
X/ENS Modélisation PSI 2021
| Thème de l'épreuve | Étude d'un générateur houlomoteur en vue d'un contrôle optimal |
| Principaux outils utilisés | mécanique des fluides, transformée de Fourier, conversion de puissance, mécanique |
| Mots clefs | houlomoteur, houle, Fourier, transformateur, ALI, oscillations, embase, flotteur |
Corrigé
:👈 gratuite pour tous les corrigés si tu crées un compte
👈 l'accès aux indications de tous les corrigés ne coûte que 1 € ⬅ clique ici
👈 gratuite pour tous les corrigés si tu crées un compte
- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
👈 gratuite pour ce corrigé si tu crées un compte
- - - - - - - - - - - - - - - - - - -
Énoncé complet
(télécharger le PDF)





Rapport du jury
(télécharger le PDF)
Énoncé obtenu par reconnaissance optique des caractères
ECOLES NORMALES SUPERIEURES --- ECOLE POLYTECHNIQUE
CONCOURS D'ADMISSION 2021
VENDREDI 16 A VRIL 2021 - 5h00 -- 13h00
FILIERE PSI
COMPOSITION de MODELISATION
Durée : 5 heures
L'utilisation des calculatrices n'est pas autorisée pour cette épreuve
Si, au cours de l'épreuve, un candidat repère ce qui lui semble être
une erreur d'énoncé, il le signale sur sa copie et poursuit sa
composition en expliquant les raisons des initiatives qu'il est amené
à prendre
Étude d'un générateur houlomoteur
en vue d'un contrôle optimal
Figure 1 : Génératrice houlomotrice par l'entreprise OPT
1. Introduction et présentation du système
1.1. Généralités et cadre de l'étude
Suite à la conférence COP21 qui a eu lieu à Paris en décembre 2015, l'Union
Européenne se fixait
l'objectif contraignant des « 20-20-20 ». Cet objectif consiste à réduire de 20
% son niveau de GES
(Gaz à Effet de Serre), de porter à 20 % la part d'énergie renouvelable et
enfin d'améliorer de
20 % l'efficacité énergétique. Ces deux derniers critères ont permis
l'émergence de projets de
recherche portant sur le développement de solutions techniques innovantes
exploitant les
ressources naturelles.
Avec une des plus grandes façades maritimes du monde, la France s'est
naturellement tournée
vers l'exploitation de l'énergie marine. Celle-ci peut se décomposer en 5
grands groupes :
l'énergie marémotrice : on exploite alors l'énergie potentielle des courants de
marées en
fermant un estuaire par un barrage. Ce système a été mis en application
industriellement à
l'usine de la Rance en Bretagne. Avec une production moyenne annuelle de 500
GWh/an,
elle permet d'alimenter une ville comme Rennes ;
l'énergie éolienne en mer : on transpose le principe de l'éolienne terrestre
sur la mer, où les
vents sont plus soutenus et réguliers. À terme, on parle d'éoliennes d'une
capacité autour
de 8 MW ;
l'énergie hydrolienne : on exploite ici l'énergie cinétique des courants
marins. Le principe
est assez similaire aux éoliennes mais dans l'eau ;
l'énergie thermique des mers : on exploite une différence de température d'au
moins 20 °C
entre les eaux froides en profondeur et les eaux chaudes de surface. Le
différentiel de
température étant important, ce système est plutôt destiné aux zones tropicales
;
l'énergie des vagues : on parle aussi d'énergie houlomotrice. Le système, objet
de l'étude,
rentre dans cette catégorie.
1/17
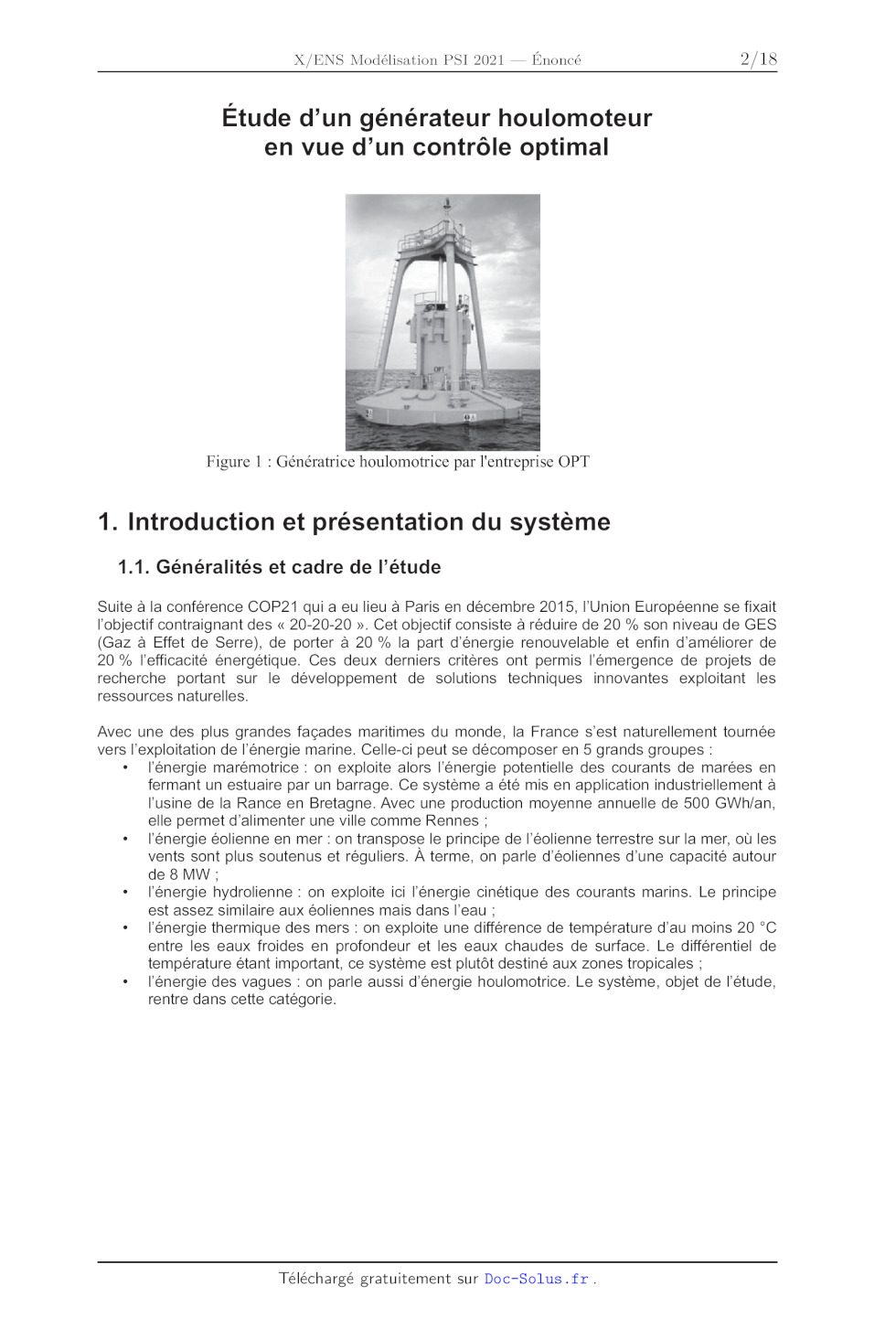
1.2. Le système PB150® et l'énergie houlomotrice
Lorsque le vent se met à souffler sur une mer calme, il déplace l'eau générant
ainsi des micros
ondulations en surface qui rident le plan d'eau. De proche en proche,
l'ondulation se développe
jusqu'à devenir une houle, pouvant se propager même en absence de vent. Sans
effet de fond, ni
d'effet de bord, la houle possède un aspect régulier ; il sera alors possible
d'estimer l'énergie et la
puissance de cette onde incidente que notre système devra convertir en énergie
électrique.
Génération des vagues Transformation houle
Mer de vent Effet de fond
7 Déferlement
à la côte
My Surface de la mer
Flotteur
| Colonne
Embase
Plateau
|
D pin
p14 M --
Figure 3 : Mise en situation de la génératrice houlomotrice PB150
Le système étudié possède un fonctionnement similaire au système PB150
PowerBuoy® de la
société Ocean Power Technology. Il est constitué d'un flotteur en liaison
glissière par rapport à
l'ensemble {colonne-plateau} appelé embase. Placés dans la zone de propagation
libre de la
houle, les deux solides flottent et sont soumis à la perturbation de l'onde
incidente, ce qui a pour
effet de modifier leur position verticale relative. Ce mouvement de translation
est transformé en
rotation par l'intermédiaire d'un système de transformation de mouvement de
type pignon-
crémaillère, ce qui entraîne une génératrice synchrone auto-piloté (MSAP).
On donne respectivement Figure 3 et Figure 4 une illustration du système en
condition de
fonctionnement et une représentation de la chaîne de conversion d'énergie.
Interface Primaire
interface Secondaire » °
Convertisseurs Statiques
| Conditionnement de l'énergie électrique altemative | "592
d pour être adaptée au réseau électrique
(Hauteur des vagues, Période)
----"
(Position, Vitesse, ...)
Figure 4 : Chaîne de conversion d'énergie de la génératrice houlomotrice.
2/17
AN
AN
... SERA
INSEE
LS:
LAS RAR RAT
NES
RES S NN
ISSU
SSSR ES RAA
APP TR RRRRNNNN
RARES EN
APAERSEEET SN
[ECS SONY
DSC NON
PR PERS
à
PASSES CEE
180°
n
C2
i
OR ET
CE
PT
ci
CTIPSETTERTTN CUT ETIOTTEE T2
w
EU
CREUSE TS ET
ETS ES
EU
HE
av
70)
110
Er)
100
80-90 90-100
Ti
ti
60 - 70
SET)
EEE)
ÉHEE
En
20
110 - 20
RS
z = n(x;t)
Figure 6 : Forme d'onde de la houle.
On cherche maintenant à déterminer les deux équations vérifiées par le
potentiel à au niveau du
fond de l'océan et au niveau de la surface libre avec l'air. On appelle a(x,t)
l'angle de la surface
libre avec l'horizontal et n la normale à la surface en un point de la surface
libre.
Q5) Montrer, à l'aide d'un schéma, que pour tout point de la surface libre as ©
et
_ _
nseé -ae, .
En tout point de la surface libre z=n{(x,t), la condition de continuité impose
ÿrñ= T1
Q6) Montrer qu'au premier ordre, cette relation s'écrit on_0®
ôt 6z
Z=n
La profondeur de l'eau par rapport à la ligne moyenne est constante et notée d
(figure 7).
Q7) Écrire la condition d'imperméabilité vérifiée par bd au niveau du fond de
l'eau supposé
plat.
Finalement, on donne l'équation de Bernoulli linéarisée dans le cas dun
écoulement non
stationnaire, reliant la pression relative p avec la hauteur de la particule
dans l'eau et le potentiel
de vitesse :
O®
= ho (1
p=-pgz-p=; (1)
Le calcul du potentiel de vitesse revient alors à résoudre le problème suivant :
A6 = 0 (2)
sl. = #4
se. = --gn (4)
= 0 (
On cherche une solution sous la forme : p(x,z,t)=w(z)-sin(k-x--c:t).
Q8) Montrer que w(z) peut s'écrire sous la forme oe(z)=A-cosh{k-z)+B-sinh(k-z)
où A et
B sont deux constantes réelles.
4/17
Q9) En combinant les relations (3), (4) et (5), montrer que la relation de
dispersion de la houle
s'écrit w°=g-k-tanh(kd).
On se place maintenant dans le cadre d'une grande profondeur par rapport à la
longueur d'onde
(d> À).
Q10) Que devient la relation précédente ?
Toute résolution faite, on arrive finalement à écrire l'expression du potentiel
de vitesse :
b(x z,t}=2%.e"z.sin(k.x- «-t)
k
Q11) En déduire l'expression du vecteur vitesse V, d'une particule fluide.
On considère un point M(x,z) au voisinage du point de coordonnées (x,,z,). On
pourra poser
x(t)=x,+x.(t) et z(t)=z,+z.{t) , avec x,(t)<
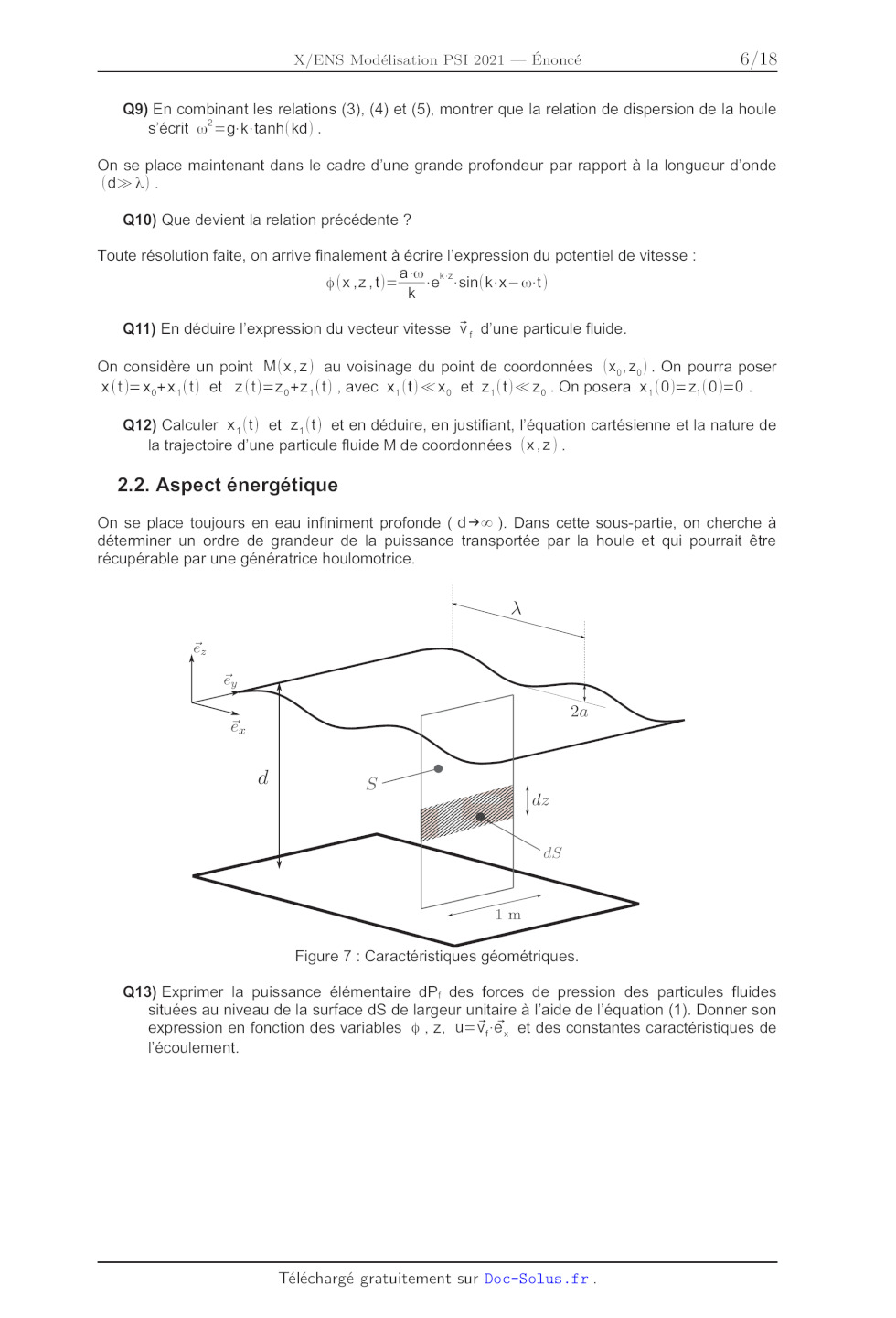
Figure 7 : Caractéristiques géométriques.
K
Q13) Exprimer la puissance élémentaire dP: des forces de pression des
particules fluides
situées au niveau de la surface dS de largeur unitaire à l'aide de l'équation
(1). Donner son
expression en fonction des variables ,z, u=v.e, et des constantes
caractéristiques de
l'écoulement.
5/17
La puissance houlomotrice Py est définie comme la puissance moyenne, sur une
période T de
-
houle, transportée pour un front d'onde de largeur unitaire. On peut écrire
Py=+ Ï, f. dP,dt .
Q14) Calculer l'expression de la puissance houlomotrice dans le cas d'une
profondeur infinie
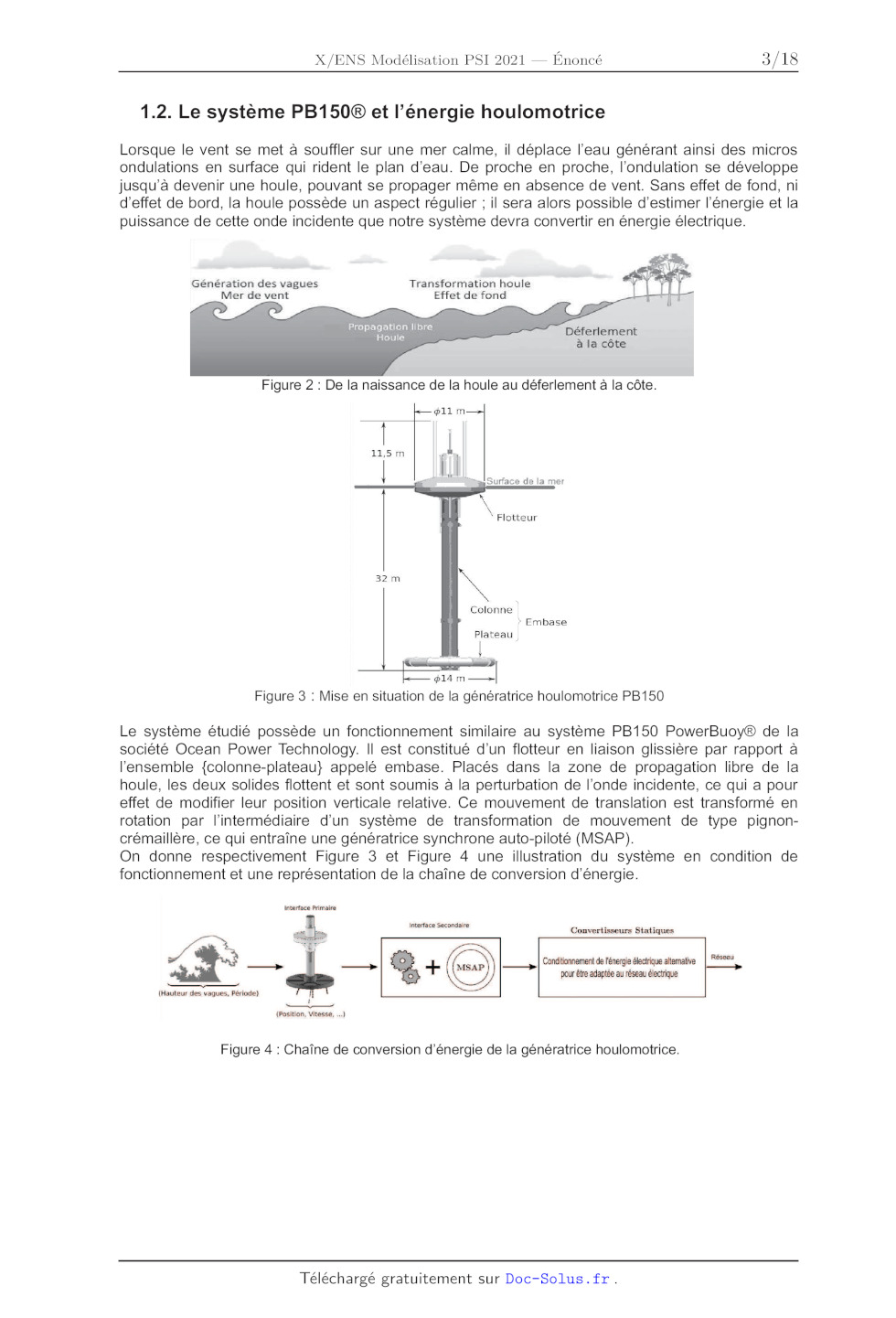
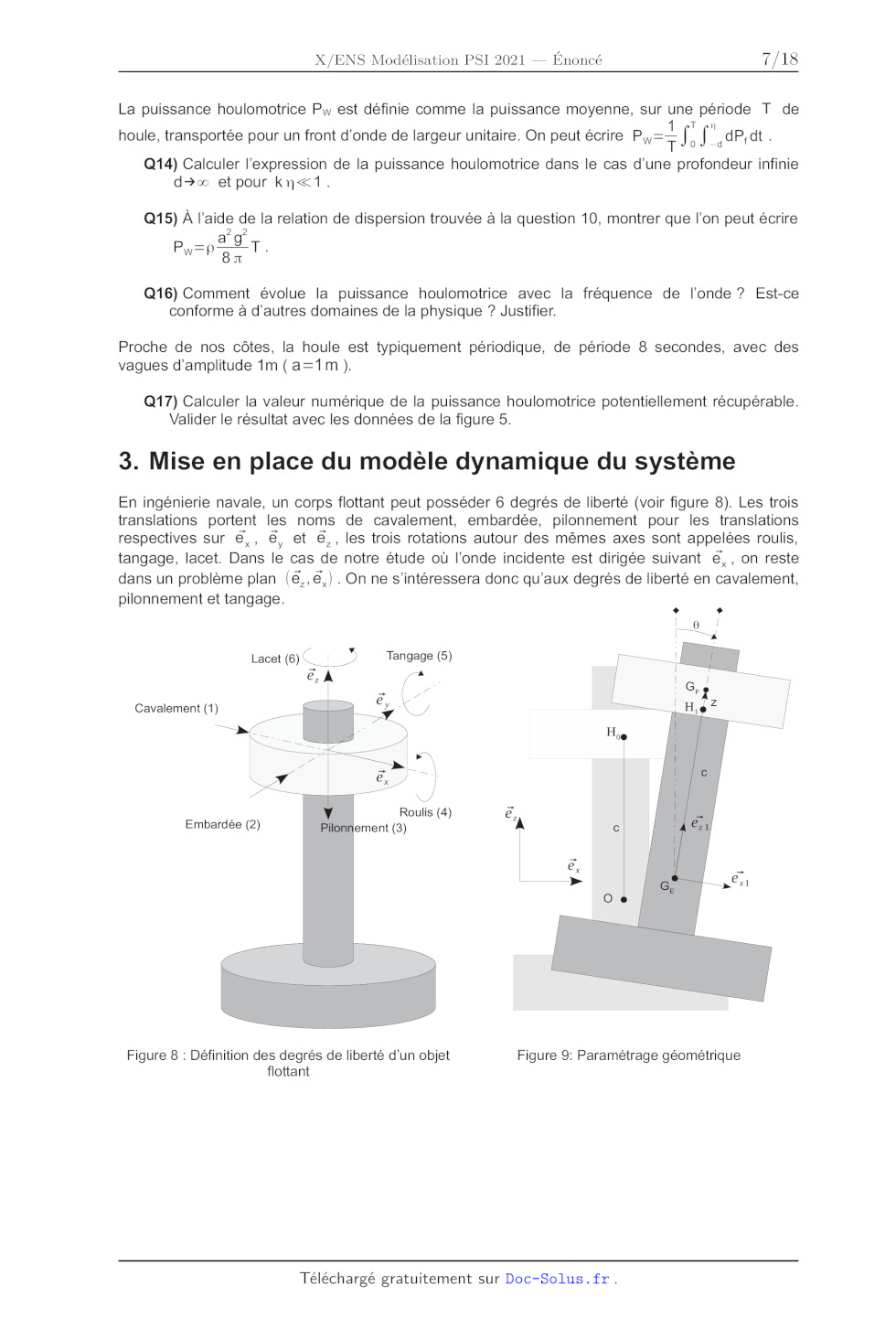
do et pour kn<«1. Q15) À l'aide de la relation de dispersion trouvée à la question 10, montrer que l'on peut écrire 2 2 Py=p= IT. 8x Q16) Comment évolue la puissance houlomotrice avec la fréquence de londe ? Est-ce conforme à d'autres domaines de la physique ? Justifier. Proche de nos côtes, la houle est typiquement périodique, de période 8 secondes, avec des vagues d'amplitude 1m (a=1m ). Q17) Calculer la valeur numérique de la puissance houlomotrice potentiellement récupérable. Valider le résultat avec les données de la figure 5. 3. Mise en place du modèle dynamique du système En ingénierie navale, un corps flottant peut posséder 6 degrés de liberté (voir figure 8). Les trois translations portent les noms de cavalement, embardée, pilonnement pour les translations respectives sur EURe,, e, et EUR,, les trois rotations autour des mêmes axes sont appelées roulis, tangage, lacet. Dans le cas de notre étude où l'onde incidente est dirigée suivant e,, on reste dans un problème plan (&6,,e,).On ne s'intéressera donc qu'aux degrés de liberté en cavalement, pilonnement et tangage. Lacet (6) Ce Cavalement (1) | Y Roulis (4) Embardée (2) Pilonnement (3) 7 Figure 8 : Définition des degrés de liberté d'un objet Figure 9: Paramétrage géométrique flottant 6/17 On cherche dans cette partie à mettre en place un modèle de comportement dynamique de la structure soumise à la houle. On vise notamment à montrer que le comportement suivant l'axe de pilonnement est découplé des autres mouvements. 3.1. Paramétrage du système Sous l'action de la houle, la structure se déplace autour de sa position d'équilibre définie par le repère fixe R,=(0,e,,e,,e) où © est confondu avec le centre de gravité G- de J X 2 ÿ ? Z lembase={Colonne+Plateau} à l'équilibre. Toujours à l'équilibre, on définit le point H, confondu avec le centre de gravité du flotteur G- tel que OH,=ce, Pour une position quelconque (voir figure 9), on pose OG-=x,(t)e,+z.(t)e, . On note H, le point tel que G-H,=c ë, . La translation relative du flotteur par rapport à l'embase est représentée par la variable z(t) telle que le centre de gravité du flotteur soit défini par H,G-=z(t)e, . Par ailleurs on pose H,G-=x.(t)e,+z.(t)e, . De plus, la cambrure de la houle étant faible, on considère que la rotation 6, les déplacements et les vitesses sont petits. Les relations géométriques et cinématiques obtenues devront donc être linéarisées à l'ordre 1. Q18) Exprimer x et z; en fonction de x, Ze, z, 6 et des caractéristiques géométriques du système. 3.2. Mise en place de l'action du fluide L'ensemble houlomoteur subit l'action de la pesanteur ainsi que l'action du fluide sur chaque surface des corps immergés. Cette partie vise à mettre en place un modèle pour ces actions du fluide sur le flotteur et sur l'embase. Q19) Donner l'expression de la résultante des actions mécaniques du fluide sur le flotteur en fonction de la pression p. Dans la partie sur l'étude de la houle, on a vu que la pression d'une particule fluide pouvait s'écrire 0 SOUS la forme P=--pgz--p; La première partie de l'expression engendre une action appelée action hydrostatique, la seconde engendre une action hydrodynamique. De manière générale pour l'action hydrostatique, on notera : _ Thel= Lis | et Thssrl= Cou | G- GE G. ,hsE G.,hs>F
Dans cette notation, les indices E et F désignent respectivement l'embase et le
flotteur. Les
paramètres géométriques de l'embase et du flotteur sont consultables à l'annexe
1.
1117
> Surface À.
H , Au | | Surface libre de l'eau
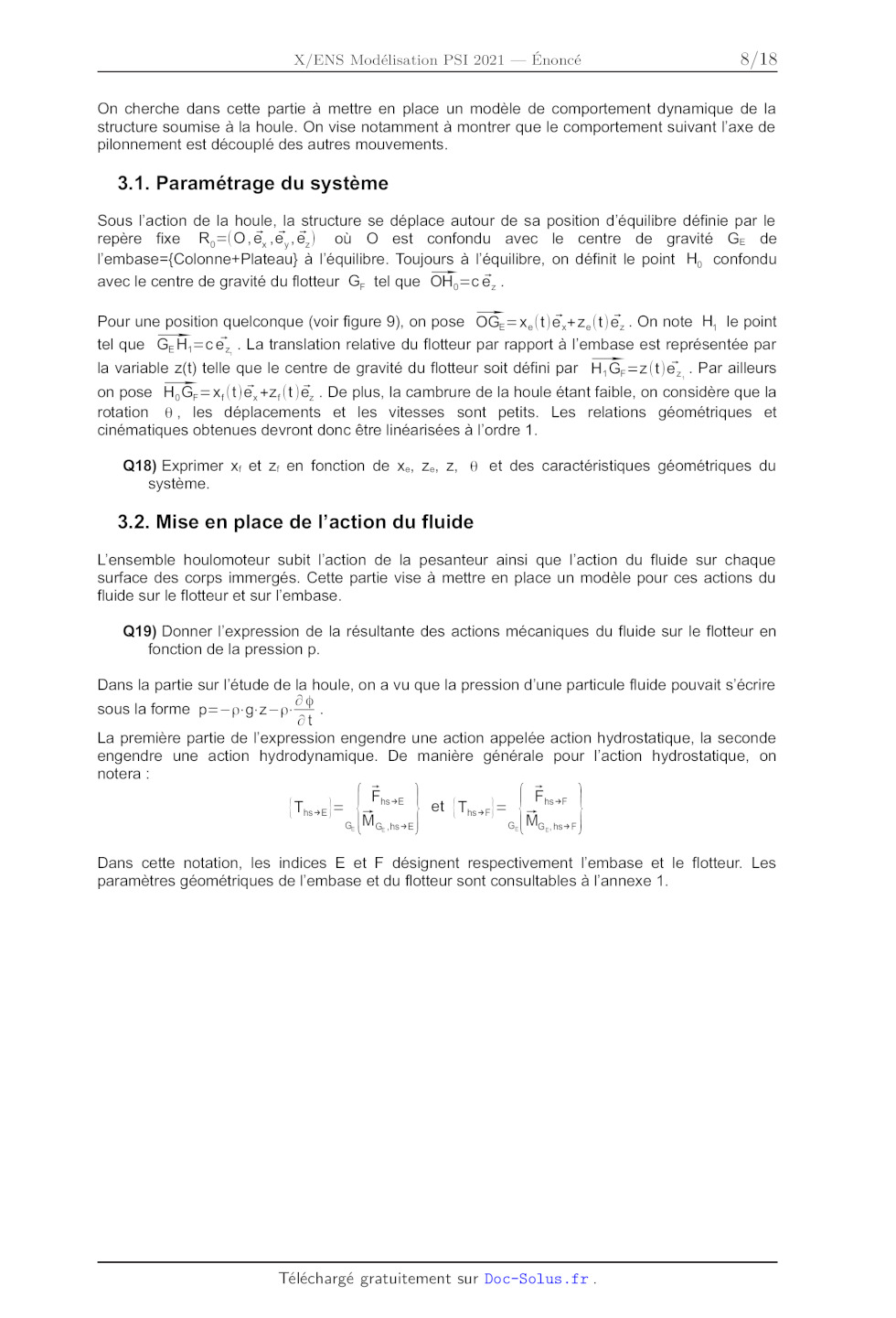
Figure 10: Volume d'eau déplacé par l'embase à l'équilibre et pour une position
quelconque.
Détermination de l'action hydrostatique du fluide
Q20) Donner l'autre nom de l'effort hydrostatique sur l'embase et son
expression générale en
fonction de V, volume du solide immergé.
Pour la suite, on indice par 0 le nom des points dans la position à l'équilibre
et par 1 dans une
position quelconque. Soit M un point de la surface À, intersection de l'embase
avec la surface
libre de l'eau sans houle à l'équilibre (figure 10). On paramètre M, par ses
coordonnées polaires
(r,,«) dans le plan (H,,6,,8,) .
En appelant V. le volume de lembase immergée à l'équilibre et sous l'hypothèse
de petits
déplacements, on peut écrire V=V- f, h,dS, où h,, est la hauteur d'un point M,
de la
surface À, par rapport à la surface libre (figure 10).
Q21) Expliquer la signification de cette équation.
On appelle é(M,)=MM, le déplacement du point M. Sous conditions de petits
mouvements, on
montre que le déplacement d'un point d'un solide est le champ de moment d'un
torseur dont la
résultante est le vecteur rotation. On peut donc écrire é(M,)=é(0)+M,0OA18e,.
Q22) En déduire une expression de la hauteur hA en fonction de z:, ru, « et 6.
Q23) Montrer alors que l'effort hydrostatique du fluide sur lembase peut
s'écrire
ne
Fise=(pg Vo--pgrr"z.) EUR;
Q24) Par analogie, exprimer l'effort hydrostatique du fluide sur le flotteur Fe
. La géométrie
du flotteur est définie dans l'annexe 1.
8/17
On cherche maintenant à déterminer l'expression du moment de l'action
hydrostatique de la mer
sur l'embase au point GE, noté MG. ne - Pour cela, on sait que l'action
hydrostatique est un
glisseur au centre de carène C, défini comme le centre de gravité du volume
d'eau déplacé par
l'embase pour une position quelconque. On peut donc écrire Mo. pose = Ge CAF
62e . On note Bh, la
position du centre de carène à l'équilibre.
Volume d'eau déplacé à l'équilibre |
Surface libre de l'eau
Figure 11 : Définition des centres de gravité associés aux volumes déplacés
Q25) À l'aide des dimensions de l'annexe 1, déterminer les expressions des
positions
verticales des points Bo et O, notées respectivement ZY et ZE dans le repère
(H,,EUR,,EUR,,ë,).
X? y? 7z
On note B; l'image de B, dans une position quelconque de l'embase, et B: le
centre de gravité
associé au volume hors de l'eau AV dû au déplacement de l'embase (figure 11).
Q26) Exprimer G-C en fonction de G-B,, G-B,, V, et AV.
> --
Q27) Déterminer GB, en fonction de Z!', ZY et 6 dans la base (6,,e,,EUR,).
Il est possible de montrer qu'une approximation de G-B, est donnée par la
relation :
us _ r2.0 _
GE B=C'e1-- 7, Ex
e
Q28) Montrer alors que le moment M _.,- S'écrit au premier ordre sous la forme
--+
4
mr |, +
Moins+e PQ (Z3, -Z6 Vote ve,
Q29) En ingénierie maritime, l'action hydrostatique est souvent appelée raideur
hydrostatique.
Expliquer ce vocabulaire à partir de son expression analytique, en faisant une
analogie
mécanique.
9/17
Pour la suite, on peut montrer que le moment de l'action hydrostatique sur le
flotteur prend une
4 4
forme similaire et peut s'écrire Me ,-=--p-g CAN RES 8e, .
Dans cette expression, Z$ et z® désignent respectivement la position verticale
du centre de
carène et du centre de gravité du flotteur à l'équilibre, et Vi le volume du
flotteur immergé à
l'équilibre.
Modèle de l'action hydrodynamique du fluide.
L'effort hydrodynamique du fluide sur un solide quelconque X. s'écrit de façon
formelle :
Fss= f, -p-Stñds où S désigne l'ensemble des surfaces immergées du solide et n
la
normale locale à la surface en un point courant de la surface immergée.
Usuellement, les hydrodynamiciens représentent le potentiel de vitesse bd comme
la superposition
de 3 potentiels, d--®+9.+% :
° __ pb. représente le potentiel de vitesse de la houle incidente en l'absence
de solide. Les
efforts engendrés par ce potentiel sont appelés efforts de Froude-Krylov.
° ___b représente le potentiel de vitesse de houle diffractée. Il correspond au
champ de houle
qui serait réfléchi par le solide si celui-ci était fixe.
Du point de vue global, les actions mécaniques dues aux champs incident et
diffracté sont
considérées comme des actions extérieures et sont déterminées par des méthodes
numériques.
On posera donc ici :
F,=F,,e,+F,e,
--
Mo ha3r M8,
T2 _ F,=F,,e,+F1,EURe
hd>E) -- M _ M. £
G: G-,hd>E -- 1Èy
° __hL représente le potentiel de vitesse de radiation. Il correspond à la
houle émise par le
flotteur lorsque celui-ci bouge en eau calme. L'action due à ce potentiel est
appelée action
de radiation.
Te =
Ge
et Tabel=
Ge
F3=F3,e;+F3,e, F4=Faxext Fe
--
et Taoel=
M, hdr3E-- M, e,
Ge
M, nar>r = M,8,
Pour la suite, toutes ces composantes seront considérées connues.
Modèle de l'action du récupérateur d'énergie
Pour un fonctionnement normal, le système de conversion d'énergie mécanique en
énergie
électrique (interface secondaire sur la figure 4, notée IS) agit sur
l'interface primaire (embase et
flotteur en interaction avec la houle). C'est cette action qui, par
l'intermédiaire d'une transformation
de mouvement permettra de faire tourner la génératrice synchrone. Cette action
mécanique sera
modélisée comme un glisseur suivant l'axe (G;,e,). On pose :
F,=FE
Tiser)= | " ns
GE
0
Le théorème des actions réciproques permet d'écrire [Ts =-- [TS EUR) .
3.3. Modèle dynamique
On note mE et mr les masses respectives de lembase et du flotteur. Les
caractéristiques
dimensionnelles des solides sont données en annexe 1 et on considère que toutes
les pièces
(flotteur, colonne, plateau) sont homogènes. On supposera que les déplacements
restent petits et
on ne gardera que les termes d'ordre 1.
10/17
Q30) Donner la forme des matrices d'inertie de l'embase et du flotteur en leur
centre de
gravité.
Le moment d'inertie d'un cylindre plein de rayon Rc et de hauteur hc, de centre
de gravité G,
R° h°
autour de l'axe (G,ÿ) perpendiculaire à son axe de révolution est donné par LE
Me + Me :
où mc est la masse du cylindre.
Q31) En déduire l'expression de 1,-, moment d'inertie du flotteur au point G-
autour de la
direction ë,. Vous donnerez le résultat en fonction de mÆ et des
caractéristiques
dimensionnelles données en annexe 1.
Pour la suite, on note 1, le moment d'inertie de l''embase au point Gr autour
la direction EUR.
On isole dans un premier temps l'ensemble >? ={embase+flotteur}.
Q32) Calculer le torseur dynamique de l'ensemble > au point GE par rapport au
repère
galiléen, en linéarisant à l'ordre 1. Vous exprimerez le résultat en fonction
des dérivées des
paramètres (x.,z.,0,z) et des constantes géométriques et inertielles du
problème.
Q33) Écrire le principe fondamental de la dynamique appliqué au système >.
On obtient alors un système de 3 équations à 4 inconnues (x.,z.,0,z). La
dernière équation du
e ? e J J
mouvement est obtenue en isolant uniquement le flotteur.
On isole maintenant le flotteur.
Q34) Quelle équation particulière du principe fondamental de la dynamique
appliqué au flotteur
doit-on écrire pour obtenir une équation du mouvement ?
Q35) Écrire et linéariser cette équation, et former le système de 4 équations à
4 inconnues
(x,,Z.,0,2Z).
e' 1
Q O
S &
= 0.5
| de
0 Peesgse OCÉPESEÉESERÉCERCÉ
4 0.5 I 1.5 295 3 9.9 4
w [rad /s] w [rad /s]
Figure 12 : RAO en amplitude et en vitesse pour l'houlogénérateur.
Q39) interpréter les courbes de la figure 12, notamment par le comportement
basse
fréquence. Quelle est la fréquence optimale de la houle pour la récupération
d'énergie ?
12/17
4. Récupération optimale de l'énergie des vagues
Les parties précédentes ont montré que le mouvement du flotteur du système PB150
POWERBUOY était géré par des équations complexes, faisant intervenir plusieurs
physiques.
Néanmoins, à l'instar de tout système mécanique possédant un degré de liberté,
son mouvement
peut être piloté pour pouvoir récupérer un maximum d'énergie fournie par la
force qui le met en
mouvement. Cette partie vise à étudier conceptuellement la stratégie de
commande permettant
cette récupération énergétique optimale.
Pour simplifier l'étude, le problème est considéré unidirectionnel. Le flotteur
se déplace
verticalement, et sa vitesse verticale est notée V {t). II subit une force
verticale F(t) qui peut se
décomposer en F(t)=F,(t)+F (t) où F,(t) est la force de la houle, et F(t) la
force que lui
fournit tout le système qui met en rotation le moteur synchrone. L'énergie que
le flotteur transmet à
toute la chaîne de motorisation est E=-f F(t)V,(tjat=[ (F,(t)-F(t)}V,(t)dt.
Tous les
Signaux physiques sont réels.
-- jt
On note X (« dt la transformée de Fourier de la fonction X. Le théorème
= J': X(be
de Parseval permet de démontrer que pour toutes fonctions X:t-X{t) et Y:t-+Y{t)
à valeurs
dans IR , on a x v(tat= [TX (0) Y(-o)do.
Q40) Démontrer que l'énergie fournie par le flotteur à la chaîne de
motorisation peut s'écrire
r"
ef" F.(o) Vi (w)-F(w)V'(w)de où V: est le complexe conjugué de V
TT -- O0
Q41) Démontrer que Ed fournie par le flotteur à la chaîne de motorisation peut
aussi
s'écrire E, = JS F,( o)+F (o)V,.(o)-F(w)V(o)-F" (0) V.(w)de .
On a montré que le comportement dynamique du système est modélisé par l'équation
(joM+D-jK/w)V,(w)=F(w) , où M représente le terme de masse, D le terme
d'amortissement
de K le terme de raideur.
Q42) Vérifier que l'énergie fournie par le flotteur à la chaîne de motorisation
peut aussi
s'écrire :
EL
Est fe
avec a(w)=Fi(0)F;(o)+2D(F,(o)V; (w)+F "(0 1V (a ae
Q43) Démontrer que a(w)=|(joM+D-jK/o) V.(o)+E,(w)}{(joM+D-jK/o) V(o)+E,(ow) .
Q44) En déduire que l'énergie maximale que le système peut récupérer du
mouvement de la
1 rÙ
houle est Eine 5 x Jo Ff
dw, et indiquer pour quelle valeur de l'effort F. elle est
atteinte.
Q45) Représenter le schéma bloc du système permettant d'aboutir à un contrôle
de la vitesse
de déplacement du flotteur tel que l'énergie des vagues soit récupérée au
maximum.
L'entrée de ce schéma bloc sera F., et la sortie V.. Ne mettre qu'un seul bloc
dans la
chaîne directe et qu'un seul bloc dans la chaîne de retour.
13/17
5, Mesure du courant créé
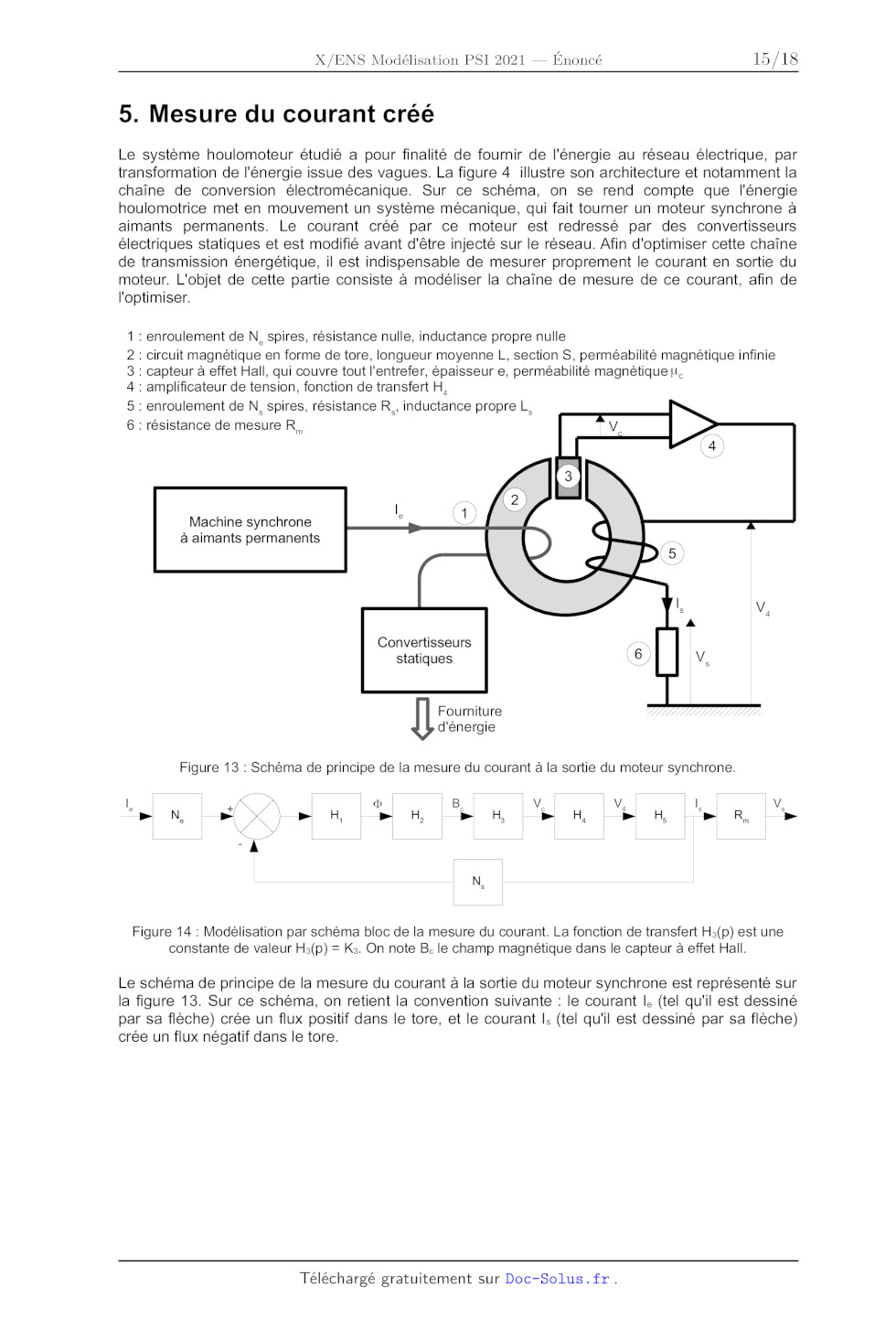
Le système houlomoteur étudié a pour finalité de fournir de l'énergie au réseau
électrique, par
transformation de l'énergie issue des vagues. La figure 4 illustre son
architecture et notamment la
chaîne de conversion électromécanique. Sur ce schéma, on se rend compte que
l'énergie
houlomotrice met en mouvement un système mécanique, qui fait tourner un moteur
synchrone à
aimants permanents. Le courant créé par ce moteur est redressé par des
convertisseurs
électriques statiques et est modifié avant d'être injecté sur le réseau. Afin
d'optimiser cette chaîne
de transmission énergétique, il est indispensable de mesurer proprement le
courant en sortie du
moteur. L'objet de cette partie consiste à modéliser la chaîne de mesure de ce
courant, afin de
l'optimiser.
. enroulement de N, spires, résistance nulle, inductance propre nulle
: circuit magnétique en forme de tore, longueur moyenne L, section S,
splitéabilité magnétique infinie
: capteur à effet Hall, qui couvre tout l'entrefer, épaisseur e, splitéabilité
magnétique u.
. amplificateur de tension, fonction de transfert H,
- enroulement de N, spires, résistance R,, inductance propre L,
. résistance de mesureR, V rs
Ta
O O1 RON --
2.
Machine synchrone me
à aimants permanents
Convertisseurs
statiques \2y
Fourniture 7 D
d'énergie
Figure 13 : Schéma de principe de la mesure du courant à la sortie du moteur
synchrone.
L A p B, V. V, V.
D N, D» D À D À, D À, D 1, nm H, R, D
j |
Figure 14 : Modélisation par schéma bloc de la mesure du courant. La fonction
de transfert H:(p) est une
constante de valeur H:(p) = K3. On note B. le champ magnétique dans le capteur
à effet Hall.
Le schéma de principe de la mesure du courant à la sortie du moteur synchrone
est représenté sur
la figure 13. Sur ce schéma, on retient la convention suivante : le courant Il,
(tel qu'il est dessiné
par sa flèche) crée un flux positif dans le tore, et le courant I, (tel qu'il
est dessiné par sa flèche)
crée un flux négatif dans le tore.
14/17
Q46) B: représente le champ magnétique dans le tore, et B« le champ magnétique
dans le
capteur à effet Hall. Déterminer une relation entre ces deux champs magnétiques.
Q47) Déterminer la valeur de l'excitation magnétique H: dans le tore.
Q48) Déterminer l'expression du flux magnétique dans le tore, en fonction de
14, , Ne, Ns, e, S
et LL...
La figure 14 représente une modélisation par schéma bloc de la mesure du
courant.
Q49) Déterminer les expressions analytiques des fonctions de transfert H:, H;
et H; en fonction
des grandeurs physiques qui apparaissent sur la figure 13, dans le domaine de
Laplace.
On suppose dans un premier temps que l'amplificateur est un simple gain pur.
Par conséquent, la
fonction de transfert H, est une constante de valeur K4.
|, (p)
Q50) Exprimer la fonction de transfert H{p)= | (p) et déterminer son gain Ki et
sa constante
de temps T; en fonction de Ne, Ns, ue, Rs, Rm, Ls, EUR, K3 et Ka.
Q51) Représenter le diagramme de Bode de la fonction H(p). Indiquer sur quelle
plage de
pulsation la mesure doit être faite pour avoir une bonne image de lk.
4.10 *
L'application numérique permet d'obtenir H{p)=-------- .
1+2.10 p
Q52) La résistance de mesure valant R,=200Q, déterminer la valeur numérique de
la
tension V. sile moteur délivre 100 A dans le domaine des basses fréquences.
Q53) On suppose que le moteur délivre un courant sinusoïdal, de pulsation «.
Déterminer
l'expression littérale de la valeur efficace maximale du courant que le moteur
peut délivrer,
si on souhaite limiter la valeur maximale du champ magnétique à la valeur Br.
La chaîne de mesure est située juste à la sortie du moteur, donc sur le système
houlomoteur, en
pleine mer. Or, en pleine mer, on peut avoir des différences considérables de
température, suivant
qu'on est plongé dans la mer ou exposé au soleil. Par conséquent, il est
nécessaire que le
système de mesure du courant soit insensible à une perturbation extérieure
telle que la
température ambiante.
Q54) Üne variation de température agit surtout sur le capteur à effet Hall, et
modifie la valeur
k dk
numérique de K; à un niveau pouvant aller jusqu'à une variation Ke =+10%.
Montrer
3
qu'actuellement le système de mesure du courant est soumis à cette perturbation.
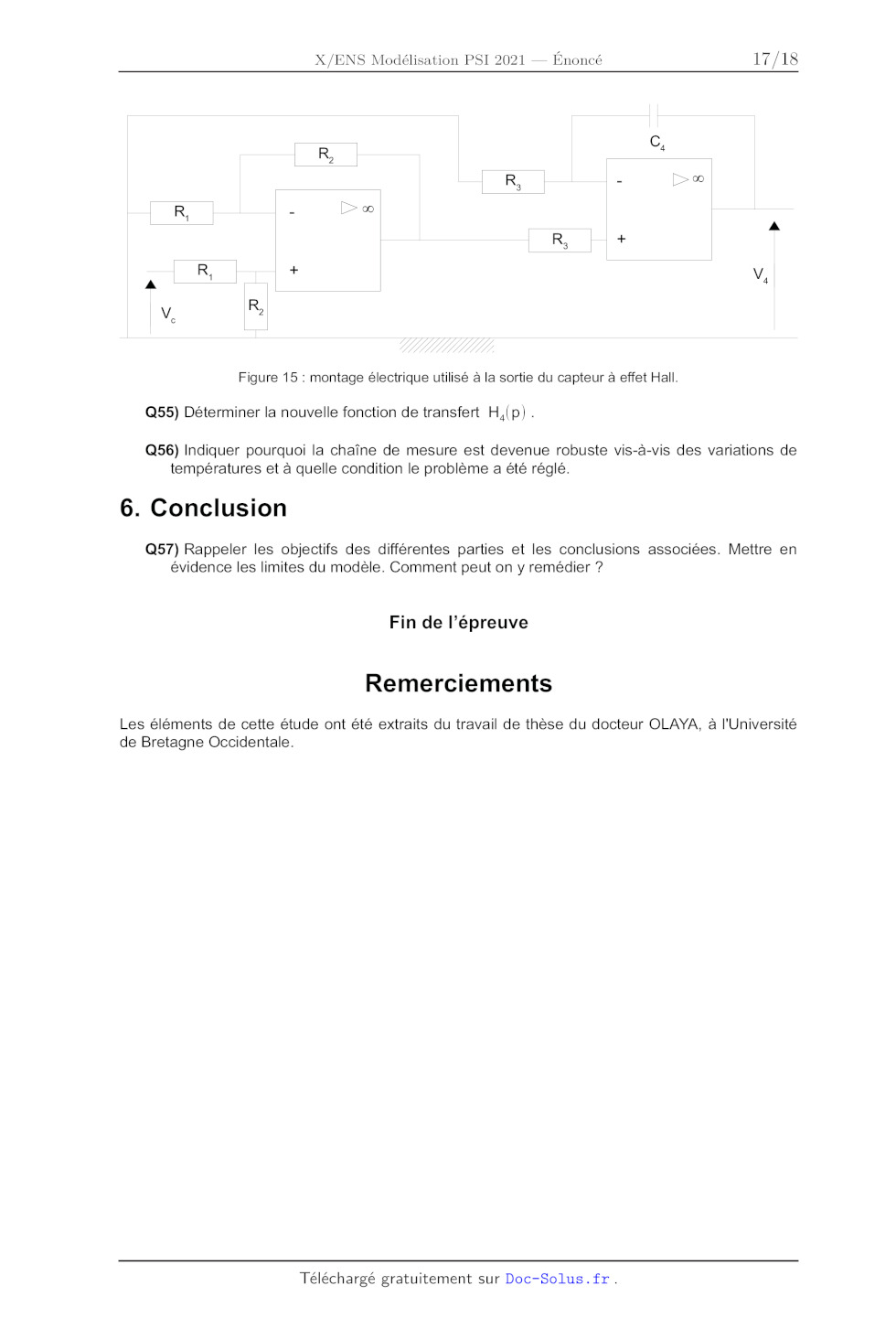
Pour lutter contre les effets de la température dans la chaîne de mesure, on
introduit le montage
électronique décrit sur la figure 15. Les amplificateurs opérationnels
fonctionnent en régime
linéaire.
15/17
OQ _--
77
Figure 15 : montage électrique utilisé à la sortie du capteur à effet Hall.
Q55) Déterminer la nouvelle fonction de transfert H,(p).
Q56) Indiquer pourquoi la chaîne de mesure est devenue robuste vis-à-vis des
variations de
températures et à quelle condition le problème a été réglé.
6. Conclusion
Q57) Rappeler les objectifs des différentes parties et les conclusions
associées. Mettre en
évidence les limites du modèle. Comment peut on y remédier ?
Fin de l'épreuve
Remerciements
Les éléments de cette étude ont été extraits du travail de thèse du docteur
OLAYA, à l'Université
de Bretagne Occidentale.
16/17
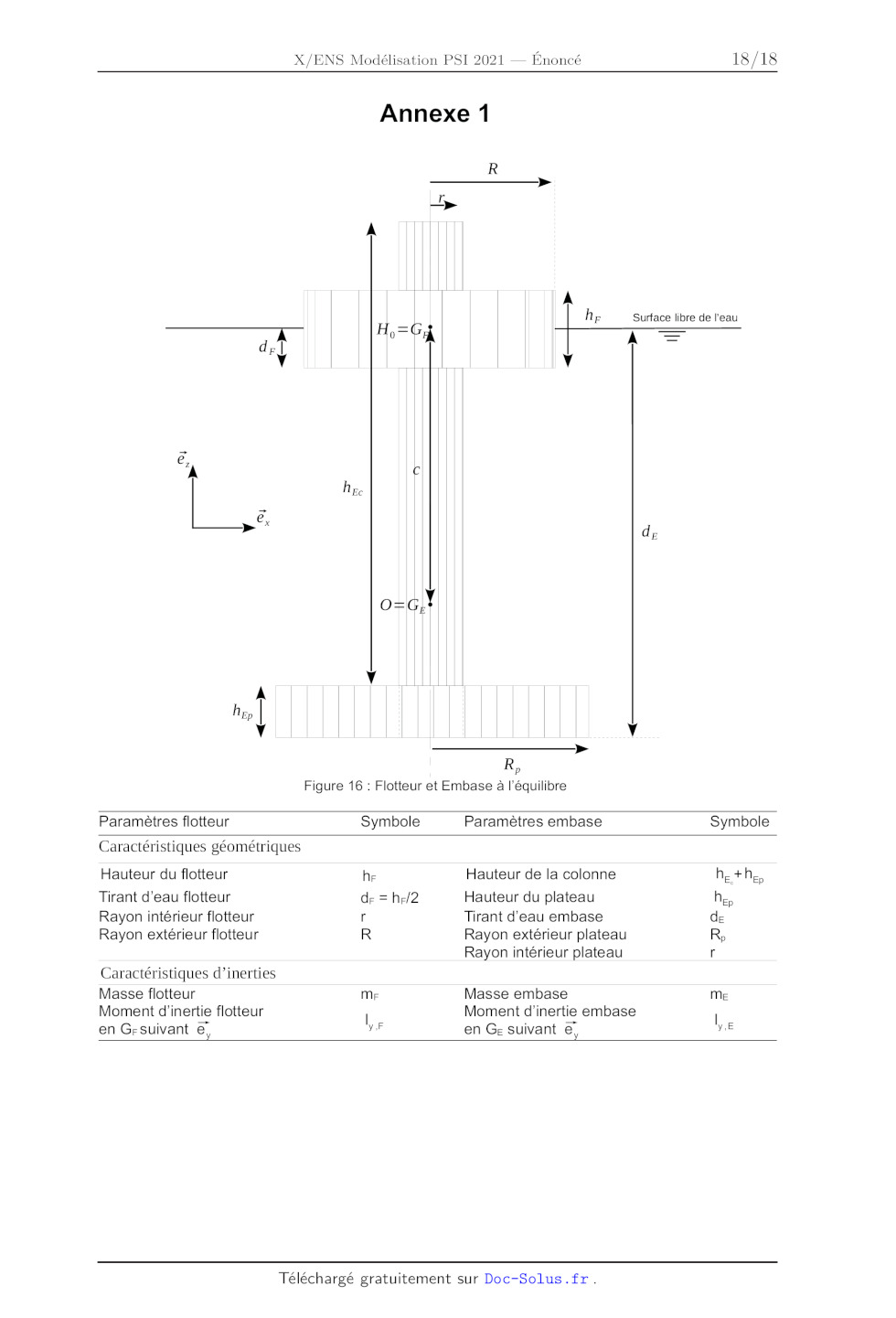
Annexe 1
R
>
TD
À
À
_ | h; Surface libre de l'eau
À 0 Q À --
dr]
Y Y
e,
À C
hze
e,
»- ds
O0=G;
Y |
À
h;,
À A A A A À EE Y
»-
R,
Figure 16 : Flotteur et Embase à l'équilibre
Paramètres flotteur Symbole Paramètres embase Symbole
Caractéristiques géométriques
Hauteur du flotteur hr Hauteur de la colonne he +hE,
Tirant d'eau flotteur dr = hr/2 Hauteur du plateau he,
Rayon intérieur flotteur r Tirant d'eau embase dE
Rayon extérieur flotteur R Rayon extérieur plateau Ro
Rayon intérieur plateau r
Caractéristiques d'inerties
Masse flotteur Mr Masse embase ME
Moment d'inertie flotteur | Moment d'inertie embase |
y,F Y,E
en G-suivant ë,
en GE suivant ë,
17/17