélisée par un glisseur au point
A. (figure 16, page 14).
La composante dynamique de sa résultante (1e. résultante privée de la
composante statique compen-
sant le poids) s'exprime par :
------
2 A AT
R oiot AT = K (IAA? - 20) TT.
IAA?
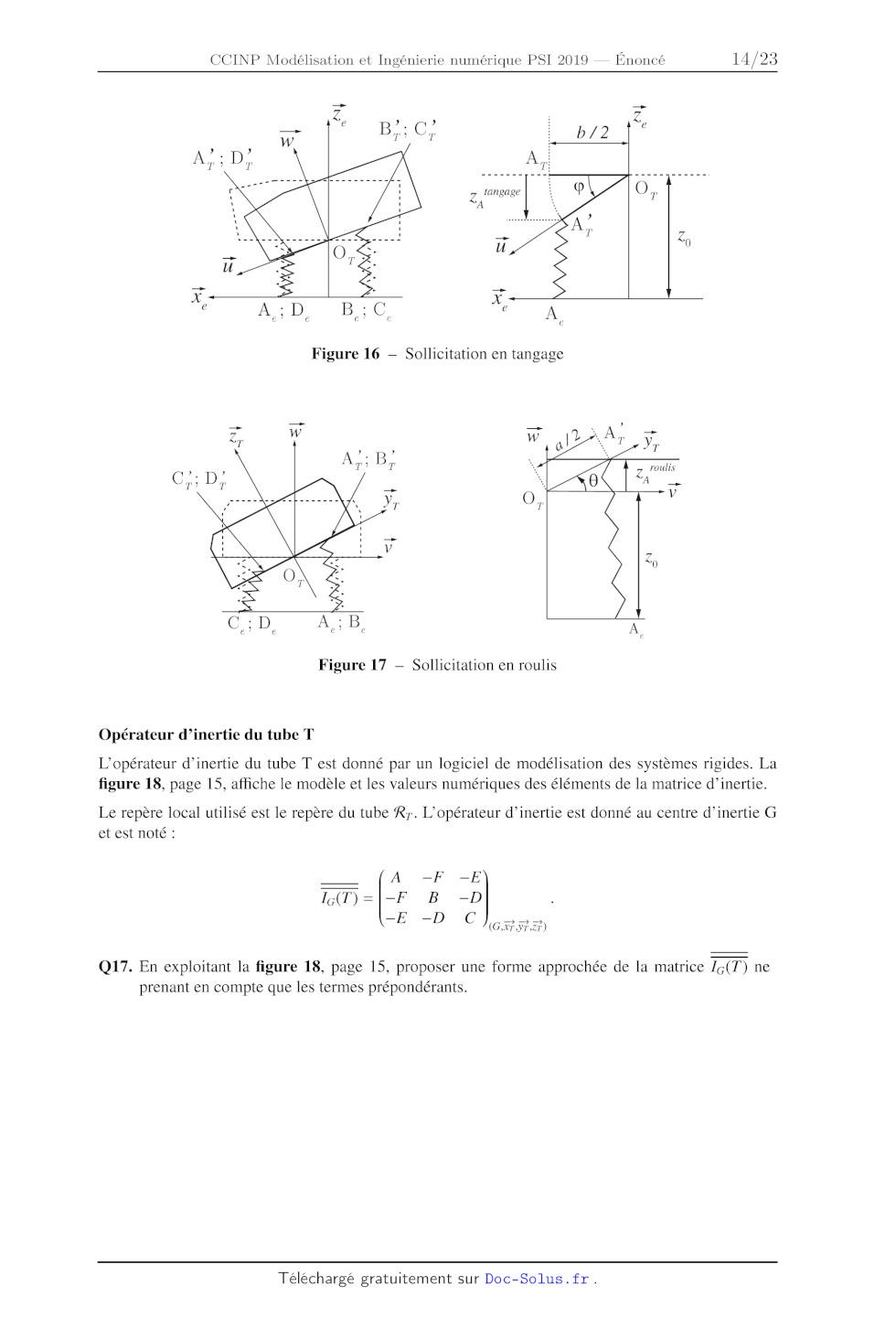
Sur les figures 16 et 17, page 14, sont schématisés les déplacements du point
de contact A, en
sollicitation de tangage ou de roulis.
Langage roulis
Q15. Exprimer, sous l'hypothèse de petits angles, z, etz, en fonction de a, b,
6 et @.
Q16. Montrer, en justifiant soigneusement, que la résultante peut s'exprimer,
toujours dans le cadre
Lo _ _, a
de petits déplacements : R jot A-T = -- À ZaZe AVEC Z4 = z + 50 : 5.
On peut, de la même manière, déterminer les actions exercées par les autres
plots.
13/23
À
b/2.
À;
DS eee
tangage P O0,
LA ,
M )
_ Ây Z
ll 0
> --- \l
X =
. e
BC, A.
Figure 16 -- Sollicitation en tangage
--- W > A A ? ---
Zr À wW A a , Lu y T
A': B, | 7
, , TI T 2 À Z roulis
Cyr; D; _ À, 0 A --
TT ee Yr O, À V
_V
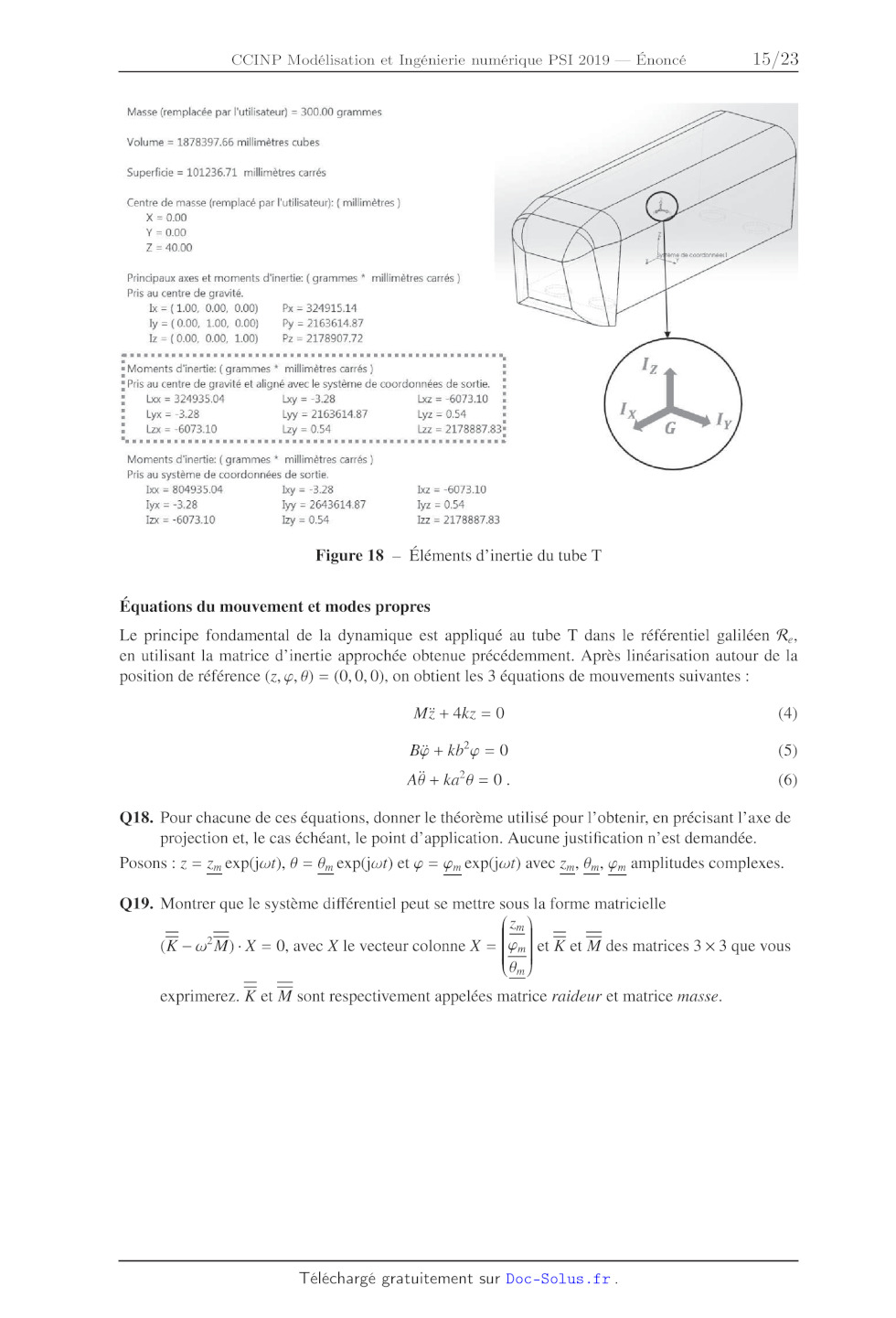
> | <0 Z Y e ? B, Â Figure 17 -- Sollicitation en roulis Opérateur d'inertie du tube T L'opérateur d'inertie du tube T est donné par un logiciel de modélisation des systèmes rigides. La figure 18, page 15, afñche le modèle et les valeurs numériques des éléments de la matrice d'inertie. Le repère local utilisé est le repère du tube R7. L'opérateur d'inertie est donné au centre d'inertie G et est noté : A --F -E IT) =|-F B -D | LE =D C}) >
(G,XT,YT,2T)
Q17. En exploitant la figure 18, page 15, proposer une forme approchée de la
matrice ZG(T) ne
prenant en compte que les termes prépondérants.
14/23
Masse (remplacée par l'utilisateur) = 300.00 grammes
Volume = 1878397.66 millimètres cubes
Superficie = 101236.71 millimètres carrés
Centre de masse (remplacé par l'utilisateur): ( millimètres )
X = 0.00
Y = 0.00
Z = 40.00
Principaux axes et moments d'inertie: ( grammes * millimètres carrés )
Pris au centre de gravité.
Ix = (1.00, 0.00, 0.00) Px = 324915.14
ly = (0.00, 1.00, 0.00) Py = 2163614.87
Iz = (0.00, 0.00, 1.00) Pz = 2178907.72
&
= Moments d'inertie: ( grammes * millimètres carrés )
a
* Pris au centre de gravité et aligné avec le système de coordonnées de sortie.
" Lxx = 324935.04 Lxy = -3.28 Lxz = -6073.10
"_ Lyx = -3.28 Lyy = 2163614.87 Lyz = 0.54 :
=: Lzx = -6073.10 Lzy = 0.54 Lzz = 2178887.83"
Moments d'inertie: ( grammes * millimètres carrés )
Pris au système de coordonnées de sortie.
Ex = 804935.04 Ixy = -3.28 Ixz = -6073.10
Iyx = -3.28 lyy = 2643614.87 [yz = 0.54
[zx = -6073.10 Izy = 0.54 [zz = 21/8887.83
Figure 18 -- Éléments d'inertie du tube T
Équations du mouvement et modes propres
Le principe fondamental de la dynamique est appliqué au tube T dans le
référentiel galiléen K,,
en utilisant la matrice d'inertie approchée obtenue précédemment. Après
linéarisation autour de la
position de référence (z, w, 0) = (0, 0, 0), on obtient les 3 équations de
mouvements suivantes :
M + 4kz = 0 (4)
Bÿ + kb' = 0 (5)
AÛ + ka°0 = 0. (6)
Q18. Pour chacune de ces équations, donner le théorème utilisé pour l'obtenir,
en précisant l'axe de
projection et, le cas échéant, le point d'application. Aucune justification
n'est demandée.
Posons : Z = Zn EXp(Jwf), 0 = Ün Exp(wf) et 6 = En EXP(Jwf) avec Z», Om; Pm
AMplitudes complexes.
Q19. Montrer que le système différentiel peut se mettre sous la forme
matricielle
_ --_ Zm | 7
(K -- w°M) - X = 0, avec X le vecteur colonne X = Pm | et K et M des matrices 3
x 3 que vous
On
exprimerez. K et M sont respectivement appelées matrice raideur et matrice
masse.
15/23
Un tel système n'a de solution non nulle que si son déterminant est nul : det
EG = M) D
(OPEN TN ENS ESTONIE INATTENDUE EEE Te EEE
oO ET CA RENTE CONDUITE AE _ avec i = {z,@, 6).
T
Q21. On donne les valeurs numériques des fréquences propres de pompage et de
roulis :
f: = 22,5 Hz et fs = 13,7 Hz. Calculer la valeur numérique de la fréquence
propre de tan-
ÉCECE PE
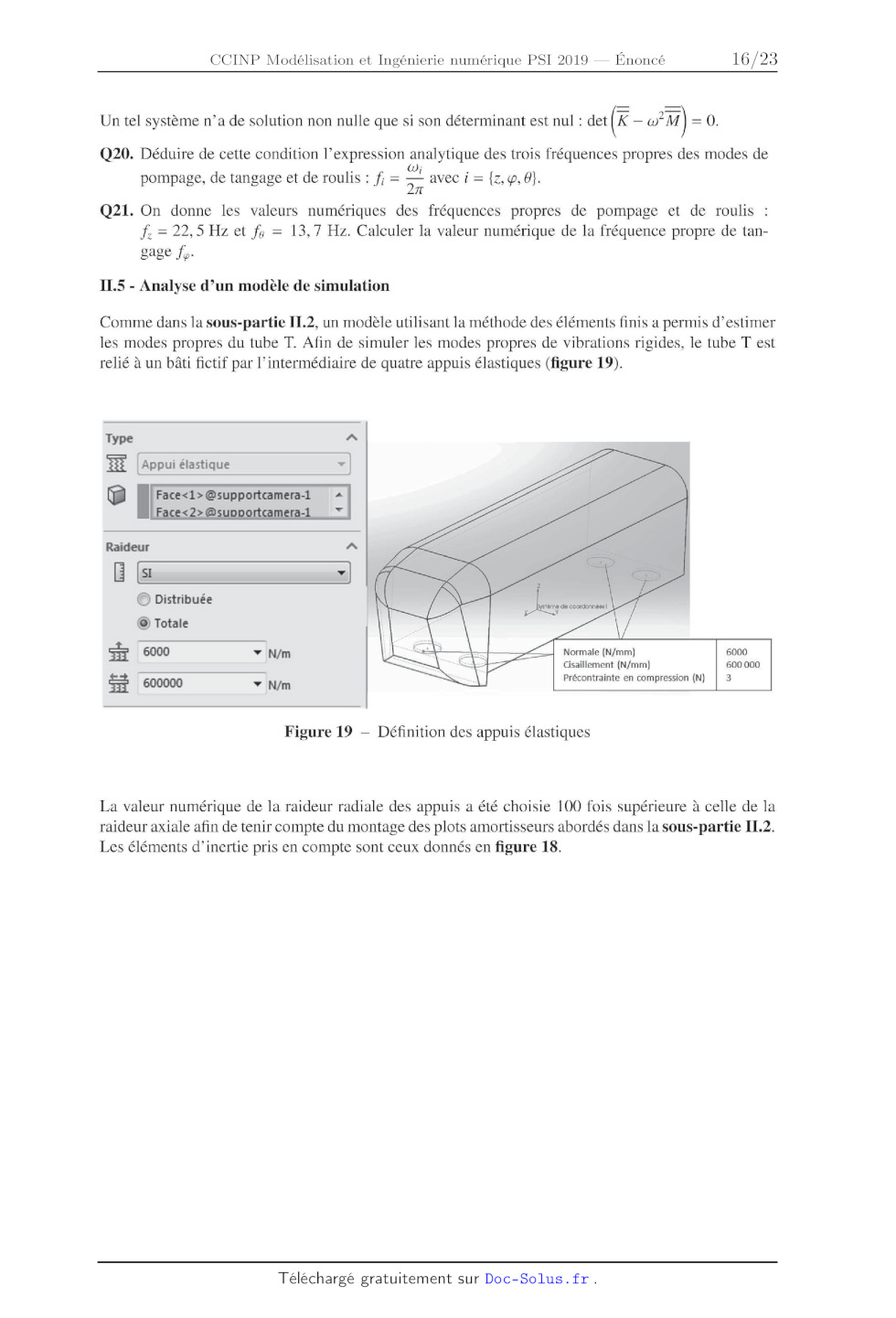
ILS - Analyse d'un modèle de simulation
Comme dans la sous-partie IL.2, un modèle utilisant la méthode des éléments
finis a permis d'estimer
les modes propres du tube T. Afin de simuler les modes propres de vibrations
rigides, le tube T est
relié à un bâti fictif par l'intermédiaire de quatre appuis élastiques (figure
19).
Type Pa
Æ ET élastique
@ Ï Face<1> @supportcamera-1
Face<2>@sunnortcamera-1
Raideur A
Ë
OR UeTT
OR IE
D 6000 + N/m
Cisaillement (N/mm)
ne PTT EE PE Précontrainte en compression (N)
Figure 19 -- Définition des appuis élastiques
La valeur numérique de la raideur radiale des appuis a été choisie 100 fois
supérieure à celle de la
raideur axiale afin de tenir compte du montage des plots amortisseurs abordés
dans la sous-partie IL.2.
Les éléments d'inertie pris en compte sont ceux donnés en figure 18.
022
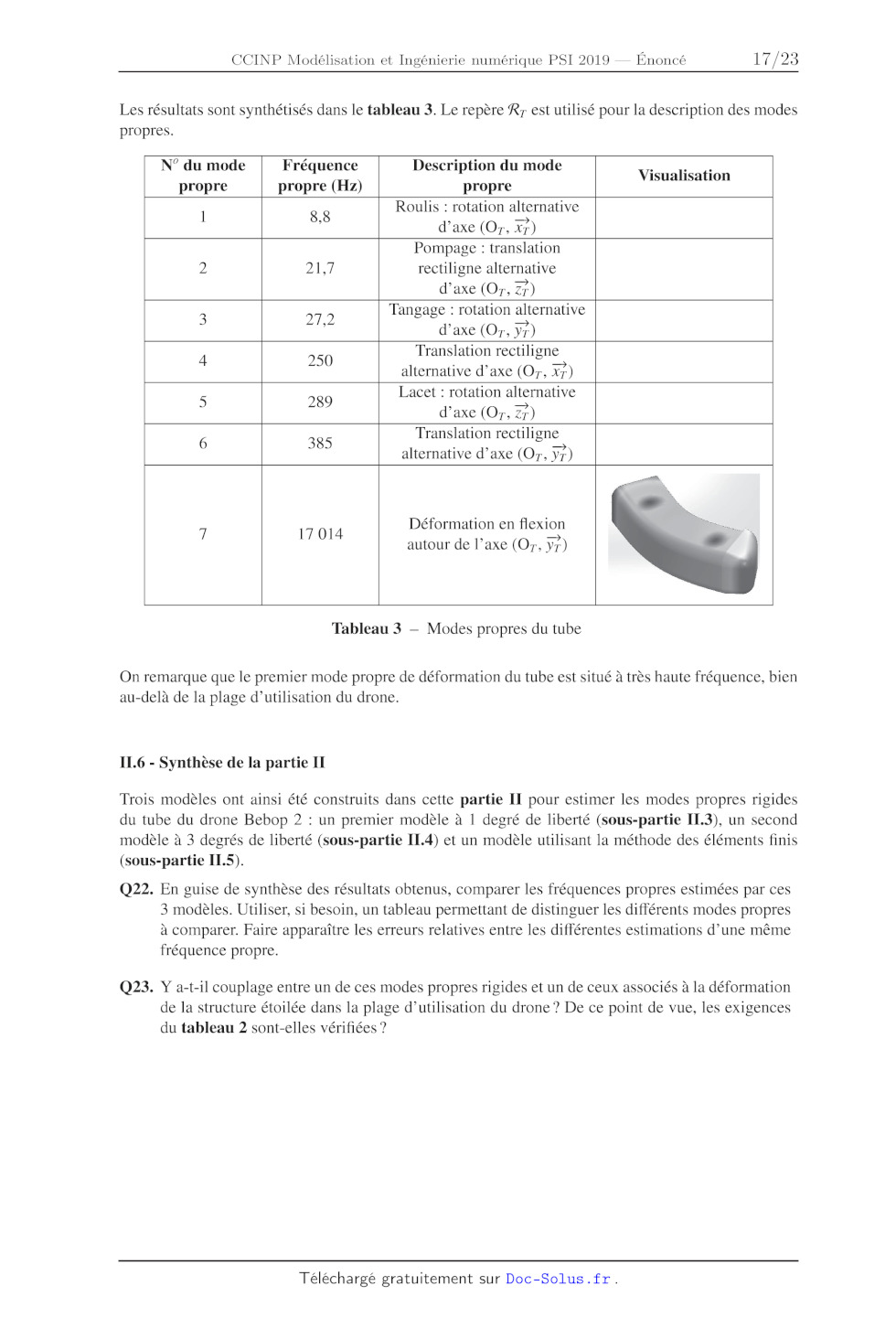
Les résultats sont synthétisés dans le tableau 3. Le repère R7 est utilisé pour
la description des modes
propres.
N° du mode Fréquence Description du mode
propre propre (Hz) propre
I 8 Roulis : rotation alternative
d'axe (Or, xr)
Pompage : translation
2 21,7 rectiligne alternative
d'axe (Or, 27)
Tangage : rotation alternative
Visualisation
? 21,2 d'axe (Or, y7)
Translation rectiligne
4 250 alternative d'axe (Or, X7)
Lacet : rotation alternative
° 75 d'axe (Or, 2)
6 385 Translation rectiligne
alternative d'axe (O7, Yr)
7 17 014 Déformation en flexion
autour de l'axe (Or. yr)
Tableau 3 --- Modes propres du tube
On remarque que le premier mode propre de déformation du tube est situé à très
haute fréquence, bien
au-delà de la plage d'utilisation du drone.
IL.6 - Synthèse de la partie II
Trois modèles ont ainsi été construits dans cette partie IT pour estimer les
modes propres rigides
du tube du drone Bebop 2 : un premier modèle à 1 degré de liberté (sous-partie
IL.3), un second
modèle à 3 degrés de liberté (sous-partie I.4) et un modèle utilisant la
méthode des éléments finis
(sous-partie ILS).
Q22. En guise de synthèse des résultats obtenus, comparer les fréquences
propres estimées par ces
3 modèles. Utiliser, si besoin, un tableau permettant de distinguer les
différents modes propres
à comparer. Faire apparaître les erreurs relatives entre les différentes
estimations d'une même
fréquence propre.
Q23. Y a-t-1l couplage entre un de ces modes propres rigides et un de ceux
associés à la déformation
de la structure étoilée dans la plage d'utilisation du drone ? De ce point de
vue, les exigences
du tableau 2 sont-elles vérifiées ?
17/23
Partie III - Comment alléger la batterie ?
La part de la masse de la batterie dans la masse d'un drone est conséquente :
pour le Bebop 2, dont la
masse totale est de 500 5, la batterie pèse déjà 180 g!
Objectif : estimer la capacité massique maximale d'une batterie de drone et
réfléchir à d'éventuelles
pistes d'allégements.
Figure 20 -- Batterie LiPo 3S, du type de celles utilisées sur le drone Bebop 2
Les batteries installées sur les drones sont constituées de plusieurs
accumulateurs lithium-ion (Li-ion)
à électrolyte polymère (souvent abusivement nommés lithium-polymère et abrégés
en LiPo). L''uti-
lhisation d'un électrolyte polymère non liquide permet de substituer au boîtier
métallique rigide des
batteries Li-1on classiques un sachet plastique souple et léger (figure 20).
Le principe de l'accumulateur lithium-ion est décrit dans le document
ci-dessous.
Document - Principe de fonctionnement d'un accumulateur lithium-ion
Le système électrochimique est constitué d'une électrode de graphite, jouant le
rôle d'anode en
décharge, d'un électrolyte non aqueux et d'une électrode (la cathode lors de la
décharge) élaborée
à partir d'un matériau appelé composé d'insertion AB), capable d'accueillir et
de libérer des ions
lithium de façon réversible.
_ Fy\ | Ainsi, durant la décharge, les 1ons lithium passent en solu-
© LA ton à l'anode, migrent vers la cathode à travers l'électrolyte
MES De et s'insèrent dans le composé d'insertion selon les réactions
| PTS ce électrochimiques suivantes :
LS Électroiyte LiC6() = 6 C(s) +Li'+e
. : br") z Li + Li_,A,B, +ze -- LiA,B,6
| Rs lithium
Anode de carbone Cathode Li,A,B8, NB : les flèches sur la figure ci-contre
indiquent le sens de
d'an-ootooier run eur déplacement des électrons durant la décharge.
Sources : J. Robert et J. Alzieu, Accumulateurs au lithium, Techniques de
l'Ingénieur (2005).
Dans le cas des batteries usuelles, le composé d'insertion A,B, est le dioxyde
de cobalt CoO:(s). Ce
composé seul étant très réactif, 1l est nécessaire d'y maintenir une part
suffisante de lithium. Durant
la décharge, la composition du solide cathodique passe de Li, $CoO, à LiCoO;.
La force électromotrice apparaissant entre les deux électrodes est £ = 3,7 V.
On donne la valeur de
la constante de Faraday F = 9, 6 : 10° C/mol et les masses molaires suivantes :
Li C Si | CoO;
M (g/mol) || 6,9 | 12,0 | 28,1 | 90,9
Q24. Donner l'équation-bilan de la réaction d'oxydoréduction intervenant lors
de la décharge puis
celle intervenant en charge.
18/23
Q25. Les réactifs sont présents en proportions stoechiométriques. Justifier ce
choix.
Exprimer alors la masse m,.... de réactifs présents dans un accumulateur en
fonction de n,
nombre de moles d'électrons échangés durant la décharge et des masses molaires.
Q26. En déduire l'expression de qyux, Capacité massique maximale (ou capacité
spécifique théo-
rique) d'un accumulateur, en fonction de # et des masses molaires. Donner sa
valeur numé-
rique en A:-h/kg puis celle en W:h/kg de l'énergie massique associée.
La batterie 3$ du Bebop 2 (figure 20) possède une capacité totale de 2 700
mA:h, une masse de 180 g
et impose une tension U = 11,1 V.
Q27. Par quelle association d'accumulateurs peut-on la modéliser ?
Estimer la capacité massique d'un accumulateur et la comparer à g,,,. Comment
pourrait-on
se rapprocher de cette capacité maximale ?
Pour augmenter la capacité massique des batteries, la recherche porte également
sur les matériaux
composant les électrodes. En particulier, des anodes de silicium (donnant pour
une batterie chargée
un alliage d'insertion LiS1,22) ou de lithium pur sont envisagées pour
remplacer le graphite.
Q28. À l'aide d'une application numérique, expliquer l'intérêt d'une anode en
silicium ou en lithium
pur. On pourra adapter la réponse à la question Q26, la réaction de réduction à
la cathode
n'étant pas modifiée.
Partie IV - Peut-on se passer de batterie ?
S1 la réduction de la masse des batteries reste une problématique majeure, une
solution plus drastique
a été récemment envisagée : leur remplacement par un système d'alimentation à
distance.
Cette idée se base sur les recherches récentes, en particulier les travaux
menés par les groupes de
recherche du Massachusetts Institute of Technology et de la société Witricity,
remettant au goût du
jour le vieux rêve de Nikola Tesla concernant la transmission d'énergie sans fl
(Wireless Power
Transmission où WPT). Le couplage inductif entre des circuits émetteur et
récepteur est actuellement
exploité pour la recharge de petits appareils portables et est envisagé
notamment pour l'alimentation
des transports en commun ou la domotique (figure 21).
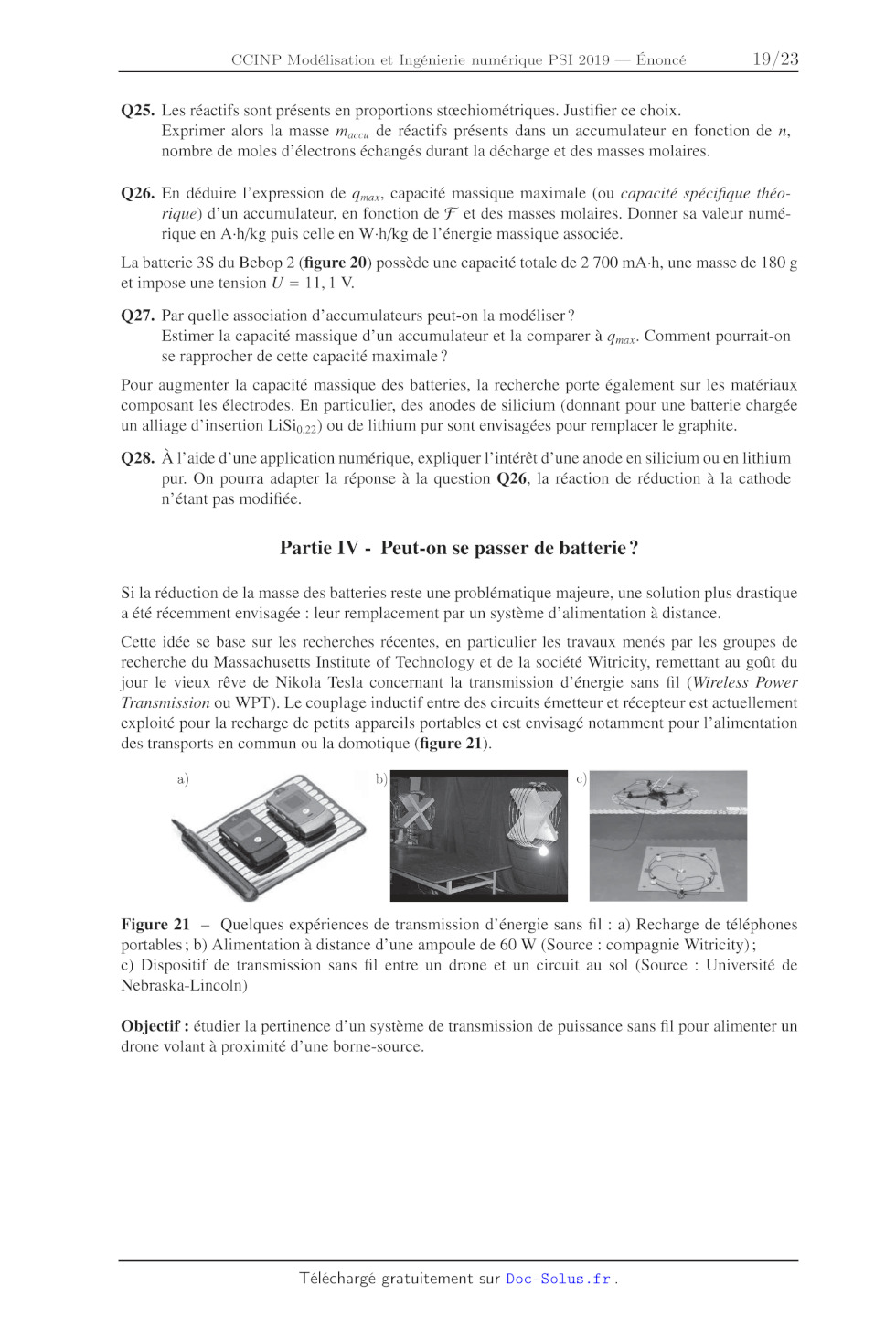
Figure 21 -- Quelques expériences de transmission d'énergie sans fil : a)
Recharge de téléphones
portables ; b) Alimentation à distance d'une ampoule de 60 W (Source :
compagnie Witricity) ;
c) Dispositif de transmission sans fil entre un drone et un circuit au sol
(Source : Université de
Nebraska-Lincoln)
Objectif : étudier la pertinence d'un système de transmission de puissance sans
fil pour alimenter un
drone volant à proximité d'une borne-source.
19/23
IV.1 - Modèle électrique équivalent d'une antenne
Un tel dispositif d'alimentation à distance serait constitué d'une bobine
émettrice placée sur un sup-
port au sol, ainsi que d'une bobine réceptrice et d'un étage de conversion de
puissance, tous deux
embarqués sur le drone.
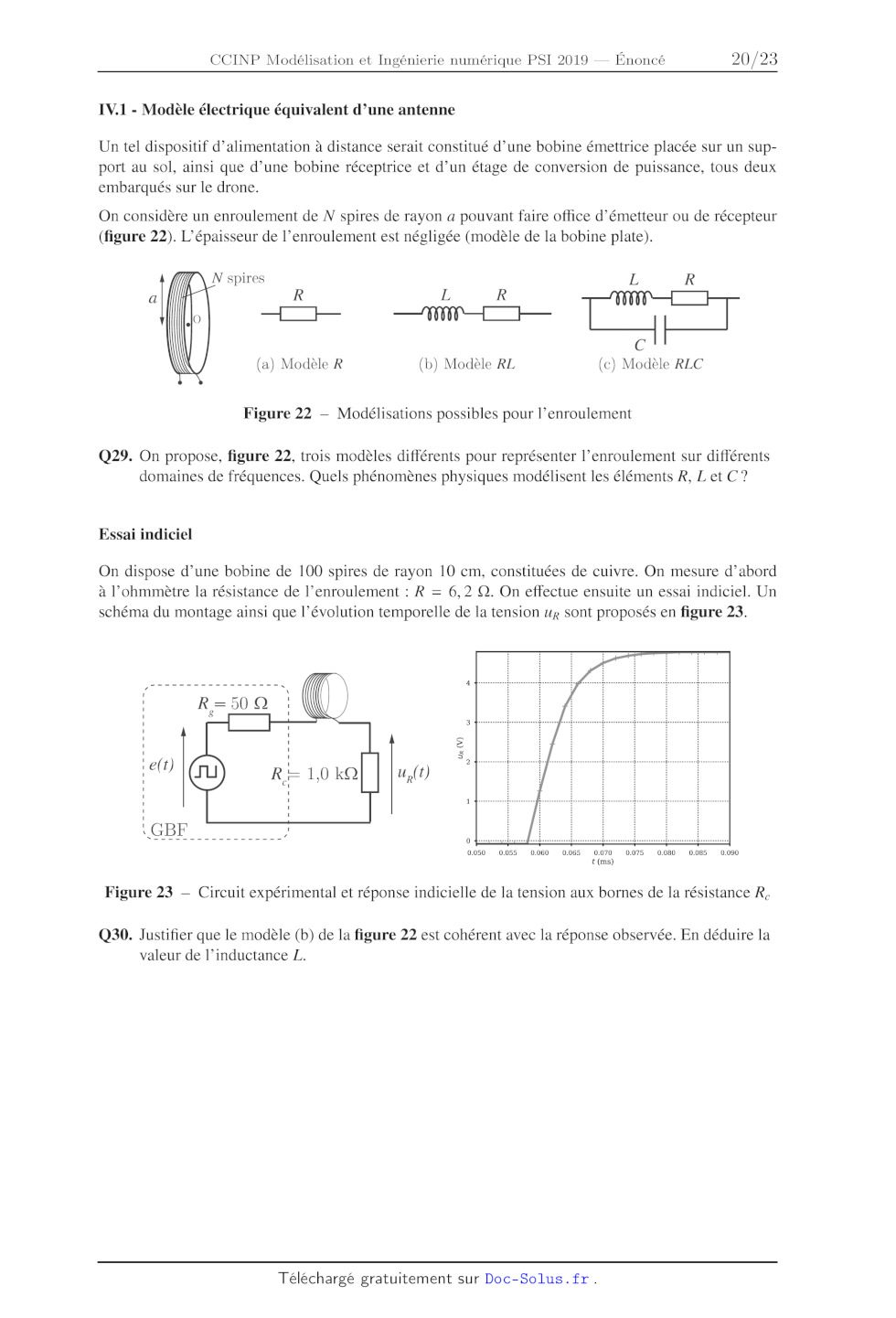
On considère un enroulement de N spires de rayon a pouvant faire office
d'émetteur ou de récepteur
(figure 22). L'épaisseur de l'enroulement est négligée (modèle de la bobine
plate).
1 N spires L R
a R L'OR MN
-- ON | |
ci
(a) Modèle R (b) Modèle RL (c) Modèle RLC
Figure 22 --- Modélisations possibles pour l'enroulement
Q29. On propose, figure 22, trois modèles différents pour représenter
l'enroulement sur différents
domaines de fréquences. Quels phénomènes physiques modélisent les éléments À, L
et C?
Essai indiciel
On dispose d'une bobine de 100 spires de rayon 10 cm, constituées de cuivre. On
mesure d'abord
à l'ohmmètre la résistance de l'enroulement : À = 6,2 Q. On effectue ensuite un
essai indiciel. Un
schéma du montage ainsi que l'évolution temporelle de la tension w Sont
proposés en figure 23.
PTT TT TT TT TS 4 F-
ca Q ,
e(n) RE 10 kQ| [lu ]
UR (V)
_
|
GBF 2 ---- ' 0 cotes /
0.050 0.055 0.060 0.065 0.070 0.075 0.080 0.085 0.090
t (ms)
Figure 23 -- Circuit expérimental et réponse indicielle de la tension aux
bornes de Îa résistance À:
Q30. Justifier que le modèle (b) de la figure 22 est cohérent avec la réponse
observée. En déduire la
valeur de l'inductance L.
20/23
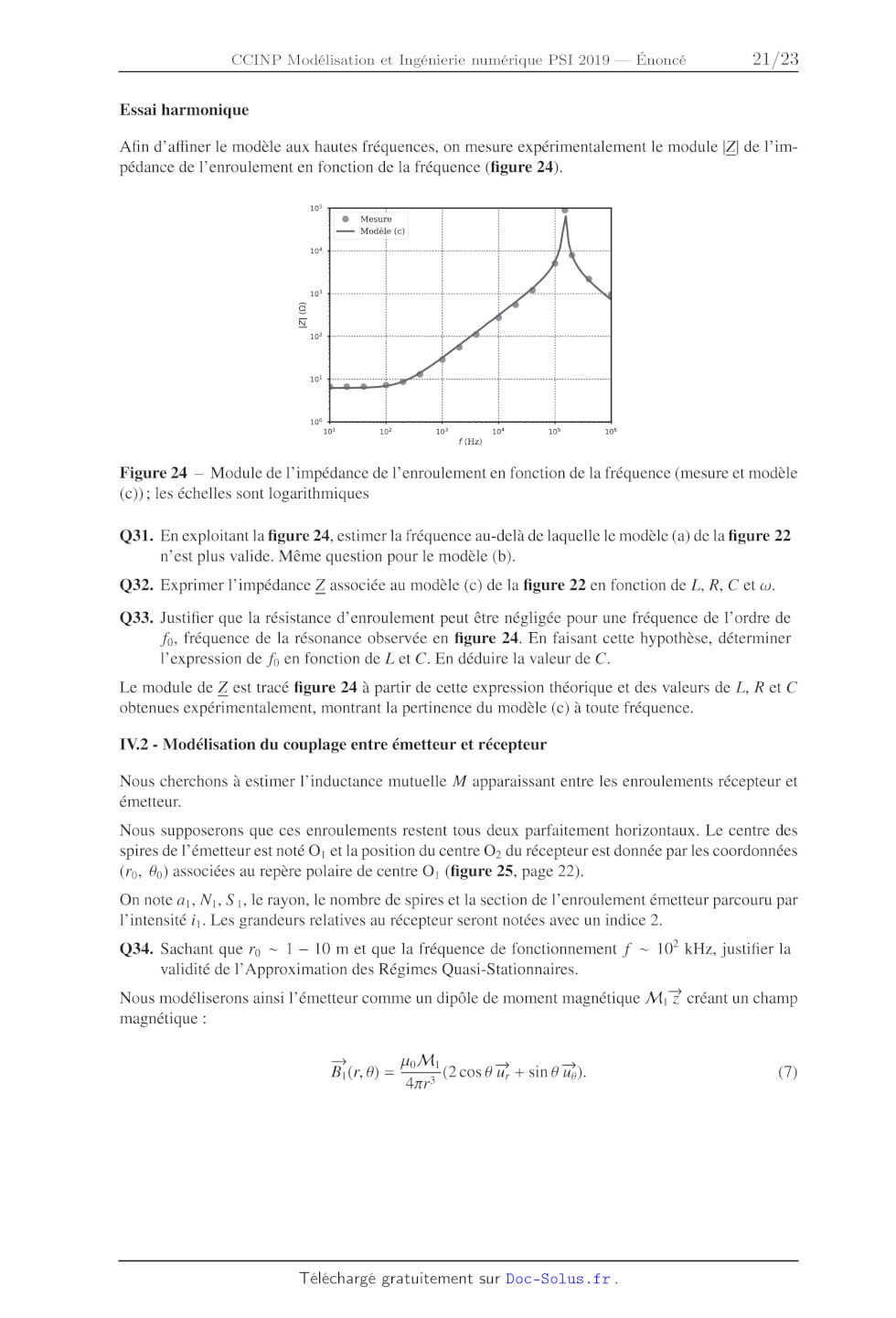
Essai harmonique
Afin d'afhiner le modèle aux hautes fréquences, on mesure expérimentalement le
module [7] de l'im-
pédance de l'enroulement en fonction de la fréquence (figure 24).
105 --
[ Mesure
Modèle (c) |
| \
103 A
U A .
101 DPé
[ZI (Q)
p
9
100
10! 10? 10° 10* 10° 105
f (Hz)
Figure 24 --- Module de l'impédance de l'enroulement en fonction de la
fréquence (mesure et modèle
(c)) ; les échelles sont logarithmiques
Q31. En exploitant la figure 24, estimer la fréquence au-delà de laquelle le
modèle (a) de la figure 22
n'est plus valide. Même question pour le modèle (b).
Q32. Exprimer l'impédance Z associée au modèle (c) de la figure 22 en fonction
de L, R, C et w.
Q33. Justifier que la résistance d'enroulement peut être négligée pour une
fréquence de l'ordre de
Jo, fréquence de la résonance observée en figure 24. En faisant cette
hypothèse, déterminer
l'expression de f, en fonction de L et C. En déduire la valeur de C.
Le module de Z est tracé figure 24 à partir de cette expression théorique et
des valeurs de Z, R et C
obtenues expérimentalement, montrant la pertinence du modèle (c) à toute
fréquence.
IV.2 - Modélisation du couplage entre émetteur et récepteur
Nous cherchons à estimer l'inductance mutuelle M apparaissant entre les
enroulements récepteur et
émetteur.
Nous supposerons que ces enroulements restent tous deux parfaitement
horizontaux. Le centre des
spires de l'émetteur est noté O, et la position du centre O; du récepteur est
donnée par les coordonnées
(ro, 00) associées au repère polaire de centre O, (figure 25, page 22).
On note a;, N;,S,, le rayon, le nombre de spires et la section de l'enroulement
émetteur parcouru par
l'intensité i.. Les grandeurs relatives au récepteur seront notées avec un
indice 2.
Q34. Sachant que ro -- 1 -- 10 m et que la fréquence de fonctionnement f -- 10°
kHz, justifier la
validité de l' Approximation des Régimes Quasi-Stationnaires.
> . . » + A 2, --> 2
Nous modéliserons ainsi l'émetteur comme un dipôle de moment magnétique M, 7
créant un champ
magnétique :
re UoM
B\(r, 0) --
1U,6) Axr*
(2 cos Ou, + sin 0 U}). (7)
21/23
Figure 25 -- Émetteur et récepteur
Q35. Exprimer la norme du moment magnétique M, en fonction de N., S; et r1.
Rappeler l'expression définissant la mutuelle inductance M entre les circuits 1
et 2 puis, en
>? u
supposant le champ B; uniforme sur toute la surface du récepteur, exprimer M en
fonction de
ro, 00, Ho; Ni, N5, Si et S2.
On donne en figure 26 l'évolution de M en fonction de la distance rs, obtenue
par cette approche
analytique mais aussi par un calcul d'intégration numérique et une série
d'expériences.
1071
---- Analytique
© Numérique
1072 | © Expérimental :
1073 @
À
E 1074 À...
2
10°
_ ee
: 2
0.5 1.0 1.5 2.0 2.5
Fo (m)
Figure 26 -- Inductance mutuelle en fonction de la distance pour 4 = 0, ai = a;
= 10 cmet
N, -- N; -- ]00
Q36. Justifier le désaccord aux faibles distances. Peut-on utiliser le modèle
analytique pour l'appli-
cation étudiée ?
IV.3 - Transmission de puissance par couplage inductif résonnant
Comme on a pu le constater dans l'expérience précédente, le couplage entre
émetteur et récepteur
est très faible dès que la distance entre eux augmente (M décroit
proportionnellement à 1/r°), ce qui
constitue le principal obstacle à la transmission d'une puissance significative.
22/23
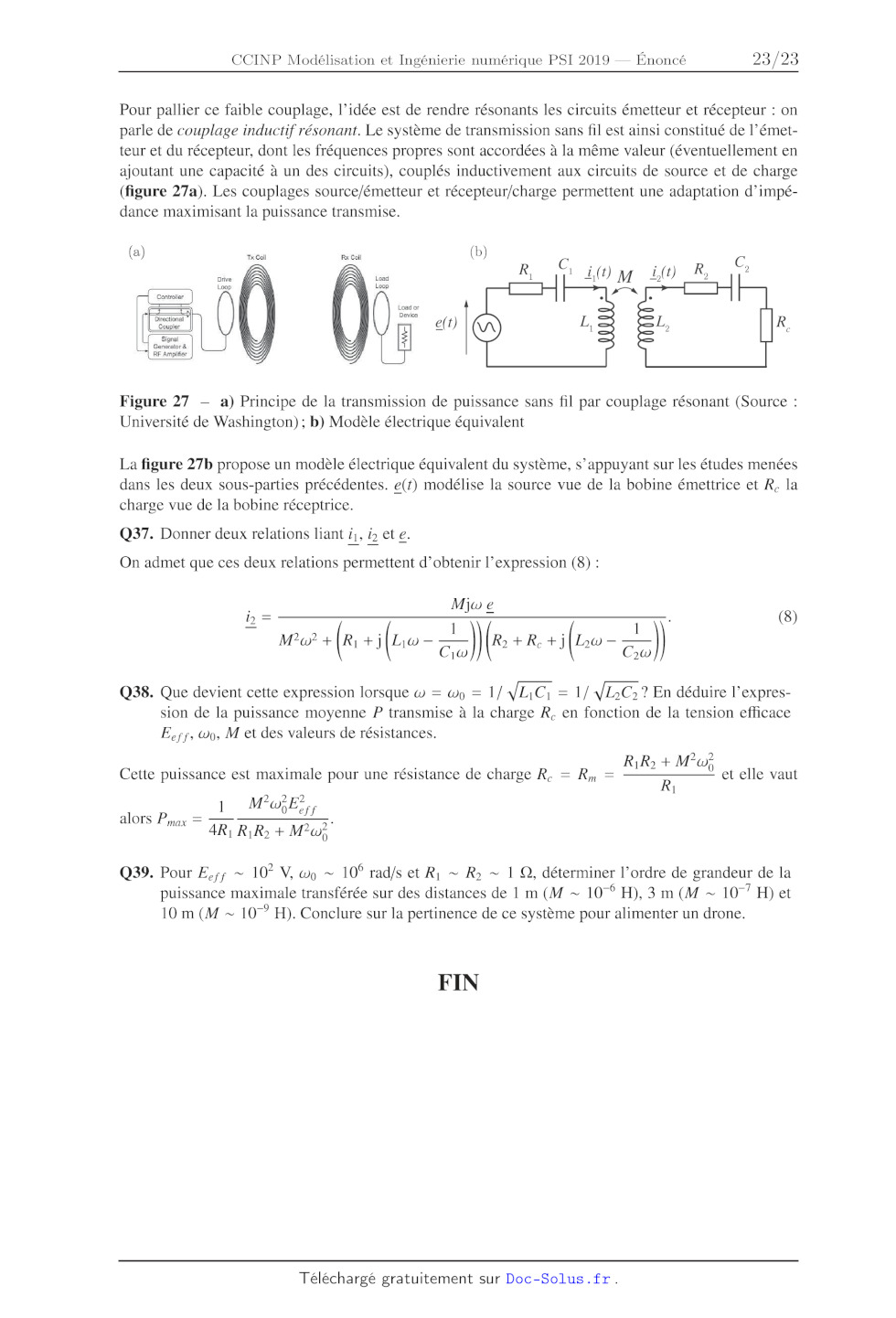
Pour pallier ce faible couplage, l'idée est de rendre résonants les circuits
émetteur et récepteur : on
parle de couplage inductif résonant. Le Système de transmission sans fil est
ainsi constitué de l'émet-
teur et du récepteur, dont les fréquences propres sont accordées à la même
valeur (éventuellement en
ajoutant une capacité à un des circuits), couplés inductivement aux circuits de
source et de charge
(figure 27a). Les couplages source/émetteur et récepteur/charge permettent une
adaptation d'impé-
dance maximisant la puissance transmise.
(a) Tx Coil Rx Coil (b)
Directional
Coupler
Signal
Generator &
RF Amplifier
Figure 27 -- a) Principe de la transmission de puissance sans fil par couplage
résonant (Source :
Université de Washington) ; b) Modèle électrique équivalent
La figure 27b propose un modèle électrique équivalent du système, s'appuyant
sur les études menées
dans les deux sous-parties précédentes. e(f) modélise la source vue de la
bobine émettrice et R. la
charge vue de la bobine réceptrice.
Q37. Donner deux relations liant ll . D et e.
On admet que ces deux relations permettent d'obtenir l'expression (à) :
Mjw e
] ]
M20? + Ri +] Lo - ---- kR) +R. +] Lo -- ----
C1& Co
1) --
(8)
Q38. Que devient cette expression lorsque w = wo = 1/ VLC; = 1/ VLC; ? En
déduire l'expres-
sion de la puissance moyenne P transmise à la charge À: en fonction de la
tension efficace
E,rs, wo, M et des valeurs de résistances.
RiR> + M°w
Cette puissance est maximale pour une résistance de charge R. = Ry -- et elle
vaut
2, 2 pr2
1 Mao,
AR RiR> + Mu?
1
alors Pyux =
Q39. Pour E,;s -- 10°? V, wo -- 10° rad/s et R1 -- R; -- 1 Q, déterminer
l'ordre de srandeur de la
puissance maximale transférée sur des distances de 1 m (M - 10 H),3m(M - 10 Het
10 m(M - 10° H). Conclure sur la pertinence de ce système pour alimenter un
drone.
FIN
23/23