
X/ENS Physique PSI 2022
| Thème de l'épreuve | Étude et mesure des séismes |
| Principaux outils utilisés | physique ondulatoire, induction, électrocinétique, mécanique en régime forcé |
| Mots clefs | séismes, accéléromètre, réflexion totale, module d'Young, diagramme de Bode |
Corrigé
:page de présentation 👈 gratuite pour tous les corrigés si tu crées un compte
indications 👈 l'accès aux indications de tous les corrigés ne coûte que 1 € ⬅ clique ici
1 👈 gratuite pour tous les corrigés si tu crées un compte
2 - 3 - 4 - 5 - 6 - 7 - 8 - 9 - 10 - 11 -
12 👈 gratuite pour ce corrigé si tu crées un compte
- 13 - 14 - 15 - 16 - 17 - 18 - 19 - 20 - 21 - 22 - 23 - 24 - 25 - 26 - 27 - 28 - 29 - 30 - 31 - 32 - 33 - 34 - 35 - 36 - 37 - 38 - 39 - 40 - 41 - 42 - 43 - 44 - 45 - 46 - 47 - 48 - 49
Énoncé complet
(télécharger le PDF)












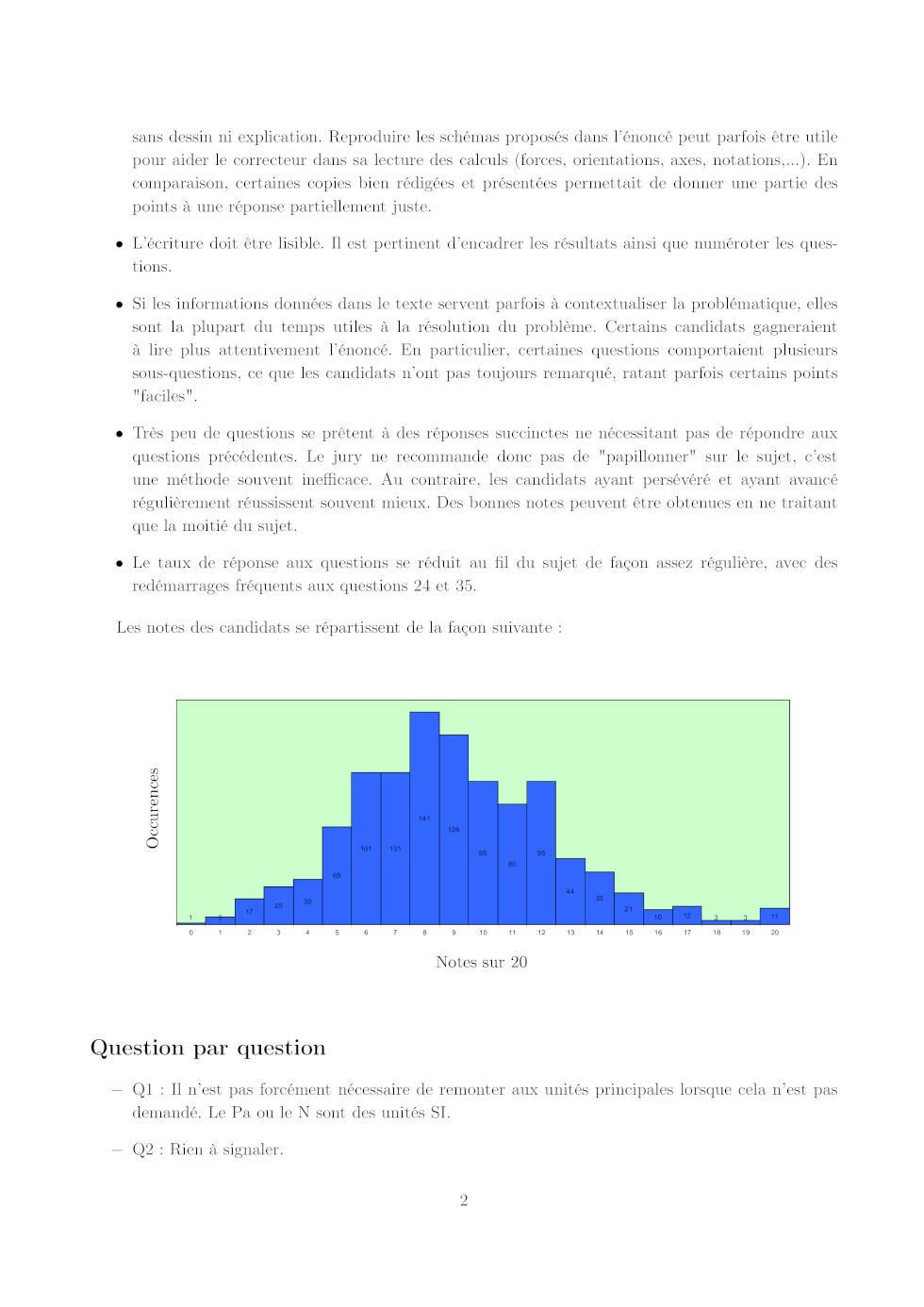
Rapport du jury
(télécharger le PDF)
Énoncé obtenu par reconnaissance optique des caractères
ÉCOLES NORMALES SUPÉRIEURES
ÉCOLE POLYTECHNIQUE
CONCOURS D'ADMISSION 2022
MERCREDI 27 AVRIL 2022
08h00 - 12h00
FILIÈRE PSI
PHYSIQUE (XSR)
Durée : 4 heures
e L'utilisation de calculatrices n'est pas autorisée pour cette épreuve.
Etude et mesure des séismes
Dans ce problème, nous nous intéressons à la propagation des ondes mécaniques
dans un solide pour
caractériser la propagation d'ondes sismiques, générées par un séisme. On
présentera d'abord un modèle
de propagation d'ondes élastiques dans un solide, puis un modèle de source
sismique. On s'intéressera
ensuite à la propagation de ces ondes et les moyens de cartographie du sous-sol
qu'elles fournissent. La
présentation de dispositifs simples de détection des ondes sismiques
constituera la dernière partie. Les
parties trois et quatre sont indépendantes des parties une et deux.
Notations, formulaire et données numériques.
x Valeurs numériques pour le granite : module de YOUNG du granite Égr 7 70 GPa,
masse volu-
mique du granite Pyr © 2500 ke.m *.
x Dans tout le problème, on notera X(t), la grandeur complexe associée à la
grandeur réelle x(t) --
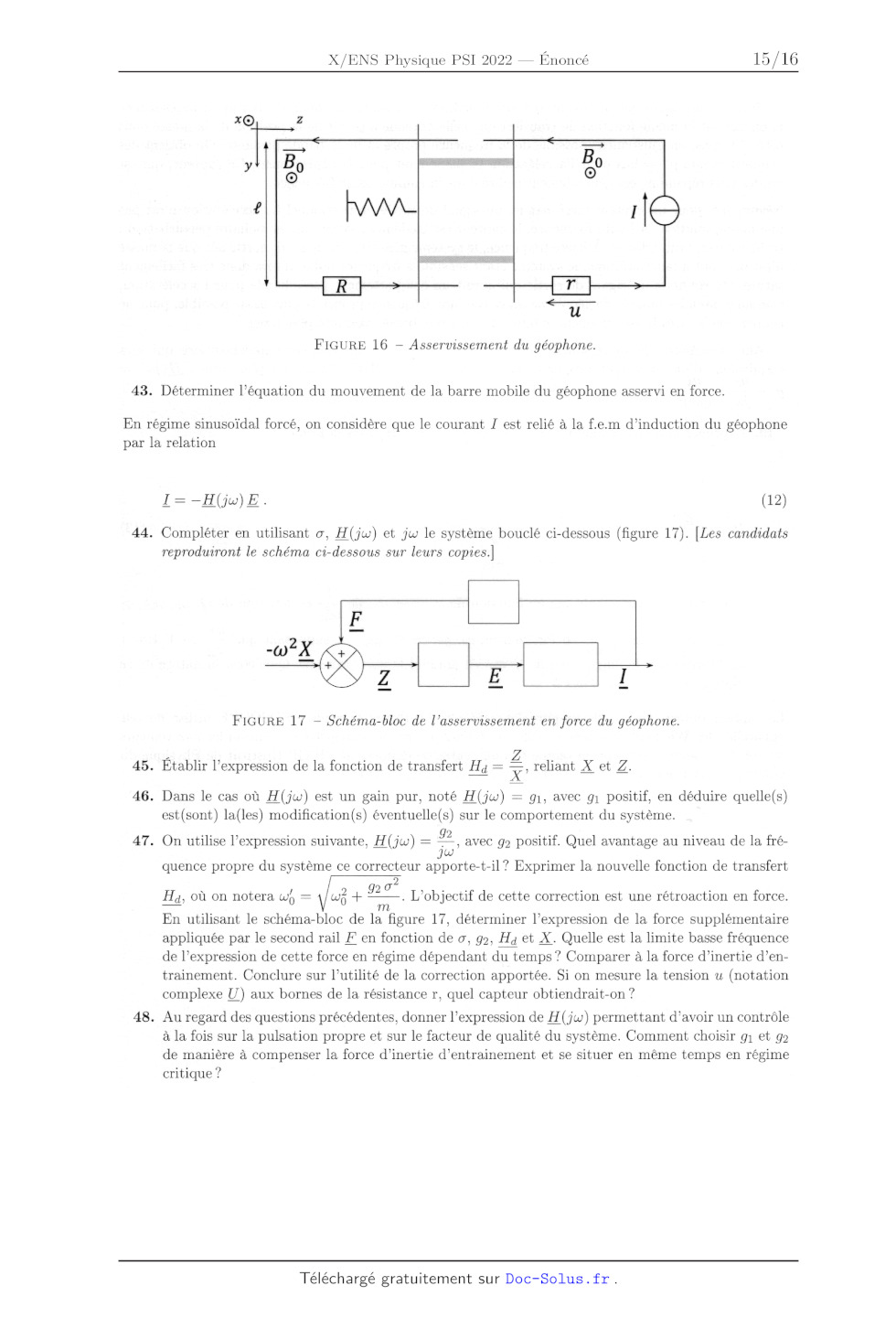
Re(X(t)), harmonique de pulsation w, notée :
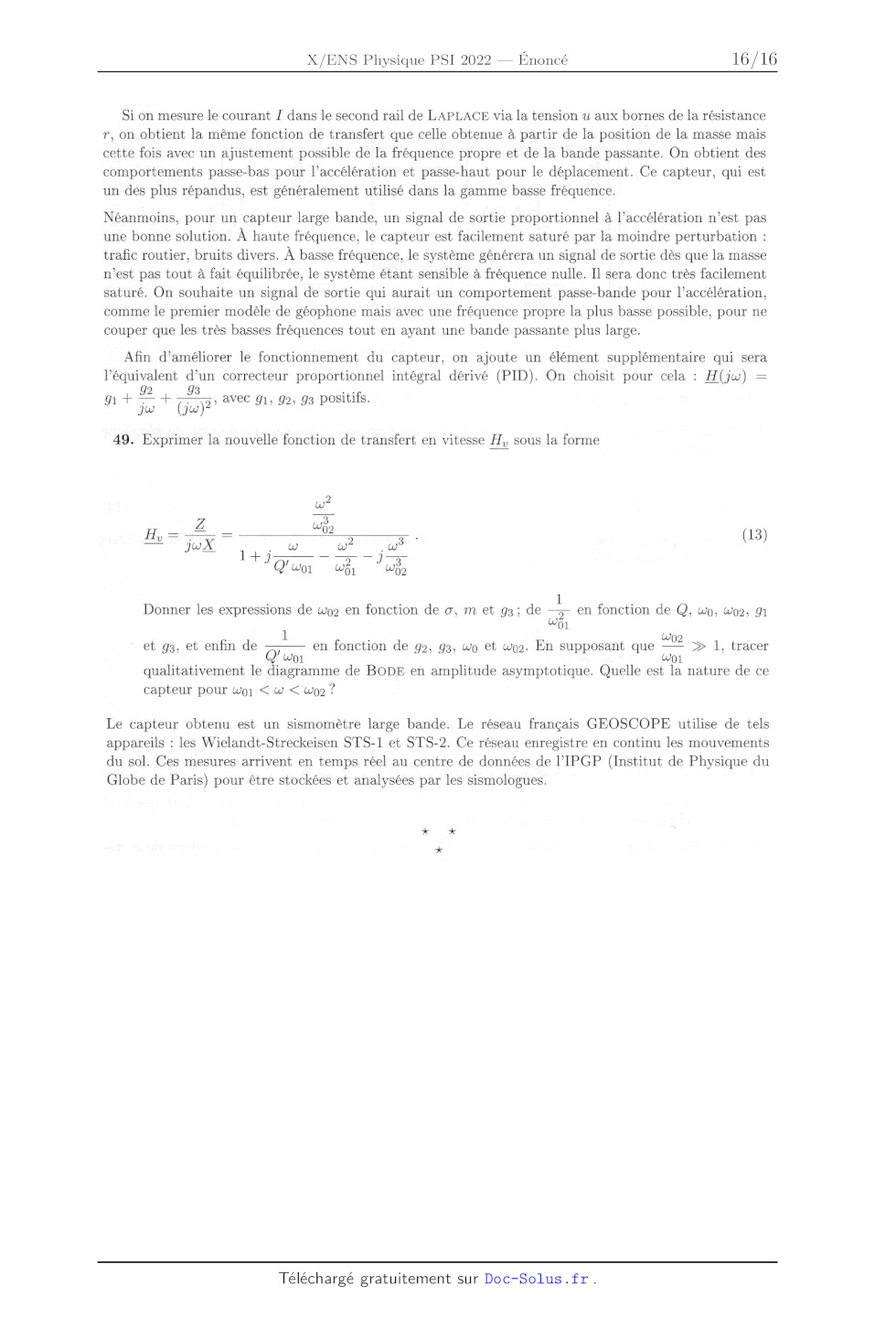
X(t) = Xexp(jut) , (j° = --1)
où À pourra dépendre de la pulsation.
I Ondes mécaniques dans les solides
hu
al |# ©!
FIGURE 1 -- Solide en compression ou en étirement.
On considère un échantillon parallélépipédique de section S, de longueur au
repos L et de masse
volumique p, considérée constante dans tout l'échantillon. Pour caractériser
l'élasticité de l'échantillon.
on lui applique à ses extrémités une traction ou une compression. On notera o
la force par unité de
surface que l'on applique, appelée contrainte dans la suite. La longueur
initiale de l'échantillon passe de
L à L+ AL quand ce dernier est soumis à une force F' (voir figure 1). Tant que
le matériau est sollicité
dans son domaine d'élasticité, ce que l'on considère dans la suite, la
variation relative de longueur est
proportionnelle à la force surfacique appliquée, selon l'expression suivante
donnée par la loi de HOOKE
pour la déformation d'un solide,
AL 1F
L ES.
El
E
avec Æ le module de YOUNG du matériau, caractérisant son élasticité.
1. Par analyse dimensionnelle, déterminer l'unité du module de YOUNG.
2. Dans la limite d'un matériau idéal très rigide, proposer une valeur de Æ.
On s'intéresse maintenant à la propagation d'ondes mécaniques de
compression-dilatation dans ce
même échantillon solide. Le système étudié (figure 2) est une tranche de solide
délimitée par les plans
perpendiculaires à l'axe (Ox), d'abscisses x et x + dx. Cette tranche est
supposée au repos en l'absence
du passage d'une onde mécanique. On note w(x,t) = u(x,t)ez le champ de
déplacement dans le
matériau, à l'abscisse x et à la date t, qui représente à l'instant { la
déformation du matériau pour le
point d'abscisse x, initialement au repos. Ce champ est unidirectionnel et la
déformation est réalisée
selon l'axe (Ox). Au passage d'une onde, à l'instant t, la tranche de solide se
déforme, de telle sorte
que le plan situé à l'abscisse x au repos est déplacé à l'abscisse x + u(x,t)
et celui situé en x + dx est
déplacé en x + dx + u(x + dx,t). Pour toutes ces déformations, on suppose que D
(x, t)
La force par unité de surface (contrainte) est positive dans la direction des x
croissants.
& 1, Vx, VI.
ü(x, t)' dx + dx, t)
--+ --+
TX
x x + dx
FIGURE 2 -- Schéma du système d'étude subissant une déformation selon l'axe
(Ox). Le champ de
déplacement ü est représenté aux abscisses x et x + dx et traduit le
déplacement des deux plans per-
pendiculaires à l'axe (Ox), à un instant t.
3. Exprimer la variation relative de longueur d'une tranche de solide située
entre x et x + dx en
fonction du champ de déplacement u(x,t).
M 10F CT
. Montrer que Sr 5
. Appliquer le principe fondamental de la dynamique à la tranche [x,x + dx] de
solide et établir
l'expression de l'équation d'onde,
OU À
0? 1 0?
Su } = 2 pe et) = 0, (2)
p
où EUR est une célérité, dont on donnera l'expression en fonction de p et E.
Donner le nom de cette
équation.
6. Évaluer numériquement la célérité c, pour le granite (v 7/25 0, 53).
7. Rappeler la distinction entre une onde longitudinale et une onde
transversale. En déduire si
le champ de déplacement, dans la configuration précédente, décrit une onde
longitudinale ou
transversale.
O0
. Montrer que l'équation de propagation précédente (2) est compatible avec la
conservation de
l'énergie mécanique volumique, décrite par l'équation suivante,
0 [1 fôu\* 1 Ou \ O Ou Ou
-- | -p| -- E | -- =--|E---- |).
ot (2e (&) LE (a) | dx 0x n) (3)
Pour établir cette équation, on pourra multiplier l'équation du mouvement (2)
par -- et uti-
Ot
liser l'expression oo = e (Eæ) _o fi (a
Ox? Ot Ox \ Ox Ot Ot | 2 \ Üx
volumique élastique, d'énergie volumique cinétique et le vecteur de POYNTING
décrivant la pro-
pagation unidirectionnelle d'ondes de déformation, en justifiant brièvement.
2
| ] Reconnaître les termes d'énergie
II Mécanisme de génération d'un séisme
Dans cette partie, nous étudions des modèles simplifiés expliquant la
production d'ondes sismiques.
La modélisation de la génération de séismes repose sur la prise en compte
d'efforts de cisaillement à
l'interface entre deux plaques tectoniques. Ce cisaillement va amener la
rupture progressive des micro-
contacts à l'interface entre ces deux couches solides et peut provoquer un
séisme.
IIA Étude d'une couche de solide soumise à un cisaillement
Z ON
DUO NO VOS VO SU Y bit à H
h- > --> --> > --> -- -- -- --> >
FAUX) ü(x, t): u(x + dx,t)
+ +
TF(x, t)
x x + dx
FIGURE 3 -- Schéma d'une couche solide soumise à un cisaillement et en contact
avec un substrat. On
représente les notations uniquement dans le plan en coupe (Ozx).
On considère maintenant une couche de solide de hauteur h, de largeur Æ et de
longueur L, telle
que h EUR H, L. La figure 3 représente la couche de solide, en appui sur un
substrat infiniment rigide.
On applique une force normale ainsi qu'une force de cisaillement en haut de la
couche de solide. On
note la force de cisaillement par unité de surface 7(x,z = h,t) = T.(x,t). Elle
est homogène dans la
direction (Oy) et orientée dans la direction eZ. La force normale par unité de
surface est notée ow.
Elle est homogène sur tout le solide et orientée selon --e2. Le solide peut
glisser sur le substrat. On
note T(x,z = 0,t) = rf(x,t) la force de cisaillement par unité de surface
résultant de ce glissement
à l'interface. On la définit positive dans le sens des x négatifs, c'est-à-dire
selon _£}. On notera or
la réaction normale surfacique exercée par le substrat sur la couche de solide.
Tout mouvement du
solide dans la direction (Oz) est négligé. Le champ de déplacement % ne dépend
que de x et de
t. La déformation longitudinale de la couche induit, comme dans la partie
précédente, l'apparition
d'une force surfacique (contrainte) longitudinale dans la couche. Le lien entre
cette contrainte et la
déformation suit la même loi que dans la partie I.
9. Réaliser un bilan des forces exercées sur une tranche de solide située entre
x et x + dx.
10. Appliquer le principe fondamental de la dynamique à cette même tranche et
en déduire que la
dynamique du champ de déplacement ü (x, t) est donnée par l'équation suivante :
Ou 1 Ou
D go AUe@t) 71) (4)
où À sera à déterminer.
11. Que devient l'équation de conservation de l'énergie mécanique volumique
(3), déterminée dans la
partie T1? Donner la signification physique des nouveaux termes apparaissant
dans cette équation.
Quel terme pourrait traduire un échauffement de l'interface ?
IILB Premier modèle quasi-statique de fracture
On va maintenant considérer qu'une perturbation sous forme d'un glissement du
système, décrite
par le champ de déplacement a (x, t), évolue sur une distance caractéristique £
et pendant une du-
rée caractéristique T' (figure 4). On notera uo l'amplitude typique de la
déformation caractérisant la
perturbation et m le cisaillement typique auquel est soumis le système.
ON
v v * Y v VON Y Y +
h -- mails --> se mix > > > -- --
T -> Ne: Munre > > -}>
Co
-> NN te Murs)
-> hr U(x, ©) -}>
-> SAR ver > --> ++
Cf D'UN 2 ES Ps
<-- <-- <-- <-- <-- <-- <-- <-- <-- = >
--Y? ? L X
FIGURE 4 -- Schéma du système d'étude soumis à différentes contraintes
développant une perturbation
de taille typique £.
On désigne par g la grandeur adimensionnée correspondant à une grandeur g
quelconque.
12. Montrer que l'équation adimensionnée se met sous la forme
2 d'à dü(x,t) TE
Te > me RER RE A + T T,t --T L, L . O
à: 0x' 0 Eh (6,4) -- Fr(,8)) (5)
l . . 92 . , » e A
On suppose que -- EUR EUR. Simplifier l'équation précédente (5) en faisant
apparaître un rapport
sans dimension construit à partir de £, h, uo, To et E.
13. Interpréter ce rapport sans dimension comme le rapport de deux forces
s'exerçant sur le système
au passage de la perturbation. On précisera leur nature.
e Dans la suite de cette partie, on considère que le système étudié est
gouverné par l'équation (7),
issue de la limite quasi-statique de l'équation (4),
T(x Eu à t) (7)
f\? Ox? RNEN
On va maintenant considérer le contact entre la couche de solide et le substrat
pour modéliser le
comportement de 7;(x,t). Pour cela, on adopte un modèle de frottement de
COULOMB. On considère
deux solides en contact. On note V: /2 la vitesse de glissement du solide 1 par
rapport au solide 2 et
f le coefficient de frottement caractérisant le contact entre les deux solides.
La force de réaction du
solide 2 sur le solide 1 est composée d'une réaction normale N et d'une
réaction tangentielle T' telles
que, à la limite du glissement et en glissement, on a la relation pour le
frottement de glissement :
IT ISIN IL (8)
où T est dans la direction opposée au vecteur vitesse, comme représenté sur la
figure 5.
N
V1 /2
"3
(1)
(2)
FIGURE 5 -- Schéma représentant la force de réaction du solide 2 sur le solide
1.
1
. En adaptant ce modèle de frottement solide à l'étude du système, établir
l'expression de ry(x,t)
lorsqu'une zone de l'interface glisse. On notera 7, = fon.
15. Dans une zone où le solide ne glisse pas, traduire la condition de
non-glissement comme une
condition aux limites sur le champ de déplacement u et donner l'expression de
la contrainte 7.
Fo
FIGURE 6 --- Représentation schématique de la zone de glissement de la couche
solide dans le modèle
quasi-statique. Le profil du champ de déformation u(x) est représenté en trait
continu noir.
e On considère la situation, schématisée sur la figure 6, où la force
surfacique de cisaillement sur le
haut de la couche est constante au cours du temps et uniforme, telle que T(x,t)
= T.. Une zone de
taille 24, a déjà glissé. Dans cette zone, on a donc 7Ty(x,t) = Tr.
16. Déterminer l'expression du champ de déformation u(x), en régime
quasi-statique, le long de
l'interface, c'est-à-dire à l'intérieur de la zone en glissement, et à
l'extérieur de cette zone.
17. En utilisant l'expression de l'énergie potentielle volumique élastique
obtenue dans le bilan local
d'énergie (3), établir l'expression de l'énergie potentielle élastique Æ4 de la
couche de solide. En
déduire si la présence de la zone de glissement induit une perte ou un gain
d'énergie pour la
couche de solide, par rapport à une situation de non-glissement.
pen
_
Exprimer le travail des forces de cisaillement W.;, de part et d'autre de la
couche de solide
étudiée, intégré sur tout le volume de solide.
e Dans la suite de cette partie, on modélise la croissance de la zone glissante
de l'intervalle [--£,, £,]
à [--Cy -- dly, Lg + d£,]. La croissance de la zone glissante est schématisé
sur la figure 7.
ON
v Y Y Y +
h -- --> --> -- -- --
Te
ur É. eee es.
(Ltd) --Lg ty dsvde,: L *
FIGURE 7 -- Croissance de la zone de glissement de la couche solide.
L'intervalle initial de la couche
glissante [--L,,£4,] s'accroît pour donner un intervalle [---£, -- d£,, Ly +
dll.
19. Pour une avancée de taille 2d{, de la zone glissante selon la direction
(Ox), établir le taux
cis
2d4,
Comparer ces variations et en déduire la présence d'un surplus d'énergie.
d'accroissement du travail des forces de cisaillement et celui de l'énergie
élastique
e
2dé,
Lt d(Wiis -- E.)
H d(24,)
Exprimer G en fonction de 7e, Tr, {,4, E et h. G représente une accumulation
d'énergie, différente
d'un stockage d'énergie sous forme élastique. Comment cette accumulation
d'énergie pourrait
être utilisée au niveau de l'interface ?
20. On définit G comme le taux de restitution d'énergie surfacique, tel que
G(2£,) =
e Le coût énergétique par unité de surface glissante créée est notée G.; c'est
une constante du
matériau qui caractérise l'interface. On interprète physiquement G. comme
l'énergie surfacique de
fracture des micro-contacts au niveau de l'interface. Les micro-contacts sont
responsables de l'adhérence
de la couche solide sur le substrat et du frottement existant entre la couche
et le substrat.
21. En déduire une condition entre G(24,) et G permettant la progression de la
zone glissante.
22. On étudie dans cette question les cas limites qui vont engendrer un séisme.
Déterminer l'expres-
sion de :
x la taille limite L, d'une zone glissante stable, à contrainte de cisaillement
7. fixée, en-dessous
de laquelle il n'y aura pas progression du glissement.
x le seuil limite rl" de la contrainte de cisaillement, pour une taille de zone
glissante 2l,
fixée, au-delà duquel l'interface sera déstabilisée.
23. Calculer et commenter l'évolution de la zone glissante. Sera-t-elle stable
ou instable ?
dG
d(24,)
Dans le cas où G(24,) > Ge, expliquer comment évoluera la zone glissante
(fracturée). L'énergie
cinétique volumique de la couche de solide augmente-t-elle ?
III Propagation d'ondes sismiques
Lorsqu'un séisme survient, des ondes élastiques sont produites et se propagent
dans les différentes
parties de la croûte terrestre, assimilées à des solides. Ces ondes mécaniques
de déformation, appelées
ondes sismiques, peuvent être de deux types :
+ des ondes de compression-dilatation ou ondes P :
+ des ondes de cisaillement ou ondes S.
Les ondes P sont analogues à celles étudiées dans la partie I.
Dans cette partie, nous modélisons le parcours des ondes sismiques à travers
les différentes couches
de la croûte terrestre, et notamment au passage d'interfaces entre différentes
couches. Le vocabulaire
de l'optique géométrique et certaines analogies avec l'optique géométrique
seront mobilisés dans cette
partie.
III.A Loi de Snell-Descartes pour des ondes sismiques à une interface
On va considérer dans cette partie une interface plane séparant deux milieux
solides caractérisés
par des célérités d'ondes de compression différentes, respectivement c1 et cp2.
Le plan de l'interface
est le plan (O, e. ey) et le plan orthogonal à l'interface représenté sur la
figure 8 est donné par le plan
(O, eZ, e2). Une onde plane progressive harmonique de pulsation w se propage
dans le milieu (1), situé
dans le demi-espace 2 < 0, et rencontre l'interface avec un vecteur d'onde k;, faisant un angle à, avec le vecteur normal à l'interface. Elle donne naissance à une onde réfléchie de vecteur d'onde k,., faisant un angle r avec la normale ainsi qu'à une onde transmise, dans le milieu (2), situé dans le demi-espace z > 0, de vecteur d'onde k; faisant un angle 2 avec la normale. Les ondes
incidente, réfléchie et
transmise sont modélisées par le champ de déplacement associé aux ondes de
compression-dilatation
et sont notées respectivement : uw (M. t), u, (M, t) et u (M. t), où M est un
point de l'espace repéré par
ses coordonnées dans le repère (O, ez. y; ei). On note I le point matérialisant
l'intersection des rayons
sismiques, associés aux ondes incidente, réfléchie, et transmise au niveau de
l'interface.
0 I é
Cp2
l2
ke
e,
FIGURE 8 -- Interface entre deux solides de célérités d'ondes de compression
différentes, respective-
ment Cp1 et Cp2. La propagation des ondes de déformation est représentée à
travers les vecteurs d'onde
incident, réfléchi et réfracté.
Les expressions des champs de déplacement au point M à l'instant { en notation
complexe sont les
suivantes :
w(M,t)+u (Mt) siz 0
2
Êl
Ir
--
+x onde incidente : TM -- Ü;o EXP 3 (ui -- k;.
5.
|
> -- k:
x onde réfléchie : ü, = Ü,0 exp 5 (ut -- k.OM)| ED
k,
> -- k!
x onde transmise : 4} -- Uyo exp 5 (ut -- OM) TE
k
24. Nous supposons que les composantes tangentielles à l'interface des vecteurs
d'onde k;z, k,x et ktx
sont égales. On notera k, cette valeur. Définir le plan d'incidence et rappeler
la première loi de
DESCARTES. À partir de l'égalité des composantes tangentielles des vecteurs
d'onde, retrouver la
seconde loi de DESCARTES pour les ondes élastiques au passage de l'interface.
Donner l'expression
de k; en fonction de w, sin i1 et C1.
e On considère dans la suite de cette partie que Cy1 < Cp2. 25. Montrer qu'il existe un angle d'incidence limite, noté ?y, et donner son expression en fonction des célérités des deux milieux. 26. Dans le cas où l'onde incidente arrive sur l'interface avec un angle 1 > 1,
exprimer k, en fonction
de w, sin 41, cos 1, C1. Montrer que k;, se met sous la forme --=, où on
précisera la dimension et
l'expression de Ô en fonction de w, c,2, sin 41 et sin 7. Justifier alors que
l'onde transmise, polarisée
suivant e;, peut se mettre sous la forme suivante :
1Ë
Ô
On admettra que la direction de vibration est ez. Caractériser la structure de
cette onde et
donner l'expression de sa vitesse et de sa direction de propagation.
u (M, t) = Uo exp ( ) exp 3 (wt -- k:x) | eZ. (9)
À partir de maintenant, on interprète la propagation d'ondes sismiques en
utilisant la
marche de rayons sismiques, équivalents aux rayons lumineux pour les ondes
lumineuses.
"Of 4 4
TS, # s #
*
VAN
Cp1 / 1, NV NS #
pe 4 / / FA ES f f \ AA Ô
Î / f ! 2 / \ FA \ ve.
Éy © | NPA # [ LAS se < j f a i É | i Je | PE e Ü;0 cos | wt -- -- x FIGURE 9 -- Génération d'un cône de MACH. e Dans le cas où 1 -- ÿy, l'onde transmise (9) perturbe l'interface entre les milieux (1) et (2). La conséquence de cette perturbation est une ré-émission d'ondes dans le milieu 1 par une source se déplaçant à l'interface plus vite que la célérité des ondes dans le milieu 1. Les ondes ré-émises, représentées par une série de cercles sur la figure 9, vont contribuer à créer un front d'onde, appelé cône de MACH, représenté par une ligne en pointillés tangente à ces cercles. 27. La normale au cône de MACH définit la direction de l'onde ré-émise. Déterminer l'angle 6. entre le front d'onde de MACH et l'interface. On exprimera sin #4. en fonction des célérités Cp1 et Cp2. Justifier, à partir du schéma représenté sur la figure 9, que l'angle entre l'onde ré-émise et la normale à l'interface est égale à l'angle d'incidence limite y. IIIB Principe de réfraction sismique Une des applications majeures de la sismologie est la détermination de la distribution des vitesses des ondes sismiques en sous-sol pour en déduire les propriétés élastiques des différentes enveloppes de la Terre. Pour les études sismologiques, les données principales sont les durées de trajet des ondes de la source au récepteur, déterminées à partir des temps d'arrivée mesurés au niveau du récepteur. On s'intéresse donc à la durée du trajet définie par l'expression suivante : T{s,r}) = lat | (10) où v(x) est la vitesse des ondes le long d'un rayon sismique. Le problème est de déterminer, à partir des temps de trajet, u(x) pour les différentes couches de la Terre. En profondeur, la Terre n'est pas homogène, et on s'attend à sonder plusieurs interfaces entre milieux de vitesses d'ondes différentes. Ces interfaces vont produire des réflexions et des réfractions. e Nous considérons la situation simplifiée d'une couche solide de hauteur h et de célérité des ondes P dans cette couche c1. Cette couche est située au-dessus d'un demi-espace infini de célérité d'onde c2, telle que c2 > c1. On place une source en (x,,2$) = (0,0) et un récepteur en
(x,,2,) = (x,0). I y a
trois trajets possibles pour aller du point s au point r, comme représenté sur
la figure 10, et l'objectif
est de calculer les durées respectives de trois parcours.
ey © S T .
é,
C1
h
C2
ê,
FIGURE 10 -- Exemples de trajets des ondes D, R et H. Le milieu situé entre
l'altitude z =0 etz=h
possède une célérité c1, celui situé de z = h à + a une célérité c2.
28. Supposons que l'onde se propage le long de la surface de la couche de
hauteur À et atteigne le
récepteur directement. Déterminer la durée du trajet Tp(x) de cette onde,
appelée onde D ou
onde directe.
2
©
. Si l'onde est réfléchie à l'interface entre les deux milieux 1 et 2,
déterminer la durée du trajet
TrR(x) de cette onde, appelée onde R ou onde réfléchie. Déterminer les valeurs
asymptotiques de
cette durée quand x = 0 et quand x -- oo.
30. Quand un rayon sismique issu de la source arrive à l'interface entre les
deux milieux avec un
angle d'incidence égal à l'incidence limite #7, expliquer le comportement du
rayon sismique. Peut-
il atteindre le récepteur ? Déterminer la durée de trajet Tx(x) pour ces ondes
dites réfractées, ou
ondes H,
3
en
TL
Tx(x) -- Co + Ti ; (11)
avec T1 à déterminer en fonction de h, EUR; et co. Etablir une condition sur x
pour que ces ondes
existent et atteignent effectivement le récepteur.
. L'obtention des durées de trajets précédentes permettent de cartographier la
géologie souterraine.
Pour les trois ondes précédentes (D, R, H), tracer sur un même graphique les
différents temps
d'arrivée en fonction de l'abscisse x du récepteur. Déduire une distance x4 à
partir de laquelle
l'onde réfractée (onde H) est détectée en premier par le détecteur. Quelle est
la forme de la
courbe qui matérialise les premiers temps d'arrivée d'onde à chaque récepteur ?
Quels types
d'ondes participent à la forme de cette courbe ?
Distance (m)
Temps (ms)
FIGURE 11 -- Sismogramme du sous-sol de la vallée du Connecticut, tiré de
"Introduction to applied
geophysics", de H. Robert Burger, Anne F. Sheehan et Craig H. Jones.
32.
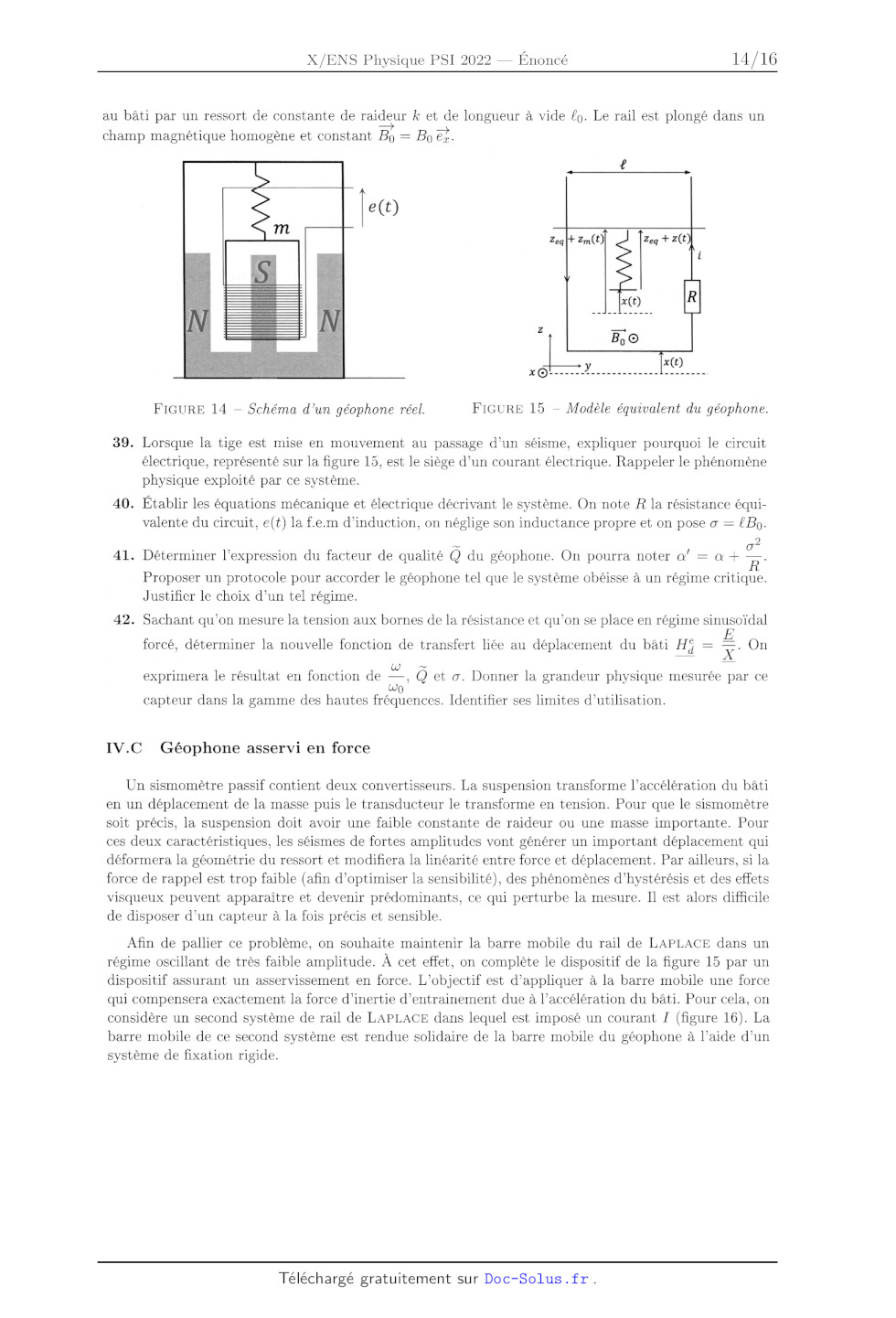
39.
La figure 11 représente un sismogramme issu d'une campagne de mesures dans la
vallée du
Connecticut (Massachusetts, USA), où les explosions générant les ondes
sismiques sont contrôlées
(à la différence de la survenue d'un séisme). La date t -- 0 correspond au
démarrage de l'excitation.
La détection des premières ondes sismiques est repérée par une flèche. On
considère qu'il n'y a
que deux couches souterraines qui sont sondées par les ondes émises. Commenter
ce sismogramme
et justifier que les résultats sont conformes aux prédictions de la question
précédente. Déterminer
la vitesse des ondes dans chaque couche souterraine ainsi que x4 et la hauteur
À de la première
couche. Expliquer ce qui peut limiter la portée de la méthode en profondeur.
On va généraliser la méthode précédente à une situation où plusieurs couches,
deux en tout,
surplombent un demi-espace, telles que EUR1 < EUR2 < c3 et de hauteurs respectives h1 et h2. Quels sont les différents trajets possibles des ondes ? Quel est l'angle d'incidence 4, avec lequel le rayon doit arriver sur l'interface 1/2 pour que l' angle d'incidence à l'interface 2/3 soit i,(2/3) ? Déterminer l'expression du temps d'arrivée des ondes réfractées entre les couches 2 et 3. Tracer qualitativement sur le graphique représentant les temps d'arrivée : des rayons directs, des rayons réfractés à l'interface 1/2 et ceux réfractés à l'interface 2/3. Quelle information donne la courbe des premiers temps d'arrivée des rayons sismiques ? 34. Qualitativement, que se passe-t-il si la couche 2 est une zone de basse vitesse, c'est-à-dire si c2 < C1 < C3? Quels sont les rayons qui existent ? En déduire alors la (ou les) limite(s) principale(s) de cette méthode. Nous avons vu comment exploiter les temps d'arrivée des ondes réfractées pour obtenir une carto- graphie de la géologie du sous-sol. Cette technique de réfraction sismique a démontré sa robustesse mais a néanmoins quelques limitations. Vers les années 1930, la méthode de réflexion sismique exploitant les temps d'arrivée des ondes réfléchies a commencé à remplacer, ou à compléter selon les situations, la réfraction sismique. Cette dernière reste prédominante pour les études de faible profondeur. IV Détection des ondes sismiques : principe du géophone Dans les parties précédentes, nous avons abordé la génération d'ondes sismiques lors d'un séisme au niveau de la frontière entre deux plaques tectoniques, puis le mécanisme de propagation d'ondes sismiques dans les différentes enveloppes terrestres. On va maintenant s'intéresser aux outils de détec- tion. IV.A Sismomèêtre mécanique Dans toute la suite, on considère que tous les mouvements sont unidirectionnels et selon l'axe vertical (Oz). Z(t) 0 FIGURE 12 -- Schéma de principe d'un sismomètre mécanique. Un sismomètre (figure 12) est un système oscillant constitué d'un bâti, auquel est suspendu par un ressort de constante de raideur k et de longueur à vide {5 une masse m. La masse subit un amortissement visqueux modélisé par une force de frottement fluide de coefficient a telle que f, = --avm(t) eZ, où Um(t) désigne la vitesse de la masse m dans le bâti. On note z(t) le paramétrage du mouvement de la masse dans le bâti. 35. Déterminer la position z, d'équilibre de la masse au repos sans secousse du sol. e Lorsqu'un séisme se produit, l'arrivée de l'onde sismique sur le sismomètre provoque un mouvement du bâti de l'appareil. On note x(t), le déplacement du bâti selon l'axe vertical (Oz), dans le référentiel terrestre (voir figure 13). On note 4 + 2m(t) le mouvement de la masse dans ce même référentiel, Zeq + Z(t) le mouvement de la masse dans le référentiel lié au bâti. 36. Établir l'équation du mouvement à laquelle obéit z,(t), et en déduire celle pour z(t). Z k£o k, Lo : Er À À m À D 4 À Zeq + Z(t) Zeq + Zm(t) Zeq + Zm(t) Zeq + Z(t) 0 x(t) | FIGURE 13 -- Paramétrage du sismomètre mécanique au passage d'un séisme modélisé par une excita- thon du bâti. | | -- d°x ... Dans la suite, la force effective appliquée au système f;. -- MT ee est appelée force d'inertie d'entraînement et modélise l'influence du déplacement du bâti. e On considère, dans les questions suivantes, un régime sinusoïdal forcé tel que l'excitation du sismomètre, æ(t), s'écrit æ(t) -- Xpcos(wt). On utilisera la notation complexe pour les grandeurs sinusoïdales sous la forme x(t) = Me (X exp (jwt)), rappelée au début du problème. On notera wp = \/k/m la pulsation propre du système et Q = muwo/a son facteur de qualité. 37. Établir l'expression de la fonction de transfert du sismomètre en déplacement HF -- w _ ue. forme canonique en fonction de -- et Q. Tracer qualitativement le diagramme de BODE en wo amplitude de la fonction de transfert H7°, en supposant que le facteur de qualité vaut JL On se limitera aux comportements asymptotiques de la fonction de transfert pour le tracé du diagramme. Dans les différentes gammes de fréquences, à quelle grandeur physique (déplacement, vitesse ou accélération) le déplacement z est-il proportionnel ? Préciser ainsi la nature du capteur dans les différents régimes (capteur de déplacement, capteur de vitesse, accéléromètre). 3 Q0 . À très basses fréquences, donner l'expression approchée de l'équation du mouvement. En suppo- sant que la résolution d'un appareil de mesure lié au sismomètre est Az, en déduire quelle est l'accélération minimale que le sismomètre peut résoudre. Comment choisir les paramètres de la pulsation propre du système pour optimiser cette résolution ? IV.B Fonctionnement du géophone Une mesure analogique (ou numérique) du déplacement du système oscillant nécéssite un transduc- teur. Le dispositif réel de détection est une masse m fixée à une bobine qui peut osciller dans l'entrefer d'un aimant. La bobine est alors soumise à l'action d'un champ magnétique orthoradial. Le principe de fonctionnement de ce dispositif, appelé géophone réel, est le même que celui d'un haut-parleur (le géophone réel est représenté sur la figure 14). Dans la suite, on adopte une modélisation simplifiée de ce dispositif, reposant sur un modèle équivalent de rail de LAPLACE, décrit sur la figure 15. Le dé- placement x(t) désigne, comme dans la partie précédente, le mouvement du bâti résultant du passage de l'onde sismique, 2e + 2m(t) le mouvement de la barre dans le référentiel terrestre et 2, + z(t) le mouvement relatif de la barre dans le référentiel lié au bâti du rail de Laplace. Cette barre est liée au bâti par un ressort de constante de raideur k et de longueur à vide 4. Le rail est plongé dans un champ magnétique homogène et constant Bo = Bo cé, e(t) eqlt Zm(t) N Z Bo © | L-- x) TL FIGURE 14 -- Schéma d'un géophone réel. FIGURE 15 -- Modèle équivalent du géophone. 3 < Lorsque la tige est mise en mouvement au passage d'un séisme, expliquer pourquoi le circuit électrique, représenté sur la figure 15, est le siège d'un courant électrique. Rappeler le phénomène physique exploité par ce système. 4 Établir les équations mécanique et électrique décrivant le système. On note R la résistance équi- valente du circuit, e(t) la f.e.m d'induction, on néglige son inductance propre et on pose o = {B5. 2 O A1. Déterminer l'expression du facteur de qualité Q du géophone. On pourra noter &@ = à + --. bad Proposer un protocole pour accorder le géophone tel que le système obéisse à un régime critique. Justifier le choix d'un tel régime. 4 Fe Sachant qu'on mesure la tension aux bornes de la résistance et qu'on se place en régime sinusoïdal . On forcé, déterminer la nouvelle fonction de transfert liée au déplacement du bâti H° -- 7 . À . CN x h exprimera le résultat en fonction de --, Q et &. Donner la grandeur physique mesurée par ce capteur dans la gamme des hautes fréquences. Identifier ses limites d'utilisation. IV.C Géophone asservi en force Un sismomètre passif contient deux convertisseurs. La suspension transforme l'accélération du bâti en un déplacement de la masse puis le transducteur le transforme en tension. Pour que le sismomètre soit précis, la suspension doit avoir une faible constante de raideur ou une masse importante. Pour ces deux caractéristiques, les séismes de fortes amplitudes vont générer un important déplacement qui déformera la géométrie du ressort et modifiera la linéarité entre force et déplacement. Par ailleurs, si la force de rappel est trop faible (afin d'optimiser la sensibilité), des phénomènes d'hystérésis et des effets visqueux peuvent apparaître et devenir prédominants, ce qui perturbe la mesure. Il est alors difficile de disposer d'un capteur à la fois précis et sensible. Afin de pallier ce problème, on souhaite maintenir la barre mobile du rail de LAPLACE dans un régime oscillant de très faible amplitude. À cet effet, on complète le dispositif de la figure 15 par un dispositif assurant un asservissement en force. L'objectif est d'appliquer à la barre mobile une force qui compensera exactement la force d'inertie d'entrainement due à l'accélération du bâti. Pour cela, on considère un second système de rail de LAPLACE dans lequel est imposé un courant J (figure 16). La barre mobile de ce second système est rendue solidaire de la barre mobile du géophone à l'aide d'un système de fixation rigide. FIGURE 16 -- Asservissement du géophone. 43. Déterminer l'équation du mouvement de la barre mobile du géophone asservi en force. En régime sinusoïdal forcé, on considère que le courant J est relié à la f.e.m d'induction du géophone par la relation 1= -H(jw)E . (12) 44. Compléter en utilisant o, H(jw) et jw le système bouclé ci-dessous (figure 17). [Les candidats reproduiront le schéma ci-dessous sur leurs copies.] FIGURE 17 -- Schéma-bloc de l'asservissement en force du géophone. - | Z | 45. Établir l'expression de la fonction de transiert H3 -- % reliant X et Z. 4 © . Dans le cas où H{jw) est un gain pur, noté H{(jw) -- g, avec g1 positif, en déduire quelle(s) est(sont) la(les) modification(s) éventuelle(s) sur le comportement du système. g2 47. On utilise l'expression suivante, H(jw) = "--, avec g positif. Quel avantage au niveau de la fré- W SN | quence propre du système ce correcteur apporte-t-il ? Exprimer la nouvelle fonction de transfert 2 g2 © H3, où on notera wÿ, = LÉ + . L'objectif de cette correction est une rétroaction en force. En utilisant le schéma-bloc de la figure 17, déterminer l'expression de la force supplémentaire appliquée par le second rail F en fonction de ©, g2, H4 et X. Quelle est la limite basse fréquence de l'expression de cette force en régime dépendant du temps ? Comparer à la force d'inertie d'en- trainement. Conclure sur l'utilité de la correction apportée. Si on mesure la tension u (notation complexe U) aux bornes de la résistance r, quel capteur obtiendrait-on ? à QD . Au regard des questions précédentes, donner l'expression de H(jw) permettant d'avoir un contrôle à la fois sur la pulsation propre et sur le facteur de qualité du système. Comment choisir g1 et g2 de manière à compenser la force d'inertie d'entrainement et se situer en même temps en régime critique ? Si on mesure le courant 1 dans le second rail de LAPLACE via la tension u aux bornes de la résistance r, on obtient la même fonction de transfert que celle obtenue à partir de la position de la masse mais cette fois avec un ajustement possible de la fréquence propre et de la bande passante. On obtient des comportements passe-bas pour l'accélération et passe-haut pour le déplacement. Ce capteur, qui est un des plus répandus, est généralement utilisé dans la gamme basse fréquence. Néanmoins, pour un capteur large bande, un signal de sortie proportionnel à l'accélération n'est pas une bonne solution. À haute fréquence, le capteur est facilement saturé par la moindre perturbation : trafic routier, bruits divers. À basse fréquence, le système générera un signal de sortie dès que la masse n'est pas tout à fait équilibrée, le système étant sensible à fréquence nulle. Il sera donc très facilement saturé. On souhaite un signal de sortie qui aurait un comportement passe-bande pour l'accélération, comme le premier modèle de géophone mais avec une fréquence propre la plus basse possible, pour ne couper que les très basses fréquences tout en ayant une bande passante plus large. Afin d'améliorer le fonctionnement du capteur, on ajoute un élément supplémentaire qui sera l'équivalent d'un correcteur proportionnel intégral dérivé (PID). On choisit pour cela : H(jw) -- DE TR PER avec g1, 92, g3 positifs. jw (jw) 49. Exprimer la nouvelle fonction de transfert en vitesse Æ, sous la forme E je W Huy RE 3 2 | (13) JuX ju 0 ur Q! wo1 É] UD) EN 1 Donner les expressions de wo2 en fonction de &, m et g3; de 2. en fonction de Q, wo, wo2, gi 01 1 W et g3, et enfin de -- en fonction de g2, g3, wo et wp2. En supposant que + 1, tracer W qualitativement le diagramme de BODE en amplitude asymptotique. Quelle est la nature de ce capteur pour wo < w < Wo2 ? Le capteur obtenu est un sismomèêtre large bande. Le réseau français GEOSCOPE utilise de tels appareils : les Wielandt-Streckeisen STS-1 et STS-2. Ce réseau enregistre en continu les mouvements du sol. Ces mesures arrivent en temps réel au centre de données de l'IPGP (Institut de Physique du Globe de Paris) pour être stockées et analysées par les sismologues.