
e3a Physique PSI 2010
| Thème de l'épreuve | Effet Hall et applications |
| Principaux outils utilisés | électromagnétisme, électronique |
Corrigé
:👈 gratuite pour tous les corrigés si tu crées un compte
👈 l'accès aux indications de tous les corrigés ne coûte que 1 € ⬅ clique ici
👈 gratuite pour tous les corrigés si tu crées un compte
- - - - - - - - - - - - - - -
👈 gratuite pour ce corrigé si tu crées un compte
- - - - - - - - - - - - - - - - - - - -
Énoncé complet
(télécharger le PDF)


Rapport du jury
(télécharger le PDF)

Énoncé obtenu par reconnaissance optique des caractères
10PS|12
935
CONCOURS ARTS ET MÉTIERS ParisTech - ESTP - ARCHIMEDE
Épreuve de Physique PSI
Durée 3 h
Si, au cours de l'épreuve, un candidat repère ce qui lui semble être une erreur
d'énoncé, d'une
part il le signale au chef de salle, d'autre part il le signale sur sa copie et
poursuit sa
composition en indiquant les raisons des initiatives qu'il est amené à prendre.
L'usage de calculatrices est interdit.
A rendre avec la copie 1 document--réponse non--plié
Le problème comporte deux parties : l'étude de l'effet Hall en régime permanent
ainsi qu'en régime variable, puis son application dans la détermination des
positions
et vitesses angulaires de systèmes tournants.
Remarques préliminaires importantes : il est rappelé aux candidat(e)s que
' o les explications des phénomènes étudiés interviennent dans la notation au
même titre
que les développements analytiques et les applications numériques ;
. tout au long de l'énoncé, les paragraphes en italique ont pour objet d'aider
à la
compréhension du problème ;
. tout résultat fourni dans l'énoncé peut être admis et utilisé parla suite,
même s'il n'a pas
été démontré par les candidat(e)s ;
- aucune connaissance particulière sur les semi--conducteurs n'est requise.
L'effet Hall a été découvert en 1879 par E.H. HALL; celui--ci observe, sur des
bandes de cuivre parcourues par un courant, l'apparition d'une différence de
potentiel
lorsqu'un champ magnétique leur était appliqué. Jusqu'aux années 1960, l'effet
Hall a
été principalement utilisé pour analyser la nature et la concentration des
porteurs de
charge présents dans un solide. L'introduction plus récente de composants à
matériaux
semi--conducteurs, comme l'arséniure d'indium lnAs et l'antimoniure d'indium
lnSb a
permis d'obtenir des tensions de Hall suffisamment élevées pour justifier leur
emploi
dans l'industrie. Les principales applications de cet effet concernent les
gaussmètres,
ampèremètres, wattmètres, multimètres analogiques, compas magnétiques nombre
d'instruments et dispositifs exploitant la mesure de l'intensité et/ou la
direction d'un
champ magnétique ou d'un courant dans un conducteur.
Tournez la page S.V.P.
PREMIERE PARTIE
ETUDE DE L'EFFET HALL
Le référentiel d'étude est rapporté à trois axes orthogonaux Ox, Oy, Oz ; (
u;...u y,Uz )
est la base orthonormée directe associée.
A I REGIME STATIQUE
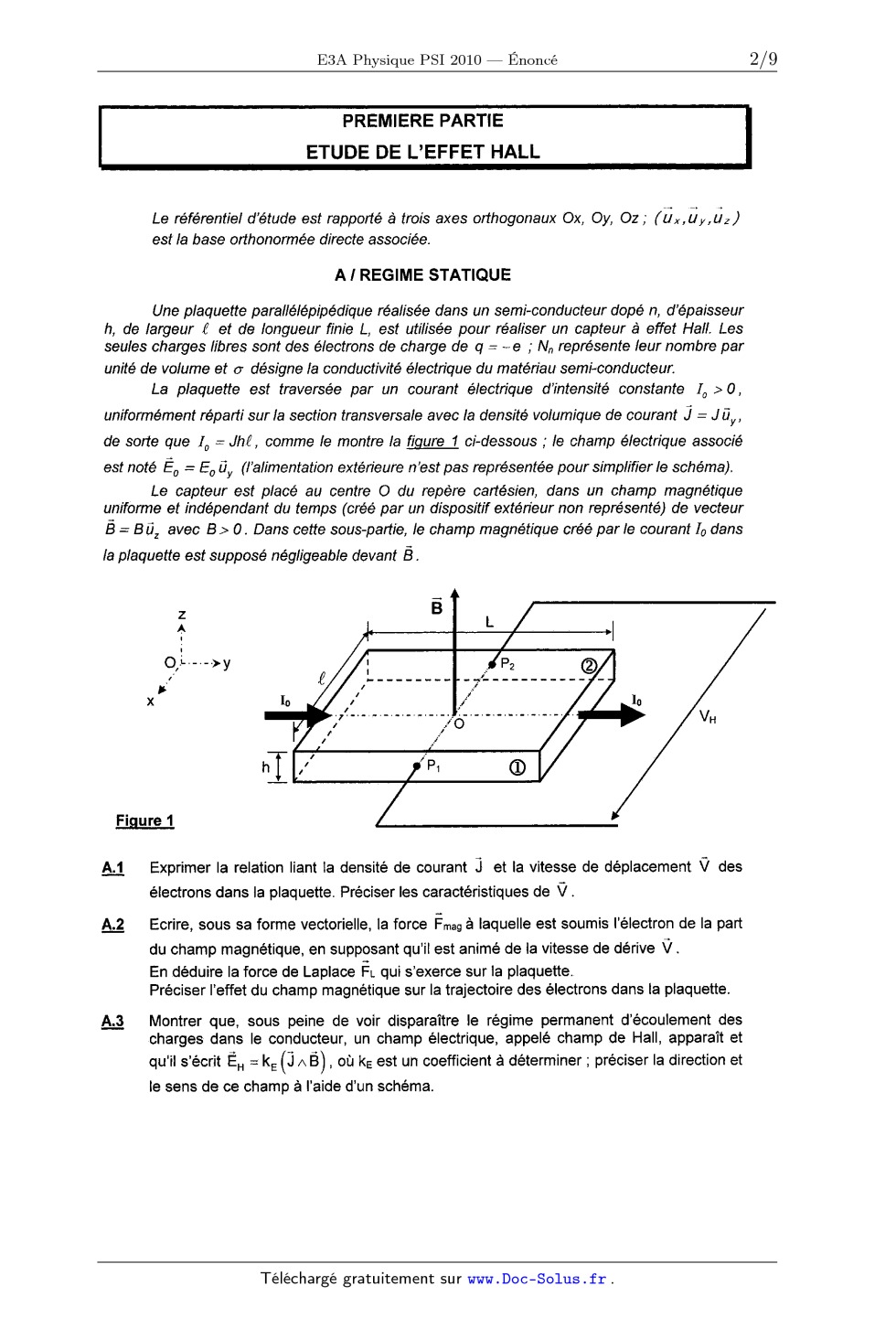
Une plaquette parallélépipédique réalisée dans un semi--conducteur dopé n,
d'épaisseur
h, de largeur EUR et de longueur finie L, est utilisée pour réaliser un capteur
à effet Hall. Les
seules charges libres sont des électrons de charge de q = ----e ; N,,
représente leur nombre par
unité de volume et a désigne la conductivité électrique du matériau
semi--conducteur.
La plaquette est traversée par un courant électrique d'intensité constante la >
O,
uniformément réparti sur la section transversale avec la densité volumique de
courant j : J üy,
de sorte que 10 : JhEUR , comme le montre la figure 1 ci--dessous ; le champ
électrique associé
est noté Ë0 : EO üy (l'alimentation extérieure n'est pas représentée pour
simplifier le schéma).
Le capteur est placé au centre O du repère cartésien, dans un champ magnétique
uniforme et indépendant du temps (créé par un dispositif extérieur non
représenté) de vecteur
-->
B : Büz avec 8 > 0. Dans cette sous--partie, le champ magnétique créé par le
courant la dans
la plaquette est supposé négligeable devant Ë.
Figure 1
A._'l_ Exprimer la relation liant la densité de courant 3 et la vitesse de
déplacement \7 des
électrons dans la plaquette. Préciser les caractéristiques de \7 .
A.2 Ecrire, sous sa forme vectorielle, la force Fmag à laquelle est soumis
l'électron de la part
du champ magnétique, en supposant qu'il est animé de la vitesse de dérive \7 .
En déduire la force de Laplace FL qui s'exerce sur la plaquette.
Préciser l'effet du champ magnétique sur la trajectoire des électrons dans la
plaquette.
A3 Montrer que, sous peine de voir disparaître le régime permanent d'écoulement
des
charges dans le conducteur, un champ électrique, appelé champ de Hall, apparaît
et
qu'il s'écrit ÊH : kE (Ü /\ Ë) , où kg est un coefficient à déterminer ;
préciser la direction et
le sens de ce champ à l'aide d'un schéma.
A.4 En déduire l'existence d'une tension VH : V(P,) --V(P2) dite tension de
Hall, qui apparaît
entre les deux faces opposées @ et @ de la plaquette, puis l'écrire sous la
forme
R . . . .
V : ----"-- 10 B , où RH est le coefficient de Hall qu'il conwendra d'exphmter
en fonchon de
H
h
Nn ete. Analyser le signe de RH.
A.5 Application numérique : Calculer la constante RH et la valeur de B a l'aide
des données
suivantes: 10 = 100 mA, |le =126,7 mv, |\|n =1,7.1022 m'3, e =1,6.10"19 c,
h=0,3mm, EUR=1cm, L=3cm.
A.6 En pratique, un capteur est caractérisé par sa sensibilité. Définir puis
calculer la
sensibilité SB de ce capteur vis-à-vis du champ magnétique.
La constante de Hall varie avec la température ---- carla densité de charges
libres en
dépend -- selon la loi : RH(t)= RH(O).exp(--at), où la température t s'exprime
en degrés
Celsius, avec a = 0,014 ( °C)" pour un capteur en InSb.
_AJ_ Evaluer la variation relative de la tension de Hall VH quand la
température au niveau du
capteur s'élève de 10 degrés. Commenter cette valeur.
_A;._$_ Montrer qu'il existe une relation simple entre la force de Laplace È et
la tension de Hall,
de la forme VH : t', ËL --üx , où Q est un coefficient à déterminer.
Désignons par Ë le champ électrique résultant dans la plaquette traversée par la
densité de courant J, en présence du champ magnétique B.
_I_\_._9_ Montrer que Ê, Îl et B vérifient la loi d'Ohm locale : 3= o[Ê ---kJ
(Ü AB):|, où kJ est un
coefficient à déterminer. En déduire l'expression de Ê en fonction de 3 et B.
3 - -- -- .
.10 Représenter, dans le plan Oxy, les vecteurs --, E et k J(J AB). Tracer les
lignes de
O'
courant, les lignes de champ et les surfaces équipotentielles associées, en
distinguant
deux cas : absence ou présence du champ magnétique.
>
:
Montrer que les lignes de champ électrique et les lignes de courant font un
angle ||| qui
sera exprimé en fonction de B, o et RH. Calculer cet angle \|J pour un champ B
=1T,
sachant que o = 2.104 Q"'.m".
Les deux fils conducteurs sont soudés à la plaquette aux points P1 et P2, de
coordonnées respectives (Æ/2, y,,0) et (--EUR/2, y,,0) avec, théoriquement, y2
: y,.
_A__.12 Estimer le décalage maximum admissible ô=|y2--y1| par rapport à leur
position
théorique, sachant que la mesure doit fournir une tension de Hall V... à 1%
près.
Commenter le résultat; proposer un montage complémentaire pour compenser ce
décalage et préciser le protocole de réglage.
A. __1_3 Etablir, qu'en présence du champ magnétique, la conductivité du
conducteur devient :
o . . . . . , .
o' : -------------------- pws exphcûer le coefflment ?|. Calculer numenquement
o'.
\/1+7æ282 ,
4
B I REGIME DYNAMIQUE
La plaquette est maintenant placée dans un champ magnétique extérieur variable
dans
le temps Bex, : bm (t) üz. Elle possède désormais une longueur L extrêmement
grande devant
les autres dimensions, si bien qu'elle sera considérée comme infinie selon
l'axe Oy.
En l'absence de toute alimentation ( 10 = 0), il apparait dans la plaquette une
densité
volumique de courant électrique induit Î: j(x,t)üy et un champ magnétique 5 ==
b(x, t) üz. La
densité volumique de charges électriques dans la plaquette est nulle et les
propriétés
diélectriques et magnétiques du matériau constituant la plaquette seront
assimilées à celles du
vide (80 =8,85. 10 --'2 F.m'7, ,uo =47r.10 "7 H.m"'}.
Æ Rappeler les équations de Mame" au sein de la plaquette, en se plaçant dans
l'approximation des régimes quasi stationnaires (ARQS).
B.2 Calculer divÎ, puis écrire ËtÎ en fonction d'une dérivée temporelle de b, en
supposant vérifiée la loi d'Ohm locale établie en A.9.
g.; Etablir la relation Iiantj(x,t) à ôb(x't), puis celle entre ô'éx't) et
ôbâÏ't) .
x
.. . .,. . . . _62j ôj.
En deduwe que ](X,t) verifie lequaüon aux denvees partielles suwante . --â--2 =
kD --ô--t, ou
x
ko est un coefficient à déterminer. De quel type d'équation s'agit--il ?
Pour résoudre cette équation différentielle en régime harmonique, écrivons le
champ
magnétique extérieur Bex, : bOex, cos oet üZ avec bOex, cos oet : OEe{bOext
e'""} et la densité de
courant induit _Î : j(x) cos (æt + ça(x)) üy avec j(x) cos(æt + ça(x)) :
'Be{j{x) eir(Xl efwî} _
gg Ecrire l'équation différentielle vérifiée par la densité complexe de courant
1 (X) = 100 ei...)-
Soient 5 : a(1+i) avec i2 = --1 et 2052 : ,u0a)o.
B.5 Justifier, en raisonnant sur les symétries, que j(x,t) est une fonction
impaire par rapport
à la variable x, puis écrire la relation entre _| (--x) et j(x). Vérifier que
j(x) peut s'écrire
sous la forme j(x) =A.f(g x), où A est une constante complexe et f (Ex) est une
fonction à expliciter.
B.6 En déduire l'expression de lg(x). Préciser la parité de cette fonction.
Justifier
qualitativement la condition aux limites: lg(iÆ/2)=b.... Ecrire les expressions
complètes de j(x) et de i3(x) en fonction de b..., k, EUR, 03 et o.
La plaquette est de nouveau traversée par un courant constant d'intensité ] , de
densité uniforme JO : JO üy, se superposent à la densité de courant induit Î=
j(x,t)üy ; ce
courant constant crée dans la plaque un champ magnétique Ëo.
ÈZ_ Montrer, grâce à des considérations de symétrie, que pour un point M (x,
y,z << h) le champ ËO s'écrit: ËO =Bo(x)üz. Préciser la parité de la fonction Bo(x), ainsi que la valeur de Bo(0). Etablir l'expression du champ B0 =kB x üz, où kg est un coefficient à expliciter. --h ---+ Il sera admis que le potentiel vecteur A est de la forme A =A(x,t) Üy et qu'il n'intervient pas dans la tension de Hall instantanée VH(t) entre les faces opposées de la plaquette. Ecrire la superposition des champs magnétiques (È0 et B) et des densités de courant (Îlo et Î) dans la plaquette. En déduire le champ de Hall total, ÊH. En examinant la parité des fonctions JoBo, jb, Job et jB... établir que : 6/2 _. 6/2 R Ô [EH-fix dx= --ï--[BO (x,t)b(x,t)] dx. 4/2 --e/2 "0 ôX En déduire l'expression de VH(t). L'amplitude de cette tension de Hall dépend-elle ou non de l'existence des courants induits dans la plaque ? -->
Déterminer la force de Laplace FL qui s'exerce sur la plaquette. En admettant
que la
relation V = t; - Ê --üX établie en A.8 reste valable, retrouver simplement le
résultat de la
question 8.9.
C [ CAPTEUR DE ROTATION D'UN ARBRE DE MACHINE TOURNANTE
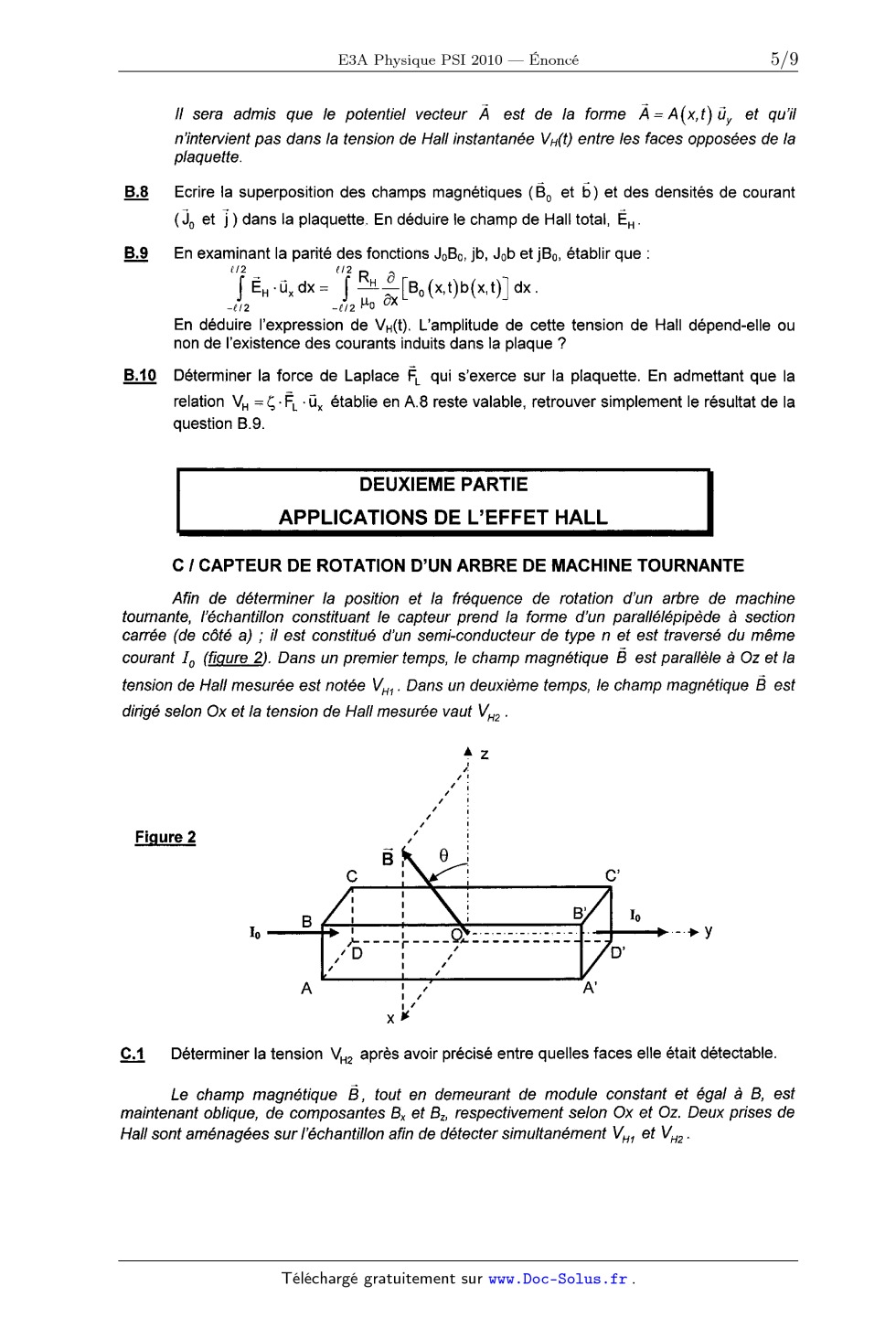
Afin de déterminer la position et la fréquence de rotation d'un arbre de machine
tournante, l'échantillon constituant le capteur prend la forme d'un
parallélépipède à section
carrée (de côté a) ; il est constitué d'un semi--conducteur de type n et est
traversé du même
courant la (figure 2). Dans un premier temps, le champ magnétique B est
parallèle a 02 et la
tension de Hall mesurée est notée VH, . Dans un deuxième temps, le champ
magnétique Ë est
dirigé selon Ox et la tension de Hall mesurée vaut VH2 .
Figure 2
C.1
Déterminer la tension VH2 après avoir précisé entre quelles faces elle était
détectable.
Le champ magnétique É, tout en demeurant de module constant et égal à B, est
maintenant oblique, de composantes BX et 82, respectivement selon Ox et 02.
Deux prises de
Hall sont aménagées sur l'échantillon afin de détecter simultanément V... et
VH2 .
C.2 Montrer que la connaissance de V... et VH2 permet une détermination simple
de la
valeur de l'angle 9 que fait le champ Ë avec l'angle Oz.
C.3 Calculer l'angle 9 à l'aide des données suivantes : V... = 38,0 mV et VH2 :
65,8 mV .
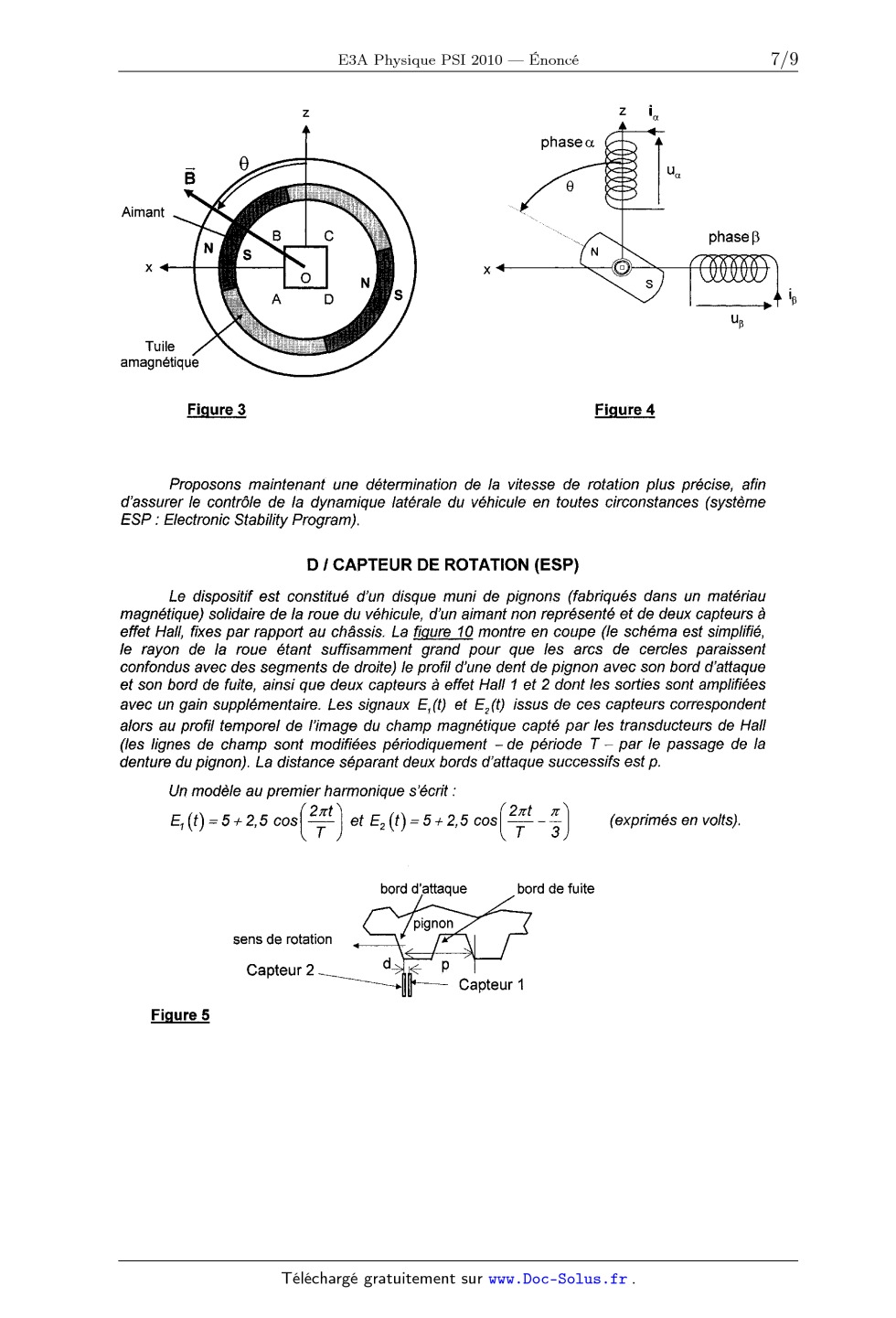
Le montage pratique est représenté de façon simplifiée sur la figure 3. L'axe
Oy de
l'échantillon semi--conducteur est confondu avec l'axe de rotation du moteur
sur lequel les
mesures sont réalisées ; le capteur, placé à l'extrémité de l'arbre dans un
évidement aménagé
à cet effet, est fixe, solidaire du stator.
Dans la cavité, sur la paroi interne et solidaire de l'arbre, sont collées deux
« tuiles » en
forme de quart de cylindre constituées par deux aimants permanents ; entre ces
aimants sont
placés deux compléments amagnétiques de même forme ; l'arbre de rotation, en
acier
magnétique feuilleté, assure la fermeture du flux.
....
Le champ magnétique B est considéré comme uniforme dans la zone où se trouve le
capteur; sa direction est repérée par l'angle & tel que : 9 = (02,8). La
vitesse de rotation
angulaire de l'arbre du moteur est notée .Q.
_Ç_.5_ Déterminer, dans le cas d'une rotation uniforme de l'arbre et le capteur
restant fixe, les
lois d'évolution des tensions V...(t) et V...(t) en fonction du temps, sachant
qu'au temps
t = 0 , 9 vaut 90. Préciser la valeur de la tension maximale en fonction de RH,
B, 10 et a.
C.5 Etablir la relation existant entre f, la fréquence de la tension V...(t) et
la vitesse de
rotation Q = 9--9-- du moteur.
dt
C.6 Expliquer pourquoi l'extrémité de l'arbre doit être feuilletée.
La machine qui est étudiée a deux enroulements de mêmes caractéristiques, a et
,B au
stator et un aimant permanent au rotor; elle est représentée symboliquement en
figure 4 (le
capteur de position est au centre du repère en petites dimensions). La
résistance de chaque
enroulement vaut R. Lorsque la machine fonctionne en génératrice à vide (les
courants ia et
i 5 sont nuls), les tensions induites dans les bobines statoriques sont ea et
el} et se retrouvent
aux bornes des enroulements, de sorte que ua =ea et ufl =efl. Des mesures ont
permis
d'établir que : ea : OEo !? sin( 9 ) et efl : (Do !) cos(9} .
_ç_J_ Donner un schéma électrique équivalent de chaque enroulement i (i= on ou
B) faisant
apparaître la tension d'alimentation u,, e, et R. Justifier la forme des
tensions eu et e,.
En fonctionnement moteur, les enroulements a et ,B sont alimentés par les
courants
la et i 3 sous les tensions U,, et ul}.
C.8 En réalisant un bilan de puissance, déterminer l'expression du couple
électromagnétique Tem en fonction de ea, eB, ia, iB et Q. Montrer que pour une
position 9 donnée, il existe une infinité de couples (i iB) fournissant le
couple
(11
électromagnétique TemSOU souhaité. Représenter dans un repère cartésien (O,ia,
il,) le
lieu des points M de coordonnées (ia, iB) associés au couple TemSOU .
C.9 Etablir l'expression des courants optimaux iQ,'OlDt et iB,Opt donnant le
couple
électromagnétique TemSOU et minimisant les pertes Joule au stator. Montrer
comment
les signaux issus du capteur de position peuvent être mis à profit pour générer
les
courants de référence dans un asservissement de couple.
Îfifi\\
Î'
'
III
Tuile
amagnétîque
Figure 3 Figure 4
Proposons maintenant une détermination de la vitesse de rotation plus précise,
afin
d'assurer le contrôle de la dynamique latérale du véhicule en toutes
circonstances (système
ESP : Electronic Stability Program).
D ! CAPTEUR DE ROTATION (ESP)
Le dispositif est constitué d'un disque muni de pignons {fabriqués dans un
matériau
magnétique) solidaire dela roue du véhicule, d'un aimant non représenté et de
deux capteurs à
effet Hall, fixes par rapport au châssis. La figure 10 montre en coupe (le
schéma est simplifié,
le rayon de la roue étant suffisamment grand pour que les arcs de cercles
paraissent
confondus avec des segments de droite) le profil d'une dent de pignon avec son
bord d'attaque
et son bord de fuite, ainsi que deux capteurs à effet Hall 1 et 2 dont les
sorties sont amplifiées
avec un gain supplémentaire. Les signaux E,(t) et E, (t) issus de ces capteurs
correspondent
alors au profil temporel de l'image du champ magnétique capté par les
transducteurs de Hall
(les lignes de champ sont modifiées périodiquement -- de période T -- par le
passage de la
denture du pignon). La distance séparant deux bords d'attaque successifs est p.
Un modèle au premier harmonique s'écrit :
E (t)--_-- 5 + 2, 5 cos(--2----;Ït] et E, (t): 5 + 2, 5 cos (%ï --%] {exprimés
en volts).
bord d'attaque bord de fuite
sens de rotation
\...Îi Capteur 1
Capteur 2
Figure 5
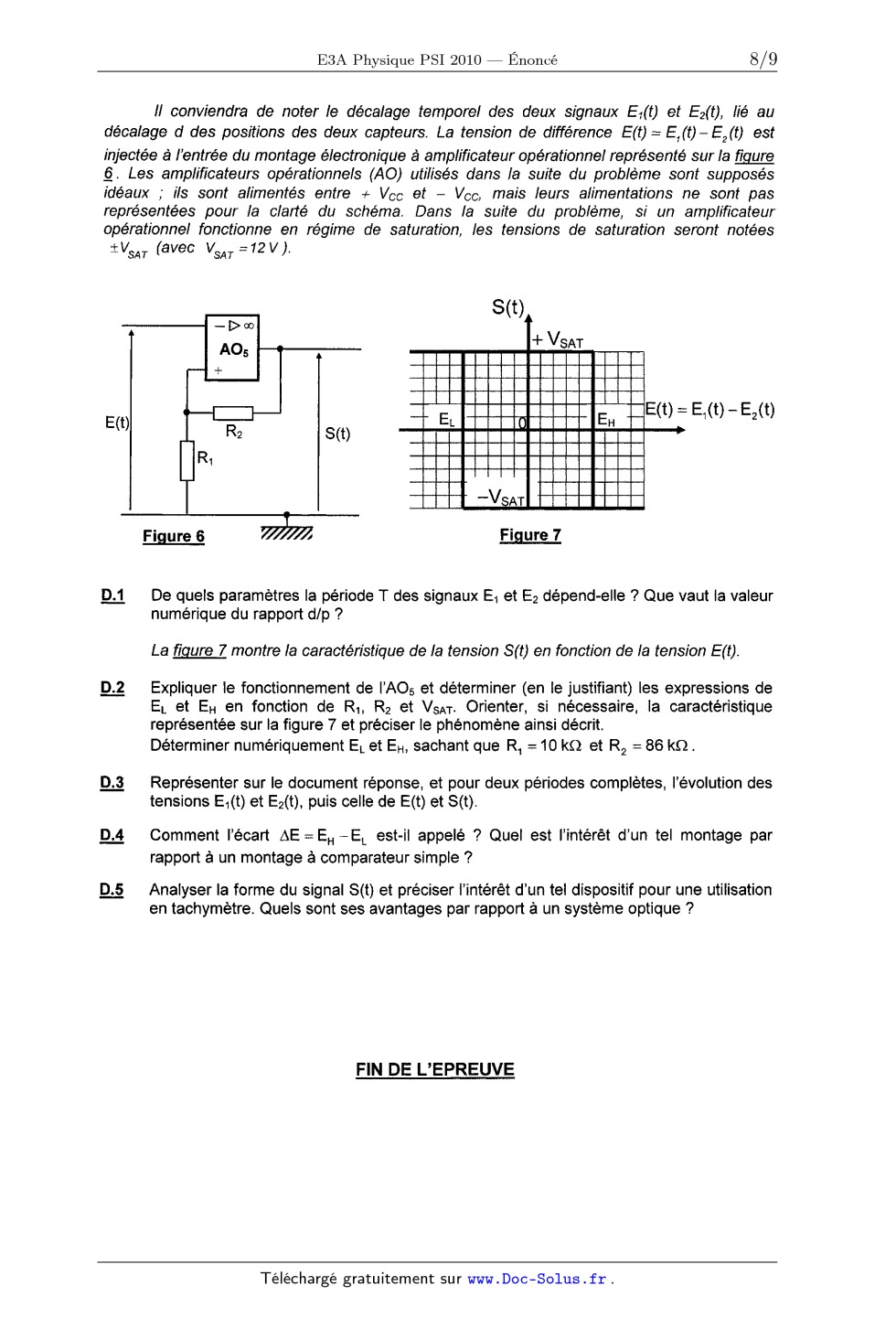
Il conviendra de noter le décalage temporel des deux signaux E1(t) et E2(t),
lié au
décalage d des positions des deux capteurs. La tension de différence E(t) : E1
(t)--EZ (t) est
injectée a l'entrée du montage électronique à amplificateur opérationnel
représenté sur la figure
@. Les amplificateurs opérationnels (AO) utilisés dans la suite du problème
sont supposés
idéaux ; ils sont alimentés entre + VCC et -- VCC, mais leurs alimentations ne
sont pas
représentées pour la clarté du schéma. Dans la suite du problème, si un
amplificateur
opérationnel fonctionne en régime de saturation, les tensions de saturation
seront notées
ÎVSAT {avec VSAT =12 V).
E(t)
I'll III.
V .Il. I'll
'" SAT IIII III-
Figure 7
Figure 6
0.1 De quels paramètres la période T des signaux E1 et E2 dépend-elle ? Que
vaut la valeur
numérique du rapport dlp ?
La figure 7 montre la caractéristique dela tension S(t) en fonction dela
tension E(t).
D.2 Expliquer le fonctionnement de l'A05 et déterminer (en le justifiant) les
expressions de
EL et EH en fonction de R1, R2 et vs.... Orienter, si nécessaire, la
caractéristique
représentée sur la figure 7 et préciser le phénomène ainsi décrit.
Déterminer numériquement EL et EH, sachant que R1 = 10 kg et R2 = 86 kg).
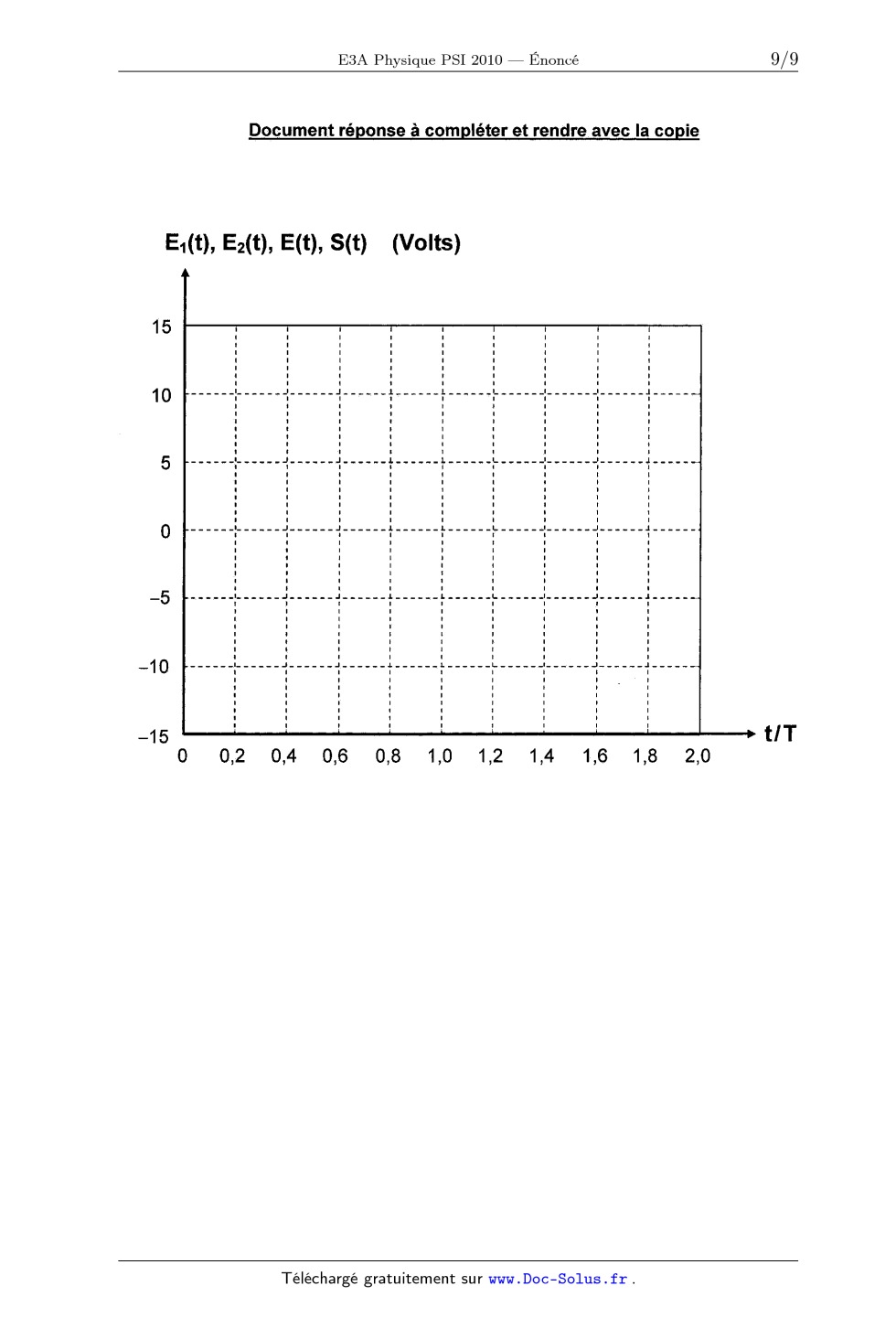
g.g Représenter sur le document réponse, et pour deux périodes complètes,
l'évolution des
tensions E1(t) et E2(t), puis celle de E(t) et S(t).
0.4 Comment l'écart AE =EH ------E,_ est-il appelé ? Quel est l'intérêt d'un
tel montage par
rapport à un montage à comparateur simple ?
D.5 Analyser la forme du signal S(t) et préciser l'intérêt d'un tel dispositif
pour une utilisation
en tachymètre. Quels sont ses avantages par rapport à un système optique ?
FIN DE L'EPREUVE
on
..
o...m oe..._. ©ë .»... N..._. oe.o oe...o .».o Nd o
_ m.u
È .
. . . |. . . . .
. . . . . . . . .
. . . . . . . . .
. . . . . . . . .
. . _ . . . . . .
. . _ _ . . . . .
. . _ . . . . . .
. . . . . . . . .
. . . . . . . . .
ï! lllll ... llllll .... !!!!!! . llllll .... llllll 4 llllll ... IIIIII ...
llllll .| IIIIII . llllll .. OFI!
. . . . . . . . .
. . . . . . . . .
. . . . . . . . .
. . . . . . . . .
. . . . . . . . .
. . . . . . . . .
. . . . . . . . .
. . . . . . . . .
VI... """ fi ...... ' ..... -- ..... J ...... 4 """" 4 ...... 1 ..... 1 .....
-- ..... .L ...!
. . . . . . . . .
. . . . . . . . .
. . . . . . . . .
. . . . . . . . .
. . . . . . . . .
. . . . . . . . .
. . . . . . . . .
. . . . . . . . .
I. ..... .. ...... ... |||||| . ...... ... ...... .. ...... ... ...... ..
uuuuuu .. ...... . ::::::: O
. . . . . . . . .
. . . . . . . . .
. . . . . . . . .
. . . . . . . . .
. . . . . . . . .
. . . . . . . . .
. . . . . . . . .
. . . . . . . . .
I ..... .. ...... . ....... . ...... ... ...... .. ...... ._. ...... ... ......
.. ...... . ....... ©
. . . . . . . . .
. . . . . . . . .
. . . . . . . . .
. . . . . . . . .
. . . . . . . . .
. . . . . . . . .
. . . . . . . . .
. . . . . . . . .
Î ..... .. ...... . uuuuuuu _ ....... . ...... .. ...... .. |||||| .. uuuuuu .
||||||| . uuuuuuu O _'
. . . . . . . . .
. . . . . . . . .
. . . . . . . . .
. . . . . . . . .
. . . . . . . . .
. . . . . . . . .
. . . . . . . . .
. . . _ . _ _ . . DF
.m=o>. Em ...s... à...... .....m
0...QOU OE_ 00>OE 0..-uCOE.. .....OE .OEHËQEOO @ OEOECOQ@.. uCOE--.OOD