
Centrale Physique PSI 2000
| Thème de l'épreuve | Utilisation des portraits de phase dans les problèmes de commande d'un moteur à courant continu |
| Principaux outils utilisés | électrocinétique, mécanique |
Corrigé
:page de présentation 👈 gratuite pour tous les corrigés si tu crées un compte
indications 👈 l'accès aux indications de tous les corrigés ne coûte que 1 € ⬅ clique ici
I.A 👈 gratuite pour tous les corrigés si tu crées un compte
I.B - I.C - I.D - I.E - II.A - II.B - II.C - II.D.1 -
II.D.2 👈 gratuite pour ce corrigé si tu crées un compte
- II.D.3 - II.D.4 - III.A - III.B.1 - III.B.2 - III.B.3 - III.C.1 - III.C.2 - III.C.3 - IV.A.1 - IV.A.2 - IV.A.3 - IV.A.4 - IV.B.1 - IV.B.2 - IV.B.3 - IV.C.1 - IV.C.2 - IV.C.3 - IV.D.1 - IV.D.2 - IV.E.1 - IV.E.2 - IV.F.1 - IV.F.2 - IV.F.3 - IV.F.4 - IV.F.5 - V.I.1 - V.A.2 - V.A.3 - V.B.1 - V.B.2 - V.B.3 - V.B.4 - V.B.5 - V.B.6
Énoncé complet
(télécharger le PDF)

Rapport du jury
(télécharger le PDF)
Énoncé obtenu par reconnaissance optique des caractères
PHYSIQUE Filière PSI
PHYSIQUE
Utilisation des portraits de phase dans les problèmes de
commande
L'examen du portrait de phase des systèmes, très pra- Moteur
tique dans l'étude des oscillateurs par exemple, est mobile
fréquemment utilisé pour mettre en évidence le com- x
portement de systèmes bouclés. On se propose ici de
dégager quelques propriétés fondamentales, à partir
de l'étude du positionnement de mobile à l'aide d'un convertisseur électroméca-
nique inséré dans une boucle d'asservissement.
Partie I - Modélisation
Le dispositif considéré ici est composé d'un mobile se déplaçant sur un axe Ox ,
entraîné par un moteur à courant continu. On effectuera de nombreuses hypo--
thèses simplificatrices ; aussi ne seront à prendre en compte que les paramètres
des modèles définis ci--dessous, à l'exclusion de tout autre défaut. Le moteur à
courant continu et aimants permanents est décrit par un modèle électrique com-
prenant une source de tension de force électromotrice e proportionnelle à la
vitesse angulaire (» du rotor (@ ='CI>O - oe ) et une résistance R (résistance
d'induit). L'inductance de l'enroulement d'induit est négligée. Le moment par
rapport à l'axe de rotation des forces électromagnétiques est proportionnel à
l'intensité du courant parcourant l'induit : C : (DO - i . Il est à noter que
les gran-
deurs mécaniques C et m sont algébriques et qu'elles ont respectivement le
même signe que les grandeurs électriques i et e .
I.A - Le tension appliquée au moteur est notée u . Les orientations de u , e et
i
sont celles d'une convention récepteur. Lorsque la machine à courant continu
fonctionne en moteur (récepteur électrique), avec e > 0 , le mobile se déplace
dans
le sens des x croissants. Préciser ces orientations sur le schéma équivalent de
la machine. Le mouvement de rotation de l'axe du moteur est converti en mou-
vement de translation du mobile selon la relation x = D - 6 où 6 est l'angle de
rotation. L'inertie totale de l'ensemble des pièces mobiles est modélisée par un
moment d'inertie fictif, exprimé par rapport à l'axe de rotation de la machine
et
noté J . D'éventuels frottements ne seront pris en compte que dans les questions
Concours Centrale-Supélec 2000 1/9
PHYSIQUE Filière PSI
Fil'ère PSI
où il en sera explicitement fait mention. Dans toutes les autres questions, les
seules forces prises en considération seront les forces électromagnétiques. On
précise ci-dessous les valeurs numériques à utiliser dans tout le problème :
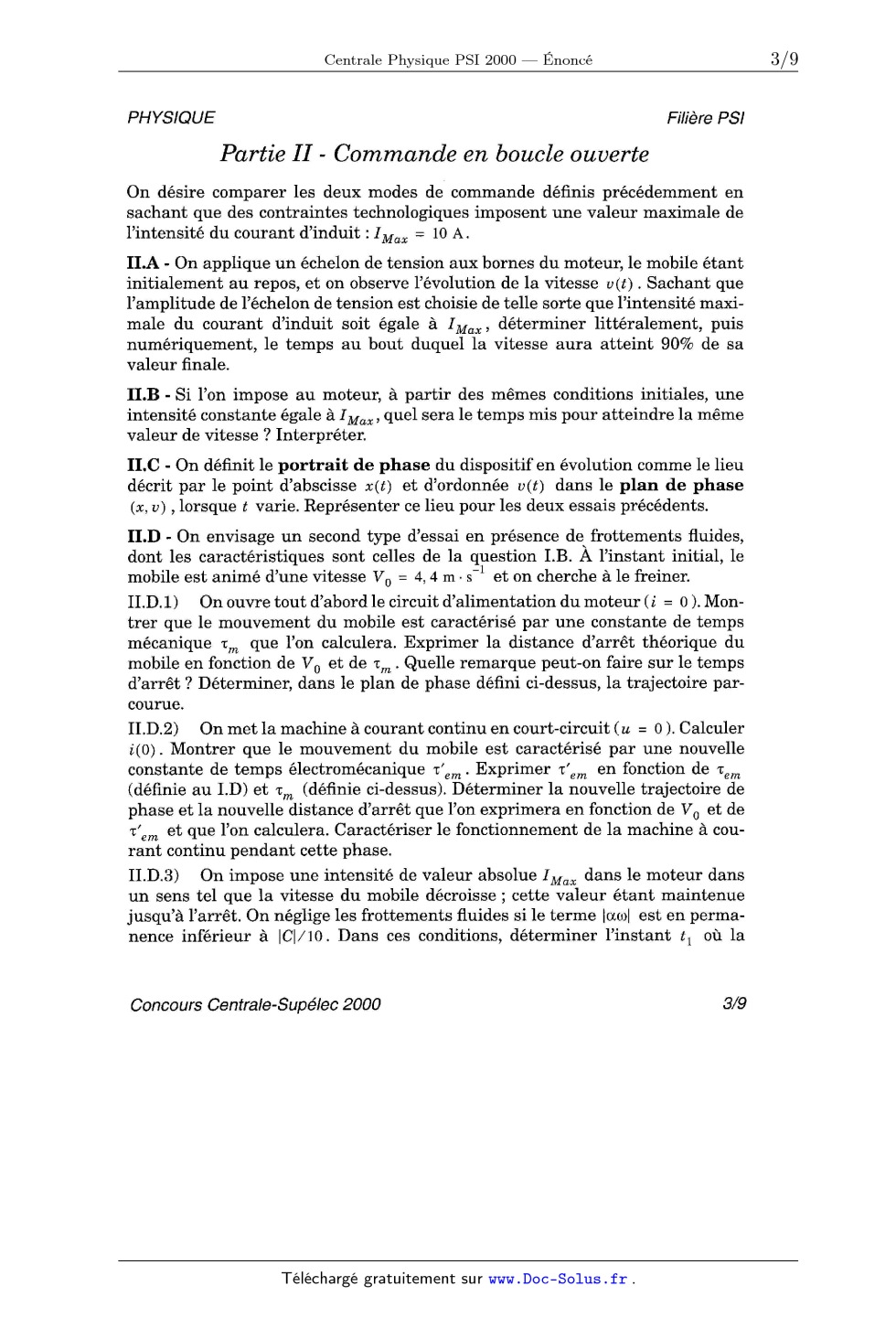
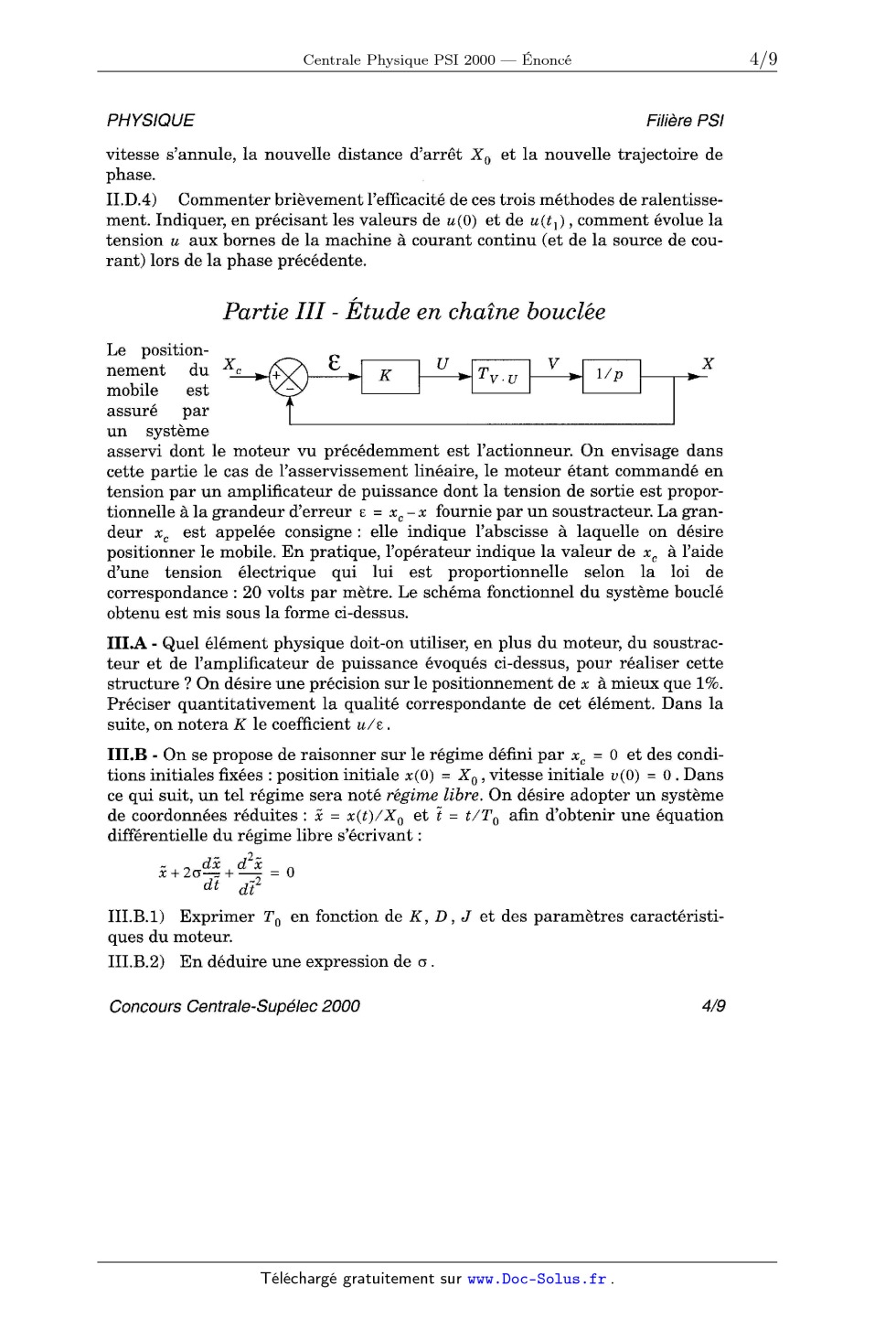
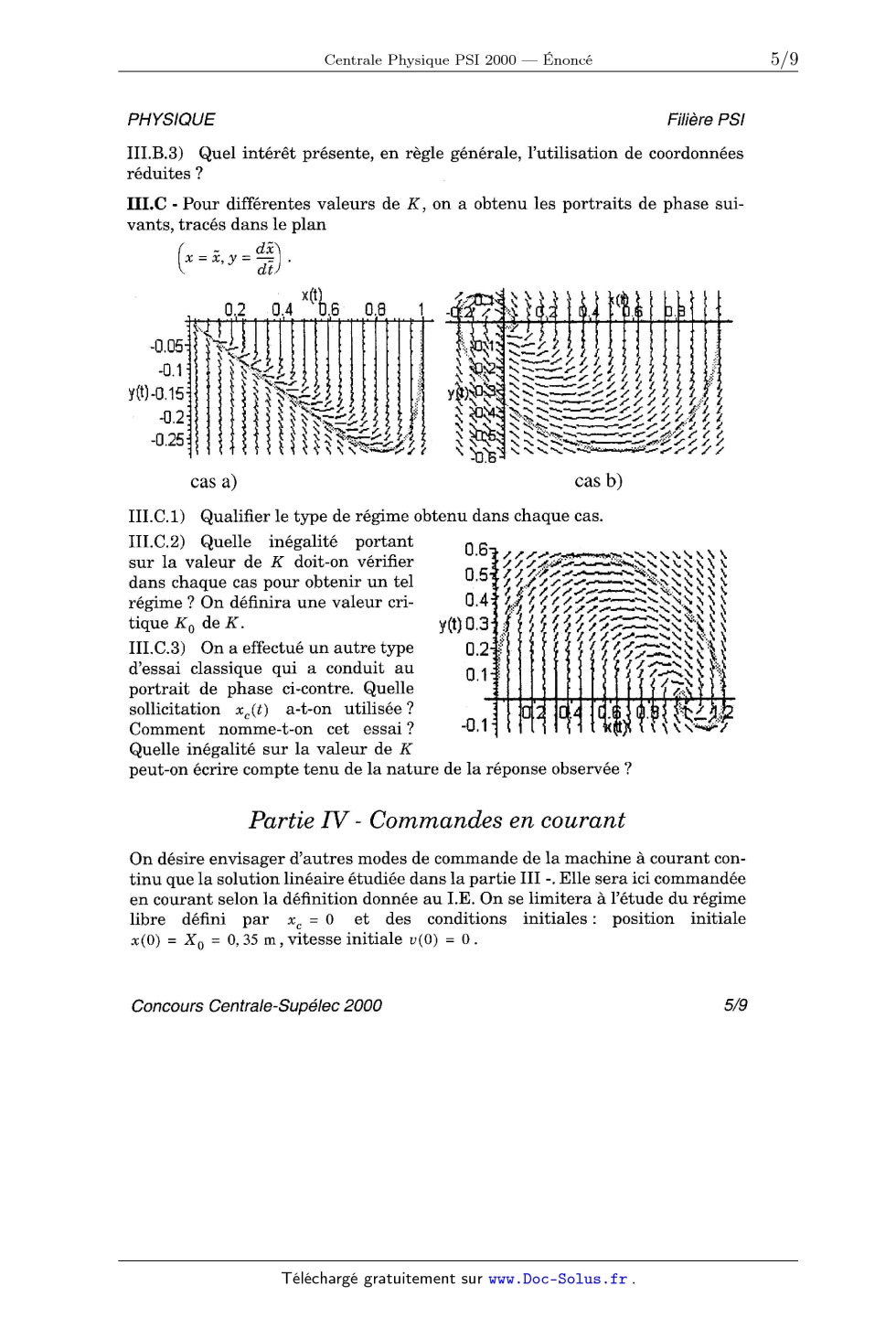
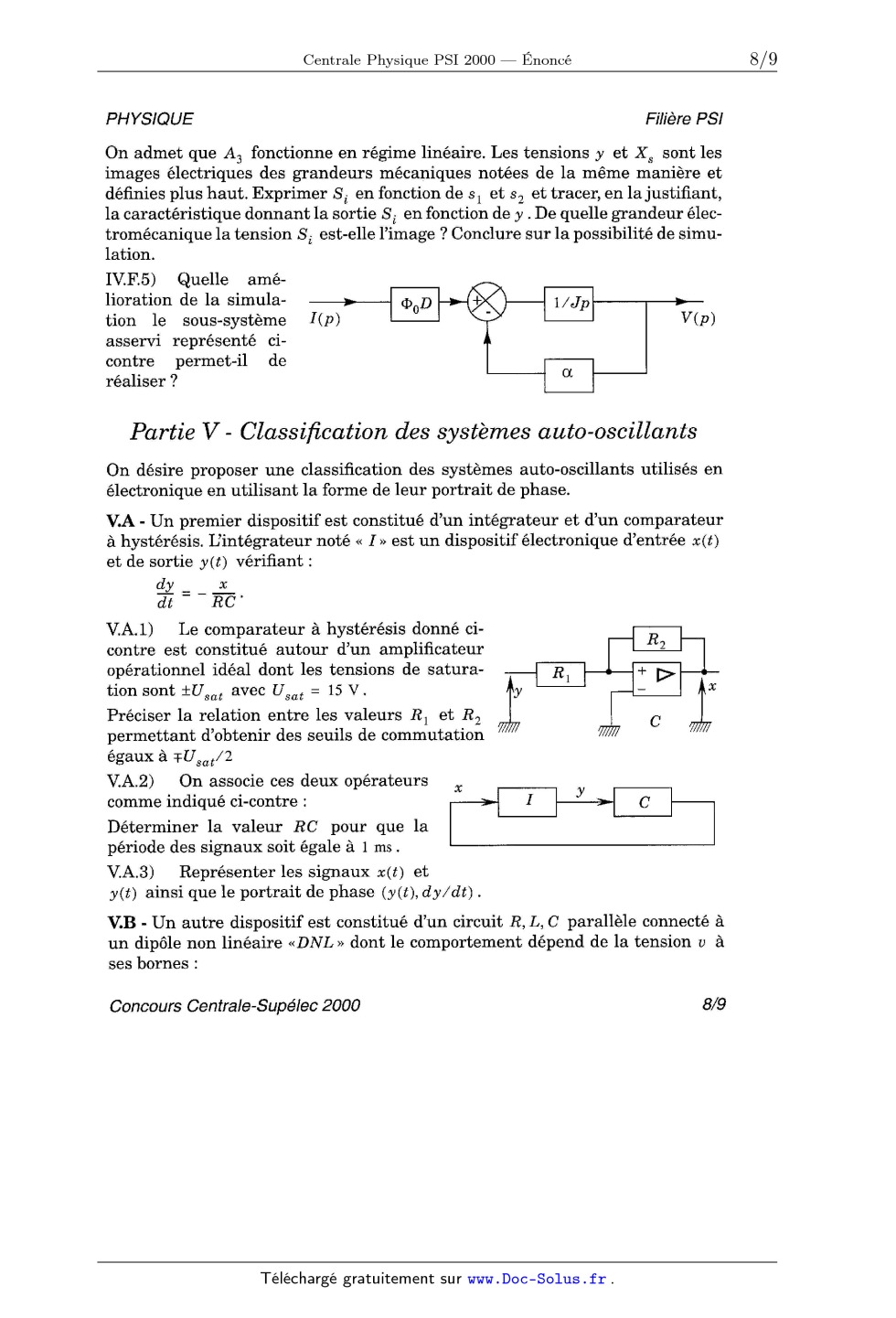
R = 1,59 ;<1>0 = 0,17V-rad'l-s ;J = 1,0><10--3kg-m2 ;D = 0,050m. I.B - La tension aux bornes du moteur ayant la valeur E = 15 V , on attend l'éta- blissement du régime permanent. On note v' la vitesse du mobile observée alors que les frottements fluides, dont les effets sont équivalents à un couple de moment --ocoe appliqué au rotor (0) étant la vitesse angulaire de ce dernier), sont présents. Toutes choses étant égales par ailleurs, si les frottements fluides pou-- vaient être annulés, la vitesse du mobile, notée v , serait différente de v' . Expri- mer et calculer v'/v . On donne : oc : 1,0X10_3N-m-rad_l -s. I.C - On néglige les frottements internes propres au moteur (le couple de moment --ocoe est donc dû aux autres parties du système). Exprimer et calculer le rendement énergétique du moteur lorsque la vitesse du mobile, en régime per-- manent, est v' . Commenter la valeur numérique de ce rendement. Dans les questions qui suivent, aucun frottement n'est pris en compte (jusqu'à HD). I.D - Si l'on suppose qu'une tension u est appliquée aux bornes de l'induit par une source de tension et si l'on note u la vitesse de déplacement du mobile, exprimer les fonctions de transfert suivantes : TX_ U = %(p), TV_ U = %.(p). On parle alors de commande en tension. Définir et calculer une constante de temps électroécanique rem à partir des fonc- tions de transfert ci--dessus. I.E - Si l'on suppose maintenant qu'une intensité i du courant d'induit est impo- sée par une source de courant, calculer la fonction de transfert TV_ 1 : 'Î]( p). On parle alors de commande en courant. Concours Centrale-Supélec 2000 2/9 PHYSIQUE Filière PSI Partie II - Commande en boucle ouverte On désire comparer les deux modes de commande définis précédemment en sachant que des contraintes technologiques imposent une valeur maximale de l'intensité du courant d'induit : I Max : 10 A. II.A - On applique un échelon de tension aux bornes du moteur, le mobile étant initialement au repos, et on observe l'évolution de la vitesse v(t) . Sachant que l'amplitude de l'échelon de tension est choisie de telle sorte que l'intensité maxi- male du courant d'induit soit égale à I Max , déterminer littéralement, puis numériquement, le temps au bout duquel la vitesse aura atteint 90% de sa valeur finale. II.B - Si l'on impose au moteur, à partir des mêmes conditions initiales, une intensité constante égale à [Max, quel sera le temps mis pour atteindre la même valeur de vitesse ? Interpréter. II.C - On définit le portrait de phase du dispositif en évolution comme le lieu décrit par le point d'abscisse x(t) et d'ordonnée v(t) dans le plan de phase (x, v) , lorsque t varie. Représenter ce lieu pour les deux essais précédents. II.D - On envisage un second type d'essai en présence de frottements fluides, dont les caractéristiques sont celles de la question LB. A l'instant initial, le mobile est animé d'une vitesse V0 = 4, 4 m - s_1 et on cherche à le freiner. II.D.1) On ouvre tout d'abord le circuit d'alimentation du moteur ( i = 0 ). Mon- trer que le mouvement du mobile est caractérisé par une constante de temps mécanique rm que l'on calculera. Exprimer la distance d'arrêt théorique du mobile en fonction de V0 et de "Em . Quelle remarque peut-on faire sur le temps d'arrêt ? Déterminer, dans le plan de phase défini ci-dessus, la trajectoire par- courue. II.D.2) On met la machine à courant continu en court-circuit (u = 0 ). Calculer i(0). Montrer que le mouvement du mobile est caractérisé par une nouvelle constante de temps électromécanique 'E'em. Exprimer t'em en fonction de 1... (définie au ID) et rm (définie ci--dessus). Déterminer la nouvelle trajectoire de phase et la nouvelle distance d'arrêt que l'on exprimera en fonction de V0 et de r' et que l'on calculera. Caractériser le fonctionnement de la machine à cou- em rant continu pendant cette phase. II.D.3) On impose une intensité de valeur absolue I Max dans le moteur dans un sens tel que la vitesse du mobile décroisse ; cette valeur étant maintenue jusqu'à l'arrêt. On néglige les frottements fluides si le terme locoel est en perma- nence inférieur à [CV 10. Dans ces conditions, déterminer l'instant t1 où la Concours Centrale-Supélec 2000 3/9 PHYSIQUE Filière PSI vitesse s'annule, la nouvelle distance d'arrêt X0 et la nouvelle trajectoire de phase. II.D.4) Commenter brièvement l'efficacité de ces trois méthodes de ralentisse-- ment. Indiquer, en précisant les valeurs de u(0) et de u(t1) , comment évolue la tension u aux bornes de la machine à courant continu (et de la source de cou- rant) lors de la phase précédente. Partie III - Étude en chaîne bouclêe Le position-- nement du mobile est assuré par un système asservi dont le moteur vu précédemment est l'actionneur. On envisage dans cette partie le cas de l'asservissement linéaire, le moteur étant commandé en tension par un amplificateur de puissance dont la tension de sortie est propor-- tionnelle à la grandeur d'erreur 8 : xc -- x fournie par un soustracteur. La gran- deur xc est appelée consigne : elle indique l'abscisse à laquelle on désire positionner le mobile. En pratique, l'opérateur indique la valeur de xe à l'aide d'une tension électrique qui lui est proportionnelle selon la loi de correspondance : 20 volts par mètre. Le schéma fonctionnel du système bouclé obtenu est mis sous la forme ci-dessus. III.A - Quel élément physique doit-on utiliser, en plus du moteur, du soustrac- teur et de l'amplificateur de puissance évoqués ci-dessus, pour réaliser cette structure ? On désire une précision sur le positionnement de x à mieux que 1%. Préciser quantitativement la qualité correspondante de cet élément. Dans la suite, on notera K le coefficient u/e . III.B - On se propose de raisonner sur le régime défini par acC : 0 et des condi- tions initiales fixées : position initiale x(0) : X 0 , vitesse initiale v(0) : 0 . Dans ce qui suit, un tel régime sera noté régime libre. On désire adopter un système de coordonnées réduites : îc : x(t)/XO et Z : t/T0 afin d'obtenir une équation différentielle du régime libre s'écrivant : .. 2... & + 258115 + d--x = 0 dt dZ2 III.B.1) Exprimer T0 en fonction de K , D, J et des paramètres caractéristi-- ques du moteur. III.B.2) En déduire une expression de o . Concours Centrale-Supélec 2000 4/9 PHYSIQUE Filière PSI III.B.3) Quel intérêt présente, en règle générale, l'utilisation de coordonnées réduites ? III.C - Pour différentes valeurs de K , on a obtenu les portraits de phase sui-- vants, tracés dans le plan ... dîc (x=x,y=-Û-£â . XÜÈ f...-"| ; \ \ \ '-- '* ; 0.2 0.4 .5 0.8 1 / _=>ËZ "' :_ . v (| . | : g
._ .. ""-J' E
'ÛÜ5 \Î--q' ilî=\'Ël È'£frf ; : !
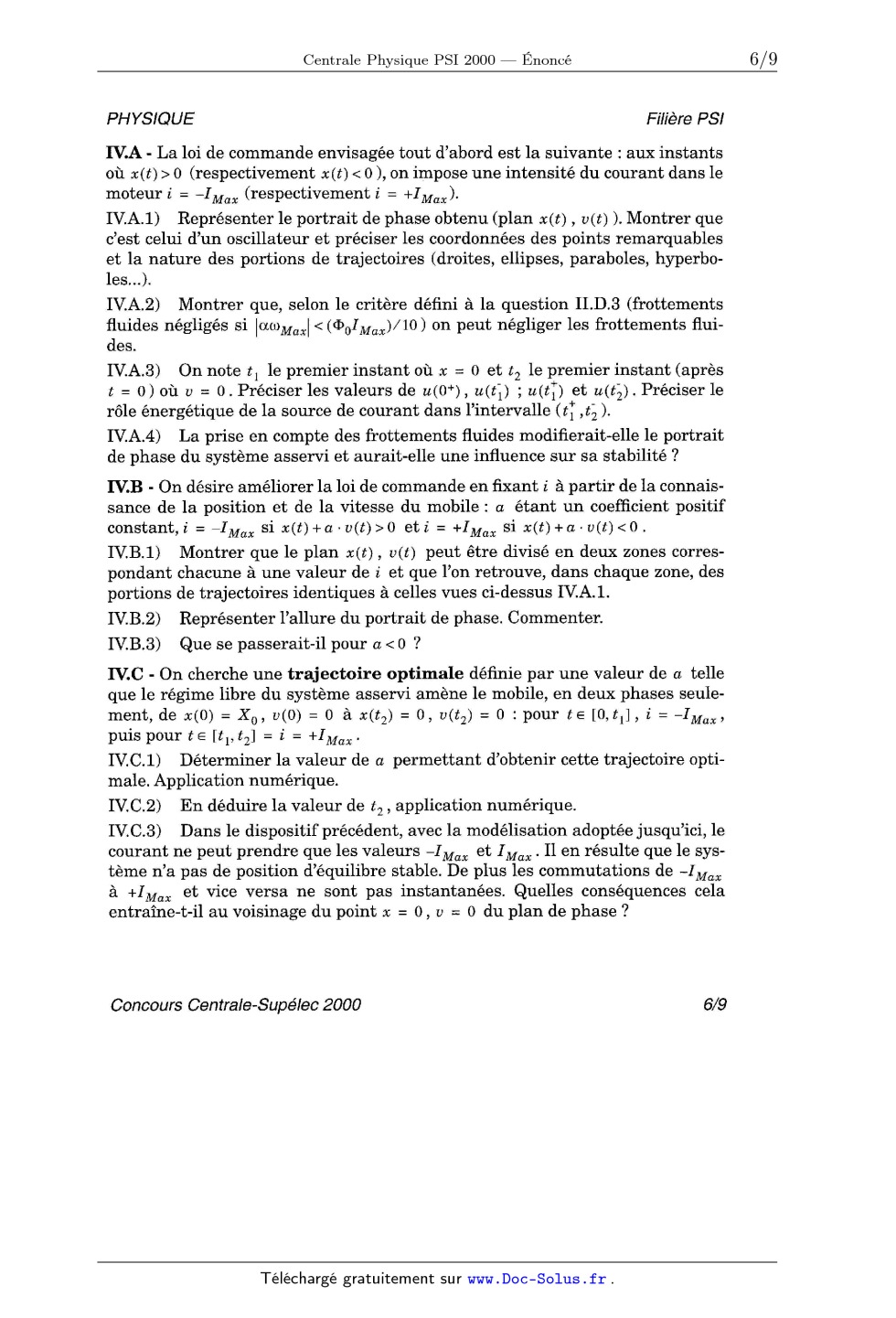
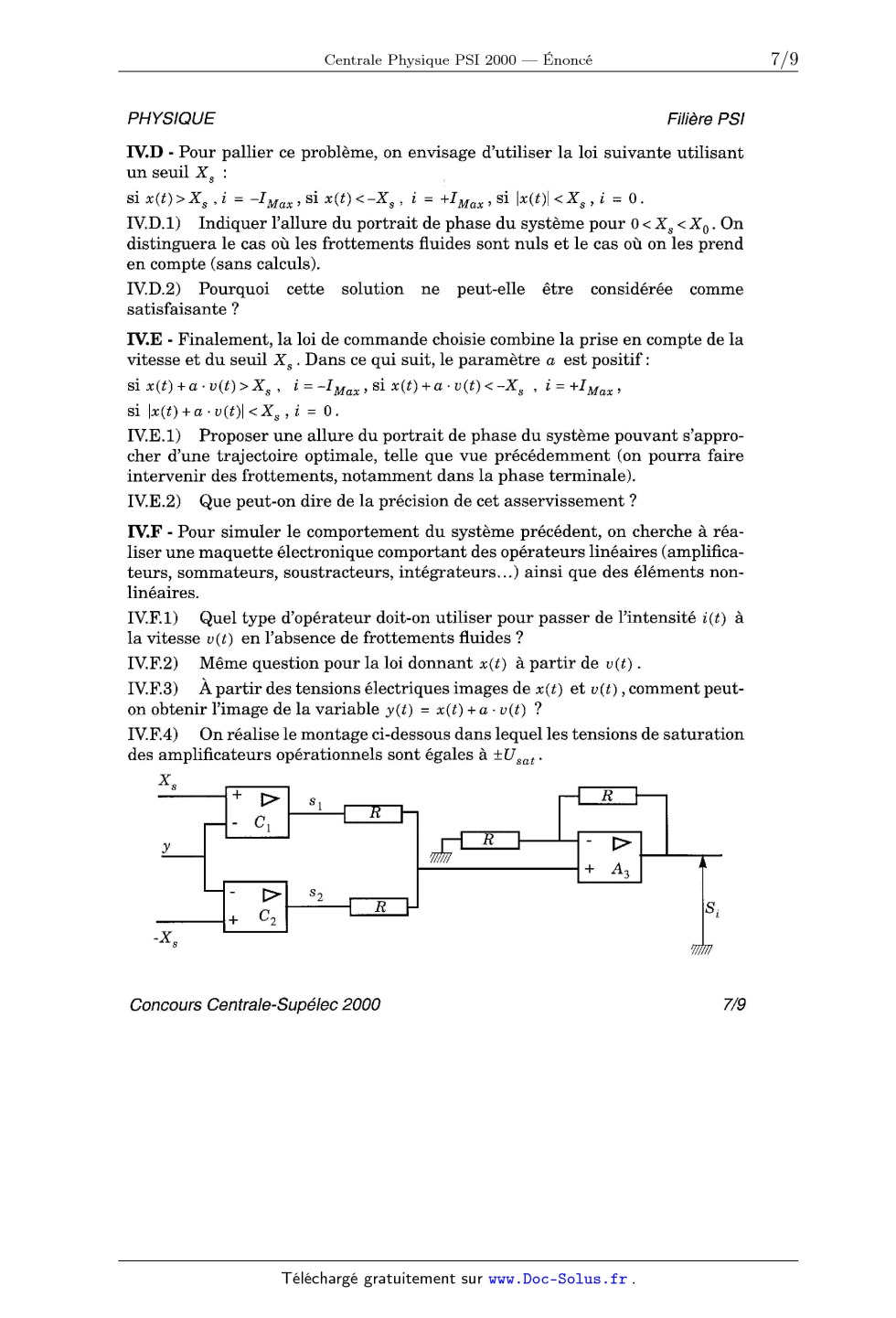
-0.1 <<_< äï® -- hr...f4ä &: ; g , {\ \"ï--;---: \ \ù ä:------------£ÇÇÿÿ ÿ'ff :" £ Y(Ù-Û.15 {' N*\'-ä£fr .» YÈ3)ÈÜË" àQ\wfç{,/ÿÿ «; ; ;,g, a; { ""' % èæüf' ' \ ; "'.--. \:"*---------«*/ÿf / / ! fill} ! -Ü_2 { \ % }\;""""f / 5 \ $\ -- &Em \\w--«v'f / / !..-51 / .! ' \ \ ä"x'--'-=££H ; î= \ '\'ä"'ä\'--wff//.æf"l ! z |] 25 l'. \ \ \ \ < 0 (respectivement x(t) < 0 ), on impose une intensité du courant dans le moteur i = --IMax (respectivement i : +1Max ). IV.A.1) Représenter le portrait de phase obtenu (plan x(t) , v(t) ). Montrer que c'est celui d'un oscillateur et préciser les coordonnées des points remarquables et la nature des portions de trajectoires (droites, ellipses, paraboles, hyperbo- les...). IV.A.2) Montrer que, selon le critère défini à la question II.D.3 (frottements fluides négligés si |°""Maxl < ((DOIMax)/ 10) on peut négliger les frottements flui- des. IV.A.3) On note t1 le premier instant où x = 0 et t2 le premier instant (après t = 0) où v = 0. Préciser les valeurs de u(0+) , u(ti) ; u(tÎ) et u(t'2). Préciser le rôle énergétique de la source de courant dans l'intervalle (tÎ ,at'2 ). IV.A.4) La prise en compte des frottements fluides modifierait-elle le portrait de phase du système asservi et aurait-elle une influence sur sa stabilité ? IV.B - On désire améliorer la loi de commande en fixant i à partir de la connais- sance de la position et de la vitesse du mobile : a étant un coefficient positif constant,i : --IMax si x(t)+a -- v(t)>0 eti : +IMax si x(t)+a - v(t)<0. IV.B.1) Montrer que le plan x(t) , v(t) peut être divisé en deux zones corres- pondant chacune à une valeur de i et que l'on retrouve, dans chaque zone, des portions de trajectoires identiques à celles vues ci-dessus IV.A.1. IV.B.2) Représenter l'allure du portrait de phase. Commenter. IV.B.3) Que se passerait-il pour a < 0 ? IV.C - On cherche une trajectoire optimale définie par une valeur de a telle que le régime libre du système asservi amène le mobile, en deux phases seule- ment, de x(0) = XO, v(0) : 0 à x(t2) : O, v(t2) : 0 : pour te [O,tl], i : --IMax, puis pour te [t1,t2] : i : +IMax. IV.C.1) Déterminer la valeur de a permettant d'obtenir cette trajectoire opti- male. Application numérique. IV.C.2) En déduire la valeur de 152 , application numérique. IV.C.3) Dans le dispositif précédent, avec la modélisation adoptée jusqu'ici, le courant ne peut prendre que les valeurs --IMax et I Max . Il en résulte que le sys- tème n'a pas de position d'équilibre stable. De plus les commutations de --IMax à +IMax et vice versa ne sont pas instantanées. Quelles conséquences cela entraîne--t-il au voisinage du point x = 0 , v = 0 du plan de phase ? Concours Centrale--Supélec 2000 6/9 PHYSIQUE Filière PSI IV.D - Pour pallier ce problème, on envisage d'utiliser la loi suivante utilisant un seuil X 8 : si x(t)>Xs ,i = --1Max,si x(t)<--X i = +IMax,si lx(t)lXs , i= "IMax7 si x(t)+a-v(t)<--Xs , i : +1Max' si |x(t)+a-v(t)l > dont le comportement dépend de la tension U à
ses bornes :
Concours Centrale-Supélec 2000 8/9
PHYSIQUE Filière PSI
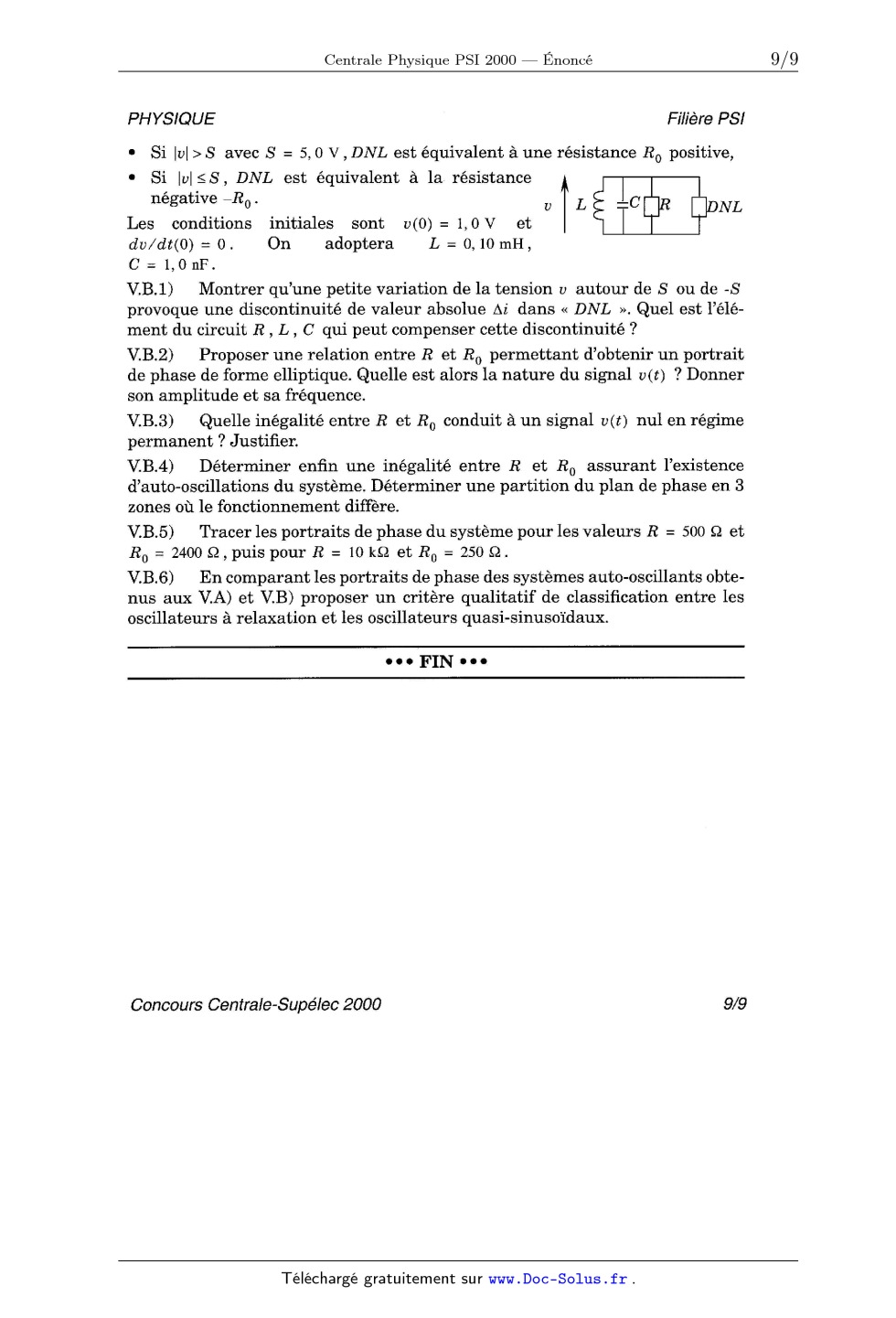
° Si lvl > S avec S = 5,0 V , DNL est équivalent à une résistance RO positive,
° Si |v|SS, DNL est équivalent à la résistance
négative --RO. U L ' . 'INL
Les conditions initiales sont v(O) : 1,0 V et
dv/dt(0) : 0. On adoptera L = 0,10 mH,
C = 1,0 nF.
V.B.l) Montrer qu'une petite variation de la tension v autour de S ou de --S
provoque une discontinuité de valeur absolue Ai dans << DNL ». Quel est l'élé- ment du circuit R , L , C qui peut compenser cette discontinuité ? V.B.2) Proposer une relation entre R et R0 permettant d'obtenir un portrait de phase de forme elliptique. Quelle est alors la nature du signal v(t) ? Donner son amplitude et sa fréquence. V.B.3) Quelle inégalité entre R et R0 conduit à un signal v(t) nul en régime permanent ? Justifier. V.B.4) Déterminer enfin une inégalité entre R et R0 assurant l'existence d'auto-oscillations du système. Déterminer une partition du plan de phase en 8 zones où le fonctionnement diffère. V.B.5) Tracer les portraits de phase du système pour les valeurs R = 500 Q et R0 = 2400 9, puis pour R = 10 kg et R0 = 250 Q. V.B.6) En comparant les portraits de phase des systèmes auto--oscillants obte- nus aux V.A) et VB) proposer un critère qualitatif de classification entre les oscillateurs à relaxation et les oscillateurs quasi-sinusoïdaux. 00. FIN 000 Concours Centrale-Supélec 2000 9/9